汽车测试系统的研究与实现
无人驾驶汽车的软件系统开发与测试方法

无人驾驶汽车的软件系统开发与测试方法随着科技的不断进步和智能化的发展,无人驾驶汽车作为一项具有前瞻性和革命性的创新技术,正逐渐成为现实。
无人驾驶汽车的实现离不开先进的软件系统开发和严格的测试方法。
本文将重点探讨无人驾驶汽车软件系统的开发和测试方法。
一、无人驾驶汽车软件系统开发方法1.需求分析在无人驾驶汽车软件系统的开发过程中,首先需要进行需求分析。
这一步骤的重点是确定系统所需实现的功能和性能,包括自动驾驶的各个模块、传感器与控制系统之间的交互等。
开发团队应与相关专家和工程师进行深入的讨论和调研,以确保准确理解客户需求和行业要求。
2.架构设计在需求分析的基础上,开发团队将进行无人驾驶汽车软件系统的架构设计。
这一步骤涉及到确定系统的组织结构、模块划分、数据流和控制流等,以确保系统的可靠性、高效性和可扩展性。
同时,考虑到无人驾驶汽车的安全性和稳定性,架构设计还应考虑系统的容错能力和纠错机制。
3.编码实现在架构设计完成后,开发团队将开始进行编码实现。
根据系统的需求和设计,团队成员将负责相应的模块开发和代码编写。
此过程需要注意编码规范、模块的接口设计和代码的可读性,以便于后续的维护和升级。
同时,开发团队也应采用版本控制和代码审查等工具,确保代码的质量和稳定性。
4.集成与测试在编码实现完成后,开发团队将进行系统的集成与测试。
这一过程旨在验证各个模块之间的交互是否正确,系统是否正常运行。
开发团队可采用自动化测试和手动测试相结合的方式,对系统进行全面的功能测试、性能测试和安全性测试。
同时,还应定期进行系统的回归测试,确保系统在不同环境下的稳定性和一致性。
二、无人驾驶汽车软件系统测试方法1.单元测试单元测试是对软件系统中的各个模块进行独立测试的过程。
在无人驾驶汽车软件系统开发中,开发团队应编写测试用例,对每个模块的功能进行测试和验证。
单元测试的目标是发现模块的功能缺陷和错误,以便及早进行修复和调试。
2.集成测试集成测试是对系统不同模块之间的交互进行测试的过程。
VBOX汽车整车性能测试系统
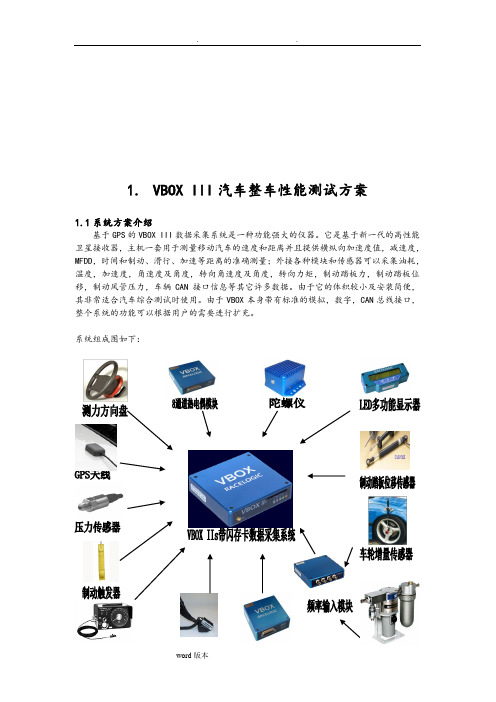
1.VBOX III汽车整车性能测试方案1.1 系统方案介绍基于GPS的VBOX III数据采集系统是一种功能强大的仪器。
它是基于新一代的高性能卫星接收器,主机一套用于测量移动汽车的速度和距离并且提供横纵向加速度值,减速度,MFDD,时间和制动、滑行、加速等距离的准确测量;外接各种模块和传感器可以采集油耗,温度,加速度,角速度及角度,转向角速度及角度,转向力矩,制动踏板力,制动踏板位移,制动风管压力,车辆CAN接口信息等其它许多数据。
由于它的体积较小及安装简便,其非常适合汽车综合测试时使用。
