混凝土泵车X型支腿下车结构有限元分析
混凝土泵车支腿反力与抬腿量分析

>" 为线段 47 到线段 56 的距离, >! 为线段 45 到线段 67 的距离, >= 为回转中心 #" 到线段 45 的 距离。 设因力矩 ’ 而引起的总的反力为 34" 、35" 、36" 、 则 37" ,
J・ #C@( * "・ @AB’ ) * L7M )7 & $7 * L7M & ";#<=( "・ #C@’ - J・ @AB(
( !9>!) ) ? +!+ ] # & ";#<=[ 4D5 ’, & ’・@AB$ $ * #) ’% & ’・ #C@( 令 1、 则: 2、 3 三点的支腿反力分别为 $1 、 $2 、 $3 , * 0( $1・ !+ * .・ ( !+>!! ) !+ * !/ )- ’, & 7 &’23 & 7: .・EF - 0・E0 * $3・E3 - ’% & 7 &’12 & 7: $ 1 - $ 2 - $3 * . * 0 & 7 &$ & 7:
4)5
由式( 可以求得: G)
!! !/ ’ $1 & ( ・. - ( ・0 * , )* ) )* )
按三点支承的支腿反力计算 在按四点支承计算支腿反力时, 有时某一支腿反
力会出现负值,但根据实际情况,这是不可能的。因 此, 如果计算出现负值, 应改为三点支承来计算。 假设 $% 出现负值, 则令 $% & 7, 按 1、 2、 3 三点支 承来计算。 混凝土泵车实际作业时大部分情况下是三 点支承,所以在此处将考虑 1 与 2、% 与 3 支腿叉开 图 !) , 线 的实际情况, 即 %、 1、 2、 3 四点呈梯形分布 ( 段 12 与 ( 轴之间的夹角为 #, # 是矢量: !) 8!9 , #为 正; !) : !9 , # 为负。根据图 ! 所示几何关系可得:
混凝土泵车支腿门板接触非线性计算及试验验证

混凝土泵车支腿门板接触非线性计算及试验验证王 湘,王文辉,张立业,孟广伟(吉林大学 机械科学与工程学院,吉林 长春 130025;)[摘要]以混凝土泵车伸缩支腿门板为研究对象,利用有限元分析软件对其进行接触分析,并且根据计算结果制定试验方案,通过对试验数据与计算数据进行对比,验证混凝土泵车支腿门板接触非线性计算方法的准确性,为系列支腿产品的优化和改型设计提供数值支持,提升设计效率。
[关键词]泵车;伸缩腿;有限元;接触分析[中图分类号]TU646 [文献标识码]B [文章编号]1001-554X (2015)11-0065-04Concrete pump truck door sheet structure contact nonlinear calculationand experimental verificationWANG Xiang ,WANG Wen -hui ,ZHANG Li -ye ,MENG Guang -wei1 概述为了保证混凝土泵车的抗倾翻能力,支腿应具有足够的跨距,各厂家推出了伸缩支腿(见图1)。
支腿门板是伸缩支腿间传力的主要结构(如图2所示),当支腿垂直油缸着地时,后一级的伸缩腿盖板将与前一级伸缩腿的门板相互挤压,其强度和刚度是保证支承结构性能的前提。
以往的支腿结构计算,并未对门板做过多的分析,忽视了支腿盖板侧面对门板的接触挤压。
支腿门板2支腿门板1二级伸缩腿三级伸缩腿一级伸缩腿垂直油缸图1 伸缩支腿结构简图支腿门板1二级伸缩腿盖板A BA B图2 一级和二级伸缩腿搭接处结构简图本文以某混凝土泵车支腿为研究对象,其水平支腿由3节伸缩腿组成,分别是一级伸缩腿、二级伸缩腿、三级伸缩腿(见图1),这3节伸缩腿均为箱型结构(见图3),其长度分别是2900mm 、2940mm 、2810mm 。
