直流自动控制系统B卷 薄涛
直流自动控制系统B卷薄涛资料
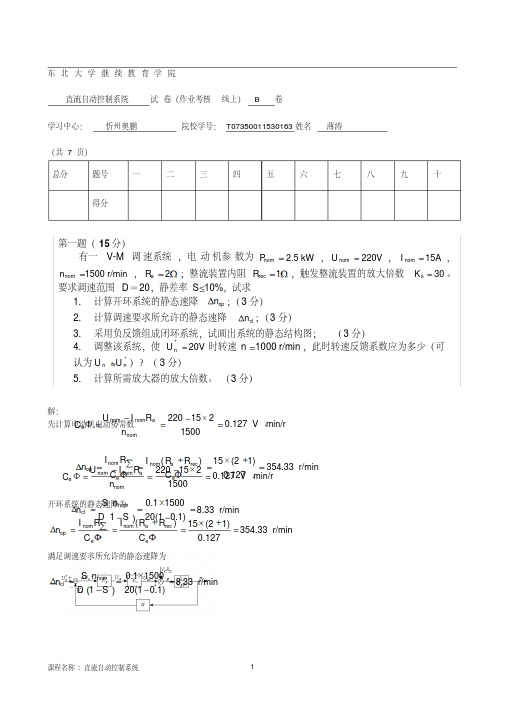
东北大学继续教育学院直流自动控制系统试卷(作业考核线上) B卷学习中心:忻州奥鹏院校学号:T07350011530163姓名薄涛(共 7页)总分题号一二三四五六七八九十得分解:先计算电动机电动势常数220152Φ0.127 Vmin/r 1500nom nom a e nom U I R C n 开环系统的静态速降为()15(21)354.33 r/min0.127nom nom a rec opeeI R I R R n C C 满足调速要求所允许的静态速降为0.115008.33 r/min120(10.1)nom clS n n D S第一题(15分)有一V-M 调速系统,电动机参数为nom2.5 kW P ,nom 220V U ,nom15A I ,nom1500 r/min n ,a2R ;整流装置内阻rec1R ,触发整流装置的放大倍数s30K 。
要求调速范围D =20,静差率S 10%,试求1.计算开环系统的静态速降op n ;(3分)2.计算调速要求所允许的静态速降cl n ;(3分)3.采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)4.调整该系统,使*n 20V U 时转速1000 r/min n ,此时转速反馈系数应为多少(可认为*nnU U )?(3分)5.计算所需放大器的放大倍数。
(3分)220152Φ0.127 V min/r1500nom nom ae nomU I R C n ()15(21)354.33 r/min0.127nom nom a rec ope e I R I R R n C C 0.115008.33 r/min120(10.1)nom cl S n n D S采用转速负反馈系统的稳态结构图1. 第二题(20分)某调速系统如下图所示,已知数据为:电动机参数为nom30kWP,nom220VU,nom157.8AI,nom1000 r/minn,a0.1R;整流装置内阻rec0.3R,触发整流装置的放大倍数s40K;最大给定电压*nm12VU,当主电路电流最大时,整定im45VU。
直流自动控制系统B卷谭树彬(2)

调节时间 。
(4)用PID调节器校正时,其传递函数为
取 , ,令 ,则按二阶典型系统校正后系统开环传递函数为
同样,取 ,则
调节时间 。
比较采用不同调节器的ts,可知采用PID调节器调节时间最短,效果最好;采用I调节器调节时间最长,效果最差;采用P调节器和PI调节器虽然有相同的调节时间,但采用P调节器时,系统是有差系统,因此两者的稳态性能是截然不同的。
东北大学继续教育学院
直流自动控制系统试卷(作业考核线上)B卷
学习中心:院校学号:姓名
(共3页)
总分
题号
一
二
三
四
五
六
七
八
九
十
得分
解:
1)
2)当 时, 代入
3)
由 ,得
4)当 V时,则有
所以 V/A
5)
6) V
解:
(1)用P调节器校正时,调节器传递函数为
需近似处理后才能校正成为二阶典型系统
则校正后系统开环传递函数为
(2)
转速环小时间常数为
转速调节器ASR的传递函数为
按对称三阶系统设计,取对称最佳参数 ,则转速环开环放大倍数:
转速调节器参数选择为
积分时间常数:
比例放大系数:
对近似条件进行如下校验:
转速环的截止频率为
电流环传递函数简化条件( )
满足近似处理条件。
转速环小时间常数近似处理条件( )
满足近似处理条件。
选择ASR输入电阻
则ASR的反馈电阻和电容可计数如下:
,实取
滤波电容为
(3)
转速环按对称三阶系统设计,取对称最佳参数 , ,基值为:
所以,带 额定负载启动到额定转速时的超调量为:
《电力拖动自动控制系统》辅导

《电力拖动自动控制系统》辅导《电力拖动自动控制系统》是工业自动化专业的主要专业课之一。
本课程教材采用陈伯时主编的《电力拖动自动控制系统》(修订版)。
本课程的教学内容分为二大部分。
