自动控制原理课件黄坚2.1
《自动控制原理》黄坚课后习题答案

=
-3
4
A2=
-3
4
A2=
+
-
4
3
+
f(t)=
e-t3
2
e-3t2
-t
e-t12
1
+
-
4
3
+
f(t)=
e-t3
2
e-3t2
-t
e-t12
1
= s=-1 [s(s+3)]2[s(s+3)-(s+2)(2s+3)]
A1(s+1)2A1=(s+1)2s
(s+1)2(s+2)s=-1A1=(s+1)2s(s+1)2(s+2)s=-1A3=(s+2)
s
(s+1)2(s+2)s=-2A3=(s+2)
s
(s+1)2(s+2)s=-2
d
ds
s
s+2
][
A2= s=-1
d
R2I1(s)
Uc(s)L1L2 L1=-R2 /LsL2=-/LCs2L3=-1/sCR1Δ1=1
L1L3=R2/LCR1s2P1=R2/LCR1s2=
R1CLs2+(R1R2C+L)s+R1+R2Ur(s)
Uc(s)
R2=
R1CLs2+(R1R2C+L)s+R1+R2Ur(s)
i2Lu1 解
u1=ui-uoi2=C
自动控制原理课件 黄坚第一章

第一节 自动控制与自动控制系统
一、自动控制的基本概念 二、控制系统的基本构成 及控制方式
第一节 自动控制与自动控制系统
一、自动控制的基本概念
自动控制: 自动控制: 自动控制示意图
给定值 被控量
在无人直接参与下, 在无人直接参与下,利用控制装制操 受控对象 控制器 纵受控对象, 纵受控对象,使受控对象的被控量按给定 信号变化。 信号变化。 检测元件 控制装置 自动控制原理的主要任务: 自动控制原理的主要任务: 自动控制系统 受控对象 。 分析和设计自动控制系统的性能。 分析和设计自动控制系统的性能
的偏差没有任何修正能力,抗干扰能力 差,控制精度不高。
二、按干扰补偿的开环控制
定义:利用干扰信号产生控制作用, 定义:利用干扰信号产生控制作用,以 及时补偿干扰对被控量的直接影响。 及时补偿干扰对被控量的直接影响。
干扰
测量
被控量
计算
执行
受控对象
特点:只能对可测干扰进行补偿,不可测干扰以及受控对象、 特点:只能对可测干扰进行补偿,不可测干扰以及受控对象、 各功能部件内部参数变化对被控量的影响,系统自身无法控 各功能部件内部参数变化对被控量的影响, 制。 适用于:存在强干扰且变化比较剧烈的场合。 适用于:存在强干扰且变化比较剧烈的场合。
流入 Q1
气动阀门 浮子 水箱 H
浮子; 浮子;
流出 Q2
•比较装置: 比较装置: 比较装置 控制器刻度盘; 控制器刻度盘; •干扰: 干扰: 干扰 水的流出量和流入量的 变化都将破坏水位保持 恒定; 恒定;
水位自动控制系统
第一节 自动控制与自动控制系统
例 水温自动控制系统 系统组成: 系统组成: 通过电机调 控制器 节阀门的开度 电机 从而调节蒸 工作原理: 工作原理 汽流入, : 汽流入,控制 加入给定信号 自动控制即没有人直接参与的控制,其基本任务是: 自动控制即没有人直接参与的控制,其基本任务是: 现没有人直接 检测实际温度 在无人直接参与情况下,只利用控制装置操纵被控对 在无人直接参与情况下, 参与的自动水 产生控制信号 使被控制量等于给定值。 象,使被控制量等于给定值。 温控制. 温控制
自动控制原理课件_黄坚第二章2
3
x3 a24 a34 4 x4
x5
回路 起点和终点在同一节点, 并与其它节点相遇仅一 前向通道 从输入节点(源)到输出节点(阱)的通道上, 通过任何
节点不多于一次的途径。如 次的通路,也就是闭合通道。
a25
x1 x3 2 x x4 2 x 3 x 1 x2 x2 x3 xx4,2x5 , x1 x x4 x5 , x2 , x2 x5
G1G2G3G4 C ( s) 1 p11 R( s ) 1 G2G3 H 2 G3G4 H 3 G1G2G3G4 H1
2013-9-29 30
例 试用梅森公式求信号流图的传递函数C(s)/R(s) .
