同济大学 汽车 系统仿真 根轨迹作业
汽车平顺性时域仿真分析

C 计算时采用高度非线性分析 , . 包含了结构 的非线性 因素 、 材料的非线性以及轮胎与路面接触
特性等。
时域 仿 真 技 术 的 关 键 在 于 建 立 合 理 的路 面 激 励 和时 间模 型及 实现 时域 内振 动 响应 快 速求 解 。本 文 采 用 C E新 技 术— — 虚 拟试 验 场 技 术对 汽车 平 A
价以及改进等方面。但该方法对于多自由度的复杂
模型求解计算 量大 、 效率 低 , 且不 能表示 出各 自由
度 响 应 随 时 间 的 变 化 关 系 及 预 测 系 统 运 行 一 段 时 间后 的振 动情 况 , 法 考虑 系统 的非线 性 。 无 在 时 间域 内进 行 汽 车 行 驶 平 顺 性 研 究 的优 势 为 : 间域 内 的方程 通 过 各种 数F M模型 、 . A E 悬架系
统( 弹簧 、 减振器 、 动力控制臂 )转 向梯形 、 轮轮 、 车 胎 等 整车 非 线性 系统 模 型 , 这样 各 个 系统 间难 以 明 确确定的作用力关系均可以包含在分析模型之内。 b 以整车为分析对象 , . 边界条件只有路 面和 车速 , 这为计算提供 了分析载荷实现规范化 、 准 标
Ke r s Ve il, d o f r, m e d m an sm ua in Vit a r vn r u d y wo d  ̄ h ce础 e c m o t Ti - o i i lt , r u lp o i g g o n o
1 前言
目前 , 汽 车 行驶 平顺 性 的仿 真研 究 主 要在 频 对 域 内进 行 ,主要 应用 于 汽 车行 驶 平 顺 性 的预 测 、 评
2 虚拟试验场 技术
虚拟试 验场技术 是 以整车系统为分析对象 , 同时考虑系统各类非线性 的计算机仿真技术 , 其对 整 车进 行 动 力学 分 析 时 以标 准 路 面 和车 速 为负 荷 , 因而可在产品设计前期实现“ 整车道路性能预测 ” 。
驾驶仿真模型实验验证及参数初步标定

可以得到这样的结论 :人口 处线形危险度与加速度成一
定的关系, 即人口 线形危险度越大( 线形越差) , 其加速度 参考 文献 :
绝对值越大 , 即车速变化越大 , 行车越不安全 。 同样 ,出 口线 形危 险度 与加速度也成类 似的 关系 , 即出 口线形危险度越大 ( 线形越差 )其 加速 度值越 大 , , 即 车速变化越大 , 行车越 不安全。
No we i Ro d n es n e i g n Un eg o n S a e r ga n a Tu n l Tu n l n a d d r r u d p c . l
T cn lg.0 0V lmes e1 (. eh oo y2 0) ou ( u) 51 ( i : ) s
[ 郭忠印等, 3 】 公路隧道进出口运行安全研究一 中期报告 , 一 同
1 前言
来 表 示 。 与 实 际 道 路 模 型 有 所 不 同 , 且 不 能 适 用 这 并
因此 , 要 根 据道 路 的特 征 提 出适 需 郭孔辉院士在研究人一 车闭环系统时提出了最优 多变 的道路 线 形 , 曲率模 型 。 并在 汽 车性 能 仿真 实验 中得 到很好 应 用[ 用于实际道路输入 的驾驶员一 汽车闭环仿真模型。 I ] 。 由于模 型 中 的道 路 模 型 一 般 用 直 线 和抛 物 线 的连 接
理论的 完整性和可靠性需要实践的检验。通过实验 ,
可以获取发现模 型的不足以及模 型参数 的取值范 围及其 敏感性 。 从而加深对模型的认识 , 评价模型的适用 范围。为
驶时, 其运行轨迹存在着一定的规律性, 车辆在进入弯 此。 即: 笔者在 1 0 4国道新昌段进行了实验, 以检验模型的正 道是总是朝内侧偏移 , 出弯道时 , 而驶 其轨迹朝外侧偏移。 确性和适用性。 () 2仿真模型的前视时间和行车速度对最大偏移距离 14 0 国道为国家干线公路, 在浙江新昌段的道路技术 有着很大的影响, 前视时间越大, 其最大偏移值也越大, 行 等级为山区 二级公路, 设计车速为 4 /。临近的上三  ̄m h
同济大学_汽车学院_汽车振动_郭荣_chapter2_作业答案

⎛ ⎜⎜⎝
k1k2
4(k1 + k2 )
⎞ ⎟⎟⎠
x2
