布线机器人工作台基于有限元模态分析
电动振动台的建模与有限元模态分析研究的开题报告
电动振动台的建模与有限元模态分析研究的开题报告一、研究背景电动振动台在工业生产和实验研究中被广泛应用。
在进行振动实验时,电动振动台能够提供所需要的激励,并控制激励信号的频率、幅值和相位等参数,以满足实验要求。
而有限元模拟则是一种较为常用的分析工具,可用于分析电动振动台的结构特性、振动响应及其与振动台载荷或被测物体之间的相互作用。
二、研究目的本研究的主要目的是建立电动振动台的有限元模型,并进行模态分析,以确定其结构的主要振动模态和相应的频率响应特性。
具体目标包括以下几个方面:1. 根据电动振动台的实际结构和工作原理,建立合理的有限元模型,包括材料属性、几何尺寸和约束等方面的参数;2. 进行模态分析,确定电动振动台的自然频率和相应振动模式,分析其主要结构部件的振动模态和特征;3. 分析电动振动台的动力响应特性,包括其频率响应和振动加速度等参数的变化规律;4. 优化电动振动台结构,设计新的改进方案,以提高其性能和实用价值。
三、研究内容本研究的主要内容包括以下几个方面:1. 电动振动台的理论研究与设计:首先对电动振动台的工作原理和结构特点进行研究,包括激励机构、支座系统、载荷结构和控制系统等方面,并设计出合理、稳定的电动振动台结构。
2. 电动振动台的有限元建模:根据电动振动台的实际结构和工作原理,建立具有合理材料属性、几何尺寸和约束等方面参数的有限元模型,以实现在特定工况下的振动响应分析。
3. 电动振动台的模态分析:进行有限元模态分析,确定电动振动台的自然频率和相应振动模式,并分析其主要结构部件的振动模态和特征。
4. 电动振动台的动力响应特性分析:分析电动振动台的动力响应特性,包括其振动加速度和频率响应等参数的变化规律,为电动振动台的实际应用提供参考。
5. 优化电动振动台结构:基于建立的有限元模型和模态分析结果,设计新的改进方案,以提高电动振动台的性能和实用价值。
四、研究方法本研究采用以下方法:1. 理论分析:对电动振动台的工作原理、结构特点和振动响应规律进行理论分析,为建立有限元模型和模态分析打下基础。
I-DEAS有限元模态分析技术指南[1]
![I-DEAS有限元模态分析技术指南[1]](https://img.taocdn.com/s3/m/9d19f91a6bd97f192279e917.png)
5
这种方法是通过一个自定义的程序文件来进行模态分析。 例如改变标准解算 的顺序,采用矩阵运算命令等。 ( 2 )用户自定义 指定用户自定义解算使用的程序文件。 有关的详细内容请参阅有关模型开放 式解算的文献。 ( 3 )应力刚化 计入应力刚化影响。 对许多结构,特别是薄壳类或线状结构,其初始结构刚度较小,而同时又作 用有大的膜载荷,因此应力刚化对结构的动态特性具有重要影响。熟悉的例子包 括梁柱问题,张紧的鼓面,拉伸的电缆、琴弦等等。 软件在小变形范畴内计入应力刚化影响。 (例如,刚度和体力的计算是基于 结构的初始构形,载荷的作用方向不随结构变形而改变。 ) 缺省情况是不计入应力刚化影响。 尽管在正则模态分析的边界条件集中不能包括载荷集, 但是进行考虑应力刚 化的模态分析时,可以利用载荷集来计算结构的应力刚度。为了包括载荷集,可 以打开 Select Load Set 的开关,从中选取需要的载荷集。 注:后处理中看到的应力值是在未计入应力刚化影响情况下计算得出的。 有关应力刚化的更多知识请参阅关于应力刚化列式的讨论。 ( 4 )选取载荷集 指定用于应力刚化分析的载荷集。 要选取载荷集,可以打开本开关,从载荷集列表中选取即可。 记住,生成正则模态分析的边界条件集时不能包括载荷集。 ( 5 )旋转软化 计入旋转软化影响。 旋转软化影响取决于旋转结构角速度和质量, 可以看成是依赖于结构变形的 的一种载荷。只有在考虑应力刚化时才能计入旋转软化影响。 缺省情况下,不计入旋转软化影响。 有关旋转软化的更多知识请参阅关于旋转软化列式的讨论。 ( 6 )刚体模态阶数 输入要考虑的刚体模态数。 在欠约束的情况下, 结构的刚体运动可以看成是三个平动方向和三个转动方 向的刚体运动的合成。这些刚体运动称为结构的刚体模态。 为了分析结构存在哪种刚体运动, 必须首先在分析的边界条件中定义运动学 自由度,并输入刚体模态的阶数。 运动学自由度的选取原则是:假设这些自由度被约束,则结构的所有刚体运 动均被消除。因此结构运动学自由度的数目必须大于或等于刚体模态数。大多数 情况下,定义不共线的三个节点的平动自由度作为运动学自由度是足够的。