第一部分是以直流电动机为控制对象的直流拖动控制系统,主要包括教材中第二章至第五章,介绍直流拖动自动控制系统的基本概念、基本组成环节和基本控制规律及自动控制系统中调节器的工程设计方法。
第二部分是以交流电动机为控制对象的交流拖动系统,主要包括教材中第六章至第八章,主要对交流拖动系统中的一些基本理论、基本环节和控制规律进行了分析。
为便于同学们复习,下面给出各章复习要求,并提供一份模拟练习题。
第一部分:复习要求第一章结论【本章重点】1. 电力拖动控制系统的基本类型:1) 直流电机拖动控制系统的基本类型;2) 交流电机拖动控制系统的基本类型。
2. 现代电力拖动控制系统的物质基础。
第二章闭环控制的直流调速系统【本章重点】1. 转速控制的要求和调速指标:l)调速范围 D ;2)静差率 S3)调速范围、静差率和额定速降之间的关系。
2.闭环调速系统的组成,静特性的含义,转速负反馈闭环调速系统的稳态结构图。
3.开环系统机械特性与闭环系统静特性的比较。
4.闭环系统能够减少稳态速降的实质。
5.反馈控制规律(转速反馈闭环调速系统的三个基本特性)。
6.反馈控制闭环直流调速系统的稳态参数计算。
7.截流反馈的概念,电流截止负反馈环节的特点,以及带电流截止负反馈的闭环直流调速系统的稳态结构图和静特性。
8.反馈控制闭环调速系统的动态数学模型的建立、动态结构图、传递函数、以及稳定条件。
9. PI 调节器的设计。
10.无静差调速系统的含义,积分控制规律的含义、结构。
积分调节器与比例调节器的区别。
比例控制、积分控制和比例积分控制规律的区别。
11.无静差直流调速系统的分析及稳态参数计算。
第三章多环控制的直流调速系统与调节器的工程设计方法【本章重点】1.转速、电流双闭环直流调速系统的组成,主要包括:双闭环直流调速系统的原理框图和稳态结构图。
直流自动控制系统B卷谭树彬

东 北 大 学 继 续 教 育 学 院直流自动控制系统 试 卷(作业考核 线上) B 卷学习中心:济南市博文教育学习中心(东大本部) 院校学号:072N16030233 姓名: 边洪亮(共 4 页)第一题(14分)带有电流截止负反馈的单闭环调速系统,电动机参数为:U nom =220V ,I nom =32A ,n nom =1350rpm ,电枢电阻R a =0.66Ω,整流装置K s =30,电枢回路总电阻R ∑=0.8Ω,生产机械要求:调速范围D =30,静差率S ≤0.11. 画出系统静态结构图;2. 求开环系统静态速降∆n op ,调速要求所允许的静态速降∆n cl ; 3. 当给定电压U n *=10V 时,n =n nom ,求闭环系统开环放大倍数K ,调节器的放大倍数K P ,速度反馈系数α;4. 若截止电压U com =9V ,堵转电流I dbL =2.2I nom ,求电流反馈系数β,截止电流I dcr ;解:12nom nom a 220320.660.147V min/r 1350e nom U I R C n Φ--⨯==≈⋅nom op 320.8174.15r/min 0.147e R I n C Φ∑⋅⨯∆===nomcl (1)S n D n S ⋅=∆-nom cl 0.113501355r/min (1)30(10.1)27S n n D S ⋅⨯∴∆====--3当*n 10V U =时,nom 1350rpm n n ==代入n U n α=100.0074V min/r 1350n nom U n α*≈=≈⋅op cl174.151133.835n K n ∆=-=-=∆ p s e K K K C αΦ⋅⋅=p s 33.830.14722.4300.0074e K C K K Φα⋅⨯∴==≈⋅⨯4当电动机堵转时0n =*p s n com dbL p s ()K K U U I R K K β∑⋅⋅+=+⋅⋅1090.82.23222.4300.27/n comdbL p SR U U I K K V A β*∑+∴=-+=-⨯⨯≈ nomdbr 933.330.27U I A β=== 或忽略R ∑com dbL ()1090.27/2.232n U U V A I β*++≈=≈⨯第二题(25分)转速、电流双闭环无静差调速系统,电动机nom 220V U =,nom 20A I =,nom 1000rpm n =,整流装置内阻rec 0.5R =Ω,电动机电枢电阻a 0.5R =Ω,电动机过载倍数2λ=,整流装置放大倍数s 24K =,系统最大给定电压、速度调节器的限幅值与电流调节器的输出限幅值**nm im ctm 10V U U U ===,:1.