直流自动控制系统B卷谭树彬(2)
提升机直流电控系统零速制动功能的实验专业技术方案研究及应用

提升机直流电控系统零速制动功能的实验方案研究及应用-工程论文提升机直流电控系统零速制动功能的实验方案研究及应用江善清JIANG Shan-qing(山钢集团山东金岭矿业技术中心,淄博255081)(Technology Center of Shandong Jinling Mining Co.,Ltd.,Shandong Iron Steel Group,Zibo 255081,China)摘要:通过对电控系统的硬件设施和软件程序进行设定,找出一种方式在模拟零速状态下进行操作,实现制动减速过慢时的及时投入辅助制动的效果,同时在实际情况下进行验证。
Abstract:Through setting the hardware and software program of electronic control system,this paper hopes to figure out a way of operating in the condition of simulation zero speed to realize the effect of timely auxiliary braking when the braking deceleration is too slow and validated that in actual situation.关键词:零速制动;实验;应用Key words:zero speed braking;experiment;application中图分类号:TD63 文献标识码:A文章编号:1006-4311(2015)25-0106-02作者简介:江善清(1983-),男,山东菏泽人,本科,现任山钢集团山东金岭矿业技术中心副主任工程师,中级职称,负责电气技术管理与设计、研发工作。
0 引言矿山生产对提升工艺及安全保护都有特殊的要求,这就决定了矿井提升机电控设备是安全生产的关键设备。
东大14秋直流自动控制系统B卷谭树彬(2)答案

课程名称: 直流自动控制系统
1 东 北 大 学 继 续 教 育 学 院
直流自动控制系统 试 卷(作业考核 线上) B 卷
学习中心: 院校学号: 姓 名:
(共 3 页)
解:
1. 先计算电动机电动势常数
220152
Φ0.127 V m i n /r
1500
nom nom a e nom U I R C n --⨯===⋅ 开环系统的静态速降为
()15(21)354.33 r/min 0.127
nom nom a rec op e e I R I R R n C C ∑+⨯+∆====ΦΦ
2. 满足调速要求所允许的静态速降为
第一题(15分)
有一V-M 调速系统,电动机参数为nom 2.5 kW P =,nom 220V U =,nom 15A I =,nom 1500 r/min n =,a 2R =Ω;整流装置内阻rec 1R =Ω,触发整流装置的放大倍数s 30K =。
要求调速范围D =20,静差率S ≤10%,试求
1. 计算开环系统的静态速降op n ∆;(3分)
2. 计算调速要求所允许的静态速降cl n ∆;(3分)
3. 采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)
4. 调整该系统,使*
n 20V U =时转速1000 r/min n =,此时转速反馈系数应为多少(可
认为*n n U U ≈)?(3分)
5. 计算所需放大器的放大倍数。
(3分)。
自动控制系统优秀教案
学
过
程
一般电动状态的电压、电流波形 制动状态的一个周期分为两个工作阶段: 在 0 ≤ t ≤ ton 期间,VT2 关断,-id 沿回路 4 经 VD1 续流,向电 源回馈制动,与此同时, VD1 两端压降钳住 VT1 使它不能导通。 在 ton ≤ t ≤ T期间, Ug2 变正, 于是VT2导通, 反向电流 id 沿回路 3 流 通,产生能耗制动作用 (二)直流PWM调速系统的机械特性 由于采用脉宽调制,严格地说,即使在稳态情况下,脉宽调速系统的转矩和转 速也都是脉动的,所谓稳态,是指电机的平均电磁转矩与负载转矩相平衡的状态,
s
于是,最低转速为
nN nN n0 min nmin nN
nmin
而调速范围为
nN (1 s)nN nN s s
D
nmax n N nmin nmin
将上面的式代入 nmin,得
(1-34)
D
nN s nN (1 s )
教
学
式(1-34)表示调压调速系统的调速范围、静差率和额定速降之间所应满足的 关系。对于同一个调速系统, nN 值一定,由式(1-34)可见,如果对静差率要 求越严,即要求 s 值越小时,系统能够允许的调速范围也越小。 结论1: 一个调速系统的调速范围,是指在最低速时还能满足所需静差率的转速 可调范围。 例题1-1 某直流调速系统电动机额定转速为,额定速降 nN = 115r/min,当要求 静差率30%时,允许多大的调速范围?如果要求静差率20%,则调速范围是多少? 如果希望调速范围达到10,所能满足的静差率是多少? 解 要求30%时,调速范围为
教 (2)有制动的不可逆PWM变换器电路 工作状态与波形 一般电动状态: 在一般电动状态中, 始终为正值 (其正方向示于图1-17a中) 。 设ton为VT1的导通时间,则一个工作周期有两个工作阶段: 在0 ≤ t ≤ ton期间, Ug1为正,VT1导通, Ug2为负,VT2关断。此时, 电源电压Us加到电枢两端,电流 id 沿图中的回路1流通。 在 ton ≤ t ≤ T 期间, Ug1和Ug2都改变极性,VT1关断,但VT2却不能立 即导通,因为id沿回路2经二极管VD2续流,在VD2两端产生的压降给VT2施加反 压,使它失去导通的可能。
自动控制原理胡寿松主编课后习题答案详解
6
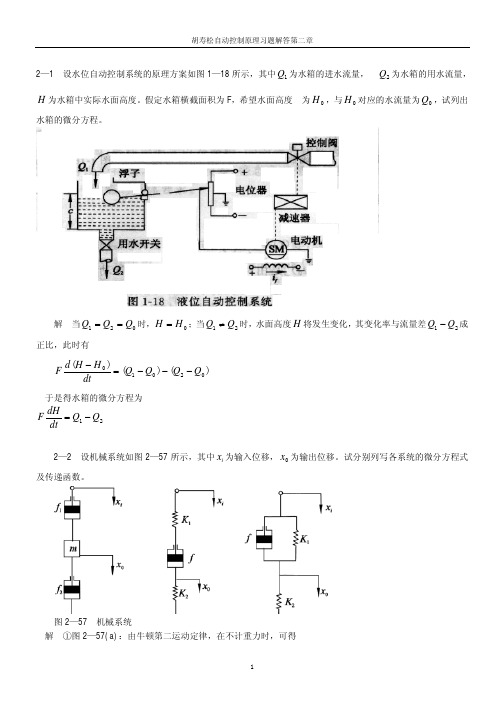
胡寿松自动控制原理习题解答第二章
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 ed − Ed0 cosα 0 = K s (α − α 0 )
其中 K s
=
ded dα
α =α
= −Ed 0 sinα 0
2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应 c(t) = 1 − e−2t + e−t ,试求系统的传递函数和脉冲
K 2 x0 = f (x& − x&0 )
消去中间变量 x,可得系统微分方程
f (K1
+
K
2
)
dx0 dt
+
K1K2 x0
=
K1 f
dxi dt
对上式取拉氏变换,并计及初始条件为零,得系统传递函数为
ቤተ መጻሕፍቲ ባይዱ
X 0 (s) =
fK1s
X i (s) f (K1 + K2 )s + K1K2
③图 2—57(c):以 x0 的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
K 2 (xi − x0 ) + f 2 (x&i − x&0 ) = f1 (x&0 − x&) (1)
K1x = f1 (x&0 − x&) (2)
所以 K 2 (xi − x0 ) + f 2 (x&i − x&0 ) = K1x (3)
对(3)式两边取微分得
电力拖动自动控制系统(陈伯时)ppt1-2-3直流拖动控制系统

n
2U 2
cos[sin(
6
)
sin(
6
)ectg
]
Ce (1 ectg )
(1-10)
Id
3 2U2
2R
[cos(
6
) cos(
6
)
Ce n]
2U 2
式中 arctg L ; — 一个电流脉波的导通角。
R
89电电力力拖传动动自控动制控系制统系统
21
(3)电流断续机械特性计算
当阻抗角 值已知时,对于不同的控制 角 ,可用数值解法求出一族电流断续时的
1
LP
VT
T
c1
2
c2
L
b1 a1
b2 M
a2
并联多重联结的12脉波整流电路
89电电力力拖传动动自控动制控系制统系统
17
1.2.4 晶闸管-电动机系统的机械特性
当电流连续时,V-M系统的机械特性方程式为
n
1 Ce
(U d0
Id R)
1 Ce
m ( π Um
sin
π m
cos
Id R)
(1-9)
式中 Ce = KeN —电机在额定磁通下的电动势系数。 式(1-9)等号右边 Ud0 表达式的适用范围如第1.2.1节
R— 主电路等效电阻;
且有 R = Rrec + Ra + RL;
89电电力力拖传动动自控动制控系制统系统
8
对ud0进行积分,即得理想空载整流电 压平均值Ud0 。
用触发脉冲的相位角 控制整流电压的平 均值Ud0是晶闸管整流器的特点。
Ud0与触发脉冲相位角 的关系因整流电
路的形式而异,对于一般的全控整流电路,
直流自动控制系统B卷谭树彬(2)

东 北 大 学 继 续 教 育 学 院直流自动控制系统 试 卷(作业考核 线上) B 卷学习中心: 院校学号 姓名(共 3 页)解:1. 先计算电动机电动势常数220152Φ0.127 V min/r 1500nom nom a e nom U I R C n --⨯===⋅ 开环系统的静态速降为 ()15(21)354.33 r/min 0.127nom nom a rec op e e I R I R R n C C ∑+⨯+∆====ΦΦ2. 满足调速要求所允许的静态速降为 ()0.115008.33 r/min 120(10.1)nom cl S n n D S ⋅⨯∆===--3. 采用转速负反馈系统的稳态结构图第一题(15分)有一V -M 调速系统,电动机参数为nom 2.5 kW P =,nom 220V U =,nom 15A I =,nom 1500 r/min n =,a 2R =Ω;整流装置内阻rec 1R =Ω,触发整流装置的放大倍数s 30K =。