机械结构的模态分析与有限元优化

机械结构的模态分析与有限元优化概述:机械结构的模态分析是一种重要的工程设计技术,通过分析和优化结构的动态特性,可以有效提高结构的运行安全性和性能稳定性。
在这篇文章中,我们将探讨机械结构的模态分析和有限元优化的意义、方法和应用。
一、模态分析的意义模态分析是指对机械结构在自由振动状态下的固有频率、模态形态和模态振型等进行分析的过程。
通过模态分析,可以得到结构的固有频率,从而了解结构在振动中的表现,为减少振动和噪声、避免共振、提高结构的稳定性和寿命等提供参考依据。
二、模态分析的方法1. 理论分析法:根据结构的几何形状、弹性模量、密度等参数,利用数学公式推导出结构的模态属性。
2. 实验测量法:通过悬挂结构或加振器对结构进行激励,再用传感器进行测量和记录振动信号,通过信号处理和分析得到结构的模态参数。
3. 数值计算法:利用计算机数值模拟方法,建立结构的有限元模型,对结构进行求解,得到结构的模态属性。
三、有限元优化的意义有限元优化是指通过改变结构的尺寸、材料、连接方式等设计参数,以达到优化结构的目的。
有限元优化可以在保持结构刚度和强度的前提下,减小结构的质量、体积和成本,提高结构的性能和可靠性。
四、有限元优化的方法1. 参数化建模:通过对结构进行几何参数化建模,将设计参数用变量代替,建立参数化模型,以便进行优化参数的调整。
2. 建立约束条件:根据设计要求和目标,建立合理的约束条件,如材料属性、受力范围、尺寸限制等。
3. 选择优化算法:根据问题的特点选择适当的优化算法,如遗传算法、粒子群算法、模拟退火算法等。
4. 求解优化问题:利用已建立的参数化模型和定义的优化算法,通过迭代计算的方法,求解优化问题,并得出最佳设计结果。
五、模态分析与有限元优化的应用模态分析和有限元优化在机械结构设计中的应用非常广泛。
通过模态分析,可以评估和改善结构的动态特性,比如减少共振、降低振动、改善结构的稳定性等。
有限元优化在机械结构设计中的应用更是无处不在,通过优化结构的尺寸、形状和材料等设计参数,可以大幅度提高结构的性能和效率。
机器人机械手的有限元分析及相关控制的研究(长沙理工2014优秀论文)
第 1 关节
电机自带
结合机器人机械手的工作状况,选择如表 3-3 所示电机和减速机构。
3.4 机器人结构设计
图 3.3 各关节结构图
4 机器人关键部件的有限元分析
4.1 机器人关键部件有限元模型的建立
-3-
4.1.1 基座、大臂、小臂实体模型的简化 通常对于实体模型的细节进行一定的几何简化,尽量忽略一些不必要的细节,去除一些与分析意图影响不大的零件 及特征,以利于有限元分析。
-3
图 3.2 关节的极限位置图 3.2.2 各关节功率估算 电机功率计算采用公式 又有 n=ω×60/2 π 得到如下计算结果(单位 W) : 表 3-2 各关节极限力矩和功率计算结果 关节号 极限力矩(N·m) 计算功率(W) 7 2.400 12.0 6 3.213 32.1 5 3.675 30.6 4 26.435 164.2 3 22.638 189.3 2 51.451 430.1 1 64.345 750.3
1.引言
机器人技术是现代科学技术高度集成和交融的产物,它涉及机械、控制、电子、传感器、计算机、生物学、人工智 能等众多学科领域,是当代最具代表性的机电一体化技术之一 。随着科技的日益先进,消费者的生活不断的得到提高。 然而,人们对生活的品质要求却越来越高。本课题就是在这样一个背景下展开工作的。 目前,市场上大型工业机器人已经日趋成熟。而对于贴近人们生活层面的小型机器人机械手却很稀少,而我国在这 一方面存在更大的空缺。将工业机器人小型化,引入人们的生活做一些必要的工作,将大大提高人们的生活品质。
(3-1)
极限位置的速度和加速度由表 2-2 所示。 (1) 第 7 关节力矩
图 3.1 第 7 关节传动示意图 -2-
第 6 关传动示意节图
基于有限元分析下的水下机器人优化

基于有限元分析下的水下机器人优化水下机器人是一种能够在海洋等水下环境中自主运动、执行任务的机器人。
随着海洋资源的开发和利用,水下机器人的应用越来越广泛。