求以下各量(3分,每个小问题1分)(1)*nm 100.01V/r/min 1000/minnom U V n r α=== (2)**im im nom 10V 0.25V/A 220Adm U U I I βλ====⨯(3)nom nom a 220200.50.21V min/r 1000e nom U I R C n Φ--⨯===⋅2.当电动机在额定负载、额定转速下稳定运行时,求如下各量:(3分,每个小问题1分)(1)*i U =U i =βI nom =0.25⨯20=5V(2)()nom nom d00.211000200.50.59.583V 24e ct s s C n I R U U K K Φ∑⨯+⨯++====或d0nom nom 220200.59.58V 24rec ct s s U U I R U K K ++⨯==== (3)n U = U *n = 10 V3.电动机在额定状态下运行时,转速反馈线突然断开, 求稳态时各量:(4分,每个小问题1分)(1)**i im 10U U V ==(2)i 0.25205nom U I V β==⨯=(3)ct 10ctm U U V == (4)()d0nom nom 2410200.50.51047.62rpm 0.21s ct e e U I R K U I R n C C ΦΦ∑∑⨯-⨯+--====4.当电动机发生堵转时,求系统稳态时如下各量:(5分,每个小问题1分)(1)**i im 10U U V ==(2)i U =10 V(3)()nom 2200.50.5 1.67V 24ct sI R U K λ∑⨯⨯+===(4)n U =0V(5)0nom 2201=40V d U I R λ∑==⨯⨯第三题(20分)逻辑控制的无环流电枢可逆调速系统,由正向运转到停车的电流波形如下图:(每小题2分) 1. 在下表中添上正、反组变流器与电动机在相应时间段所处的状态。
一种直流牵引馈电区段域保护方法

一种直流牵引馈电区段域保护方法韩志伟;董杰;屠黎明;李海涛【摘要】为了解决地铁直流馈线保护仅仅利用单端数据,从而在远端故障时保护动作时间长、易发生拒动或误动问题,分析了馈电区段两侧电流与线路(负荷)电流的分布关系,提出了利用独立馈电区段双端电量数据的一种“区段域保护”方法,将独立馈电区段内两端的各种保护测量数据通过光纤等通信手段实现采集数据的同步共享、进行综合域处理(计算)后实现全新的保护判据。
给出了独立馈电区段的构成原则,提出了利用两端电流之和的“和电流”保护原理、阻抗保护原理、双端联跳原理。
最后,给出了具体实现方法。
该方法可实现直流馈线全线速动,提高了地铁直流供电系统保护的快速性、灵敏性和可靠性。
【期刊名称】《电力系统保护与控制》【年(卷),期】2012(000)022【总页数】4页(P135-138)【关键词】地铁直流保护;轨道交通;直流牵引;电流上升率;电流增量【作者】韩志伟;董杰;屠黎明;李海涛【作者单位】北京市轨道交通建设管理有限公司,北京 100037;北京四方继保自动化股份有限公司,北京 100085;北京四方继保自动化股份有限公司,北京 100085;北京四方继保自动化股份有限公司,北京 100085【正文语种】中文【中图分类】TM770 引言如图1所示,地铁直流供电系统由牵引变电所B、馈电线路K、接触网J、电动机车C、钢轨G、回流线路H、电分段D组成。
直流电源正极经馈电线K、接触网J、机车C、钢轨G、回流线H回到电源负极。
接触网被电分段D分隔成不同的馈电区段。
每个馈电区段由两侧的牵引变电所双端供电。
相邻馈电区段通过馈电线 K经由牵引变电所直流正母线构成电气连接。