1
解: 单独回路有四个即
L
信号流图
a
G1 G2 G3 G1G2
(3)反馈连接
• 等效变换证明推导
E(s)
C ( s) G( s)E ( s)
R(s)
B(s)
G(s) H(s)
C(s)
B( s ) C ( s ) H ( s ) E ( s ) R( s ) B ( s ) 消去中间变量 ( s ), B ( s )得 E G( s) C ( s) R( s ) 1 G( s)H ( s)
系统的动态结构图直观地反映了系统 内部各变量之间的动态关系。将复杂的动 态结构图进行化简可求出传递函数。
1.动态结构图的等效变换
等效原则:被变换部分的输入量和输出量
之间的数学关系,在变换前后保持不变。
第四节 动态结构图
(1)串联 两个环节串联的变换如图:
R(s) C(s) C(s) G (s) G11(s)G2(s) G2(s)
自动控制原理及其应用(第2版)黄坚第二章习题课
第二章习题课
(2-9)
2-9 若系统在单位阶跃输入作用时,已知初 若系统在单位阶跃输入作用时, 始条件为零的条件下系统的输出响应, 始条件为零的条件下系统的输出响应,求 系统的传递函数和脉冲响应。 系统的传递函数和脉冲响应。 -t 1 -2t R(s)= s c(t)=1-e +e r(t)=I(t) 1 - 1 + 1 = (s2+4s+2) 解: C(s)= s s+2 s+1 s(s+1)(s+2) (s2+4s+2) G(s)=C(s)/R(s)= (s+1)(s+2) (s2+4s+2) =1+ 2 - 1 脉冲响应: 脉冲响应 C(s)= (s+1)(s+2) s+2 s+1 c(t)= (t)+2e-2t-e-t δ
第二章习题课
(2) dy(t) 2 dt +y(t)=t
(2-4)
y(0)=0
第二章习题课
(2-5)
2-5 试画题图所示电路的动态结构图, 试画题图所示电路的动态结构图, c 并求传递函数。 并求传递函数。 i1 (1) 解: + R
Ur(s)
Cs _
I1(s)
+ +
i2
1
+
I(s)
R2
Uc(s)
+ i uo -
第二章习题课
(b) 解: (ui-u1) i=i1+i2 i= R
1
(2-1)
u1 L i
R1 C
+
ui
i1 i2
R2
+ uo -
《自动控制原理》黄坚课后习题答案解析word版本
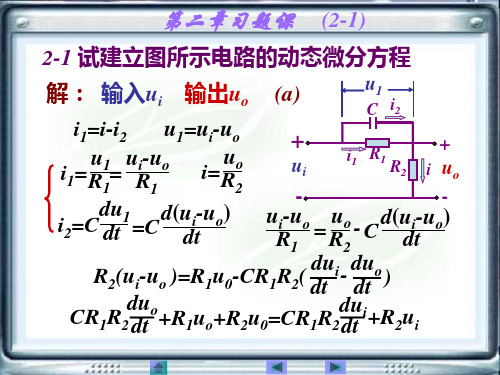
《⾃动控制原理》黄坚课后习题答案解析word版本2-1试建⽴图所⽰电路的动态微分⽅程-u o+u o解:u 1=u i -u oi 2=C du 1dt i 1=i-i 2u o i=R 2u 1i 1=R 1=u i -u oR1dtd (u i -u o )=C(a)u C d (u i -u o )dtu o -R 2=i -u o R 1i=i 1+i 2i 2=C du 1dt u o i 1=R 2u 1-u o =L R2du odtR 1i=(u i -u 1)(b)解:)-R 2(u i -u o )=R 1u 0-CR 1R 2(dui dt dt duo CR 1R 2du o dt du idt +R 1u o +R 2u 0=CR 1R 2+R 2u iu o+C R 2du 1dt o +L R 2du odtu du o dt R 1R 2L du o dt +CL R 2d 2u o dt 2=--i R 1u o R 1u oR 2+C )u o R 1R 2L du o dt ) CL R 2d 2u o dt 2=++(u i R 11R 11R 2+(C+2-2 求下列函数的拉⽒变换。
(1) f(t)=sin4t+cos4tL [sin ωt ]= ωω2+s 2=s+4s 2+16L [sin4t+cos4t ]= 4s 2+16s s 2+16+s ω2+s 2L [cos ωt ]=解:(2) f(t)=t 3+e 4t解:L [t 3+e 4t ]= 3!s 41s-4+6s+24+s 4s 4(s+4)=(3) f(t)=t n e atL [t n e at ]=n!(s-a)n+1解:(4) f(t)=(t-1)2e 2tL [(t-1)2e 2t ]=e -(s-2)2(s-2)3解:2-3求下列函数的拉⽒反变换。