由于VBOX本身带有标准的模拟,数字,CAN总线接口,整个系统的功能可以根据用户的需要进行扩充。
系统组成图如下:以上第二——十九项为可选项1.3特点:•全套测量系统体积极小,安装简便迅速•能完成国家标准要求的汽车动力性,经济性,操纵稳定性,制动性能等实验•在线显示4个测量参数•各种测量或采集到的参数可以实时显示•可根据要求设定各种不同的试验条件进行试验•制动触发形式多样,使试验更加方便•WINDOWS操作界面的设定和分析软件,使用方便•高精度、高可靠性,高耐振、抗冲击性能确保测试质量•用GPS非接触式速度和距离测量•现场即时打印功能,打印各个测量或采集到的参数,实现现场数据阅读•大容量紧凑式闪存卡(CF卡)即时存储数据,以便后处理•可扩展连接其他各种传感器•绘制轨迹图,圈数定时1.4 可进行的试验:•滑行试验•油耗试验•爬陡坡试验•最高车速试验•加速性能试验•制动性能试验•操纵稳定性试验•最小稳定车速试验•最小转弯直径测量实验•制动踏板力测量实验•制动踏板行程测量实验•制动管路压力测量实验•汽车防抱制动系统性能实验•温度测量实验•里程,速度表校验等其它试验1.5 可满足的国家标准:GB/T 12545 - 1990 汽车燃料消耗量GB/T 12547 - 1990 最低稳定车速GB/T 12536 - 1990 汽车滑行试验GB/T 12543 - 1990 汽车加速性能GB/T 12539 - 1990 汽车爬坡性能GB/T 12544 - 1990 汽车最高车速GB/T 12676 - 1999 汽车制动系统性能GB/T 6323 - 94 汽车操纵稳定性试验方法GB/T 12540 - 90 汽车最小转弯直径测定方法GB/T 13594 - 92 汽车防抱制动系统性能要求和试验方法1.6 应用实例图片:VBOX II在测试世界(芬兰)的应用:2. 关于Racelogic 公司VBOX产品概述GPS 技术在1995年就已经面世但是知道最近才足够精确用于车辆测试(见GPS的概述)。
汽车制动性能检测系统的设计与分析

该检测系统主要 由机械和电气两部分组成。 机 械部分主要包括双板式称重 台和单轴反力式滚筒 制动试验台, 电气部分采用工业 计算机测控系统 , 是本文介绍的重点. 制动力检测采用的制动试验台 由框架 、 驱动装置 、 滚筒装置、 举升装置、 测量装置、 控制装置等组成 , 中滚筒的圆周表面覆盖一定厚 其
维普资讯
第 2 卷 第 5期 6 2 0 年 1 月 06 O
西 安 工 业 大 学 学 报
J OURNAL ’ OF XIAN TECHNOLOGI CAL UNI VERS TY I
V0. 6 No 5 1 2 .
输出( 、 电平 ) 高 低 状态发生 改变 , 从而 给计算机一 个可靠的开始和结束检测信号.
A
提示信息和制动力检测值及判断结果 , 并通过网络 将结果传送给上位计算机.