图1 地铁直流供电系统示意图Fig. 1 Schematic of metro DC power supply system目前,地铁直流供电系统的主要保护算法,例如,电流速断保护、过流保护、电流变化率结合电流增量保护,等等,都是利用单端电流(即某一侧的电流)来实现的[1-3]。
一种直流保护系统及其控制方法[发明专利]
![一种直流保护系统及其控制方法[发明专利]](https://img.taocdn.com/s3/m/8ef80f6e8762caaedc33d45c.png)
专利名称:一种直流保护系统及其控制方法
专利类型:发明专利
发明人:汤奕,刘增稷,杜先波,李辰龙,范子恺,谭敏刚,蒋琛,徐钢,喻建
申请号:CN201710563665.7
申请日:20170712
公开号:CN107276052A
公开日:
20171020
专利内容由知识产权出版社提供
摘要:本发明公开了一种直流保护系统及其控制方法,包括直流保护器、断路器、直流母线和直流负载,直流保护器通过断路器与直流母线连接,直流保护器与直流负载连接,直流保护器无线通信连接有调度中心服务器,直流保护器包括保护控制模块、功率模块、监测模块、报警显示模块和通信模块,功率模块包括隔离模块、旁路模块和电池供电模块,保护控制模块分别与功率模块、监测模块、报警显示模块和通信模块连接,隔离模块与旁路模块并联,所述电池供电模块与隔离模块连接;本发明避免了直流负载向直流母线注入交流分量,当直流母线发生故障时,可以通过蓄电池供电,减少了直流负载断电的可能性,提高了直流系统的稳定性。
申请人:江苏方天电力技术有限公司,东南大学,国网江苏省电力公司,国家电网公司
地址:211102 江苏省南京市江宁科学园天元中路19号
国籍:CN
代理机构:南京钟山专利代理有限公司
代理人:戴朝荣
更多信息请下载全文后查看。
电力拖动自动控制系统(陈伯时)ppt1-2-3直流拖动控制系统

n
2U 2
cos[sin(
6
)
sin(
6
)ectg
]
Ce (1 ectg )
(1-10)
Id
3 2U2
2R
[cos(
6
) cos(
6
)
Ce n]
2U 2
式中 arctg L ; — 一个电流脉波的导通角。
R
89电电力力拖传动动自控动制控系制统系统
21
(3)电流断续机械特性计算
当阻抗角 值已知时,对于不同的控制 角 ,可用数值解法求出一族电流断续时的
1
LP
VT
T
c1
2
c2
L
b1 a1
b2 M
a2
并联多重联结的12脉波整流电路
89电电力力拖传动动自控动制控系制统系统
17
1.2.4 晶闸管-电动机系统的机械特性
当电流连续时,V-M系统的机械特性方程式为
n
1 Ce
(U d0
Id R)
1 Ce
m ( π Um
sin
π m
cos
Id R)
(1-9)
式中 Ce = KeN —电机在额定磁通下的电动势系数。 式(1-9)等号右边 Ud0 表达式的适用范围如第1.2.1节
R— 主电路等效电阻;
且有 R = Rrec + Ra + RL;
89电电力力拖传动动自控动制控系制统系统
8
对ud0进行积分,即得理想空载整流电 压平均值Ud0 。
用触发脉冲的相位角 控制整流电压的平 均值Ud0是晶闸管整流器的特点。
Ud0与触发脉冲相位角 的关系因整流电
路的形式而异,对于一般的全控整流电路,
直流自动控制系统B卷谭树彬(2)

东 北 大 学 继 续 教 育 学 院直流自动控制系统 试 卷(作业考核 线上) B 卷学习中心: 院校学号 姓名(共 3 页)解:1. 先计算电动机电动势常数220152Φ0.127 V min/r 1500nom nom a e nom U I R C n --⨯===⋅ 开环系统的静态速降为 ()15(21)354.33 r/min 0.127nom nom a rec op e e I R I R R n C C ∑+⨯+∆====ΦΦ2. 满足调速要求所允许的静态速降为 ()0.115008.33 r/min 120(10.1)nom cl S n n D S ⋅⨯∆===--3. 采用转速负反馈系统的稳态结构图第一题(15分)有一V -M 调速系统,电动机参数为nom 2.5 kW P =,nom 220V U =,nom 15A I =,nom 1500 r/min n =,a 2R =Ω;整流装置内阻rec 1R =Ω,触发整流装置的放大倍数s 30K =。