图3 支腿截面形状本文首先应用ANSYS 中几何大变形+接触分析+非线性计算方法对结构进行有限元计算,对计算结果进行分析,并根据计算结果进行试验,验证有限元计算方法的正确性,为支腿门板结构有限元分DOI:10.14189/ki.cm1981.2015.11.002[收稿日期]2015-08-05[通讯地址]王湘,吉林省长春市吉林大学南岭校区基础科学实验馆220室专题研究SPECIAL RESEARCH析确定一种最优的计算方法,并为支腿的快速设计和优化提供数据支持。
基于有限元分析的混凝土泵车臂架轴套连接强度计算方法

基于有限元分析的混凝土泵车臂架轴套连接强度计算方法田相玉;吴德志;陈泽【摘要】结合工程实例,阐述了臂架轴套连接强度在臂架结构设计中的重要性,而现有臂架设计计算规范未充分考虑轴套的连接强度.文章在理论分析的基础上,建立实体简化数学模型,借助于有限元分析软件ANSYS非线性接触模块对轴套的连接进行受力分析.结果表明,该方法可精确评估轴套的连接强度,为臂架的可靠性设计提供参考和依据.【期刊名称】《建筑机械(上半月)》【年(卷),期】2019(000)001【总页数】6页(P48-52,58)【关键词】混凝土泵车;连接强度;有限元分析;接触非线性【作者】田相玉;吴德志;陈泽【作者单位】国家混凝土机械工程技术研究中心,湖南长沙 410013;国家混凝土机械工程技术研究中心,湖南长沙 410013;国家混凝土机械工程技术研究中心,湖南长沙 410013【正文语种】中文【中图分类】TH123+.3泵车臂架是典型的薄壁箱型结构,焊接是最主要的连接方式,焊缝强度很大程度上决定了臂架的可靠性。
若设计时由于参数(或结构形式)选择不当而使轴套与腹板连接处于高应力区域,表现为疲劳强度低。
在泵车工作过程中,若连接焊缝发生开裂未及时发现,随着裂纹的扩展而导致结构失去承载能力而断裂,将会产生严重的伤亡事故和经济损失。
据统计,因连接焊缝问题造成的断裂事故占臂架失效总故障的85%左右,故在结构设计时合理地进行强度分析是提高焊接件可靠度的必要条件。
鉴于臂架结构特点,通常设计校核时主要侧重于主体结构的强度、刚度和稳定性等。
综合考虑计算效率、精确度等因素,设计者通常采用片体(板壳+梁组合单元)有限元模型进行仿真计算,如图1所示。
历经台架试验和工程实践验证,上述方法对于臂架结构整体的承载性能评估,精确可靠,简便时效。
图1 臂架板梁组合有限元分析模型分析板梁组合有限元仿真计算结果,发现结构整体的应力分布是连续的,但轴套与腹板连接处的应力分布是不连续的、突变的,且局部应力峰值往往超过母材的屈服极限,如何评价此处的计算结果,大多数设计者选择忽略而单凭设计经验。
真实案例分析混凝土泵车故障原因及修复方法
真实案例分析混凝土泵车故障原因及修复方法随着国家基础设施投资的持续加快和商品混凝土政策的进一步规范,混凝土泵车作为一种专用的混凝土施工设备,越来越受到市场的青睐。
混凝土泵车的布料臂架具有变幅、曲折和回转等特点,在臂架活动范围内可以任意改变混凝土的浇注位置,作业灵活,施工效率高,广泛应用于各种施工场地。
一、真实案例分析:泵车臂架开裂泵车臂架主要是由高强钢板焊接组成的箱体结构,高强钢具有比强度高的优点,但碳当量较高,焊接时母材的熔入性不好,不容易焊透,容易引发疲劳开裂。
施工作业时,混凝土泵车输送缸交替循环动作,使得臂架承受具有一定周期的交变应力,加剧了结构件疲劳程度。
因此,混凝土泵车臂架开裂是泵车生产企业共同面临的常见问题之一。
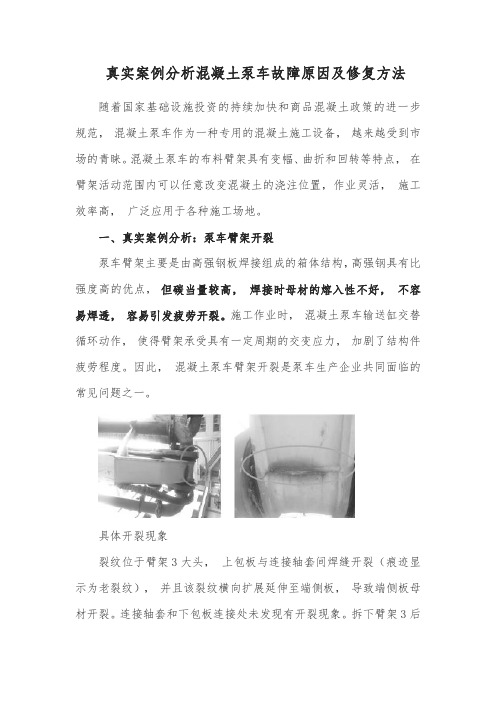
具体开裂现象裂纹位于臂架3大头,上包板与连接轴套间焊缝开裂(痕迹显示为老裂纹),并且该裂纹横向扩展延伸至端侧板,导致端侧板母材开裂。
连接轴套和下包板连接处未发现有开裂现象。
拆下臂架3后发现臂架2与臂架3之间的连接销轴、铜套磨损异常。
该车开裂故障非常严重,使用安全已无法保证,一般情况下需要更换臂架3。
