基于LabVIEW的液位神经网络PID控制系统
基于labview的液面控制系统设计
基于labview的液面控制系统设计【摘要】 labview软件使用流程图编程,具有开放性,模块化,可重复性、互换性等特点,并且与外部硬件连接方便,可以实现实时控制,进行硬件在环仿真实验。
【关键词】虚拟仪器;labview;硬件在环;时滞;预测控制;动态矩阵labview是一种程序开发环境,与其他计算机语言的显著区别是,labview软件使用流程图编程,具有开放性,模块化,可重复性、互换性等特点,并且与外部硬件连接方便,可以实现实时控制,进行硬件在环仿真实验。
一、液位控制系统建立整个液位控制系统由控制器、电动调节阀、上水箱、中水箱、下水箱和液位变送器模块等组成。
控制器的输出量用于控制电动调节阀的开度。
1.液位控制系统的控制目标水箱的液位变化范围为h=0~200mm,要求通过设计合适的控制器,能使下水箱的液位稳、准、快的稳定在给定的液位上,稳态液位误差不超过5mm。
当水箱发生扰动(正扰动或者负扰动)时,被控量能迅速恢复到系统原来所要求的液位值。
2.液位被控对象模型该系统是由三个单容水箱组成,其中每一个水箱对象为一个一阶惯性环节,且具有自平衡性。
我们的目的是控制下水箱的液位,被控系统是由三个水箱的串联则组成。
给调节阀一个阶跃输入信号,测量系统的阶跃响应曲线。
可见τ/t接近0.3系统存在时滞现象,所以该系统是一个具有时滞的液位控制系统。
由于系统就有时滞特性,并且模型是可变的,存在干扰,为了达到良好的控制效果,普通的pid控制算法是满足不了要求的。
鉴于预测控制的特点,我们选用预测控制算法进行液位控制。
二、液位测控系统的硬件组成控制算法的实现是以实际控制系统的建立为基础。
因此在设计控制算法程序之前,应该根据实际控制系统的需要以及性能价格比选择合适的控制硬件组成实际的控制系统,并分析被控对象的动态特性,达到一定的控制目的。
三、液位测控平台的软件介绍1.虚拟仪器简介与传统仪器相比,虚拟仪器具有更大的开放性,模块化,可重复性、互换性等特点。
基于LabVIEW的液位控制系统设计

基于LabVIEW的液位控制系统设计张文硕;张井岗;赵志诚【摘要】本文以液位控制系统为研究对象,基于LabVIEW开发软件以及NI公司PCI-6024E数据采集板卡建立了液位控制系统的实验平台.该平台具有人机交互界面良好,开发周期短的特点,可以在该平台上设计不同的控制算法进行实验研究,扩展了过程控制实验装置的功能.笔者针对双容液位控制系统,设计了PID控制器和单神经元PID控制器.实验运行结果证明了所建立实验平台的有效性.【期刊名称】《电气电子教学学报》【年(卷),期】2013(035)002【总页数】4页(P104-107)【关键词】LabVIEW;双容水箱【作者】张文硕;张井岗;赵志诚【作者单位】太原科技大学电子信息工程学院,山西太原030024;太原科技大学电子信息工程学院,山西太原030024;太原科技大学电子信息工程学院,山西太原030024【正文语种】中文【中图分类】TP273+.50 引言THSA-1型过控综合自动化控制系统实验装置是根据过程控制自动化及相关专业教学特点开发的一套实验装置。
该装置可对液位、温度、压力和流量等热工参数实现单回路控制和串级控制等多种控制[1,2]。
我们可以在该实验装置上设计PLC控制、AI智能仪表控制和远程数据采集控制等多种控制系统,加深学生对理论知识的理解,提高其动手能力[3-5]。
但该实验的控制算法均为 PID控制,没有提供其它控制算法,这对学生深入理解不同控制算法及应用仍有一定的局限性。
利用LabVIEW能够快速搭建控制系统的图形用户界面,与传统的文本式编程语言相比,可以提高工作效率,缩短开发周期[6]。
另外,LabVIEW还提供了实现仪器编程和数据采集的途径,结合NI公司数据采集板卡,通过在 Measurement &Automation(MAX)软件上简单设置即可实现两者之间相互数据传输,快捷方便[7]。
本文利用LabVIEW开发环境和NI公司数据采集板卡在THSA-1型实验装置上建立液位控制系统实验平台,可以灵活地设计不同的控制算法进行实验研究,扩展了过程控制实验装置的功能。
基于 LabVIEW 的神经网络 PID 温度控制系统研究

了一 种新型的无辨识 自适应 预估控 制算 法 , 将 单神 经元 网络结
0 引 言