A 1=(s+2)s+1(s+2)(s+3)s=-2=-1=2f(t)=2e -3t -e -2t(1) F(s)=s+1(s+2)(s+3)解:A 2=(s+3)s+1(s+2)(s+3)s=-3F(s)= 2s+31s+2-= A 1s+2s+3+ A 2(2) F(s)=s (s+1)2(s+2)f(t)=-2e -2t -te -t +2e -t解:= A 2s+1s+2+ A 3+A 1(s+1)2A 1=(s+1)2s (s+1)2(s+2)s=-1A 3=(s+2)s (s+1)2(s+2)s=-2d ds s s+2][A 2= s=-1=-1=2=-2(3) F(s)=2s 2-5s+1s(s 2+1)F(s)(s 2+1)s=+j =A 1s+A 2s=+jA 2=-5A 3=F(s)s s=0f(t)=1+cost-5sint解:= s + A 3s 2+1A 1s+A 2=12s s 2-5s+1=A 1s+A2 s=j s=jj -2-5j+1=jA 1+A 2-5j-1=-A 1+jA 2A 1=1F(s)= 1s s 2+1s -5s 2+1++(4) F(s)=s+2s(s+1)2(s+3)解:=+s+1A 1s+3A 2(s+1)2+s A 3+A 4-12A 1= 23A 3= 112A 4= A 2= d [s=-1ds ](s+2)s(s+3) -34= -34A 2= +-43+f(t)=e -t 32e -3t 2-t e -t 121= s=-1 [s(s+3)]2[s(s+3)-(s+2)(2s+3)](2-4)求解下列微分⽅程。
《自动控制原理》课件

集成化:智能控制技术将更加集 成化,能够实现多种控制技术的 融合和应用。
添加标题
添加标题
添加标题
添加标题
网络化:智能控制技术将更加网 络化,能够实现远程控制和信息 共享。
绿色化:智能控制技术将更加绿 色化,能够实现节能减排和环保 要求。
控制系统的网络化与信息化融合
网络化控制:通过互联网实现远程控制和监控
现代控制理论设计方法
状态空间法:通过建立状态空间模型,进行系统分析和设计 频率响应法:通过分析系统的频率响应特性,进行系统分析和设计 极点配置法:通过配置系统的极点,进行系统分析和设计 线性矩阵不等式法:通过求解线性矩阵不等式,进行系统分析和设计
最优控制理论设计方法
基本概念:最优控制、状态方程、控制方程等 设计步骤:建立模型、求解最优控制问题、设计控制器等 控制策略:线性二次型最优控制、非线性最优控制等 应用领域:航空航天、机器人、汽车电子等
动态性能指标
稳定性:系统在受到扰动后能否恢复到平衡状态 快速性:系统在受到扰动后恢复到平衡状态的速度 准确性:系统在受到扰动后恢复到平衡状态的精度 稳定性:系统在受到扰动后能否保持稳定状态
抗干扰性能指标
稳定性:系统在受到干扰后能够 恢复到原来的状态
准确性:系统在受到干扰后能够 保持原有的精度和准确性
信息化控制:利用大数据、云计算等技术实现智能化控制
融合趋势:网络化与信息化的融合将成为未来控制系统的发展方向 应用领域:工业自动化、智能家居、智能交通等领域都将受益于网络化与 信息化的融合
控制系统的模块化与集成化发展
模块化:将复杂的控制系统分解为多个模块,每个模块负责特定的功能,便于设计和维护 集成化:将多个模块集成为一个整体,提高系统的性能和可靠性 发展趋势:模块化和集成化是未来控制系统发展的重要方向 应用领域:广泛应用于工业自动化、智能家居、智能交通等领域
自动控制原理黄坚
自动控制原理黄坚一、引言自动控制原理是现代科学技术中一门重要的学科,主要涉及电气工程、控制工程、自动化技术等方面。
本文将介绍自动控制原理的基本概念、原理及其在实际应用中的重要性。
二、基本概念1. 控制系统控制系统是指由各种组件组成的系统,用于实现对某个物理过程或设备的控制。
它主要包括被控对象、传感器、执行器和控制器等组件。
2. 反馈控制反馈控制是一种常见的控制方式,在该控制方式下,控制器将被控对象的输出与给定的目标值进行比较,然后根据比较结果调整控制信号,以使输出接近目标值。
3. 开环控制开环控制是指控制器仅根据给定的输入信号来生成控制信号,而没有进行输出与目标值的比较。
它的主要缺点是对于被控对象的扰动和非线性响应比较敏感。