要求调速范围D =20,静差率S ≤10%,试求 1. 计算开环系统的静态速降op n ∆;(3分)2. 计算调速要求所允许的静态速降cl n ∆;(3分)3. 采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)4. 调整该系统,使*n20V U =时转速1000 r/min n =,此时转速反馈系数应为多少(可认为*n n U U ≈)?(3分)5. 计算所需放大器的放大倍数。
(3分)4. 当*nU =20V 时,n nom =1000r /min ,则转速反馈系数为*200.02 V min/1000n n nom nom U U rn n α=≈==g5. 闭环系统的放大倍数为 s pop e cl354.331141.548.33α∆==-=-=Φ∆K K n K C n 则所需的放大器放大系数为41.540.1278.79300.02αΦ⨯===⨯e p s KC K K解:1.第二题(20分)某调速系统如下图所示,已知数据为:电动机参数为nom 30kW P =,nom 220V U =,nom 157.8A I =,nom 1000 r/min n =,a 0.1R =Ω;整流装置内阻rec 0.3R =Ω,触发整流装置的放大倍数s 40K =;最大给定电压*nm12V U =,当主电路电流最大时,整定im 45V U =。
交直流电力系统的分析和控制
交直流电力系统的分析和控制交直流电力系统的分析和控制周孝信目录1.概述2.换流器的工作原理和基本方程式3.两端直流输电系统的控制和稳态运行方式4.交直流混合电力系统的标幺值系统5.交直流电力系统潮流计算6.交直流电力系统稳定计算中直流输电系统的数学模型7.交直流电力系统暂态稳定计算程序及算例8.交直流并列电力系统暂态和动态稳定分析和控制9.交直流并列电力系统的次同步谐振(SSR)分析和控制10.参考文献交直流电力系统的分析和控制周孝信(中国电力科学研究院,北京100085)1 概述自19世纪末三相交流电力问世以来,交流电以其巨大的优越性使其在发电和输配电方面都居于独占地位。
近几十年来,交流电力系统规模越来越大,输电电压越来越高,电网的互联也日趋复杂。
与此同时也产生了一些复杂的技术问题如稳定问题等需要解决。
在这个过程中,人们又回过头来想到能否利用直流输电的优点,在某些特定条件下加以应用,以克服交流输电在技术上的困难,或者取得经济上的更加节省。
首先,直流输电线路的造价比较低。
尽管两端换流站造价较高,但对远距离输电来说,当输电线长度超过某一临界数值时,其总造价将比交流输电低。
又如海底电缆输电,由于直流电通过电缆不需要充电电流,因而可传输更大的功率。
此外,直流输电不存在通常交流输电的稳定问题,在交流系统稳定问题非常突出的情况,采用直流输电是解决稳定问题的有效方案。
直流输电可以联结额定频率不同的电力系统,采用“背靠背”的直流输电环节,可实现不同额定频率交流电力系统之间功率的传输和交换。
直流输电传输功率控制的快速性,提供大功率和小信号快速调制的可能,可用以提供了紧急功率支援,平息交流系统的振荡,提高系统的稳定性。
采用汞弧整流阀技术的第一代直流输电线路在20世纪50年代得到发展。
1954年瑞典建成了110千伏电压约100公里的海底直流输电线(从Gotland到瑞典大陆),输电能力20兆瓦。
60年代可控硅技术的发展,为直流输电提供了价格性能更好的换流元件,使直流输电技术发展到一个新的阶段。
直流系统保护
Document Number No of Pages65No of Attached Pages The Three Gorges-Changzhou ± 500 kV DCTransmission Project1JNL100029-886 Rev. 01Prepared Title Reg./Class no.Hans Hillborg, 1999-08-31Approved Resp Dept Hans Tyskhagen, 1999-12-30PKC DC System ProtectionWS-FJ-101D This document is issued by means of a computerized system. The digitally stored original is electronically approved.The approved document has a name and date entered in the approved-field. A manual signature is not required.Summary 1Rewritten Karl-Ola Jonsson 2000-02-09Hans Tyskhagen 2000-03-15Rev ind Revision text Prepared Approved This document describes the DC System Protection for The ThreeGorges-Changzhou ± 500 kV DC Transmission Project. The DC System Protectionincludes the following four groups of protections.• Converter protections.• Pole protections (DC switchyard incl. pole and neutral busses, DC line and DCfilter).• Bipole protections (Bipole neutral and Electrode line).• Converter AC bus and converter transformer protections.For each protective function the purpose of the protection, principle of protectionoperation, fault strategy and protection coordination, consequences of protectionoperation, redundancy or backup of protection and consequences oftelecommunication outage are described.Table of Contents1Introduction (4)2Abbreviation (4)3General Protection Philosophy (5)4Fault Clearing Actions (7)4.1Transfer to Redundant Protection System (7)4.2Retarding of the Converter (8)4.3Order Down to the Rectifier (8)4.4Blocking of the Converter (8)4.4.1Type X - Blocking (9)4.4.2Type Y - Blocking (9)4.4.3Type Z - Blocking (9)4.5AC Circuit Breaker Trip (9)4.6Start Breaker Failure Protection (10)4.7Set Lockout Relay for AC Circuit Breaker (10)4.8Runback (10)4.9Pole Isolation (10)4.10Pole Balancing (10)4.11Reclose Transfer Breaker (10)4.12Close Neutral Bus Ground Switch (11)5Protective Functions (11)5.1Converter Protections (13)5.1.1Valve Short Circuit Protection (14)5.1.2Commutation Failure Prediction (14)5.1.3Commutation Failure Protection (15)5.1.4Voltage Stress Protection (16)5.1.5DC Overvoltage Protection (17)5.1.6Valve Misfire Protection (18)5.1.7Thyristor Monitoring (18)5.1.8DC Overcurrent Protection (19)5.1.9Back-up DC Overcurrent Protection (20)5.1.10High Angle Supervision (21)5.1.11Valve DC Differential Protection (22)5.1.12Auxiliary Power Supervision (23)5.1.13Valve Cooling System Protection (23)5.2Pole Protections (24)5.2.1DC Harmonic Protection (25)5.2.2DC Pole Bus Differential Protection (25)5.2.3DC Neutral Bus Differential Protection (26)5.2.4DC Pole Differential Protection (27)5.2.5Electrode Line Open Circuit Protection (27)5.2.6DC Filter Overload Protection (28)5.2.7DC Filter Capacitor Unbalance Protection (29)5.2.8DC Filter Differential Protection (29)5.2.9DC Line Protections (30)5.2.10DC Undervoltage Protection (34)5.2.11Open Line Test Operation (35)5.2.12Open Line Test Supervision (35)5.2.13Reverse Power Direction Protection (35)5.2.14Smoothing Reactor Protective Relays (36)5.3Bipole Protections (41)5.3.1Bipole Neutral Bus Differential Protection (42)5.3.2Station Ground Overcurrent Protection (42)5.3.3Transfer Breaker Protections (43)5.3.4Metallic Return Transverse Differential Protection (47)5.3.5Metallic Return Longitudinal Differential Protection (47)5.3.6Metallic Return Conductor Ground Fault Protection (48)5.3.7Electrode Line Overload Protection (48)5.3.8Electrode Line Impedance Supervision (49)5.3.9Electrode Line Unbalance Supervision (49)5.4Converter AC Bus and Converter Transformer Protections50 5.4.1Converter AC Bus Differential Protection (51)5.4.2Converter AC Bus and Converter TransformerOvercurrent Protection (51)5.4.3Converter AC Bus and Converter Transformer DifferentialProtection (52)5.4.4Converter Transformer Differential Protection (52)5.4.5Converter Transformer Overcurrent Protection (53)5.4.6Converter Transformer Thermal Overload Protection (54)5.4.7Converter Transformer Winding Differential Protection (54)5.4.8Converter AC Bus Overvoltage Protection (56)5.4.9Converter Transformer Neutral Shift Protection (56)5.4.10Converter Transformer Zero Sequence Current Protection.57 5.4.11Converter Transformer Overexcitation Protection (58)5.4.12Converter Transformer Saturation Protection (58)5.4.13Last Breaker Protection, Zhengping only (59)5.4.14Converter Transformer Restricted Earth Fault Protection (59)5.4.15Converter Transformer Protective Relays (60)6References (65)1 IntroductionThis document describes the DC protections functions according to therequirements in [1]. For all protections the following items are described in detail.•Purpose of the protection.•Principle of protection operation.•Fault strategy and coordination between the DC control, DC protection and theAC protection.•Consequences of protection operation, such as DC control and switching actioninitiated at both converter stations.•Redundancy of protection or reference to what protection acts as back up.•Consequences of telecommunication outage.The following information is found in separate reports•Required accurancy of measuring signals is presented in [4]•Detailed calculations of the protection settings together with limiting faultscases and/or criteria that determines these settings is presented in [5] and [8].2 AbbreviationACP AC Control and Protection.CT Current Transformer.DCCT DC Current Transformer.GRTS Ground Return Transfer Switch.HAS High Angle Supervision.IVD Three phased rectified AC currents ∆-winding.IVY Three phased rectified AC currents Y-winding.MACH 2Modular Advanced Control for HVDC and SVC.MC Main ComputerMRTB Metallic Return Transfer Breaker.NBGS Neutral Bus Ground Switch.NBS Neutral Bus Switch.OCT Optical Current Transformer.OLT Open Line Test3 General Protection PhilosophyThe purpose of the HVDC System Protection is to cause the prompt removal of anyelement of the transmission system from service, e.g. when it suffers a short circuitfault or when it starts to operate in any abnormal manner that might cause damageor otherwise interfere with the effective operation of the rest of the system. Theprotective system is aided in this task by the AC circuit breakers, which are capableof de-energizing the converter transformers, thereby eliminating the direct currentand voltage.The latest protection system uses powerful computers and allows future adoptionof new protective functions and adjustments of existing protections in a flexiblemanner. The protection system is built in a modular way, which enables astructured design for complete system.Redundant Control and Protection systems (Main 1 and Main 2) are provided.The HVDC control and protection systems are based on a fully redundant activestandby concept. In general, each system consists of primary and backupprotections.Figure 1 System overview.Each of the two main systems consists of two main computers MC1 and MC2.MC1 contains the DC control and DC protections set 1 and MC2 contains DCProtections set 2.In order to improve security for converter, pole and bipole protections which canoperate inadvertently for control system faults measurements, the concept of usingfast changeover from active to standby system is adopted. Before a trip order isissued