传统 P I D控制 由于结 构简单 实用 、 直观性好 、 可 靠性高 、 性 价 比高等优点 , 在工业控制 中得 到较 为广泛 的应用 , 尤其适用 于 建立 了精确线性模型 的控制系统 。然而传统 P I D控制 的明显缺 点就是 其 P I D参数 的 整定 繁琐 , 控制 效果 的 优劣 直接 取 决于 P I D各参 数选取 的好坏 。同时其参数 整定 易受外界 干扰 , 对 于
关键词 中图分类号 神经 网络 T P 2 7 3 P I D 温度控制 文献标识码 L a b V I E W A D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 0 — 3 8 6 x . 2 0 1 3 . 1 2 . 0 6 9
oN NEURAL NETW oR K P I DEM BAS ED oN La b VI E W
C h e n Ru i l i n Xi T i a n p e n g T a n J i n z h u Ha o J u n P a n L o n g
( S c h o o l o fMe c h a n i c a l a n d P o w e r E n g i n e e r i n g, N a n j i n g U n i v e r s i t y o f T e c h n o l o g y , Ⅳ n n g 2 1 1 8 0 0, J i a n g s u , C h i n a )
c o n t r o 1 . Ex p e i r me n t a l r e s u l t s s h o w t h a t t h e s y s t e m o p e r a t e s s t a b l y a n d h a s s e l f - a d a p t a t i o n, t h e n e u r l a n e t w o r k P I D c o n t r o l l e r b a s e d o n t h e L a b - VI E W h a s h i g h a c c u r a c y. r o b u s t n e s s a n d a d a p t a b i l i t y i n d e a l i n g w i t h t h e r e a l ・ t i me t e mp e r a t u r e . Ke y wo r d s Ne u r l a n e t wo r k P I D T e mp e r a t u r e c o n t r o l L a b V I EW
基于LabVIEW的模糊PID液位控制系统实现

基于LabVIEW的模糊PID液位控制系统实现舒华;陈炬本【摘要】液位控制是工业控制中的重要问题,针对液位控制过程中存在大滞后、时变、非线性的特点,设计一种参数自适应的模糊PID控制器,可以在线实现PID参数的调整.介绍了基于LabVIEW的模糊逻辑工具箱(Fuzzy LogicToolkit),并利用该工具箱设计出模糊PID控制器并实现对三容水箱的控制实验.实验结果表明模糊PID 控制算法与常规PID算法相比具有鲁棒性强和动态性能好等特点,该控制方法对于三容水箱类系统控制是有效的.【期刊名称】《甘肃科技》【年(卷),期】2015(031)014【总页数】3页(P8-10)【关键词】控制理论与控制工程;LabVIEW;模糊控制;PID;三容水箱【作者】舒华;陈炬本【作者单位】广州大学机械与电气工程学院,广东广州510006;广州大学机械与电气工程学院,广东广州510006【正文语种】中文【中图分类】TP273多容器流程系统是具有纯滞后的非线性耦合系统,是过程控制中的一种典型的控制对象,在实际生产中有着非常广泛的应用背景。
用经典控制方法和常规仪表控制这类过程时,常因系统的多输入多输出关系以及系统的内部关联而使系统构成十分复杂,会明显地降低控制系统的调节品质,特别在耦合情况严重时会使各个系统均无法投入运行。
为解决这个问题,可以在传统的PID控制中加入智能算法,实现参数的自适应。
三容水箱液位控制系统是模拟多容器流程系统的多输入多输出、大迟延、非线性、耦合系统,基于该装置的智能液位控制算法研究对实际的工程应用有着非常重要的意义[1]。
