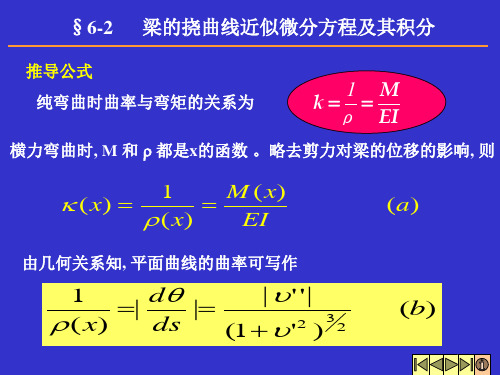
梁的挠曲线近似微分方程及其积分.
合集下载
梁的挠度及转角(1)
A2= mL/6EI B2= - mL/3EI
yc2 = mL2/16EI
力的分解法----各横截面的位移或转角等 于每项荷载独立作用时在同位置产生的挠 度和转角代数和。
A= A1+ A2= FL2/16EI + mL/6EI
B= B1+ B2= - FL2/16EI - mL/3EI
yc= yc1 + yc2 = FL3/48EI +mL2/16EI
2)M(x)是连续函数。
3)梁的变形是在线弹性小变形范围内。
4)
0
x
5.EXANPEL y
例5-1:求悬臂梁B截面的转角和B截面挠度, 设 :梁长为L,EI = 常数 。
Ax
F ①求约束反力 YA=F mA= FL
x
B ②列弯矩方程 M(x)=Fx-FL
③列挠曲线近似微分方程
yM (x)F(Lx) EI EI
1. 叠加原理的适用范围 2.叠加原理
1)力的分解法-2)梁的分段法--
1. 叠加原理的适用范围
在材料的线弹性范围内,梁的小变形且纵向变形忽略不计的条件下,梁的 挠度和转角与作用在梁上的荷载成线性关系.
2.叠加原理—
1)梁在几项荷载同时作用下某一横截面 的挠度和转角,可等于每一项荷载单独作 用下该截面的挠度和转角的叠加.
1.弯曲变形的弊与利 2.挠曲线(deflection curve) 3.挠度和转角方程(equation of deflection and slope) 4.弯曲位移的符号规则
1.弯曲变形的弊与利
Fp
Fp
q
2Fp
❖❖❖使利设结用计构变成的形弯使的曲用物形功理以能条达受件到到求减影弯震象曲,,静减严不少重定动时问载会题荷破。。坏。
yc2 = mL2/16EI
力的分解法----各横截面的位移或转角等 于每项荷载独立作用时在同位置产生的挠 度和转角代数和。
A= A1+ A2= FL2/16EI + mL/6EI
B= B1+ B2= - FL2/16EI - mL/3EI
yc= yc1 + yc2 = FL3/48EI +mL2/16EI
2)M(x)是连续函数。
3)梁的变形是在线弹性小变形范围内。
4)
0
x
5.EXANPEL y
例5-1:求悬臂梁B截面的转角和B截面挠度, 设 :梁长为L,EI = 常数 。
Ax
F ①求约束反力 YA=F mA= FL
x
B ②列弯矩方程 M(x)=Fx-FL
③列挠曲线近似微分方程
yM (x)F(Lx) EI EI
1. 叠加原理的适用范围 2.叠加原理
1)力的分解法-2)梁的分段法--
1. 叠加原理的适用范围
在材料的线弹性范围内,梁的小变形且纵向变形忽略不计的条件下,梁的 挠度和转角与作用在梁上的荷载成线性关系.
2.叠加原理—
1)梁在几项荷载同时作用下某一横截面 的挠度和转角,可等于每一项荷载单独作 用下该截面的挠度和转角的叠加.