Ue
=
1 2
ke x2
可得: ke
=
k1k2
4(k1 + k2
)
于是
f= 1 4π
k1k2
(k1 + k2 ) m
2.4 求图示系统的等效刚度。
解: ① 力和力矩分析
⎧ ⎨ ⎩
F1 + F2 = F1a = F2b
F
可得:
→
⎧⎨k1 ⎩ k1
x1 + k2 x2 = x1a = k2 x2b
(a + b)2 k1k2
F
→
F
=
(a + b)2 k1k2
a2k1 + b2k2
x
等效刚度为:
ke
=
(a + b)2 k1k2
a2k1 + b2k2
2.5 设有一均质等截面简支梁如图。在中间有一集中质量 m。如把梁本身质量 M 考虑在内,试计算此系统的等效质量。假定梁在自由振动时的动挠度曲线和简支 梁中间有集中静载荷作用下的静挠度曲线一样。
⎛ ⎜⎝
系统作微振动 sin θ
≈
θ;
1− cosθ
≈
1θ2 2
⎞ ⎟⎠
解:
(1)求总势能
( ) a:U = 1 k (a sinθ )2 + mgl(1 − cosθ ) ≈ 1 ka2 + mgl θ 2
2
2
b:U = 1 k (a sinθ )2 ≈ 1 ka2θ 2
2
2
( ) c:U = 1 k (a sinθ )2 − mgl(1 − cosθ ) ≈ 1 ka2 − mgl θ 2
全自动泊车系统的路径跟随
主题 词 : 全 自动 泊车
路径 跟随
T i me — s c a l i n g 微分 平坦
中图分类 号 : U 4 6 3 。 6 文献标 识 码 : A 文章编 号 : 1 0 0 0 — 3 7 0 3 ( 2 0 1 3 ) 1 0 — 0 0 2 6 — 0 4
【 Ab s t r a c t ] A f o l l o w i n g s t r a t e y g o f a f u l l y - a u t o ma t i c p a r k i n g a s s i s t s y s t e m c o mp i r s i n g l a t e r a l a n d l o n g i t u d i n a l m o t i o n
模块 . 把 非 线 性 车 辆模 型 反 馈 线 性 化 . 通 过 极 点 配 置 实 现 了 对 车 辆 行 驶 轨迹 的 闭环 控 制 。搭 建 了双 闭 环 纵 向 运 动 控 制模块 , 外 环 对 车 辆 的行 驶 距 离 进 行 控制 , 内 环对 车辆 的纵 向车 速进 行 控 制 。实 车试 验 结 果 表 明 , 该 控 制策 略能 把 跟
1 自动 泊 车 系统 概 述
典 型 的 自动泊 车系 统 由感 知模块 、路 径规 划模
器. 并 利用 李 亚普诺 夫 直 接法 证 明 了控 制器 的稳 定 性. 但 是在 控制 器 中侧 向控制 和 纵 向控 制具 有 耦 合 关 系 .不适 用 于 车 速 信 号 具 有 强烈 噪声 微 分 平 坦 理 论 的 侧 向运 动 控 制器 . 但 未 涉 及纵 向运 动控 制[ 2 1 。C h e n等 设 计 了模 糊 P I D侧 向运 动 控制 器 和模 糊 P I 纵 向运 动 控 制器 . 但模 糊 逻辑 的整定 较 困难[ 3 1 。 宋 金泽 提 出了一
基于ANFIS的高速公路车辆跟驰模型与仿真

F e wa a -olwi g Mo e n i lt n r e y C rf l o n d l a d S mua i o Ba e sd o n A a tv d p ie Ne r -u z u of z y
I frn eS se n ee c y tm
( 同济大学 道路与交通工程教育部重点实验室 , 上海 2 10 ) 0 8 4
摘要 : 了更 好地 描述 高速公路上驾驶员在车辆跟驰过程中 为 表现出来 的模糊 、 确定性 的行为特 征 , 不 采用 自适应 模糊 神
经网络 A F S N I 来建立 车辆 跟驰模 型 . 首先 , 通过 小波分 析方 法, 对采集到的跟车数据进行 降噪 , 除外界 因素 的干扰 , 消 从
速度差 、 车头间距和后 车速度作 为输 入 , 以及 后车加 速度作 为单输 出的 自适应 模糊神 经 网络跟车 模型 . 最终 , 该模 型 对
f e w y st a o re a iu t n.