工 ‘— 灯 阵
开 关
__■ ■■■ ■■■_。■ 。■■一
量输 _ ^
入 卡
lD E
Oc.2 0 t 06
文章编号 : 10—742 0)54 5 4 005 1 (0 60—3— 0
汽车春 霞
( 西安工业大学 机 电工程学院 , 西安 7 0 3 ) 1 0 2
摘 要 : 介绍一种汽车制动性能检测 系统的结构及工作原理 , 并对制动性能测试方法和测试 结果进行 了分析研 究. 结果表明, 由于受到轴荷、 滚筒夹角及滚筒表面附着系数等因素的影响,
况很相似, 使测试结果更接近实 际情况, 平板式 但 制动试验台对传感器 、 检定工具 、 测试方法等有较 严格的要求 , 使得造价升高 、 测试难度增加. 本文介 绍的这种汽车制动性 能检测系统采用反力 式滚筒
汽车 EPS 试验台的设计及试验研究

汽车 EPS 试验台的设计及试验研究随着汽车行业的不断发展,其安全性越来越得到广泛的关注,电动助力转向系统(EPS)作为安全的重要保障,日益得到广泛的应用。
为了确保EPS在汽车中的稳定性和可靠性,在其研发和设计阶段需要进行严谨的试验和研究。
因此,本文设计了一种汽车EPS试验台,并进行了试验研究,旨在为EPS的研发提供可靠的基础数据。
一、汽车EPS试验台设计1.试验框架结构设计试验框架结构主要由试验用台架、试验悬挂系统、EPS测试系统组成。
台架为I型钢焊接而成,尺寸为1500mm*1500mm*1500mm。
试验悬挂系统采用四柱式气动拉杆,并配备防震圆片。
EPS测试系统由EPS测试台、EPS调制电源、电压表组成。
2.试验系统设计EPS测试台由测试工位,操纵机构,转向轮和传感器等组成。
测试工位上设有反力装置,可减小EPS系统的负荷。
操纵机构采用机械操纵和电子操纵两种方式,能够通过转向轮对EPS 进行控制。
传感器采用离子钠级别的压电传感器和光学传感器,可对试验数据进行采集和处理。
EPS调制电源主要是对EPS系统进行电气测试时所采用的电源,可承受EPS测试过程中的高电压电流。
电压表主要用于测试EPS系统的电压。
二、试验研究为了检测EPS系统在不同环境中的性能表现,我们针对EPS 的转弯力矩、电机功率、功率因数、噪音和振动等参数进行了试验研究。
1.转弯力矩试验通过对EPS系统进行不同强度的转弯,比较输出力矩,得到EPS的转弯力矩曲线。
测试结果表明,EPS的转弯力矩主要受到转弯角度和EPS系统的真实负载等因素的影响,实验数据可用于优化EPS转向系统的控制算法。
2.电机功率试验在不同的速度下,对EPS系统功率进行试验研究,掌握其转向过程中的功率消耗情况。
实验结果表明,EPS的运行效率受到不同运行状态、动力负载以及环境温度的影响,功率消耗也存在明显差异。
3.功率因数试验在不同电压下,对EPS系统的功率因数进行试验研究。
纯电动汽车动力总成试验技术研究与测控系统开发

本文以LABVIEW和PLC为程序设计核心,设计了测控系统的上位机 与下位机控制程序。利用OPC技术,实现了上位机与下位机的通 讯,在软件中编程以实现变频器、测功机的通讯和精确控制功能; 基于LABVIEW分析软件主要设计流程,绘制了操作主界面,利用并 行线程执行循环技术,完成了上位机程序主要功能的模块化设计。
纯电动汽车动力总成试验技术研究与 测控系统开发
纯电动汽车驱动电机与变速器集成的新型动力总成系统机械连 接紧密,具有功率密度高、调速范围广等特点。作为动力传动系 统的重要组成部分,它通过驱动电机调速与变速器换挡点的调节, 优化动力系统的功率输出,满足纯电动汽车的加速、减速、爬坡、 制动等多种行驶状态,其性能参数、控制精度对于整个车辆的动 力性、经济性、舒适性有着至关重要的影响。
通过以上软件程序的设计,实现相关技术的应用。本文依据动力 总成系统组成及指标测试需求,设计测控系统的试验,包括高效 工作区、最高工作转速、峰值转速、最高效率、转矩控制精度、 温升等。
经过以上试验结果,证明设计的试验平台测控系统可以测试纯电 动汽车动力总成系统的性能,具有较好的可靠性,对试验数据的 结果分析,验证了该评价方法的可行性。
ቤተ መጻሕፍቲ ባይዱ