本文以虚拟仪器软件LabVIEW为开发平台,运用LabVIEW 强大的数据采集功能模块以及PID Control Toolkit和Fuzzy Logic Toolkit两个工具箱,针对三容水箱控制系统设计实现了包括实际参数采集、控制量输出、曲线显示等功能的实时模糊PID液位控制系统[2]。
基于LabVIEW的PID参数自整定控制器设计

τ
τ
∞
( 2)
1 ( s + 1) n 1
( 1 + T0 s) n
式中 : A 0 为直流分量 , A n 、 B n 分别为基波及各次谐波分
n = 4, 6, 8
量的幅值 。 由于正弦信号为奇函数 , 所以输出的周期方波信 号也为奇函数 , 则可得到傅里叶级数的直流分量系数 与基波偶函数分量系数为 0, 即 :
39
基于 LabV IEW 的 P I D 参数自整定控制器设计 刘撷捷 ,等
4 P I D 参数自整定控制器设计
利用虚拟仪器技术及 LabV IEW 软件平台 ,设计了基 于继电反馈 PI D 参数自整定控制器。操作者只需简单地 按下开始键 ,就能得到一个效果比较好的 P I D 参数自整 定控制过程曲线界面。系统设计的程序流程如图 3所示。
e- s s +1 e- s ( s + 1) 2 e s ( s + 1)
- s
u ( t) =
d e ( t) > 0
- d e ( t) < 0 ( 1 )
参数 τ= 0. 5, 1, 2 τ= 0. 5, 1, 2
式中 : d 为继电器导通时输出的电压幅度 。 当系统处于等幅振荡时 , 非线性环节输入信号 ωt; 非线性环节输出信 e ( t) 为正弦信号 , 即 e ( t ) = A sin 号 u ( t) 为周期方波信号 , 周期为 Tu , 可以展开为傅里 叶级数 , 即 : ωt + B n sin n ωt) u ( t) = A 0 + 6 ( A n cosn
( 4)
式中 : Ku 为继电特性在传输幅度为 A 的正弦信号时的 等价临界振荡比例增益 , 幅度 A 可依据如图 2 ( b ) 所示 的振荡曲线计算 。
基于LabVIEW的液位灰色预测PID控制

别 于传 统 的文本 式 的编 程语 言 , 具有 良好 的人机 交 互界 面 , 开 发 效 率 高 引。本 文 将 虚 拟 仪 器 技 术 应 用到液位控制系统 中, 建 立 了基 于 L a b V I E W 的 液 位控 制 系统 , 扩展 了过 程控 制实 验装 置 的功能 。
司P C I - 6 0 2 4 E数 据采 集 板 卡 结 合 L a b V I E W 开 发 环 境在 T H J . 3型 过 程 控 制 实 验装 置 上 建 立 了液 位 控 制 系统 的实 验 平 台 , 具有开发效率高、 人 机界 面 好
的特点 。本 文 基 于 L a b V I E W 开发环境设计 了 P I D
可 以应 用到不 同的控 制结 构 中 , 以及 针对 不 同的 热
工参 数 进行控 制 , 具有较 强 的灵 活性 和可移 植性 。
控 制是 工业 过程 控 制 系统 的一 类典 型 代 表 , 具 有非 线性、 时滞 的 特 点 , 对 液 位 控 制 系 统 进 行 深 入 研 究 有 利 于工业 过程 控制 系统 的 发展 。 虚 拟仪 器技 术 具 有 灵 活性 好 、 可移 植 性 强 的 特点 , 它 采用 模块 化 的 硬件 结 合 高 效灵 活 的开 发环
T H J - 3型 过程 控制 系统 实验 装 置综 合 了 国 内外
以液位 控制 系 统 为 研 究 对 象 , 本 文基于 N I 公
同类 实验 装置 的优 点 , 能 够应 用 到 自动 化 等相 关 专 业 的实验 教 学 中 。该 实 验 装 置 包 括 液 位 、 流量 、 温
生深入 理 解 不 同控 制 算 法 造 成 一 定 的局 限。 液 位
labview实现PID控制
应用LabVIEW实现PID控制功能作为虚拟仪器的主流开发语言,图形语言(Graphical Language)在测试系统中得到广泛应用。
优秀的图形语言开发环境使LabVIEW不仅包括了开发虚拟仪器面板的各种对象和进行信号分析的丰富的函数,而且提供了外挂的PID控制工具包,使用户可以将虚拟仪器拓展到自动控制领域。
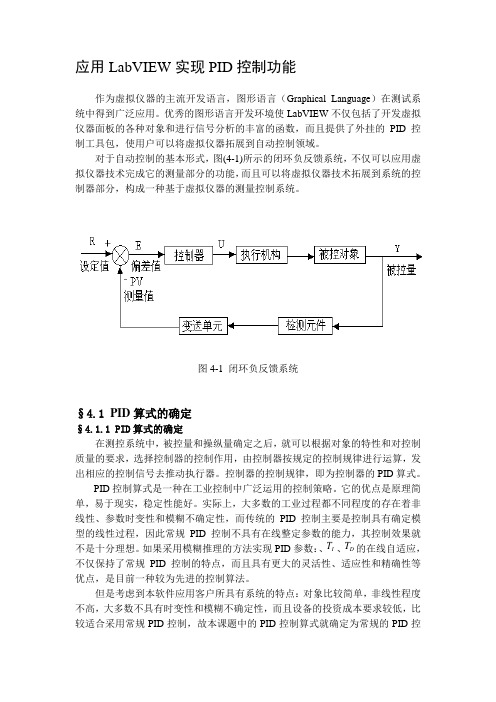