Ke wo d : c rf l w n mo e ; a p v n u o f z y r s a -o li g o dl a i d te e r -u y z i f r n e s s m ;wa e e e o sn n e e c y t e v ltd n ii g;r c o i a i e t nt me
s e d f o l wi g v h ce a i p t a d c r f l wi g P e o f l o n e i l s n u s n a - l n oo a c l r t n a e o t u . i al t e mo e h tg n r t d c e a i s t u p t F n l h d lt a e e a e e o h y, h a tv r l o d i e s a -o li g e a ir t e d pi e u e f rv r ’ C rf l w n b h v o wa a o s
在线实时智能车路仿真系统研究

S i ig HIBa — n ,YANG a — u n y Xi o g a g
(T eerhC ne Tnj U i r t,hnh i 0 0 2 C i ) ISR sac et , og n esy Sag a 20 9 , hn r i v i a
A s a tT es utr o nl era—m eil i r t c r i ert n V I ytm,h nt n o bt c: h t c e fao -n eli evhce n a r t e n ga o ( I)ss r r u i t —fs u u t i e t f c o f eu i
部署 、 调度 亦耗 费 巨大 , 过实 地部署 进行 实验评 价会 通 有很 大 的限制 。
VI 地 实 验 需 要 大 量 配 备 车 载 单 元 ( B o I实 O U,n badui 的车辆 , 文献 提 出了利用 仿 真进行 VI or nt ) 有 I系 统 运行研 究 的框 架 J 对 V I , I 系统 运 行 指 标 进 行 评 价
分析。但仿真系统大多是离线的 , 现场系统与仿真系 统 之 间缺 乏实 时信 息 流动 , 真 模 型 的建 立 和 运 行建 仿 立在 采集 数据 的统计 分 析 基 础 上 , 没有 从 现 场 系统 而 获得 实时 数据来 驱 动仿 真 同步 运行 , 真 评 价 效果 难 仿 以保证真实可靠性 , 只能对系统运行进行定性 的和概 括性 的评价 。笔者 在 以往研 究 的基 础 上 , 出在线 实 提