三、自动控制原理自动控制原理是通过对控制系统的建模和分析,推导出控制系统的数学模型,并利用数学方法进行分析和综合,以实现对被控对象的精确控制。
1. 控制系统的数学模型控制系统的数学模型是指对控制系统进行数学描述的方程或函数。
常见的数学模型包括微分方程、差分方程和传递函数等。
通过建立准确的数学模型,可以进行对控制系统的分析和设计。
2. 控制系统的性能指标控制系统的性能指标是用来衡量控制系统性能好坏的指标,常见的性能指标包括稳态误差、响应速度、超调量和稳定裕度等。
3. 控制系统的设计方法控制系统的设计方法主要包括传统控制方法和现代控制方法。
传统控制方法主要包括比例-积分-微分(PID)控制和根轨迹法等,而现代控制方法主要包括状态空间法和优化控制等。
四、自动控制原理在实际应用中的重要性自动控制原理在现代社会中的应用非常广泛,涉及到生产制造、交通运输、能源管理、环境保护等诸多领域。
1. 生产制造在生产制造领域,自动控制系统可以实现对生产过程的精确控制,提高产品质量和生产效率。
例如,在汽车工厂中,自动控制系统可以实现对装配线的控制,从而提高生产效率和产品质量。
2. 交通运输在交通运输领域,自动控制系统可以实现对交通流量的调控,实现交通拥堵的缓解。
自动控制原理及其应用
• 开环控制:控制装置与受控对象之间只有顺向作用 而无反向联系。其特点:系统结构和控制过程均很 简单,但抗扰能力差、控制精度不高。 • 闭环控制:控制装置与受控对象之间,不但有顺向 作用,而且还有反相联系,即有被控量对控制过程 的影响。闭环控制又称为反馈控制或按偏差控制。 其特点:能减小或消除作用在前向通道上所引起的 被控量的偏差值。具有较高的控制精度和较强的抗 扰能力。 • 前向通道:给定值至被控量的通道。 • 反馈通道:被控量至系统输入端的通道。 • 复合控制:前馈补偿控制和反馈控制相结合。基本 形式:按输入前馈补偿的复合控制和按扰动前馈补 偿的复合控制 。
第二节 自动控制系统的分类
• 一、线性系统和非线性系统
• 由线性微分方程或线性差分方程所描述的系统称为线性系统;由非线性方程所描述的系统称 为非线性系统。
从系统的数学模型来看,若系统方程的系数不是时间变量的函数则称此类系统为定常系统, 否则称为时变系统。 从系统中的信号来看,若所有的信号都是时间的连续函数即模拟量,则称此类系统为连续系 统。若系统中有一处或多处信号为时间的离散函数,如脉冲或数码信号,则称之为离散系统。 若系统的给定值为一定值,而控制任务就是克服扰动,使被控量保持恒值,此类系统称为恒 值系统。 若系统给定值按照事先不知道的时间函数变化,并要求被控量跟随给定值变化,则此类系统 称为随动系统。 若系统的给定值按照一定的时间函数变化,并要求被控量随之变化,则称此类系统为程序控 制系统。
• 该控制系统的工作原理:水箱中流入的为冷水,热蒸汽经阀门并流经 热传导器件,通过热传导作用将冷水加热,加热后的水流出水箱。热 蒸汽经冷却后也变成水由排水口排出。热敏元件将检测到的水温值转 换成一定形式的物理量之后,反馈给控制器,控制器将给定温度值与 检测到的实际温度值比较后,发出控制信号,调节阀门的开度,从而 调节蒸汽流量,直至世纪水温与给定值相符为止。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一节 控制系统的微分方程
系统微分方程由输出量各阶导数和输 入量各阶导数以及系统的一些参数构成。
系统微分方程的一般表达式为:
a0
dnc(t) dtn
+
a1
dn-1c(t) dt n-1
r(t) =δ(t),c(tc)(=0)e=–ct's(i0n) t= 0
第一节 控制系统的微分(t)
0 r(t) c(t)
t
返回
=
f
dy(t) dt
d2y(t) a = dt2
消除中间变量得:
m d2y(t) dt2
+f
dy(t) + ky(t) = F(t)
dt
3. 水位自动控制系统
第一节 控制系统的微分方程
3.水位自动控制系统
根第据一物章料里平已衡经关介系绍了工作原理: qAi0d—[流h的d0入+t流h箱(量t)体]=[qi0+qi(qti)—]-流流[q入量o0+箱增q体量o(t)] q故平o0衡—流时的出:流箱A量d体dht(t)q=i0q=i(qtqo)o-0—q流o流(t量)出增箱量体