from active protection system, a system change over is performed wheneverdelay due to such changeover is acceptable. If the redundant system issues a triporder as well, the order will be sent through. To separate between change over anda block/trip orders, both time and level separation is used.The converter AC bus and the converter transformer protections are active in bothMain 1 and Main 2 protection systems.In addition, each system has extensive self-supervision which further enhancessystem security. Any detected failures in the control and protection hardware willSYSTEM OVERVIEW MAIN 1( CUBICLE A )DC SYSTEMPROTECTIONSET 2CONTROLDC SYSTEMPROTECTIONSET 1MC 1MC 2MAIN 2( CUBICLE B )DC SYSTEM PROTECTION SET 2CONTROL DC SYSTEM PROTECTION SET 1MC 1MC 2result in a request for change over, which will be executed if there is a stand-by system that is ready to take over.The proposed protective scheme is designed to meet the following general requirements:a)Fault conditions or other abnormal conditions that might expose equipment tohazards shall be detected. Also conditions that cause unacceptable disturbances to operation should be detected and the faulty or overstressed equipment should be taken out of service or relieved of stresses in a controlled way.b)The aim of the protection design is to detect every condition, according toabove, with at least two protections.c)Steps to minimize the possibility of fault in one converter causing protectiveaction in other converters shall be taken.d)The protections will be arranged into overlapping protective zones. For eachfault case, there should be a fast main protection with a limited protective zone.The main protection is normally supported with a slower or less sensitivebackup protection. The backup protection will, if possible, be based on adifferent measuring principle and, when applicable, with a more extendedprotective zone.e)The consequences of protection operating and protection coordination shall bearranged to avoid bipole outages.f)Auxiliary power supplies and sources to main 1 and main 2 protections shall beseparated.g)Tripping paths to the breaker shall be redundant. Trip coil on the breaker shallbe redundant and fed by two different auxiliary power supplies.h)The protections shall be arranged so that testing and maintenance can be carriedout without affecting the operation of the converter.Bipole protection philosophy:The aim with the overall protection philosophy is to avoid undue bipole outage during any circumstances.Examples of possible faults and disturbances which are covered by the proposed protection philosophy:−Common mode disturbances and faults, such as AC system disturbances which will give disturbances to both poles.−DC side disturbances related to common bipole equipment, such as the bipole neutral bus, station earth, metallic return, electrode line, transfer breakers etc.−Domino effect, such as faults in one converter causing protective action in other converter.According to above philosophy:a)Protections related to equipment within a pole are separated between the poles,and have separate measuring devices.b)Bipolar protections are used for equipment common for the two poles. Eachpole has its own set of bipole protections using separated measuring paths.c)No protection, pole related or bipole related is allowed to trip the other pole.d)There are no single protection actions for bipole related faults or disturbanceswhich can lead to a bipole outage.It is recognized that during bipolar operation mode with temporary groundconnected, a fault in one of the two converter poles shall lead to a shutdown ofthe other pole too. This is done in order to avoid current in the station groundnet.4 Fault Clearing ActionsThe switching actions that are utilized to clear DC faults and DC breaker/switchfailures are:a)Transfer to redundant control and protection system.b)Retard and blocking of the converters.c)Order down of the converter.d)Tripping of AC circuit breaker.e)Start breaker failure protection.f)Set lockout relay for AC circuit breaker.g)Runback.h)Pole isolation.i)Pole balancing.j)Reclose transfer breaker.k)Close neutral bus ground switch.These switching actions are explained below.4.1 Transfer to Redundant Protection SystemA protection action may be the result of an error in some part of