1.弯曲变形的弊与利 2.挠曲线(deflection curve) 3.挠度和转角方程(equation of deflection and slope) 4.弯曲位移的符号规则
1.弯曲变形的弊与利
Fp
Fp
q
2Fp
❖❖❖使利设结用计构变成的形弯使的曲用物形功理以能条达受件到到求减影弯震象曲,,静减严不少重定动时问载会题荷破。。坏。
梁的变形,挠曲线微分方程及其积分

1
w1
Fb 6lEI
l2 b2 3x2
w1
Fbx 6lEI
l2 b2 x2
CB段 (a x l)
2
w2
Fb 6lEI
(l 2
b2
3x2 )
3l b
x
a
2
w2
Fb 6lEI
(l 2
b2
x2)x
l b
x
a
3
2.求最大挠度和最大转角
将 x = 0 和 x = l 分别代入转 角方程左右两支座处截面的 转角
46
EIw ql x3 q x4 Cx D — (2) 12 24
边界条件为
x 0, wA 0 x l, wB 0
max
A
B
ql 3 24EI
wmax
w x l 2
5ql 4 384EI
例 如图示的简支梁,抗弯刚度为EI,集中载荷F,求 w(x)、θ(x)及wmax、θmax。
对各段梁,都是由坐标原点到所研究截面之间的 梁段上的外力来写弯矩方程的。所以后一段梁的 弯矩方程包含前一段梁的弯矩方程。只增加了 (x-a)的项。
对(x-a)的项作积分时,应该将(x-a)项作为 积分变量,从而简化了确定积分常数的工作。
梁中点处的挠度为
w x l 2
Fbl 2 16EI
0.0625 Fbl 2 EI
结论: 在简支梁中, 不论它受什么荷载作用, 只要挠曲 线上无拐点, 其最大挠度值都可用梁跨中点处的挠度 值来代替, 其精确度是能满足工程要求的.
EI 抗弯刚度---表征梁抵抗弯曲变形的能力。
用积分法计算梁变形时应遵循的两个规则
解:1.求挠曲线方程和转 角方程
积分法求梁的位移

EI
2. 取w’0
x
M
y
M<0 w″<0
x
M
y
M>0 w″>0
M x w
EI
M x w
EI
EIw M x
EIw M xd x C EIw [ M xd x]d x Cx D
例:弯曲刚度为EI的悬臂梁如图,求梁的挠曲线方程
及其最大挠度wmax。
q
解: x截面处弯矩方程为:
0
A
x
AD段: 1
w1
Fb 2lEI
1 3
l2 b2
x
2
Fbx
w1 6lEI
l2 b2 x2
DB段:2 w2
Fb 2lEI
l b
x
a2
1 3
l2 b2
x
2
w2
Fb 6lEI
l b
x
a
3
l2
b2
x
x
3
A y
l/2 Ⅰ
A
x1 a
F
C
DⅡ
wC
wmax
B
b
B x
当载荷作用在梁的中点,即a=b=l/2时,其最大转 角和挠度为:
x A
F
D
B
x
a
b
l y
解: 1)求弯矩方程
AD段:M1x
Fb l
x
DB段:M2 x
Fb l
x
Fx
a
2)梁的挠曲线方程
AD段:EIw1
M1x
F
b l
x
DB段:EIw2
M
2
x
F
b l
x
Fx
2. 取w’0
x
M
y
M<0 w″<0
x
M
y
M>0 w″>0
M x w
EI
M x w
EI
EIw M x
EIw M xd x C EIw [ M xd x]d x Cx D
例:弯曲刚度为EI的悬臂梁如图,求梁的挠曲线方程
及其最大挠度wmax。
q
解: x截面处弯矩方程为:
0
A
x
AD段: 1
w1
Fb 2lEI
1 3
l2 b2
x
2
Fbx
w1 6lEI
l2 b2 x2
DB段:2 w2
Fb 2lEI
l b
x
a2
1 3
l2 b2
x
2
w2
Fb 6lEI
l b
x
a
3
l2
b2
x
x
3
A y
l/2 Ⅰ
A
x1 a
F
C
DⅡ
wC
wmax
B
b
B x
当载荷作用在梁的中点,即a=b=l/2时,其最大转 角和挠度为:
x A
F
D
B
x
a
b
l y
解: 1)求弯矩方程
AD段:M1x
Fb l
x
DB段:M2 x
Fb l
x
Fx
a
2)梁的挠曲线方程
AD段:EIw1
M1x
F
b l
x
DB段:EIw2
M
2
x
F
b l
x
Fx
《材料力学》讲义5-2梁挠曲线近似微分方程及积分ppt课件

A
EI z
aB L
y 连续条件
Me
x
C
共有四个积分常数 边界条件
x0
xaL
A 0 A 0 C 0
xaB1 B2EI 2Fb 6Lx3
1 6
Fx
a3
C2 x
D2
x a 1Da1 D22 a 1aC1C22a
6FEELbI2FIzaZLb32Ca1L3C1aCC2F1Lb2 D6FxL1b26FL2FLb3L12b6FLFa16Lb22Fax3bL122aF162aFa3aFaCba22L6L23LC0bC2 22a D2
d 2
dx 2
M (x) EI Z
o
xo
x
M
M
d2y dx 2
0
M
M
d2y dx 2
0
y
y
d 2
dx 2
M (x) EI Z
梁挠曲线近似微分方程
d 2
dx 2
M (x) EI Z
A
C
Bx
C y
d
dx
B
M (x) EI Z
dx
C1
tan d
dx
M (x) EI Z
在小变形情况下,任一截面的转角等于挠曲线在该截
EI z 2
x
A
L2
B
L2
C
y
挠曲线方程应分两段AB,BC.