但是,水下机器人在运动和执行任务过程中还面临一些问题,如运动过程中的稳定性和速度等。
为了优化水下机器人的运动和执行任务能力,可以采用有限元分析的方法对其进行优化设计。
有限元分析是一种数值仿真方法,能够对机器的力学性能、材料特性、热学性能等进行模拟分析,为机器的设计提供指导。
下面将介绍基于有限元分析的水下机器人优化方法。
首先,进行有限元模型构建。
有限元模型是基于机器的几何形状和材料特性构建的,包括机器的表面、内部结构、材料等。
在构建有限元模型过程中需要确定模型的边界条件和物理特性参数等。
通过有限元模型的构建,可以对机器的结构和材料特性进行精细化建模,为优化设计提供基础。
其次,进行有限元仿真分析。
有限元仿真分析是通过将机器的有限元模型输入到计算机仿真软件中,进行数值仿真分析。
有限元仿真分析主要包括状态仿真、应力仿真和模态仿真等。
其中状态仿真是对机器的运动状态进行仿真分析,包括机器的速度、加速度等;应力仿真是对机器的结构进行应力分析,评估机器在工作状态下的承载能力和结构稳定性;模态仿真是对机器的振动特性进行模拟分析,评估机器在不同工作状态下的振动响应情况。
通过有限元仿真分析,可以准确地了解机器在工作状态下的性能和特性,为优化设计提供参考。
最后,进行优化设计。
优化设计主要是在有限元分析结果的基础上,对机器的结构和材料进行改进,提高其运动和执行任务能力。
例如,可以对机器的结构进行优化,提高其稳定性和速度,比如采用流线型设计,减小水下环境对机器的阻力;可以对机器的材料进行优化,提高其强度和刚度,使其能够承载更大的负载。
通过优化设计,可以进一步提高水下机器人的性能和效率,满足不同任务的需求。
综上所述,基于有限元分析的水下机器人优化是一种有效的方法,能够通过精细化的数值仿真分析和优化设计,进一步提高机器的性能和效率,满足不同任务的需求。
基于有限元的交流伺服电机仿真分析

基于有限元的交流伺服电机仿真分析有限元方法是一种常用于电机仿真分析的数值计算方法,它能够通过将电机结构划分成很多个小的单元来近似描述电机的真实行为。
基于有限元的交流伺服电机仿真分析是利用有限元方法对交流伺服电机进行模拟和分析的过程。
交流伺服电机是一种常用于工业自动化系统中的电动机,它通过反馈控制系统来实现对电机转速和位置的精确控制。
在设计和优化交流伺服电机时,需要进行各种仿真分析来评估电机的性能,并提出改进方案。
有限元方法在交流伺服电机仿真分析中的应用主要包括以下几个方面:1. 结构分析:有限元方法可以用来分析电机的结构强度和刚度,确定电机在运行过程中是否存在结构失效或变形现象。
通过结构分析,可以评估电机的稳定性和可靠性,并优化电机的设计。
2. 磁场分析:交流伺服电机的磁场分布对电机的性能有很大影响。
有限元方法可以用来模拟电机的磁场分布,进而评估电机的磁场强度、磁通密度等参数,为电机的设计和优化提供依据。
3. 电磁场与结构耦合分析:在交流伺服电机中,电磁场与结构之间存在相互作用。
有限元方法可以用来模拟电磁场与结构的相互影响,例如电磁场对结构的力的影响、结构对电磁场的磁阻影响等。
通过电磁场与结构耦合分析,可以评估电机的振动和噪声等问题,并改进电机的设计。
4. 效率分析:交流伺服电机的效率是衡量电机性能的重要指标之一。
有限元方法可以用来模拟电机的转子损耗和定子损耗等效应,进而计算电机的效率。
通过效率分析,可以评估电机的能量转换效率,并提出改进措施。
基于有限元的交流伺服电机仿真分析是一种重要的电动机分析方法,能够帮助工程师更好地理解电机的行为和性能,并为电机的设计和优化提供参考依据。
基于有限元分析下的水下机器人优化

基于有限元分析下的水下机器人优化
水下机器人是指能够在水下环境中执行各种任务的机器人。
随着海洋资源的开发和环
境监测的需求增加,水下机器人的研究和应用变得越来越重要。
有限元分析是一种常用的
工程设计方法,可以通过数值计算模拟材料和结构的力学特性。
在水下机器人的优化设计中,有限元分析可以发挥重要作用。
有限元分析可以用于水下机器人的结构优化。
水下机器人通常由多个组件和结构组成,例如机体、运动装置、传感器等。
有限元分析可以对这些结构进行模拟和分析,评估其在
水下环境中的承载能力和耐久性。
通过对结构进行优化,在保证机器人结构强度的前提下,可以减少材料的使用和重量的增加,提高机器人的性能和效率。