the active controlsystem, such as a measurement failure, i.e. an overcurrent or overvoltage situationmay depend on a failure in the control system. To avoid unnecessary trips atcontrol failures, some protections will order a change over to the other Control andProtection system as the first action. This protective action is used when oneprotection system is active and the other is in stand-by, except when instantaneousfault clearing is required.If a control failure was the reason for the protection action, the trip condition willdisappear since the whole control is changed to a healthy system.At the same time when the change over is executed, the other system will becomeactive. The system that initiated the change over will be set in a not Stand-bycondition which means that it is not possible to automatically order this system tobe in active mode again. A manual action must be taken to put the system back inStand-by mode. If a system is in service with no alarm but not set in Stand-bymode, an alarm will be given to the operator.The protection system that is in Stand-by mode is continuously supervised. Adetected failure will set the system in not Stand-by mode, thus preventing a changeover to this system.4.2 Retarding of the ConverterRetarding means that as soon as it has been ordered, the next control pulses aredelayed with respect to the previous one. This increases the firing angle until thefull inverter operation that constitutes the limit for the firing angles has beenachieved.The retarding will reverse the polarity of the rectifier converter voltage, therebyextinguishing the direct current.4.3 Order Down to the RectifierAn order down means retarding of the converter and after the retard that the firingangle be kept at minimum extinction angle until the ORDER DOWN is released.When the order down is released, the converter firing angles are decreased untilnormal operation is reached. This protective action is used to clear line faults withminimum disturbances on the transmission.Order Down includes a preset number of restart attempts.4.4 Blocking of the ConverterBlocking means removing the control pulses from the thyristors. When this is done,the valves will stop conducting as soon as the current reaches zero.When blocking, it is sometimes desirable to provide a current path for the DC sidecurrent. If so, the bypass pairs (two opposite valves within the same six-pulsegroup connected to the same AC phase) are simultaneously fired. This provides aby pass across the converter and is normally employed when permanent earth faultsare detected.Figure 6 Bypass pair firing.The protective blocking actions can be categorized as X, Y, or Z type blocking. AnX-blocking always implies a blocking without simultaneous firing of by-pass pairsand as well a blocking with BPP when the AC breaker has opened in the inverter.A Z-blocking always implies a blocking with simultaneous firing of by-pass pairs.A Y-blocking is conditional and implies blocking without by-pass pairs in therectifier and with by-pass pairs in the inverter. All converter blocking orders areredundant and have redundant signal paths to the converter blocking sequences.4.4.1 Type X - BlockingA category X-blocking is used during valve faults and it is mainly ordered byprotections which are initiated for a short circuit across a valve. X-blocking willalso be used for faults in the firing circuits where a correct selection of by passpairs cannot be achieved.In rectifier operation, a valve short circuit gives rise to an initial large short circuitcurrent through a healthy valve in the three pulse valve group accommodating theshort circuited valve. To limit the overcurrent to one pulse only, the fault detectionmust be fast and the converter must be blocked without firing of by-pass pair.In inverter operation, a valve short circuit does not give rise to a large initial shortcircuit current. Therefore, it is not necessary to immediately block the converter. Inorder to limit the amplitudes of the short circuit currents, the converter is retarded,i.e. kept at minimum commutation margin angle until the converter is blocked.The complete X-blocking fault clearing sequence may be summarized as follows:Rectifier:−Immediate retarding of the converter.−Subsequent blocking of the converter without firing of by-pass pairs.