共有四个积分常数
边界条件
x0
连续条件
A 0 A 0
x L 2
B1 B2 B1 B2
例题 5.5
用积分法求图示各梁挠曲线方程时,试问在列各梁的挠曲线近似微分 方程时应分几段;将分别出现几个积分常数,并写出其确定积分常数的边 界条件
§6-2梁的挠曲线近似微分方程及其积分(精)
大挠度fmax和最大转角max。
解: 由对称性可知梁的两个支反力为
RA
q
RB
ql RA RB 2
A
B
x
y
l
例题 6 -2 图
此梁的弯矩方程及挠曲线微分方程分别为
ql 1 2 q M ( x) x qx (lx x 2 ) 2 2 2 q 2 EI ' ' M ( x) (lx x ) 2
EI ' ' M ( x) Pl Px (2)
例题 6-1 图
对挠曲线近似微分方程进行积分, 得
Px 2 EI ' Plx C1 (3) 2 Plx 2 Px 3 EI C1 x C 2 (4) 2 6
边界条件为 :
x
A
l x
B x
x 0, 0 x 0, ' 0
EIυ [ M ( x )dx ]dx C1x C2
得
C1 EI '| x 0 EI 0 C2 EI 0
式中,θ 0 和 v0 分别代表坐标原点处截面的转角和挠度。
例题6-3 图示一抗弯刚度为EI的简支梁, 在D点处受一集中 力P的作用。试求此梁的挠曲线方程和转角方程,并求其最大 挠度和最大转角。
两段梁的挠曲线方程分别为
1 挠曲线方程 转角方程 挠度方程
( 0 «x «a)
2
( a«x « l )
b " P x EIv1 M1 l
b EIv2 " M 2 P x P( x a) l
3 θA ql θ max θB 24 EI
x
q
材料力学 积分法求梁的变形
一、挠曲线近似微分方程
M ( x ) = r EI Z 1
1 = ± r d 2 w dx 2 d w é 2 ù 1 + ( ) ê ú dx ë û
3
±
d 2 w dx 2 d w 2 ù é 1 + ( ) ú ê dx û ë
3
M ( x ) = EI Z
边界条件、连续条件应用举例
弯矩图分三段,共6 个积分常数需6个边界条 件和连续条件 A B
P C D
w
铰连接
ω A点: A = 0, q A = 0
B 点 : w B 左 = w B 右
C点 : w C左 = w C右
D点:w D = 0
q C 左 = q C 右
边界条件、连续条件应用举例
y
边界条件
3 qL C1 = 6 EI z
EI zw =
1 (L - x )4 + C q 1 x + C 2 24
x = 0 x = 0 x = L
q = 0 w = 0
qL3 q B = 6 EI z
q =-
3 qL C2 =24 EI z
挠曲线方程应分两段AB,BC.
F A
a
q
B
EI z
L
共有四个积分常数
C
x
边界条件
x = a x = a + L
连续条件
w B = 0 wC = 0
y
x = a
w B1 = w B 2 q B1 = q B 2
例题 5.4 &
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
M ( x ) = r EI Z 1
1 = ± r d 2 w dx 2 d w é 2 ù 1 + ( ) ê ú dx ë û
3
±
d 2 w dx 2 d w 2 ù é 1 + ( ) ú ê dx û ë
3
M ( x ) = EI Z
边界条件、连续条件应用举例
弯矩图分三段,共6 个积分常数需6个边界条 件和连续条件 A B
P C D
w
铰连接
ω A点: A = 0, q A = 0
B 点 : w B 左 = w B 右
C点 : w C左 = w C右
D点:w D = 0
q C 左 = q C 右
边界条件、连续条件应用举例
y
边界条件
3 qL C1 = 6 EI z
EI zw =
1 (L - x )4 + C q 1 x + C 2 24
x = 0 x = 0 x = L
q = 0 w = 0
qL3 q B = 6 EI z
q =-
3 qL C2 =24 EI z
挠曲线方程应分两段AB,BC.