在关键零部件的开发过程中,建立试验平台对动力总成系统的精 准测控显得举足轻重,缩短了动力总成系统的研发周期、降低了 开发测试风险。本文参考传统动力传动系统评价方法,以驱动电 机与变速器集成的新型动力总成系统为研究对象,提出了一种针 对其驱动性能的评价方法。
本文在评价方法的设计分析中,利用层次分析法,选取对动力驱 动系统有较大影响的峰值功率温升、额定功率下最高工作效率、 传动比密度、高效率区间率、转矩控制精度、最大工作转速与 峰值转矩七个评价指标,确定各指标的对应权重,建立针对该类 型总成的评价公式,以此对其性能进行计分评价。本文以试验技 术方法为基础,根据评价体系指标的需求,对该新型驱动总成试 验平台测控系统进行了需求分析和整体规划等细致的研究,详细 阐述了试验平台机械系统结构与电气测试与控制系统,设计了试 验平台的硬件结构及连接,分析了测控系统的主要控制方式,将 电气测控系统分为实时控制、现场通讯及数据采集详细说明,确 定了转速、转矩、电压、电流等参数的采集方式,并根据主要硬
车载测试技术的前沿进展与应用案例

车载测试技术的前沿进展与应用案例在当今科技快速发展的时代,车载测试技术成为了汽车行业不可或缺的一环。
它不仅能够对汽车性能进行全面的评估和测试,还能提供准确的数据和信息,为汽车制造商和消费者提供决策依据。
本文将对车载测试技术的前沿进展与应用案例进行探讨。
一、车载测试技术的前沿进展车载测试技术的前沿进展主要体现在以下几个方面:传感器技术、数据处理与存储技术、通信技术以及人工智能技术。
传感器技术是车载测试技术的基础和核心。
随着科技的不断发展,传感器技术得到了巨大的突破和改进。
如今,车载测试中使用的传感器种类繁多,包括温度传感器、压力传感器、加速度传感器等。
这些传感器能够实时感知和测量车辆的各种参数,为后续的数据处理和分析提供必要的信息。
数据处理与存储技术是车载测试技术的关键环节。
随着车载测试数据的不断增加和复杂性的提高,传统的数据处理与存储方法已经无法满足需求。
因此,研究人员提出了各种新的数据处理和存储方法。
例如,采用分布式计算和存储技术,可以有效地处理大规模的车载测试数据,并提供高效的数据访问和查询。
通信技术在车载测试技术中起到了至关重要的作用。
车载测试需要将获取的数据实时传输到相应的终端设备进行处理和分析。
因此,可靠和高效的通信技术非常必要。
目前,车载测试中采用的通信技术主要包括无线通信技术和卫星通信技术。
无线通信技术可以提供便捷的数据传输,而卫星通信技术可以覆盖更广范围的地域。
人工智能技术是车载测试技术的新兴领域。
通过人工智能技术,车载测试可以实现自动化和智能化。
例如,利用机器学习算法,可以实现车载测试数据的自动分析和识别。
此外,人工智能技术还可以应用于车辆的故障诊断和预测,提高车辆的可靠性和安全性。
二、车载测试技术的应用案例车载测试技术在实际应用中取得了显著的成果,并为汽车制造商和消费者带来了巨大的利益。
以下是几个车载测试技术应用的案例:1. 燃油经济性测试随着全球对环境保护意识的提高,燃油经济性成为购车时的重要考量因素。
汽车PEPS测试系统的设计及其可靠性研究
汽车PEPS测试系统的设计及其可靠性研究作者:樊云石来源:《汽车博览·科研上旬刊》2019年第01期摘要:随着汽车技术的不断进步以及对汽车的需求不断增强,尤其是中国对汽车的需求量在不断的增加,人们对汽车的各种功能和舒适性的要求不断提高,汽车的各种电子模块也在不断的更新和发展,因此,汽车的系统也在逐渐的更新和完善。
汽车PEPS系统就是近年来在国内逐渐兴起和发展的汽车进入和启动系统。
汽车的安全性对汽车尤为重要,因此,汽车PEPS测试系统的研究也显得尤为重要。
近年来随着汽车电子技术迅猛发展,汽车无钥匙进入和启动(Passive Entry Passive Start)系统同样得到了广泛的应用,PEPS系统作为整个汽车电子技术的核心之一,在汽车技术不断迅速发展技术背景下,对其诊断测试系统提出了更高的要求,在汽车测试诊断过程中PEPS系统需要和汽车内部其他电子系统进行大量的数据信息交流的同时构建出一个完整的系统用来模拟汽车电子单元的其他系统,在测试过程中测试方式过于复杂,汽车电子单元的异常模拟复杂度较高,都在一定程度上限制了PEPS诊断系统的应用与拓展。