臂架开裂示意图可以根据开裂的属性来判断开裂的裂纹属于疲劳裂纹,产生的原因有如下几点:1、结构因素该泵车臂架采用R形布置,为了降低臂架收拢时整车自身质量重心,臂架3采用折弯结构。
当臂架打开形成悬臂梁时,臂架3产生附加扭转应力,并在臂架头部集中。
在水平工况下,连接轴套上方端侧板(即端侧板母材开裂处)最大拉应力达到439MPa。
另外,该泵车臂架3大头上包板与连接轴套切线之间存在约135°夹角,形成拐点,尽管该处应力值并不大,水平工况下约150MPa,但在长期交变应力作用下仍会产生应力集中。
2、焊接因素该泵车臂架采用高强钢板,而连接轴套采用35钢,35钢属于中碳钢,这2种材料焊接时对工艺条件要求较高,所形成的焊缝含C量偏高,塑性、抗冲击能力不佳,在应力作用下容易成为裂纹源。
3、磨损因素该泵车臂架2与臂架3销轴、铜套磨损存在偏磨现象,进一步加剧了臂架的附加应力。
X 型支腿

X 型支腿1.X型伸缩支腿结构便捷、工况适应能力强三一新品泵车全面采用X型伸缩支腿结构,这种支腿具有结构简单,维修方便,良好受力,单侧支撑等优点。
与传统的摆动型支腿打开时必须转动到支撑位置相比,X支腿由于自身的结构优势,支腿只需沿直线移动到支撑位置,明显节省了支腿打开动作占用的空间。
2.单侧支撑功能适应狭小场地施工传统的泵车施工时需要展开四个支腿,以保证泵车的稳定性,而三一泵车的单侧支撑功能可根据场地要求,调整支腿展开位置进行施工,节省的空间可以通过一辆汽车,这样有效提高了泵车对场地的适应性,使整车占地空间大幅减小,满足了狭小场地施工要求。
这是新产品的最瞩目焦点。
3.防倾翻控制技术安全通过对各种工况下泵车的即时状态以及误操作、地面坍陷等造成泵车倾翻事故的主要原因的分析,三一研发工程师经过反复试验推出了防倾翻控制技术,能自动分析、判断泵车倾翻的可能性,及时报警,同时限制臂架动作,增强了施工的安全性与智能化水平,让客户可以放心使用。
安装电子水平仪和压力传感器,实时检测泵车的倾斜度及变化情况,当纵向倾斜超过5度、横向倾斜超3度、工作过程中泵车倾斜度变化较快时,自动报警并限制臂架动作。
实时检测每个支腿的受力情况,当受力支腿少于两个时,自动报警并限制臂架动作。
4.SYMC专用控制系统便捷高效较之传统的PLC控制系统,简单化布线,提高整体可靠性与维修方便性;控制界面更加友好,抗干扰能力更强;运算速度更快,可适应-20°C~+70°C的工作温度范围,具有更强的防水防尘能力;故障率下降80%,为客户带来控制系统的全新感受。
独有的高低压自动切换专利技术,只需一个按扭,即可随意切换,有效提高泵送压力。
5.臂架减振技术高稳定性应用多体系统动力学、控制学、流体力学等先进理论方法,采取机电液控一体化研究方案,通过具有国际专利技术的控制装置,解决了困扰行业已久的臂架振动问题,既改善了臂架操作舒适性,将臂架抖动降低65%,控制在200mm以内,又降低臂架应力脉动,提高了浇注施工稳定性和臂架使用寿命。
基于有限元分析的混凝土泵车底架支腿整体计算及测试
58 建设机械技术与管理 2022.03 1 前 言在混凝土泵车结构中,底架支腿作为主要的受力部件,在混凝土泵车泵送工作时,承受整车重力和上装臂架的倾翻力矩,所以底架支腿整体受力的准确计算,直接关系到混凝土泵车的安全,需进行重点关注。
但传统的底架支腿设计计算方法难以考虑泵车布料时多工况、多角度等实际问题,从而难以准确知悉整个结构的实际受力状况。
目前,较为普遍的方法是选取支腿受力最大的典型工况进行分析,再通过实车测试进行验证[1-2],实践证明该方法可满足泵车的使用要求。
基于此,本文以一款混凝土泵车为原型,选取代表性工况对底架支腿结构进行有限元分析,并通过实车测试验证模型的准确性。
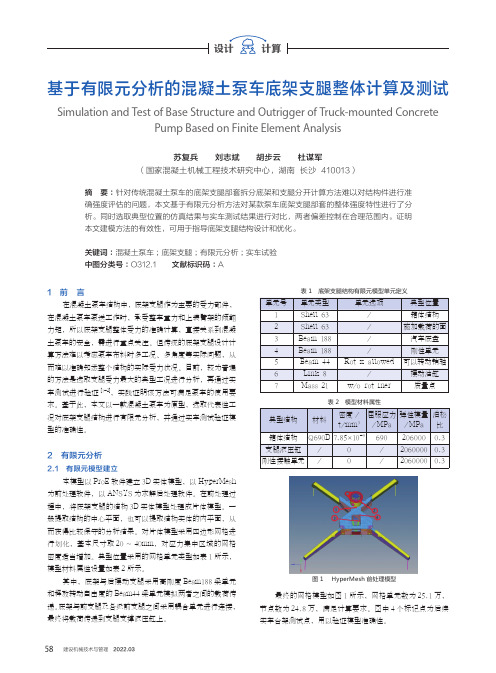