F A
a
q
B
EI z
L
共有四个积分常数
C
x
边界条件
x = a x = a + L
连续条件
w B = 0 wC = 0
y
x = a
w B1 = w B 2 q B1 = q B 2
例题 5.4 &
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
梁的弯曲-变形刚度计算
一、梁的变形度量——挠度与转角
x
1 1'
F
A
C
B
x
y
C'
y
1'
1
Байду номын сангаас
y f ( x)
——挠曲线方程
一、梁的变形度量——挠度与转角
x
1 1'
F
A
C
B
x
y
1'
y
C'
1
在小变形下: 即:
dy y tan dx
——转角方程
任一横截面的转角 = 挠曲线在该截面形心处切线的斜率
2
9 ql 2 128
M max
1 2 M A ql 8
例 14 试作图示超静定梁的剪力图和弯矩图。
q
5.讨论 设MA为多余约束力 列变形几何方程
A Aq AM 0
A
A l
B 原结构
q MA A B 静定基
查表
Aq
ql M Al , AM A 24 EI 3 EI
5Fl 3 Fl 2 Fl 3 l 6 EI 3 EI 2 EI
F A l C l
Me B
yBM
A F A C B
e
BM
B
e
Me
BF
yBF
3. Me和F共同作用时
2 M e l Fl 2 B BM e BF EI 2 EI 2 M e l 2 5Fl 3 y B y BM e y BF EI 6 EI
2.确定积分常数
FBy=
l
Me l
由 y x 0 0, D 0
梁的挠曲线近似微分方程

由边界条件:
x 0,yA 0 ; D 0
xl,
yB 0 ;
C ql3 24
q
A
x θA
θB
y
l
B
x
EIy ql x3 q x4 Cx D 12 24
EIy ql x2 q x3 ql3 4 6 24
q (l3 6lx2 4x3)
ql x3 q x4 ql3 x 12 24 24
24EI
最大转角和最大挠度分别为:
y qx (l3 2lx2 x3) 24EI
ymax
y
x l 2
5ql 4 384EI
max
A
B
ql3 24 EI
外伸梁,承受集中载荷作用,试绘制挠曲线的大致形状图。 设弯矩刚度EI为常数。
§6-3 用积分法求梁的变形
解:1、绘制挠曲线的基本依据
1 y M (x)
(x)
EI z
根据弯矩的正、负、零值点或零值区,确定挠曲线的凹、
凸、拐点或直线区。
在梁的被约束处,应满足位移边界条件;在分段处,则 应满足位移连续条件。
载荷作用。试求此梁的转角方程和挠度方程,并确定最大转角
和最大挠度。
y
q
解:
FRA
FRB
ql 2
A
B
x
M(x) ql x q x2 22
x
l
EIy ql x q x2 22
EIy ql x2 q x3 C 46
EIy ql x3 q x4 Cx D 12 24
§6-3 用积分法求梁的变形
§6-3 用积分法求梁的变形
梁的挠曲线近似微分方程:
d 2 y M (x) dx2 EI
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EIf
1 2
P(
L
x)2
C1
EIf
(0)
1 6
PL3
C2
0
EIf
1 6
P(L
x)3
C1 x
C2
EI
(0)
EIf
(0)
1 2
PL2
C1
0
C1
1 2
PL2
; C2
1 6
PL3
L
P
x
f 写出弹性曲线方程并画出曲线
f ( x) P (L x)3 3L2 x L3 6EI
最大挠度及最大转角
max
虚梁对应方程: M (x) q(x)
:令: q( x) -M(x) 依此建立虚梁上的分布载荷。
EIf ( x) M (x) :虚梁“力”微分方程的积分
M (x) q(x)
x
Q( x) M (x) 0 q(x)dx Q0
xx
M ( x) 0 ( 0 q(x)dx)dx Q0 x M0
M >0
x
1 Mz(x)
EI z
f ( x ) 0 fy
M <0
yf f ( x ) 0
1 ± f ( x)
(1 f 2 )3 2
小变形
±f
( x)
x f ( x) M z ( x) EI z
f ( x ) M ( x ) …… (2)
EI
式(2)就是挠曲线近似微分方程
对于等截面直梁,挠曲线近似微分方程可写成如下形式:
实梁“位移”微分方程的积分
EIf ( x) M( x)
x
EI EIf ( x) 0 ( M ( x))dx EI 0
xx
EIf ( x) 0 ( 0 ( M ( x))dx)dx EI 0 x EIf 0