本课题利用虚拟仪器对汽车PEPS系统进行模拟和仿真测试,开发汽车PEPS系统的测试仿真环境,为虚拟汽车电子系统测试系统提供了一个可靠的平台,该系统具有极大的灵活性。
因而相应的汽车系统及功能的测试也变的越来越复杂。
1. 汽车PEPS系统及其测试系统的发展现状随着汽车的普及,人们对汽车性能的要求也越来越高,同时对舒适性和智能化要求也日益汽增加。
无钥匙进入、启动系统作为舒适性和智能化的重要部分,在国外中高档车型上取得的巨大成功也激励了国内研发此系统。
同时,因国内各主机厂队无钥匙进入、启动系统的青睐,使得系统供应商对无钥匙进入和启动系统充满信心,从而加大研发投入,研发周期也相应缩短。
系统供应商在设计前期充分调研个主机厂的需求后,设计出符合各主机厂的无钥匙进入和启动系统平台,从而将高昂的研发费用得以分摊,因此,中、低档车型也相继出现无钥匙进入和启动系统当中。
《车辆振动与噪声测试系统软件开发与应用》范文

《车辆振动与噪声测试系统软件开发与应用》篇一一、引言随着汽车工业的快速发展,车辆振动与噪声问题逐渐成为消费者关注的重点。
为了满足市场对高品质汽车的需求,车辆振动与噪声测试系统的研发与应用显得尤为重要。
本文将详细介绍车辆振动与噪声测试系统的软件开发及其在实际应用中的效果。
二、车辆振动与噪声测试系统概述车辆振动与噪声测试系统主要用于对汽车在行驶过程中产生的振动与噪声进行测试与分析。
该系统通常包括传感器、数据采集设备、分析软件及报告输出等部分。
通过该系统,可以准确获取车辆振动与噪声数据,为汽车设计和改进提供有力支持。
三、软件开发1. 需求分析:在软件开发初期,需对系统功能进行详细的需求分析。
根据实际需求,确定系统应具备的测试功能、数据分析功能、报告生成功能等。
同时,还需考虑系统的易用性、稳定性和可扩展性。
2. 系统设计:根据需求分析结果,进行系统设计。
设计包括数据库设计、软件架构设计、界面设计等。
数据库需具备高效的数据存储和检索能力;软件架构应采用模块化设计,便于后期维护和扩展;界面设计应简洁明了,方便用户操作。
3. 编程实现:根据系统设计,进行编程实现。
编程语言通常采用C++、Java等。
在编程过程中,需确保代码的可读性、可维护性和可扩展性。
同时,还需对程序进行严格的测试,确保程序的正确性和稳定性。
4. 软件开发工具与环境:在软件开发过程中,需使用到多种工具和环境。
如集成开发环境(IDE)用于编程和调试;数据库管理系统(DBMS)用于数据存储和检索;版本控制系统(VCS)用于代码管理和协作等。
四、应用1. 测试流程:车辆振动与噪声测试系统的应用流程主要包括传感器布置、数据采集、数据分析、报告生成等步骤。
首先,根据测试需求,在车辆上布置传感器;然后,通过数据采集设备获取振动与噪声数据;接着,利用分析软件对数据进行处理和分析;最后,生成报告,为汽车设计和改进提供依据。
2. 应用效果:车辆振动与噪声测试系统的应用可以有效提高汽车品质和舒适性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图1测试系统结构图
Fig.1 Testing system structure
田
万方数据
2014(刀
3.3测试流程设计下线检测界面
用户管理界面 系统配置界面 数据管理界面
统进行初始化,进入下线检测界面,开始汽车故障 诊断。检测流程为 (1)采用Window认证方式启动检测程序; (2)待测汽车进入检测工位,然后输入引车 员号: (3)检测系统扫描汽车的VIN码,根据VIN调
IS015765协议是在CAN总线上实现了
CAN),
KWP2000.它把KWP2000应用层的服务移植到 CAN总线。参照ISO/OSI模型,它分为4层:物理层、 数据链路层、网络层、应用层。链路层采用了 IS011898—1协议嘲.该协议是对CAN2.0B协议的进 一步标准化;应用层采用了IS015765—3协议【6】, 该协议完全兼容基于K线的应用层协议14230—3. 并加入了CAN总线诊断功能组:网络层则采用 IS015765—2协议【71,规定了网络层协议数据单元 (N—PDU)与底层CAN数据帧以及上层KWP2000 服务之间的映射关系,并且为长报文的多包数 据传输过程提供了同步控制、顺序控制、流控制 和错误恢复功能。IS015765的体系结构如图2