对于自动控制的基本形式,图(4-1)所示的闭环负反馈系统,不仅可以应用虚拟仪器技术完成它的测量部分的功能,而且可以将虚拟仪器技术拓展到系统的控制器部分,构成一种基于虚拟仪器的测量控制系统。
图4-1 闭环负反馈系统§4.1 PID算式的确定§4.1.1 PID算式的确定在测控系统中,被控量和操纵量确定之后,就可以根据对象的特性和对控制质量的要求,选择控制器的控制作用,由控制器按规定的控制规律进行运算,发出相应的控制信号去推动执行器。
控制器的控制规律,即为控制器的PID算式。
PID控制算式是一种在工业控制中广泛运用的控制策略。
它的优点是原理简单,易于现实,稳定性能好。
实际上,大多数的工业过程都不同程度的存在着非线性、参数时变性和模糊不确定性,而传统的PID控制主要是控制具有确定模型的线性过程,因此常规PID控制不具有在线整定参数的能力,其控制效果就不是十分理想。
如果采用模糊推理的方法实现PID参数:、I T、D T的在线自适应,不仅保持了常规PID控制的特点,而且具有更大的灵活性、适应性和精确性等优点,是目前一种较为先进的控制算法。
但是考虑到本软件应用客户所具有系统的特点:对象比较简单,非线性程度不高,大多数不具有时变性和模糊不确定性,而且设备的投资成本要求较低,比较适合采用常规PID控制,故本课题中的PID控制算式就确定为常规的PID控制算式。
§4.1.2数字PID 控制算式PID 控制就是确定一个被控制系统的输出量(Y(t)),驱动过程变量接近设定值,其中被控制的系统参数叫做过程变量(PV —Process Variable),将被控制的过程变量指定的理想值叫做设定值(R(t))。
基于labview的液位测控系统设计--大学毕业设计论文
摘要液位计算机测量与控制实验系统是为西北工业大学航空学院民航工程系综合实验平台而开发的课程教学实验系统。
液位测量与控制系统集传感器信号的采集、调理、转换、检测和控制为一体,是实时交互式图形界面应用系统。
该系统采集液位信号并用计算机可视化界面实时显示液位高度的变化过程;通过交互式对话框设置期望的液位高度,在检测当前液位的基础上控制进/出水阀门,从而对实际液位高度进行控制。
论文介绍了液位计算机测量与控制系统的结构与功能;分析了硬件系统中测量与控制电路的组成及工作原理;计算了信号调理电路中测量放大器的增益及各元件参数;使用PROTEL软件绘制了信号调理电路图;介绍了多功能数据采集卡NI USB-6008的特点、功能及软件开发平台LabVIEW;分析了系统的软件程序;介绍了液位计算机测控系统的用户使用界面所能实现的功能。
针对实验系统对液位进行开关控制所带来的问题,提出了用PID控制方法进行改进的措施。
关键词:液位测控,压力传感器,信号调理,NI USB-6008 ,LabVIEWABSTRACTThe liquid level measurement and control computer experimental system is a course teaching experimental system which is used to develop the comprehensive experimental platform for Aviation Institute of Civil Engineering of NWPU. The liquid level measurement and control system with real-time interactive graphical interface is of the sensor signal acquisition, conditioning, conversion, testing and control functions. The system acquires the signals of liquid level and computer interface real-time to show the liquid level changing process. Through an interactive dialog box, the desired water level is set. The actual water level is controlled based on the current liquid level detection through the import / outlet valves.The