下脚标带“0”的量均为坐标原点的量。 EIf ( x) M(x)
EI ( x) Q(x)
f 同向为正,反之为负。
P
二、转角:横截面绕其中
A
Bx
性轴转动的角度。用
表示,顺时针转动为正,
C1
反之为负。
f
三、挠曲线:变形后,轴线变为光滑曲线,该曲线称为挠曲线。
其方程为:
=f(x)
四、转角与挠曲线的关系:
tg
df
小变形
dx
f …… (1)
§8-2 梁的挠曲线近似微分方程及其积分
一、挠曲线近似微分方程
x)3
C1
x
C2
D1 x D2
应用位移边界条件求积分常数
a
EIf
(0)
1 6
Pa3
C2
0
P
x
EI
(0)
1 2
Pa2
C1
0
f
L
(a ) (a ) C1 D1
f (a ) f (a )
C1a C2 D1a D2
C1
D1
1 2
Pa2
; C2
D2
1 6
Pa3
写出弹性曲线方程并画出曲线
:依实梁的“位移”边界条件建立虚梁的“力”边界条件。
EIf A M A ; EI A QA
实梁
共轭梁
虚梁
支 承 和 端 部 情 况 位移边界 力边界
相应的支承和端部情况
A
固定端A
A
自由端A
A
铰支端A
中间铰
A
支座A
A
中间铰A
fA 0
A 0
fA 0
A 0
fA 0
A 0
MA 0 QA 0
梁的挠曲线微分:方E程 If ( x) M ( x) 梁的外载与内力的为关 : M系(x) q(x)
上二式形式相同,用类比法,将微分方程从形式上转化为 外载与内力的关系方程。从而把求挠度与转角的问题转化为求 弯矩与剪力的问题。
三、共轭梁(实梁与虚梁的关系): :x 轴指向及坐标原点完全相同。 :几何形状完全相同。 :实梁对应方程: EIf ( x) M( x)
(L)
PL2 2EI
f max
f (L)
PL3 3EI
解:建立坐标系并写出弯矩方程
P
a
M
(
ቤተ መጻሕፍቲ ባይዱx)
P( 0
x
a)
(0 x a) (a x L)
x
L
写出微分方程的积分并积分
f
EIf
P(a 0
x)
(0 x a) (a x L)
EIf
1 2
P(a
x)2
C1
D1
EIf
1 6
P(a
P
f
(
x)
6EI P
6EI
(a x)3 3a2 x a3 3a2 x a3
(0 x a) (a x L)
最大挠度及最大转角
max
(a)
Pa 2 2EI
P a
x
L
fmax
f (L)
Pa 2 6EI
3L a
f
§8-3 求梁的挠度与转角的共轭梁法
一、方法的用途:求梁上指定点的挠度与转角。 二、方法的理论基础:相似比拟。
第八章 弯曲变形
§8–1 概述 §8–2 梁的挠曲线近似微分方程及其积分 §8–3 求梁的挠度与转角的共轭梁法 §8-4 按叠加原理求梁的挠度与转角 §8-5 梁的刚度校核 §8-6 梁内的弯曲应变能 §8-7 简单超静定梁的求解方法 §8-8 梁内的弯曲应变能
§8-1 概 述
一、挠度:横截面形心沿垂直于轴线方向的位移。用 表示。与
③: 令: q( x) - M(x) 依此建立虚梁上的分布载荷。
④:依实梁的“位移”边界条件,建立虚梁的“力”边界条件。
EIf A M A ; EI A QA
a :固定端 ←→ 自由端 b :铰支座 ←→ 铰支座 c :中间铰支座 ←→ 中间铰链
⑤ :依虚梁的“内力”,求实梁的“位移”。
fx
Mx EI
EIf ( x) M( x)
二、求挠曲线方程(弹性曲线) 1、微分方程的积分
EIf ( x) M( x)
EIf ( x) (M( x))dx C1 EIf ( x) ( ( M( x))dx)dx C1 x C2
2、位移边界条件
A
P
C
B
D
P
、支点位移条件:
fA 0 fB 0
MA 0 QA 0
MA 0 QA 0
A
自由端A
A
固定端A
A
铰支端A
fA 0
M A 0 中间铰A
A
A左 A右 0 QA左 QA右 0
f A左 f A右
MA左 MA右 中间铰
A
A左 A右
QA左 QA右
支座A
总结:等截面实梁与虚梁的关系: ①: x 轴指向及坐标原点完全相同。②:几何形状完全相同。
、连续条件: fC fC
、光滑条件: C C
fD 0 D 0
或写成fC 左 fC 右
或 写 成 C 左 C 右
例 8-2-1:求下列各等截面直梁的弹性曲线、最大挠度及最大转角。
解:建立坐标系并写出弯矩方程 M( x) P( x L)
L
P
x
写出微分方程的积分并积分
f
EIf M( x) P(L x) 应用位移边界条件求积分常数
; x
Qx EI
例 8-3-1:求下列等截面直梁B点的位移(挠度和转角)。
q A
L
f q0
qL 2 2
q(x)
解: 建立坐标和虚梁