−Tripping of AC circuit breakers feeding the converter.Inverter:−Immediate retarding of the converter.−Tripping of AC circuit breaker.−Blocking of the converter with by-pass pair when the AC breaker has started toopen.4.4.2 Type Y - BlockingThe Y-blocking is generally used for DC side faults which do not expose theequipment to serious stresses, AC faults and manual blocking of the pole.−Immediate retarding of the converter.−The converter is blocked directly with by-pass pairs in the inverter andtherefore resembles a category Z blocking. In the rectifier, the order to block isdelayed to bring about the extinction of the current before blocking. Theblocking is made without by-pass pairs in the rectifier if the DC current isbelow a voltage dependent limit. Otherwise, the converter is blocked with by-pass pairs.4.4.3 Type Z - BlockingThe Z-blocking is generally used for earth faults or overcurrents related to the DCside.Z-blocking always implies immediately retarding of the converter and blockingwith simultaneous firing of by-pass pairs.4.5 AC Circuit Breaker TripThe AC circuit breaker trip disconnects the AC side of the converter transformersfrom the AC power source. By doing this, the AC system (which is primarily aconstant voltage source) is prevented from feeding a fault on the valve side of theconverter transformer. Also, the removal of AC voltages from the valves avoidsunnecessary voltage stresses especially when the valves have performed severecurrent stresses.All protective trip orders to the AC circuit breakers will energize both trip coils inthe breakers through two different trip devices. The redundant trip orders will alsobe fed by two redundant auxiliary power supplies.This action is generally activated by a serious fault in the converter pole.4.6 Start Breaker Failure ProtectionAt the same time a trip order is sent to the AC breaker, generally an order is alsosent to start the breaker failure protection. If the breaker does not succeed inopening, the breaker failure protection orders a trip of the next breaker further out.4.7 Set Lockout Relay for AC Circuit BreakerIf a protection trip order has been sent to the AC breaker, then an order to thelockout relay will also be sent to prevent the breaker from being closed before theoperator has checked the cause of the trip. The lockout relay circuit is manuallyreset by operator.4.8 RunbackThe runback feature will, as quickly as possible, reduce the transmitted power to apreset maximum level in an attempt to keep the transmission in operation.This action is generally activated by overload conditions in the valve or in theelectrode line.4.9 Pole IsolationThe isolate pole sequence implies disconnecting the DC bus from the DC line anddisconnecting the converter neutral from the electrode line.This is done either manually during normal shut down or from protective actionsfor faults which trip the pole.4.10 Pole BalancingCurrent balance between the poles is achieved in normal operating mode. Shouldhowever the transmission be running in another operation mode initiated by theoperator, high electrode line current may occur. Current balancing can be achieved,initiated manually or from protection action. The pole balancing order is treated asa runback. The runback level in each pole, will be decided out from the lowestcurrent order, of the two poles.This action is generally activated by a measured current in the electrode line duringbipolar operation.4.11 Reclose Transfer BreakerThe transfer breaker reclose sequence is initiated from i.e. neutral bus switchfailure protection, to protect the pole equipment and station ground net in case theneutral bus switch fails to commutate the current over to the electrode line.4.12 Close Neutral Bus Ground SwitchThe neutral bus ground switch close sequence is initiated from i.e. electrode lineopen circuit protection, to reduce possible high neutral voltages.5 Protective FunctionsThis section describes the Main1 DC protections used for the ThreeGorges-Changzhou ± 500 kV DC Transmission Project. Main 2 protection setup isidentical to the Main 1 but with redundant measuring points.The following four main groups of protections are included.a)Converter protections containing:Set 1 S et 2Valve short circuit protection Valve short circuit protectionCommutation