structure and function of the liquid level measurement and control computer experimental system is introduced at first. The hardware system composition and working principle is analyzed, and the gain and each components parameters of measuring amplifier in signal conditioning circuit are calculated. The signal conditioning circuit is drawn with PROTEL, and the features and functions of the multi-function data acquisition card NI USB-6008 and software development platform LabVIEW are introduced. The system software program is also analyzed. For the control problems of import / outlet valves of the liquid level measurement and control computer experimental system, a PID control method is proposed to improve the system performances.KEY WORDS:liquid level measurement and control,pressure sensor,signal conditioning ,NI USB-6008 ,LabVIEW目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 课题背景............................................................................. 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术创新《微计算机信息》(测控自动化)2010年第26卷第7-1期360元/年邮局订阅号:82-946《现场总线技术应用200例》控制系统基于LabVIEW 的液位神经网络PID 控制系统LabVIEW-Based Neural Netswork PID Control System for Tanker Level(湖南化工职业技术学院)匡芬芳KUANG Fen-fang摘要:本文将神经网络的BP 结构与常规PID 算法相结合引入液位控制系统的设计,同时探讨了神经网络PID 控制系统在虚拟仪器开发软件LabVIEW 中的实现方法。
仿真结果表明,神经网络PID 控制系统具有良好的动、静态控制效果,从而证实了其在水箱液位控制中的优势。
关键词:神经网络;PID 控制算法;液位控制;虚拟仪器;LabVIEW 实现中图分类号:TP183;TP391.9文献标识码:BAbstract:This paper integrates the Bpconstruction of neural networks to the PID algorithm and applies it to the level control,and discussed how to realize the control system in LabVIEW.Simulation results show that the approach largely improves the control per -formance of the level system ,which strongly testify that the neural network PID control system can obtain better control quality than ordinary PID control system in controlling the single water tanker level.Key words:Neural network;PID algorithm;Level control system;Virtual instrument;LabVIEW realization文章编号:1008-0570(2010)07-1-0060-031引言液位控制问题是工业生产中一类常见的问题,但液位对象因具有非线性、滞后、时变性等特性,采用经典PID 控制方案已很难满足人们对控制效果越来越高的要求。