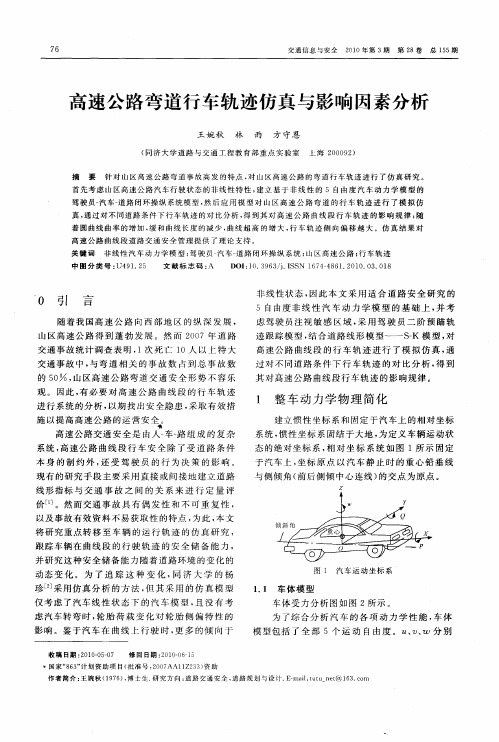
高速公路弯道行车轨迹仿真与影响因素分析
并研究 这种安 全储备 能力 随着道路 环境 的变化 的 动态 变 化 。为 了追 踪 这 种 变 化 , 济 大 学 的 杨 同
图 1 汽 车运 动 坐 标 系
珍_ 采用仿 真分 析 的方 法 , 2 但其 采 用 的仿 真模 型
7 6
交 通 信息 与安 全
21 0 0年第 3期
第 2 8卷
总 15期 5
高 速 公路 弯 道 行 车轨 迹 仿真 与 影 响 因素分析
王婉秋 林 雨 方 守 恩
( 同济 大 学 道 路 与 交 通 工程 教育 部 重 点 实 验 室 上 海 2 0 9 ) 0 0 2
摘
要
针 对 山 区高 速 公 路 弯 道 事故 高发 的特 点 , 山 区高 速 公 路 的 弯 道 行 车 轨迹 进 行 了仿 真研 究 。 对
其 对高速公路 曲线 段行 车轨迹 的影 响规律 。
1 整 车 动 力 学 物理 简 化
建 立 惯 性 坐 标 系 和 固定 于 汽 车 上 的 相 对 坐 标 系 统 , 性 坐 标 系 固结 于 大 地 , 定 义 车 辆 运 动 状 惯 为
施 以提高 高速公路 的运 营安全 。 高速公路 交通 安全 是 由人一 路 组 成 的复 杂 车~
高 速 公 路 弯 道 行 车 轨 迹 仿 真 与 影 响 因 素 分 析 —— 王 婉 秋 林 雨 方 守恩
仅考 虑 了汽 车线 性状 态 下 的 汽车 模 型 , 没有 考 且 虑汽 车转弯 时 , 胎 荷载 变 化对 轮 胎 侧 偏 特性 的 轮 影响 。鉴于 汽车 在 曲线 上 行驶 时 , 多 的倾 向于 更
收 稿 日期 : 0 00 — 7 2 1—50 修 回 日期 : 0 0O 2 1 一 6 1 5
第十七讲汽车操纵稳定性试验

侧倾刚度
方法:车身固定,保持左右轮负荷之和恒定的条件下, 使左右轮交互上下移动,由左右轮负荷变化算出侧倾扭矩, 由左右轮位移求得侧倾角,两者之比为侧倾刚度。 车轮定位──测定车轮外倾角、前束、主销后倾角、 轮距等 方法:使用专门的车轮定位仪。 车轮定位参数影响转向特性、越线响应特性、直线行驶 特性(自动回正)和方向盘操纵力。
2.