有限元分析可以用于水下机器人的动力学优化。
水下机器人在水中运动时,需要克服
水流的阻力和水的浮力等力的作用。
有限元分析可以模拟水流对机器人的作用力,评估机
器人的运动性能和稳定性。
通过优化机器人的外形和动力系统,可以减小运动阻力,提高
机器人的运动速度和精确度。
有限元分析还可以用于水下机器人的传感器优化。
水下机器人通常配备各种传感器,
用于检测海洋环境的参数和目标物体的位置和属性。
有限元分析可以模拟传感器的工作原
理和响应特性,评估其探测范围和灵敏度。
通过优化传感器的类型和布置方式,可以提高
机器人的感知能力,实现更精确和准确的任务执行。
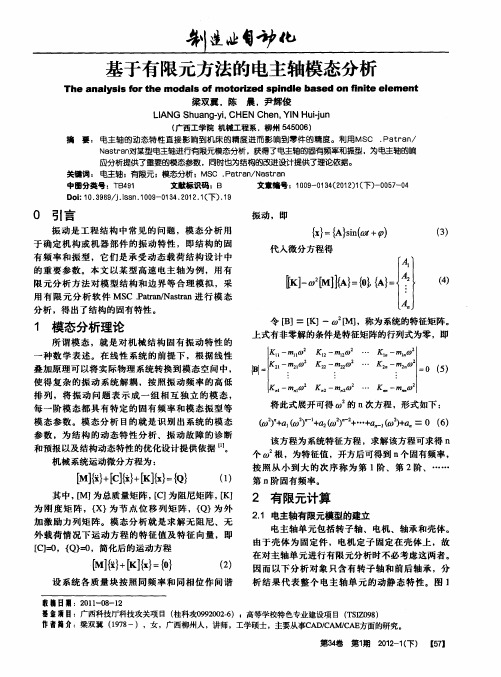
基于有限元方法的电主轴模态分析
II-- : … 一 一: ( BK . z : I 5 I2 一 :1 : m ∞ : 一 o ) :
I — H K2 2 … K — M K m1 ^ m 一 C O 缈l
将 此式 展开 可得 ∞ 的 n次方 程 ,形 式 如下 :
基金项目:广西科技厅科技攻关项 目 ( 桂科攻0 90 2 ),高等学校特色专业建设项目 (SZ 9 ) 920— 6 T I08 作者简介:粱双翼 (98 17 ~) , , 西柳 州人 , 师 ,工学硕士 ,主要从事C DC 女 广 讲 A , A 方面的研究 。 E 第3 卷 第1 21- ( 【7 4 期 02 1下) 5】
每 一阶 模 态 都 具 有 特 定 的 固 有 频 率 和 模 态 振 型 等 模 态 参数 。模 态分 析 目的 就 是 识 别 出系 统 的 模 态
) 口 ) 以 ) …+ l ) =0 () l + 2 + 一 + + 6
该 方程 为 系统 特征 方程 ,求 解该 方程 可求 得 n 个 ∞ 根 ,为特征 值 ,开方 后可 得到 1个 固有频 率 , 1 _ 按 照 从 小 到 大 的 次 序 称 为 第 1 、第 2阶 、 …… 阶 第 1阶 固 有频率 。 1
务I 匐 似
是 H0 5 L龙门数控铣床电主轴的转子轴结构简图。 转子 轴 在 前 后各 两 个 轴 承 的 支 承下 高 速 旋 转 ,轴
【 】0 [ > o C = ,_ = ,简 化后 的运 动 方程 Q
在对主轴单元进行有限元分析时不必考虑这两者。
[ 位 +K { =0 M】} [】 ) { x }
股穗 日翔 :2 1-0-1 01 8 2
() 2
设系统各质量块按照 同频率 和同相位作间谐
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
布线机器人工作台基于有限元模态分析任贵东,田春林,张鹏,乔勇,彭辉,熊肸(长春理工大学机电工程学院,长舂130022)摘要:文中运用三维软件Solid Works 对工作台进行建模,将模型直接导入ANSYS Workbench 对模型进行模态分析,查看模型的前6阶固有频率及振型,发现模型最大变形位置。
该分析结果为动力学分析提供理论依据,有助于进行结构优化。
关键词:ANSYS Workbench ;工作台;模态分析中图分类号:TB 122文献标志码:A文章编号:1002-2333(2016)12-0082-03Modal Analysis on the Platform of Wiring Robot Based on FEMRENGuidong, TIAN Chunlin, ZHANG Peng, QIAO Yong, PENG Hui, XIONG Xi(School of Mechanical and Electrical Engineering, Changchun University of Science and Technology, Changchun 130022, China)Abstract : Three-dimensional model of the operating platform is built using SolidWorks and imported into the ANSYSWorkbench. Modal analysis is carried out, the first 6 order natural frequency and the vibration mode