而神经网络方法具有信息的分布式存贮、并行处理,以及自组织、自学习的功能,在处理多输入、非线性、耦合复杂的对象中有许多成功的应用。
经典的PID 控制算法虽然不能完全满足现代工业生产的控制要求,但因其具有直观、实现简单、鲁棒性好等一系列优点,在很多领域仍然被广泛使用。
针对上述情况,本文将具有前向结构的BP 神经网络与常规PID 算法相结合,设计了神经网络PID 控制系统,并在先进的虚拟仪器开发软件LabVIEW 中进行了仿真研究。
2水箱液位的神经网络PID 控制系统图1是神经网络PID 控制系统的原理示意图。
系统由控制器网络NNC 和辨识器网络NNI 组成。
工作时,系统首先对对象被控变量进行采样,一方面送给NNC 控制器计算偏差值、、即偏差的PID 值,利用NNC 的BP 网络计算控制信号;同时送给辨识器NNI 与接收到的一起按学习算法1对辨识器进行权值修正。
辨识器计算出被控变量的第步预测值与设定值进行比较后按照学习算法2对控制器NNC 进行权值修正,试图提前对系统各结构参数进行修正以得到更快的收敛速度和更好的控制效果。
各学习算法均以梯度下降法通过沿着误差平方和的最快下降方向连续调整网络的权值和阈值。
2.1单容水箱对象及其模型本文对象采用深圳固高公司的液位过程控制系统水箱实验装置,该对象原为三容装置,经适当设置成为单容装置,如图2所示。
系统主要包括电控箱、水箱本体及由AD/DA 数据采集卡和普通PC 机等。
水箱中的水由泵抽出经自动阀门2注入水柱,再经出水阀门1流回水箱形成循环。
电磁阀门2用于调节进水量,阀门1用于手动调节出水量。
因对象简单,建模过程此处不再详述。
采用机理建模的方法并考虑到电磁阀的非线性特性可得该对象的模型如式(1)所示:(1)电磁阀2在系统工作点分别为200mm 和300mm 附近时放大系数分别为和。
对象模型程序参见后续两个系统程序框图的对象模型部分。
图1神经网络PID 控制系统原理图图2单容水箱对象装置2.2神经网络PID 控制系统辨识器的设计辨识器网络NNI 采用三层网络。
辨识算法采用BP 算法。
匡芬芳:讲师硕士60--邮局订阅号:82-946360元/年技术创新控制系统《PLC 技术应用200例》您的论文得到两院院士关注网络的输入层有个神经元,和分别为对象输入和输出的阶次。
该层构成为(2)网络的隐含层元个数应满足即最小应为,其I/O 关系为(3)式中,为输入层到隐层的权系数;为隐层神经元阈值;为神经元作用函数,此处取为S 函数。
网络的输出层元个数为1,输出为(4)式中为隐层到输出层的权系数;为输出层神经元阈值。
辨识器的学习的性能指标为(5)采用BP 算法使J m 极小化的权系数调整规律为(6)式中,分别为学习修正率及惯性系数,其值(0,1)。
实现辨识器的LV 程序见图3辨识器部分(第Ⅲ部分)所示。
2.3神经网络PID 控制系统控制器的设计神经网络控制器NNC 为一个两层的线性BP 网络。
其输入有三个元,分别为(7)网络的输出为(8)式中,为权系数。
可见,控制器NNC 的输入层各节点输入分别是系统偏差、偏差积分值和微分值,具有PID 控制结构。
控制器参数的训练依使下述性能指标最小化进行(9)控制器系数的修正算式为(10)式中,,为(11)实现控制器的LV 程序见图3控制器部分(第Ⅱ部分)。
2.4水箱液位神经网络PID 控制系统的LV 实现水箱液位神经网络PID 控制系统总的LV 框图程序如图3所示,说明如下:第Ⅰ部分为各参数、权赋初始值;第Ⅱ部分是神经网络PID 控制器NNC;第Ⅲ部分是神经网络辨识器NNI;第Ⅳ部分是水箱模型;第Ⅴ部分是系统偏差显示、记录及程序运行控制等部分。
3系统控制效果实时控制时,除上述已给参数外还有:阈值、,动量系数,权的初始值在0~1之间任取。
系统启动并稳定后,在各工作点处通过让电磁阀的输入电压改变0.5V 给两系统分别加入干扰,下图4的(a)~(d)是液位期望值为200mm 和300mm 处时两种控制系统的控制结果。