of the Car factory,but it is expensive,poor in generality
diagnosis
the
fault diagnosis
exists
a
instrument
and inconvenient
carry.Although there
cheap domestic equipment,but its poor of the detection of Car
unit(ECU)
控制器、传感器和执行器等电子器件被越来越 多地运用到汽车上,得益于近年来汽车电子的飞速
收稿日期:2014—02—25;修订日期:2014—03—05
发展。由于消费者对车辆的可靠性、安全性、舒适性 的不断追求,使得汽车电控系统变得越来越复杂,
基金项目:国家自然科学基金项目(61263013);桂林电子科技大学研究生教育创新计划资助项目(xjye2012024) 作者简介:莫太平(1974一),男,副教授,硕士生导师,研究方向为智能控制与模式识别、嵌入式系统及现场总线;蔡习文 (1987一),男,硕士研究生,研究方向为企业信息化系统;张明志(1988一),男,硕士研究生,研究方向为嵌入式系统。
其中.下线检测模块主要是实现汽车ECU的检 测,并将结果保存至数据库。用户管理模块是实现 用户的增加、删除,秘密的变更,权限的修改。系统 配置模块主要是在下线检测前,对系统的配置,包 括标准值的输入和修改,VIN和ECU的对应关系, 还有底层USB—CAN的比特率的设置。数据管理模 块实现数据的查询和统计功能。还有其他功能,如 打印支持,在需要打印的时候,发挥作用。
包括网络管理、网络定时、应用层定时等详细内容,
使得该协议的适用性和可操作性更强.而且兼容
IS014230应用层的服务和参数。 本文就是在IS015765的基础上,研究和设计
了汽车下线管理系统,该系统通过与待测汽车通
信,读取电控系统的故障码和数据流,来判断下线 汽车的电子器件(包括传感器和执行器)是否正常, 如果不正常,需要进行调整维修.这样能够保证汽 车的质量。最后还要打印测试结果并保存至数据 库,便于以后的跟踪和维护。
3.2
USB—CAN通讯设计 上位机通过调用USB—CAN提供的DLL动态链
接库函数,可实现与底层通信,完全不需要理解CAN
帧在CAN总线上的传输机制。调用VCI—OpenDevice ()打开设备;连接设备成功后,调用VCI_InitCan()初 始化CAN相关参数;上一步完毕之后,通过VCI_Start CAN()启动CAN转换功能,下线检测系统即可与 CAN总线进行数据的发送和接收。在接收来自总线 上的数据时,利用VCI_Receive()获取接收缓冲区中
关键词:IS015765;CAN总线;故障码;数据流;ECU 中图分类号:TP273 文献标志码:A
Design and
Implementation
of Automotive ECU Testing System
MO Tai—pin91,CAI Xi—wen2,ZHANG Ming—zhil (1.School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China;
2.School of Computer Science and Abstract:Automotive popular,80 the trouble electronics
Engineering,Guilin
widely
on
University of Electronic
Technology,Guilin 541004,China)
-一+一一一一彳一一
物理层
IS01 198-1
图2
Fig.2
lS015765体系结构图
IS01 5765 architecture diagram
3上位机软件设计
3.1功能模块设计 根据需求,可设计出4个功能模块:下线检测 模块、系统配置模块、用户管理模块、数据管理模 块。模块如图3所示。