failure prediction Commutation failure protectionCommutation failure protection DC overvoltage protectionVoltage stress protection Back-up DC overcurrent protectionValve misfire protection Valve DC differential protectionThyristor monitoringDC overcurrent protectionHigh angle supervisionb)Pole protections containing:Set 1 S et 2DC pole bus differential protection DC harmonic protectionDC pole differential protection DC neutral bus differential protectionElectrode line open circuit protection Electrode line open circuit protectionDC filter capacitor unbalance prot. DC filter overload protectionDC filter differential protection DC undervoltage protectionDC line protection (travelling wave) Reverse power direction protectionDC line protection (derivative andlevel)DC line longitudinal differential prot.Open line test supervisionc)Bipole protections containing:Set 1 S et 2Bipole neutral bus differential prot.Station ground overcurrent protection Transfer breaker protections (NBGS,Back-up transfer breaker protectionsNBS, GRTS, MRTB)(NBGS, NBS, GRTS, MRTB)Metallic return longitudinal diff. prot.Metallic return transverse differential prot. Electrode line overload protection Metallic return conductor ground faultprotectionElectrode line unbalance supervisiond)Converter AC bus and converter transformer protections containing:−Converter AC bus differential protection.−Converter AC bus and converter transformer overcurrent protection.−Converter AC bus and converter transformer differential protection.−Converter transformer differential protection.−Converter transformer overcurrent protection.−Converter transformer thermal overload protection.−Converter transformer winding differential protection.−Converter AC bus overvoltage protection.−Converter transformer neutral shift protection.−Converter transformer zero sequence current protection.−Converter transformer overexcitation protection.−Converter transformer saturation protection.−Converter transformer restricted earth fault protection.In addition to the above four groups the following protections are also included, which are physically located in other distributed systems:−Auxiliary power supervision−Valve cooling system protection−Smoothing reactor protective relays−Electrode line impedance supervision−Converter transformer protective relays−Last breaker protection, Zhengping only.5.1 Converter ProtectionsIn general the converter protection measuring location and set up in each mainprotection system is as presented in the figure belowFigure 2 Configuration of the converter protectionsM A I N 1 C O N V E R T E R P R O T E C T I O N , S E T 1M A I N 1 C O N V E R T E R P R O T E C T I O N , S E T 25.1.1 Valve Short Circuit ProtectionPurpose of the protectionTo protect the thyristor valve from stresses due to short circuits on the DC-side of the converter transformer.Principle of protection operationThe protective function uses the converter transformer currents IVY and IVD, the DC pole bus and neutral bus direct currents and the DC filter current. In normal operation the currents are balanced.Higher amplitudes in the converter transformer currents than in the direct current is a criterion on a valve short circuit or other phase to phase short circuits. At an excess in AC side current, the converter is tripped instantaneously.Fault strategy and protection coordinationWhen a valve short circuit occurs, the high amplitude current is conducted by the faulty valve and by a second healthy valve as it attempts to commutate. If a third valve is fired in the same three pulse group, such a high current will also be conducted by this valve. This is avoided by a fast detection of the fault and by ordering a blocking without by-pass pairs before the third valve is fired. Consequences of protection operation−X-block of the converter.−Trip of the AC circuit breaker.−Pole isolation order.−Start of the breaker failure protection.