从图中可以看出,不管在哪个工作点处,神经网络控制系统都比常规PID 控制系统具有更小的超调量、响应时间和更快的稳定速度,动态偏差也在更短的时间内得到控制,总体具有更好的控制质量。
图3水箱液位神经网络PID 控制系统程序框图(a)200mm 处常规PID 控制系统控制结果(b)200mm 处神经网络PID 控制系统控制结果61--技术创新《微计算机信息》(测控自动化)2010年第26卷第7-1期360元/年邮局订阅号:82-946《现场总线技术应用200例》控制系统(c)300mm 处常规PID 控制系统控制结果(d)300mm 处神经网络PID 控制系统控制结果图4不同工作点处两种控制系统的控制结果4结束语通过对单容水箱液位的神经网络PID 控制系统与常规PID 控制系统的控制结果进行比较,发现前者在稳定性、快速性和准确性方面都具有更好的效果,从而证实了它的优势,为过程对象的控制提供了一种新的思路。
今后可在建模、程序设计等方面进一步研究和完善。
本文作者创新点:将常用的PID 算法和先进的神经网络结构结合应用于单容液位对象的控制,并在虚拟软件LabVIEW 中实现。
参考文献[1]王永骥,涂健.神经元网络控制[M].机械工业出版社,1998.[2]戴敬等.LabVIEW 基础教程[M].国防工业出版社,2002.[3]任俊杰,李红星,李永霞,张益农.电热锅炉温度-液位双回路控制系统[J].微计算机信息,2009,5-1:31-32.作者简介:匡芬芳(1971-),女(汉族),湖南株洲人,湖南化工职业技术学院讲师,硕士,主要研究方向:过程控制、仿真技术。
Biography:KUANG Fen-fang (1971-),Male,Han,Hunan,Hunan Chemical Industry Vocation Technology Institute,Instructor,Master,Research area:Proccess control,Simulation technology.(412004株洲湖南化工职业技术学院)匡芬芳(Hunan Chemical Industry Vocation Technology Institute,Zhuzhou,412004,China)KUANG Fen-fang通讯地址:(412004湖南化工职业技术学院自动化系)匡芬芳(收稿日期:2009.08.27)(修稿日期:2009.11.27)(上接第75页)图2DAQ 系统实时采集的一路pH 值信号采用RS485工业总线技术将现场发酵设备与上位机连接起来,全过程实现了厌氧消化过程的实时数据自动采集与过程状态监控的目标,为厌氧消化过程的研究提供了充足的原始资料。
实际运行结果证明该系统易于操作,运行可靠,使用效果良好。
本文作者创新点:本文提出了一种基于PLC 的厌氧发酵过程DAQ 系统的设计及实现。
在软件程序设计上运用了先进的控制理论与方法,解决了复杂过程DAQ 系统的通讯问题,下位计算机采用了PLC 的语句表(STL)编程方法,来编写实时通讯程序与数据采集程序,其处理速度快于梯形图,相对于梯形图编程有更大的灵活性与扩展性。
本系统提出的DAQ 方案满足了厌氧发酵系统数据采集的要求,并且易于功能扩展和系统放大。
6致谢本篇论文是在“十一五”国家科技支撑计划重大项目(2008BADC4B18)、“十一五”国家科技支撑计划重大项目(2008BADC4B06)及山东省科技攻关计划(2008GG20007003)资助下完成的。
在此感谢清华大学环境科学与工程系王凯军教授、瑞典隆德大学生物技术系刘京研究员以及青岛天人环境工程有限公司行业同仁在整个实验实施及论文撰写过程中提供建议与大力支持。
参考文献[1]S7-200可编程控制器系统手册[R],SIEMENS Co.,Ltd,2000,3[2]朱清慧,王志奎.上位机与PLC 实现立体仓储交互控制系统[J].微计算机信息,2007,5-1:66-68[3]Pcomm Library Programming Guide 2[R].MOXA Technologies Co.,Ltd,1998[4]Measurement Studio User Manual v8.5[R].National Instruments Corporation,2008作者简介:朱玉伟(1974-),男,山东费县人,工程师,工学硕士。