characteristics of the Operating platform are obtained. The max deformation position is defined. The analysis results provide reference for the structure improvement and dynamic analysis of the operating platform.Keywords : ANSYS Workbench; platform; model analysis引言布线机器人要实现线束的自动化生产,提高线束生产效率降低劳动强度,促进相关行业实现自动化[M 。
工作台是整体的重要组成部分,各零部件将在其基础 上安装,工作台的力学性能、动态特性将直接影响其他零 部件的安装精度和可靠性。
在工作台的设计研发过程中, 必须掌握工作台的固有频率及最大变形位置,研究变形形 式能否满足使用要求。
因此有必要对工作台进行模态分 析,为动力学研究、结构优化、改进提供理论依据[参考文献][1] 高其烈.压缩机行业技术进展史话侧记[J].压缩机技术,2009 (1):48-61.[2] 耿爱农,李辛沫,陈君立,等.无油润滑空压机活塞连杆组件结构改进设计[J].压缩机技术,2011(2):62-64.[3] 谈卓君,左正兴,张儒华.内燃机连杆有限元分析进展[J].中国机械工程,2004,15 (4) :365-369.[4] 王远,朱会田,曹永晟,等.基于有限元法的发动机连杆疲劳强度分析研究[J].机械传动,2010,34(3):68-71.[5] LEE T H, JUNG J J. Metamodel-Based Shape Optimization ofConnecting Rod Considering Fatigue Life[j]. Key EngineeringMaterials,2006,539 (306) :211-216.[6] 谈梅兰,武国玉,梁福祥.基于ABAQUS 的连杆疲劳分析[J].中国 机械工程,2013,24( 3)=634-637.[7] 张宪,何洋,钟江,等.疲劳振动试验台的模态与谐响应分析[J]. 机械设计与制造,2008(4):12-14.[8] LI Changyou, QIAO Changshuai, ZHANG Yimin.Reliabilityoptimization design of connecting rod of locomotive traction equipment [j].Proceedings of the Institution of Mechanical 1模型建立工作台为了适应产品结构功能需要,两侧分别安装 两根导轨、一根齿条,用于带动滑台在工作台上移动,工 作台下面安装有减震地脚,使工作台安装更加稳定。
由于 实际结构比较复 杂,如果完全按照 实物建立模型又是 不必要的,因此在 网格划分前常将一 些细节特征压缩处 理。
g 些特麗舰Engineers, Part C: Journal of Mechanical Engineering Science,2015(9):1623-1629.[9] 高耀东,宿福存.ANSYS Workbench 机械工程应用精华30例[M].北京:电子工业出版社,2013.[10] 张瑛,张庆功.W2.85型空压机曲轴-连杆-活塞机构的运动学仿真[J ].煤矿机械,2008,29(7 ):60-62.[11] 叶国林,曾建谋,杜宝雷.柴油机连杆有限元分析[J].内燃机, 2008,2(1):11-14.[12] 马斌.柴油机连杆的动态应力分析及优化设计[J].机械设计,2012,29(4):59-62.[13 ]王晓云,罗丹,任耿鑫.基于ANSYS 的485Q 型连杆动态特性分析 [J].机械传动,2011,35(8):81-84.[14] 吕端,曾东建,于晓洋,等•基于ANSYS Workbench 的V8发动机 曲轴有限元模态分析[J].机械设计与制造,2012(8):11-13.[15] 钱学毅,吴双.连杆动态应力有限元仿真分析[J].机械传动,2009,33(2):83-85. (编辑黄荻)作者简介:杨斌(1991—),男,硕士研究生,研究方向为机电一体化。