要求调速范围D =20,静差率S ≤10%,试求 1. 计算开环系统的静态速降op n ∆;(3分)2. 计算调速要求所允许的静态速降cl n ∆;(3分)3. 采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)4. 调整该系统,使*n20V U =时转速1000 r/min n =,此时转速反馈系数应为多少(可认为*n n U U ≈)?(3分)5. 计算所需放大器的放大倍数。
(3分)4. 当*nU =20V 时,n nom =1000r /min ,则转速反馈系数为*200.02 V min/1000n n nom nom U U rn n α=≈==g5. 闭环系统的放大倍数为 s pop e cl354.331141.548.33α∆==-=-=Φ∆K K n K C n 则所需的放大器放大系数为41.540.1278.79300.02αΦ⨯===⨯e p s KC K K解:1.第二题(20分)某调速系统如下图所示,已知数据为:电动机参数为nom 30kW P =,nom 220V U =,nom 157.8A I =,nom 1000 r/min n =,a 0.1R =Ω;整流装置内阻rec 0.3R =Ω,触发整流装置的放大倍数s 40K =;最大给定电压*nm12V U =,当主电路电流最大时,整定im 45V U =。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东 北 大 学 继 续 教 育 学 院
直流自动控制系统 试 卷(作业考核 线上) B 卷
学习中心: 忻州奥鹏 院校学号:T030163姓名 薄涛
(共 7页)
解:
先计算电动机电动势常数 220152
Φ0.127 V min/r 1500
nom nom a e nom U I R C n --⨯=
==⋅
开环系统的静态速降为
()15(21)354.33 r/min 0.127
nom nom a rec op e e I R I R R n C C ∑+⨯+∆=
===ΦΦ 满足调速要求所允许的静态速降为
()0.11500
8.33 r/min 120(10.1)
nom cl S n n D S ⋅⨯∆=
==--
第一题(15分) 有一V-M 调速系统,电动机参数为nom 2.5 kW P =,nom 220V U =,nom 15A I =,
nom 1500 r/min n
=,a 2R =Ω;整流装置内阻rec 1R =Ω,触发整流装置的放大倍数s 30K =。
要求调速范围D =20,静差率S 10%,试求 1. 计算开环系统的静态速降op n ∆;(3分) 2. 计算调速要求所允许的静态速降cl n ∆;(3分) 3. 采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)
采用转速负反馈系统的稳态结构图
1.
第二题(20分)
某调速系统如下图所示,已知数据为:电动机参数为
nom
30kW
P=,
nom
220V
U=,nom
157.8A
I=,
nom
1000 r/min
n=,
a
0.1
R=Ω;整流装置内阻
rec
0.3
R=Ω,触发整流装置
的放大倍数
s
40
K=;最大给定电压*
nm
12V
U=,当主电路电流最大时,整定
im
45V
U=。
系统的设计指标为:D=20,S=10%, 1.5
dbL nom
I I
=, 1.1
dcr nom
I I
=。
1. 画出系统的静态结构图;(4分)
2. 计算转速反馈系数;(3分)
3. 计算放大器放大倍数;(4分)
4. 计算电流反馈系数;(3分)
5. 当
20k
R=Ω时,求
1
R的数值;(3分)
6. 计算稳压管的击穿电压
com
U。
(3分)
解: 1.