转弯性能试验
a.稳态横摆响应试验(稳态圆周行驶试验)
目的:主要用于定量测定不足转向、中性转向或过多 转向。 测量参数: 横摆角速度;横向加速度;纵向车速;方 向盘转角(与力矩) ;侧倾角;质心侧偏角。 试验方法:
• 圆周半径恒定,分级提高车速,作匀速圆周行驶DIN/ISO4138, • 方向盘转角恒定,分级提高车速作匀速行驶,显然R会改变。 • 横向加速度恒定,分级提高车速,作匀速行驶,调整方向盘转 角ESV。
评价方法:
汽车横摆角速度随时间变化曲线应落在规定的区域内; 松开方向盘2秒后,80Km/h时 4 ° /s , 0 。 40Km/h时,
同济大学汽车实验室
操纵稳定性道路试验
同济大学汽车实验室
操纵稳定性道路试验
同济大学汽车实验室
操纵稳定性道路试验
4.转向操纵力试验
a.静态转向操纵力试验 反映停车、入库时的操纵力情况 b.低速转向操纵力试验 用双纽线进行转向轻便性试验 c. 蛇形穿杆试验
2. 惯性矩测定 方法:用两根钢丝绳将汽 车吊起,测定其回转摆动 周期T,算出惯性矩。具体 如下 围绕z轴的惯性矩
T 2 r1 r2W Jz 4 2 h
T2 h 围绕x轴的惯性矩 J x ( 4 2 g ) hW
T2 h 围绕y轴的惯性矩 J y ( 2 ) hW g 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
根轨迹作业
一.书上习题
4.4以T=5为例做出开环函数的根轨迹如下:
由图示可知
(a),k>0时系统可能稳定也可能不稳定,如图当0<k<0.44(读图所得)的时候根在虚轴左侧稳定,k>0.44的时候不稳定
(b),如图示,两个
(c),K<0,系统一定是不稳定的,这个结论可以从劳斯判据得到
4.7
(1)a=[0.2,1,100]x=roots(a) 解得 x =
-2.5000 +22.2205i
-2.5000 -22.2205i
系统极点都在虚轴左侧稳定
(2)clc clear
a=[0.2 1] b=[0.8 1]c=conv(a,b)d=[c,100]x=roots(d)解得x =
-10.9194
2.3347 + 7.1963i
2.3347 - 7.1963i
有两个根在虚轴右侧不稳定
(1)
q=zpk([-1+i,-1-i],[0,0,-5,-7,i,-i],8)
pzmap(q)
从图和zpk模式看出有两个虚数根上,不稳定
(2)
q=tf([100,100],[conv(conv([0.2,1],[0.5,1]),[0.8,1]),0]) pzmap(q))
稳定
4.9
q=tf([1,25],[conv([1,13.2,173.5],[1,11.8,345]),0]) rlocus(q)
(2)
q=tf(1,[conv([1,1,2],[0.8,1]),0])
rlocus(q)
二.ppt习题
1.
(1)
转换为参数根的标准形式为
-1=as/(s2+11)绘出根轨迹如下图
(2)
由图可知当阻尼比ζ=0.457,a=3.03的时候,超调量为19.9%,为保证超调量小于20% 则a的下限取3.03
wn=11;
zunibi=0.457:0.001:1;
tr=(3.14-acos(zunibi))./(wn*sqrt(1-zunibi.^2));
for i=1:544
if (tr(i)>1.5)
zunibi2=zunibi(i)
break;
end
end
a=2*zunibi2*wn
得zunibi2 = 0.8540 a = 5.6648
所以a取值范围为3.03~5.66
2.
用Simulink仿真
示波器1的图形如下
可知ess(t)=1
3.通过求取特征根来判断稳定
(1)a=[1,1],b=[2,1],c=conv(a,b),d=[c,4,1]roots(d) ans =
-1.7670
0.2615 + 1.0184i
0.2615 - 1.0184i
-0.2559
可知G1不稳定
(2)roots([1,0,101])
ans =
0 +10.0499i
0 -10.0499i
G2有两个虚极点,临界稳定
(3)
a=[1,1],b=[1,1],c=conv(a,b),d=[c,1]
roots(d)
ans =
-1.7549
-0.1226 + 0.7449i
-0.1226 - 0.7449i
G3的根均在虚轴左侧,稳定
(4)
a=[0.005,1],b=[0.001,1],c=conv(a,b),d=[c,0,0] e=conv([0.2,1],[0.025,1])
f=[0 0 e]
roots(d+f)
ans =
1.0e+02 *
-9.9880
-2.0098
-0.0011 + 0.0099i
-0.0011 - 0.0099i
G4的根均在虚轴左侧,稳定
4.
Simulink仿真如下
Scope2图形即为所求。