收稿日期:2016-09-2682I 2016 年第 12 期网址: 电邮:hrbengineer@圆角、倒角、小的槽、定位孔等。
工作台具体结构如图1所示。
2基于ANSYS Workbench的有限元分析2.7模态分析概述在经典力学理论中,物体动力学通用方程为:M x "+C x ’+K x =F (t )。
(1)式中.是质量矩阵;C 是阻尼矩阵,是刚度矩阵;x 是位 移矢量;是力矢量;x '是速度矢量;x "是加速度矢量。
无阻尼的模态分析是经典特征值问题,动力学问题的运 动方程为M ,+[c =0o(2)结构的自由振动为简谐振动,位移是正弦函数,即n s i n (o ^) 〇(3)带入式(2),得([-w2珠=0。
(4)这个方程的特征值为^,其开方就是自振圆频率,自振 动频率为/^/(2tt )。
特征值^对应的特征向量x *自振动 频率X(2tt )对应的振型。
模态分析是最基本的线性动力学分析,用于分析结构的自振频率,包括固有频率及振 型参与系数。
2.2导入几何体ANSYS Workbenchl4.0支持两种几何建模方式[11_12], 一种是在ANSYS Workbench 自带的几何建模模块 (Design Modeler)中根据设计图样直接建立CAD 模型;另 一种是在其他的CAD 软件,如Pro/Solid Works 中建立几何 模型,再利用ANSYS Workbench 支持的几何模型导入接 口将已建立的模型文件读入ANSYS Workbench 中。
本文 采用第二种方法,在SolidWorks 中建模后导入ANSYS 中进行模态分析。
采用参数化建模方式,便于根据设计要求更 改模型的尺寸。
2.3添加材料库表1工作台零部件材料属性零部件材料密度/(kg.m-3)弹性模量/GPa泊松比减震地脚球磨铸铁72001560.282齿条45钢78902090.268导轨GCrl578302190.300工作台面45钢78902090.2682.4划分网格ANSYS Workbench 15.0有强大的网格划分能力,自带多种网格划分工具,Mechanical、ICEM CFD 、TGrid 、 Gambit 等。
这些网格划分工具可以划分出不同的网格格式,以满足不同的有限元分析软件对格式的要求。
由于工 作台结构复杂,零部件较多,自动划分四面体网格,在模型边界局部细化,采用棱柱形网格。
网格划分结果:750.002250.00图2网格划分效果D eta ils o f 'M esh "3DefaultsP hysics PreferenceMechanical□ R elevance 03Sizing 3Inflation3Patch Conform ing O ptions ±)Advanced3Defeaturing 3Statistics□ Nodes390024〇 E lem ents 203572Mesh MetricNone图3网格划分节点数目『靡■碰孤丽臟W AV 遞膽顯賴狐W 麵图4施加固定约束ModeP" Frequency [Hz]1_1.124.28Y 2.150.82Y 3.159.184 4.164.255_5. 181.756~6.182.94图5各阶频率T o t a l D e f:124^8 H z图6 —阶振型图T o t a l D e f o r m a t io n F r e q u e n c y : 150.82 2016/6/4 16571.15960.77304t曹图7二阶振型图网址: 电邮:hrbengineer@ 2016 年第 12 期■ 832.5施加载荷与约束对工作台10个减震地脚全部添加固定约束,符合工程实际需要。
工作台添加约束后效果如图4所示。
2.6结果后处理结果后处理是整个模态分析中最重要部分,检验结 果的正确性、合理性,得到所需要的固有频率和振型&14]。
通过对工作台前六阶振型分析发现,工作台主要是在巧 平面的弯曲变形。
工作台各阶频率及振型如图5〜图11所7K 〇3结束语由于SolidWorks 软件建立三维实体的能力强大,而且 操作更加简便,所以使用三维软件SolidWorkd ^T 作台进 行建模,然后在ANSYS Workbench 中直接引入模型,对其 进行模态分析。
为了提高模态分析效率,在保证分析结果 正确前提下,建立实体过程中简化工作台一些细微结构。