2. 当*
nm 12V U =时,nom 1000r/min n n ==代入n U n α=
120.012V min/r 1000
n nom U n α*≈=≈⋅
3. nom nom a 220157.80.1
0.204V min/r 1000
e nom U I R C n Φ--⨯=
=≈⋅
nom op (0.10.3)157.8309.41r/min Φ0.204e R I n C ∑⋅+⨯∆=
==
由nom
cl (1)
S n D n S ⋅=
∆- ,得
nom cl 0.11000100
5.56r/min (1)20(10.1)18
S n n D S ⋅⨯∆=
===-⨯-
op cl
309.41
1154.655.56
n K n ∆=
-=
-=∆ p s e K K K C αΦ
⋅⋅=
p s Φ54.650.204
23.23400.012
e K C K K α⋅⨯=
=≈⋅⨯
4. 当45im U = V 时,则有 所以45
0.191.5 1.5157.8
im im dbL nom U U I I β≈
===⨯ V/A 5. 1
100
23.2320464.6k p p R K R K R R =
⇒==⨯=Ω 6. 0.19 1.10.084 1.1157.832.98com dcr nom U I I β==⨯=⨯⨯= V
T=T 2+T 3+T 4=,则按典型Ⅰ型系统校正时系统的开环传递函数为,同样,取,则,调节时间t s ≈6T=6×=。
c .用PID 调节器校正时,其传递函数为,取τ1=T 1=,τ2=T 2=,令T=T 3+T 4=+=,则按典型Ⅰ型系统校正时系统的开环传递函数为
同样取,则τ=2K 1T=2×2×=,调节时间t s ≈6T=6×=。
比较采用不同调节器的t s ,可见用PID 调节器校正效果最好。
$a .用PI 调节器校正时,由于控制对象传递函数中不含积分环节,故需作近似处理后才能校正成典型Ⅱ型系统。
令,则校正后系统的开环传递函数
为式中,T=T 2+T 3+T 4=。
下面需要校验近似条件是否满足。
因式中,。
当h=4时,;当h=3时,ωc ==,而,显然不满足近似条件,所以不能用PI 调节器将系统校正成典型Ⅱ型系统。
b .用PID 调节器校正时,系统的开环传递函数为 取τ2=T 2,令T=T 3+T 4=+=,。
则开环传递函数近似为 需校验近似条件。
此时,当h=4时,,当h=10时,。
可见,满足近似条件,所以可以用PID 调节器将系统校正成典型Ⅱ型系统。
设计要求:
1. 电流环按二阶典型系统设计(取工程最佳参数1
2K T
=
),请计算电流调节器参数(不要求计算电阻电第四题(45分)
某晶闸管供电的双闭环直流调速系统,变流装置采用三相全控桥式整流电路,已知如下数据:
直流电动机:220nom U V = ,624nom I A =,750/min nom n r = , 0.278e C Φ=, 1.5I λ=; 变流装置:38s K =,0.0017s T s =; 电枢回路总电阻:0.05R ∑=Ω; 时间常数:10.06T s =,0.08m T s =;
电流反馈: 0.008/(5/)nom V A V I β=≈,00.002i T s = 转速反馈:0.013min/(10/)nom V r V n α=≈,0.005on T s = 设计要求:
1. 电流环按二阶典型系统设计(取工程最佳参数1
2K T
=
),请计算电流调节器参数(不 要求计算电阻电容值);(20分)
2. 转速环按对称三阶系统设计(取对称最佳参数4h =,/%88.5%m c Z ∆=),请计
容值);
i
为了让调节器零点与控制对象的大时间常数极点对消,选择τi =T l = 则电流环的动态结构图便成为 其中
i s I i K K K R
βτ=
电枢回路电磁时间常数 T l =。
检查对电源电压的抗扰性能:
22.160037
.006.0==∑i l T T ,因而各项指标都是可以接受的。
s T K i 1.1350037
.05
.05.0===
∑ ACR 的比例系数为33.1008
.03805
.006.01.135=⨯⨯⨯=
=β
τS i i K R K K
检验近似条件
电流环截至频率:1
1.135-==s K w ci 机电时间常数s T m 08.0=
(s )
2. 转速环按对称三阶系统设计(取对称最佳参数4h =,/%88.5%m c Z ∆=),请计算转速调节器参数
(不要求计算电阻电容值); 解:电流环等效闭环传递函数为
111
*
)
()(d +=
S K
U
I s i s β
其中电流环等效时间常数
s s T K
0074.00037.0221
i =⨯==∑ 则转速环节小时间常数
s T K
T on n
0124.0005.00074.01
=+=+=∑ 选用PI 调节器,其传递函数为
s
s K W n n n S ASR ττ)1()
(+=
ASR 的超前时间常数为 τn = h n T ∑=4*=
转速开环增益
36.6500124
.0525212222=⨯⨯=+=∑n N T h h K
r V n I R U C N N a N e min 252.0750
624
05.0220⋅=⨯-=-=
ASR 的比例系数
16.30124
.005.0013.04208
.0278.0008.052)1(2
=⨯⨯⨯⨯⨯⨯⨯=+=∑n m e n RT h T C h K αβ
检验近似条件
转速环截止频率
11
25.3236.6500496.0-=⨯===s K w K w N n n
cn τ
1)电流环传递函数简化条件为
cn
i I w s T K φ17.630037
.01
.1353131-==∑
满足简化条件。
2)转速环小时间常数近似处理条件为
cn on I w s T K φ179.54005
.01
.1353131-==
满足简化条件。