2 有限元分析2.1 有限元模型建立本模型以ProE 软件建立3D 实体模型,以HyperMesh 为前处理软件,以ANSYS 为求解后处理软件。
在前处理过程中,将底架支腿的结构3D 实体模型处理成片体模型。
一般提取结构的中心平面,也可以提取结构实体的内平面,从而获得比较保守的分析结果。
对片体模型采用四边形网格进行划化,基本尺寸取20~40mm,对应力集中区域的网格密度适当增加。
典型位置采用的网格单元类型如表1所示,模型材料属性设置如表2所示。
其中,底架与后摆动支腿采用高刚度Beam188梁单元和释放转动自由度的Beam44梁单元模拟两者之间的载荷传递。
底架与前支腿及各级前支腿之间采用耦合单元进行连接,最终将载荷传递到支腿支撑液压缸上。
基于有限元分析的混凝土泵车底架支腿整体计算及测试Simulation and Test of Base Structure and Outrigger of Truck-mounted ConcretePump Based on Finite Element Analysis摘 要:针对传统混凝土泵车的底架支腿部套拆分底架和支腿分开计算方法难以对结构件进行准确强度评估的问题,本文基于有限元分析方法对某款泵车底架支腿部套的整体强度特性进行了分析。
基于有限元分析的支腿设计与使用要求

472017.05建设机械技术与管理流动式起重机是工程起重机中使用最为广泛的一种起重机。
其中汽车起重机及全地面起重机占比最大,总共占据了总销量51%的份额,共计9500多台。
这些起重机普遍采用四支腿支承作业,减小了施工场地平整度对起重机占位的影响。
但这也导致这类起重机工作场地较为恶劣,常有支腿垫高及不能全伸的情况存在。
这些限制不仅影响了起重机的整车稳定性,在一定程度上也改变了支腿的受力情况,因此为了更好的使用起重机和指导设计人员设计之初对这些不利因素预先考虑,本文着重探讨了不同支承情况对支腿、支腿垂直油缸受力的影响。
的。
但这些布置形式不影响本文研究结果。
因此本文选用“H ”型作为研究对象。
1.2 车架支腿系统现场使用情况由于使用环境支承面不平整,支腿及支脚盘可能存在下列情况:由于支撑球面的调整作用,支腿垂直油缸仍然只承受垂直力。
但由于支脚盘的倾斜,限制了支腿垂直油缸向一侧的滑移(图1)。
为便于说明,规定如下:如果支脚盘靠近车架对称中心一侧偏低而远离车架对称中心一侧偏高,称支脚盘向内倾斜。
反之,则称支脚盘向外倾斜。
2 ANSYS 有限元分析方法简介2.1 理论基础:《起重机设计规范》GB3811-2008等2.2 分析工具:ANSYS 13.02.3 分析过程2.3.1 确立系统坐标系(图2),规划分析对比工况(表1)2.3.2 依二维CAD 模型建立三维ANSYS 有限元模型基于有限元分析的支腿设计与使用要求Design and Application of Outrigger to Be Based onFinite Element Analysis国家工程机械质量监督检验中心 黄玉宝/HUANG Yubao摘 要:本文通过简化起重机产品实例,建立有限元模型,对比了不同地面和支腿支脚约束情况下,支腿结构和车架的变形、应力情况。
文章结尾处通过分析对比结果,对起重机支腿支脚设计和使用提出合理建议,给相关人员作为参考。
基于有限元的混凝土泵车转台结构研究与应用

:
S c i e n c e a n d T e c h n o l o g y I n n o v a t i o n H e r a l d
研 究 报 告
基 于有 限 元的混 凝 土泵 车 转 台结 构 研 究 与应 用①
江爱林’ 曾洁如 杨瞻勇’ 胡国清’ ( 1 . 三一重工股份有限公司 长沙 4 1 0 1 0 0 ; 2 . 三一重型能源特种 装备有限公司 北京