Automation&Instrumentation
上 I下线检测模块
l诊断程序
r≮≤孓≤溯
上 工
用户管理模块 系统配置模块
上
数据管理模块
l数据访问程序l
一
打印支持
图3功能模块图
Fig.3 Functional module
diagram
出VSN及相应的数据流标准: (4)引车员将检测系统的接口接人车辆诊断接口; (5)持续检测水温,直到水温合格。由于ECU中 可能存在一些软故障。这些软故障并不一定是硬件 系统本身的问题,而可能是由于历史的原因而存 在。所以在水温合格后,要首先清除ECU的故障码, 而后读取的故障码就可以代表ECU电控系统的硬 故障。这些数据可以表明当前的电控系统是否存在 问题: (6)开始诊断,在界面上显示故障码和数据流, 并存储数据至后台数据库: (7)检测完成后,检测系统综合所有信息得出 结论,若检测过程中没有故障码出现,且检测到的 参数值均在合格的范围内,则该辆汽车合格,否则 为不合格,不合格要返回检修。最后还要自动打印 检测结果: (8)检测系统进入下一辆车的检测流程。 检测流程图如图5所示。
自动化s仪表2014(7>
田
万方数据
造成了车内线束剧增和诊断难度不断加大【11。为此 CAN总线应运而生,成为最受欢迎的现场总线之 一,代表汽车车载网络的主流发展方向。由于它具 有成本低、可靠性高、抗干扰能力和实时性强等优 点[zl,被汽车制造商越来越多地应用于汽车控制、诊 断和通信f3l。因此基于CAN总线的故障诊断越来越 重要。为解决故障诊断系统独立于CAN网络.造成 系统成本增加和内部网络变得复杂等问题,欧洲汽 车厂商推出一种基于CAN总线的诊断系统通信标 准IS015765,它以IS014229—1定义的服务为基础. 规范了基于CAN总线的诊断服务(UDS
been
Car.The
testing result demonstrated the Bus;diagnosis
practicality and reliability of the system.
Key words:IS015765;CAN
trouble code(1YrC);data
stream;electronic control
a
and data streams ing诵tll
ECUs
to
determine whether automotive electronic control
a
system is in
a
normal state facilitate
through
further
eommunicat—
in
ear.At
the
1............._J‘...................................J I............._J
-一+一一一一彳一一
IS014229一I(UDS) 应用层
ISOl5765—3
-一+一一一一彳一一
网络层
IS015765—2
-一+一一一一彳一一・
数据链路层
1S01 1898一l
文章编号:1001-9944(2014)07-0035—04
汽车ECU测试系统的研究与实现
莫太平1,蔡习文2,张明志1
(1.桂林电子科技大学电子工程与自动化学院,桂林541004;2.桂林电子科技大学计算机科学与工程学院,
桂林541004)
摘要:汽车电子在汽车上应用越来越广泛。CAN总线越来越受欢迎。因此基于CAN总线的 汽车故障诊断显得越来越重要。传统的故障诊断方法是采用汽车原厂的故障诊断仪,但是 它价格昂贵、通用性差。虽然市面上有价格便宜的国产设备.但是处理能力和存储容量有 限,不能满足汽车下线电控检测要求。为了在汽车下线前,对其电控系统进行检测以确保 汽车的质量,设计和实现了汽车下线检测系统,该系统实现了基于C_AjXl总线的诊断标准 IS015765,通过与汽车内部的ECU进行通信,读取故障码和数据流来判断汽车电控系统是 否处于正常状态,并将结果存入SQL/R.tfi库。便于以后的分析和维护。最后该系统进行了实 车测试,测试结果表明该系统的实用性。
1
测试系统结构
根据诊断设备和不同层次结构车载网络的接