2. 系统的本质特征与建模的目的密切相关.建模目的不 同,系统的输入输出及结构就不同,本质信息也不同,模型自 然也不同。
3. 模型的的精度与所考虑影响系统的因素有关,一般来 说考虑的因素越多,模型越精确,当然也越复杂(工程实用性 变差)。
4. 需正确处理好模型准确性与实用性(简化性)的矛盾,应 紧紧围绕建模的目的做文章 。
• 系统的数学模型是描述系统输入、输出 实变验量法以:及对内系统部或各元变件量输之入间一关定形系式的的数信学号表 (阶达跃式信。号,单位脉冲信号,正弦信号等)根据 系统–或建元立件数的学输出模响型应的,方经法过分数为据处: 解理析而辨法识和出实 系统的验数法学模型。
二、关于数学模型的几点说明
1. 模型是系统内部本质信息的反映,这说明它不是实际 过程的重现,并未考虑过程所有因素,而只是抓住主要的本 质的因素。
数学模型: 是描述系统特性或状态的数学表达式。它表达
了系统输入输出及系统各变量之间的定量关系。是 系统内部本质信息的反映。是系统内在客观规律的 写照或缩影。(举例:电路模型)
解析法:依据系统及元件各变量之间所遵循的
物• 理分,析化和学设定计律列任写何出一变个量控间制的系数学统表,达首式要,任并 实验务验是证建。立系统的数学模型。
三、建模的目的
1. 可以定量分析系统动静态性能,看是否能满足生 产工艺要求。 2. 可以用于定量的控制计算,对系统行为进行预测, 并加以控制。控制精度与模型精度有关。 3. 利用模型可以进行有关参数的寻优 。
三、建模的目的
1. 可以定量分析系统动静态性能,看是否能满足生 产工艺要求。 2. 可以用于定量的控制计算,对系统行为进行预测, 并加以控制。控制精度与模型精度有关。 3. 利用模型可以进行有关参数的寻优 。
第二章 自动控制系统的数学模型
第一节 控制系统的微分方程
一、建立微分方程的一般步骤 二、常见环节和系统的微分
方程的建立 三、 线性微分方程式的求解
第一节 控制系统的微分方程
一、 建立系统微分方程的一般步骤
(2)一个建系立统初通始常微是分由方一程些组环。节连接而成 的根,据将系各统环中节的所每遵个循环的节基的本微物分理方规程律求,出分 来 别列,写便出可相求应出的整微个分系方统程的,微并分构方成程微。分方 程组。 (列3)写消系除统中微间分变方量程,的将一式般子步标骤准:化。 边(将,1)与与确输输定出入系量量统有有的关关输的的入项项变写写量在在和等方输号程出的式变左等量边号。。右
第一节 控制系统的微分方程
2.机械位移系统
系统组成:
F(t)
质量 m 弹簧系数k 阻尼系数f
输入量 F(t) 输出量 y(t) f
k M y(t)
初始微分方程组: 根据牛顿第二定律 F = ma
F(t) –FB(t) – FK(t) = ma
中间变量关系式:
FK(t) = k y(t)
FB(t)
第二章 自动控制系统的数学模型
第二章自动控制系统的数学模型
第一节 控制系统的微分方程 第二节 数学模型的线性化 第三节 传递函数 第四节 动态结构图 第五节 反馈控制系统的传递函数
本章重点
• 数学模型(时域数学模型、传递函数、 动态结构图、信号流图)建立的一般 方法;
• 数学模型之间的转换。
一、数学模型的概念
+
··· +
an-1
dc(t) dt
+
anc(t)
=
b0
dmr(t) dtm
+
b1
dm-1r(t) dtm-1
+···+
bm-1
dr(t) dt
+bmr(t)
第一节 控制系统的微分方程
三、线性微分方程式的求解
解:用一将个方例程子两来边求说拉明氏采变用换拉得氏:变换法 解线性s定2C常(s)微+ 分2s方C(程s) +的2方C(法s)。= R(s) 例 已知系统的R微(s分) =方1程式,求系统的 求拉氏C反输dd2(cst变出2)(t=)换响+s得2应2 +:。dd21cts(t+) 2+=2(cs+(t1)1)=2 +r(1t)
第一节 控制系统的微分方程
二、常见环节和系统微分方程的建立
1. RC电路
(2) 建立初始微 分方程组
ur= Ri + uc
i=C
duc dt
(3)消除中间变量,
使式子标准化
R
+
+
i
ur
C uc
-
-
(R1C)量dd确ut和c定输+输u出入c=量ur
RC电输路入是量一:阶ur常系 数线输性出微量分:方u程c 。