振动系数1 . 3 。 根 据 力学 知 识 及 分析 经验 , 旋转。 因此 转 台不 仅 结 构 复 杂 , 而且 工况 繁 车 型 转 台进 行 了改 进 优 化 以 降 低 重 量 , 满 工 况 , 即臂 架 全 部 水平 展 开 状 态 , 考 虑 臂架 多, 如 果 转 台结 构 设 计不合 理 , 不 仅 会 出现 足 企 业生 产 需 要。
Ab s t r a c t = Ap p l y i n g t h e F EM a n a l y s i s me t h o d a n d a d o p t i n g e n t i t y mo d e l ,i t h a s d e t a i l e d a n a l y z e d t h e s t r u c t u r e o f p u mp ma c h i n e t u r n t aቤተ መጻሕፍቲ ባይዱb l e .
JI ANG Ai L i n ’ Z E NG J i e r u YAN G Z h a n y o n g ’H U G u o q i n g ’
( 1 . S a n y L i mi t e d b y S h a r e L t d H u n a n C h a n g s h a 4 1 0 1 0 0 ; 2 . T h r e e o n e h e a v y e n e r g y s p e c i a l e q u i p me n t C o .L t d . 。B e i j i n g ,1 0 2 2 0 2 )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
向 跨 距 = 1 8rm,4个 支 腿 的 纵 向 跨 距 为 1 10 a
LB 。 13 0 A = 0 8mm, 回转 中心线 距前 支腿 的纵 向距 离 为 : o = 4 6 £ 。 3 5mm。在 该模 型 中 主要 研 究对 象
8 4
建芄 札械
类实体进 行抽取 中面并进行几何 处理 , 划分 网格 , 添
1 回转底座 .
2 接 触单元 .
3 前 支腿 ( . 第一节 )
图 4 回转 底 座 与前 支 腿 接 触 模 型
2 施 加 约 束 及 加 载
Z
混凝 土泵 车在作业 过程 中臂架有多 种姿态 ,
图 2 有 限 元模 型
本 文 只考 虑 上 车 对 下 车 的最 危 险 工况 , 即上 车臂 架 水 平 全 展 开 ,并 绕 整 车 回转 中心 旋 转 。在 上 车 臂 架 旋 转 过 程 中 ,下 车 4个 垂 直 支 腿 有 时呈 4点 支 承 状 态 , 时 呈 3点支 承 状 态 ( 有 即有 1 支腿 抬 个
■■ 雹速
菱篓{ 釜 。l - -
混凝 土泵 车 X 型支腿 下车 结构 有 限元分 析
王志 强 ,王 家军 , 王 钊
( 工集 团 徐工 机械 建设机械 分公 司 ,江 苏 徐 州 2 10 ) 徐 2 04
【 要 】 从混 凝土 泵 车整体 稳定性 角度 出发 ,利用 有 限元 前处 理工具 Hy eMeh . 产品 的三维几 摘 p r s 90对 何 模 型进行 前处理 ,并 运用 A YS求解 器对 x 型支腿 混凝 土泵 车 的下车 结构进 行 多工况 计算 分析 ,得 出 NS 其 在危 险工况下 的变形 与应力 分布云 图 ,为 x型支腿 结构 的计算 提供一 种新 的计算加 载方 式 。 【 关键词 ] 混凝土 泵车 ; 型支腿 ; X 下车 结构 ; 一面接 触 ; 限元分析 面 有 【 中图分 类号 】 U6 6 T 4 f 文献标识 码 】 B 【 文章编 号 】0 1 5 4 ( 0 1) 3 0 8 — 4 10 — 5 X 2 1 0 — 0 4 0
文献 [】 1对某混凝 土泵 车下车结构 的整体 计算进 1 行 了论 述 , 前支腿形式 为摆动伸缩式 , 其 该计 算 中存 在 如下缺 陷 : 1 ( )下车结 构模 型 中仅包 括 回转底 座 ( 该文献称 为主梁 ) 及前后支腿 , 未包 括副车架 , 在有 限元模型 中用梁单元代替副车架结构 , 这种简 化方式 与实际计算结果偏差较大 ; 2) ( 单元选择不合适 : 回 转底座与支腿均采用 sl 5固体单元 ,而 回转底座 od9 i
腿轴套端 面问 的接触 ,与实 际工况不符合 。
另 外 , 目前 发 表 的 文 献 中缺 乏 对 x 型支 腿 的
下 车结构 进行 整体分 析计算 ,尤其 是前支 腿第一 节 端 部与 回转底座 箱体 内部 的大面积 接触 问题未进行 论述 。本 文通过 定义 面一 面接触进 行仿真 模拟 ,得 到 的局 部应力 与实 际情况 相吻合 。
在对 乏维模 型处理 前 ,忽 略对结 构件强度 影响
较小 的工艺孔 、液压 及 电气安装 支架 ,然 后将 j维 模 型导 入专业 前处 理T具 H pr s9 yeMe . h 0中,对板 材
【 收稿 日期 】0 0 1 — 7 2 1 — 2 1 [ 讯 地 址 ] 志 强 ,江 苏 省 徐 州 市 金 山 桥经 济开 发 区桃 山 通 王 路 1 徐 工 建 机 泵车 研 究 所 9号
1前 支 腿 ( 二 节 ) 2 垂 直 油缸 . 第 . 4 回转 底 座 5后 支腿 . . 3前支腿 ( 一节 ) . 第
6 副 车架 .
l 计算模型的建立
11 建立几 何模型 .
图 1 几 何 模 型
1 . 有 限元前 处理及 其模型 2
将 某 型号 混 凝 土 泵 车 下 车 主要 结 构 件 在 Po r/ E环 境 下 进 行 装 配 , 如 图 1 示 。 主 要 几 何 参 所 数 :前 支 腿 横 向 跨 距 L o 90 mm, 后 支 腿 横 A= 30
【 转底 座 、前 支腿 、后 支腿 及副 车架 中的板 材 堕 J 用 S E L 1 1 元模拟 ; H L 8 单 轴套用 S LD 8 O I 15单元 ; 连 接 回转 底 座后 铰点 与后 支腿 的销 轴用 B A 18 E M 8 单 元 ; LNK 10单 元将 轴 套 与轴 连 接起 来 以保 用 I 8 证 力 的传 递 ; 直 支腿 用 L K 10单 元 模 拟 ; 垂 N I 8 用 B A 18 元将 转 台上 下铰点 与 回转底 座 上 的螺 E M 8 单 栓孔 连接 起来 ,从 而将 上车 载荷传 递 至下 车 ; 支 后 腿 摆 动油 缸 及前 支腿 伸 缩 油缸 用 L K 8 元 进 N I 10单 行仿 真 ; 回转底 座后铰 点与后 支腿 铰点 通过 轴及 连 杆进行 连接 ,同时两者 轴套接 触端 面采用 接触 单元
Fiieee n n ls nt elwe tu t r f o ceep mpwi tp tbl e nt lme t ayi o a s h o rsr cu eo n r t u t X— y esa iz r c h i
WA NG h- i g WANG J -u . Z iqa . n i j n WANG后支 腿及 副车架 ,将 下 车其
他 部 分 ( 括底 盘 、料斗 、防护 装置 、中心 泵送 系 包
统等 ) 的重量 以集 中力 的形式 加载到有 限元模 型中。
和支腿 大部 分都是 通过板 材焊 接而成 ,选用壳 单元 更加符合实际 ; 3 ( )铰点处未考虑 回转底座轴套与支
加有 限元相关 信息 ( 包括板 厚 、材料 、实常 数等 ),
形成有限元计算模型如 图 2 示 。其中材料参数 为 : 所 弹性模 量 2 ̄ P ,泊松 比 0 1 a 3,密度 7 5 g 3 8 0 / 。该 km 有 限元模型 由 82 2 节点及 8 24个单元组成 。 56 个 91