−Set lockout of AC circuit breaker.Redundant and backup of protectionThe valve short circuit protection in the other set.Consequences of telecommunication outageNot applicable.5.1.2 Commutation Failure PredictionPurpose of the protectionTo reduce the number of commutation failures caused by AC net disturbances. Principle of protection operation7KH SURWHFWLYH IXQFWLRQ XVHV WKH ]HUR VHTXHQFH FRPSRQHQW DQG WKH FRPSRQHQWVof the AC voltage.At an abnormal AC voltage the function will instantaneously order an increase of the commutation margin in order to avoid commutation failure.Fault strategy and protection coordinationNot applicable.Consequences of protection operationIncrease of the inverter firing angleRedundant and backup of protectionCommutation failure protections.Consequences of telecommunication outageNot applicable.5.1.3 Commutation Failure ProtectionPurpose of the protectionTo detect commutation failures in the twelve-pulse converter that are caused from AC net disturbances or other abnormal commutation conditions.Principle of protection operationThe protective function uses the converter transformer currents IVY and IVD, the DC pole bus and neutral bus direct currents and the DC filter current. Commutation failures in a six-pulse bridge are characterized by a significant reduction of AC phase current amplitudes whereas the current on the DC side is subject to an increase. This condition is detected. A commutation failure is not a fault as such but an indication of other faults such as control pulse transmission faults or AC network faults.Persistent fault in one of the six-pulse bridges are most likely a result of valve misfire (e.g. no control pulse or continuos control pulse to a valve) whereas intermittent faults in both bridges will occur at AC network disturbances. These facts are used to distinguish between control pulse transmission fault and AC system faults.At a commutation failure the protection will instantaneously order an increase of the commutation margin in the faulty converter to improve recovery.At persistent commutation failures in one of the six-pulse bridges, the protection will trip the converter after a preset time delay. At persistent commutation failures in both six-pulse bridges, the protection will trip the converter after another preset time delay.Fault strategy and protection coordinationThe part that detects commutation failures in both six-pulse bridges, i.e. due to AC side disturbances must be coordinated with the longest clearing time for AC faults. Consequences of protection operationAt all commutation failures:−Instantaneous advancing of firing angle in faulty converter to improve recovery.−Lock order to the line protections in the rectifier station via telecom to avoid line protection operation.−Start of the Transient Fault Recorder.After 2 commutation failures, within a defined time window:−Transfer order to redundant Pole Control.After 3 commutation failures, within a defined time window (Control pulse transmission fault):。
1.直流换流站运维技能培训系列教材(国家电网~
国家电网公司直流换流站运维技能培训系列教材国家电网公司防止直流换流站单、双极强迫停运二十一项反事故措施国家电网公司运维检修部组编《国家电网公司防止直流换流站单、双极强迫停运二十一项反事故措施》批准:帅军庆审定:李庆林复审:张启平刘泽洪梁旭明初审:叶廷路高理迎王玉玲娄殿强编制:冀肖彤孙杨张民王庆石岩唐开平佘振球前言目前,公司系统已投运跨区直流输电工程13个,换流站23座,输送容量3352.4万千瓦。
“十二五”期间,公司还将有一大批跨区直流输电工程开工建设并投运。
跨区直流输电系统作为国家电网主网架的重要组成部分,是在更大范围内实施电力资源优化配置的重要战略通道,具有输送容量大、输电距离长、技术先进、设备复杂的特点,对设备运维提出了更高要求。
直流输电在我国起步时间晚,发展速度快,运维人才相对缺乏。
为了进一步提高培训工作的系统性和针对性,加快人才培养速度,国家电网公司运维检修部组织运维单位、设备厂家、科研院所编写了本套教材。
本套教材的内容来源于设备厂家说明书、现场运行规定及实际运维经验总结,涵盖了直流运行、控制保护、换流阀及阀冷却专业的运行维护技术,特别对现场作业技能进行了详细的描述,编写力求准确、清晰,面向生产一线,突出现场实用性。
本套系列教材目前包括《国家电网公司防止直流换流站单、双极强迫停运二十一项反事故措施》、《国家电网公司直流换流站设备状态检修管理标准及工作标准》、《直流输电原理》、《设备运行》、《系统运行》、《MACH2控制保护系统》、《SIMADYN D控制保护系统》、《ABB技术换流阀》、《SIEMENS 光触发技术换流阀》、《AREVA技术换流阀》、《Sweden Water技术阀冷却系统》、《高澜技术阀冷却系统》、《许继技术阀冷却系统》、《典型故障汇编》共十四个分册,后续将逐步修编完善。
由于编写时间仓促,疏漏之处在所难免,恳请广大读者批评指正。
2012年7月目录1.防止非电量保护误动 (1)2.防止直流保护和换流变电气量保护误动 (2)3.防止内冷水保护误动 (3)4.防止最后断路器保护误动 (4)5.防止直流控制系统故障 (5)6.防止换流阀及阀控系统故障 (6)7.防止电压、电流回路故障 (7)8.防止控制保护软件错误 (8)9.防止站用交流电源故障 (9)10.防止站用直流电源故障 (10)11.防止内冷水主泵故障 (11)12.防止跳闸回路常闭接点故障 (12)13.防止直流开关、刀闸辅助接点异常变位故障 (12)14.防止网络通讯故障 (13)15.防止阀厅损坏故障 (14)16.防止误操作事故 (15)17.防止交、直流滤波器及并联电容器故障 (16)18.防止换流站室外端子箱、接线盒受潮故障 (17)19.防止换流站室外设备污闪故障 (17)20.防止CT选型不当 (18)21.防止主变与换流变共串 (18)1.防止非电量保护误动1.1在设备采购阶段,应在各类设备规范书中明确要求作用于跳闸的非电量元件都应设置三副独立的跳闸接点,按照“三取二”原则出口,三个开入回路要独立,不允许多副跳闸接点并联上送,三取二出口判断逻辑装置及其电源应冗余配置。
基于Blackboard平台的电气传动控制系统网络课程设计与构建
力较差 的学生更好地 掌握 基本教学 内容 , 还可以辅助能力较 强的 学生掌握 更多提 高型的教学 内容 , 启发 其进 行更深层 次的探 索和
研 究。
[ 关键 词 ] 网络课 程
B l a c k b o a r d平 台 电气传动控制 系统
[ 中图分类号] G 4 3 4
[ 文献标识码 ] A
课程信 息包括课程简 介 、 教学 大纲 、 实 验大纲 、 部分
相关教 改论 文 , 满足学 生对本课程 的 了解 。明确课 程的
性质 和定位 , 阐明课程 的教 学 内容 , 指 出课 程 的主要 特
作学 习 , 提高信 息化教学水平。
本 文 主 要 是 基 于 目前 市 场 主 流 的 网络 课 程 平 台 B l a c k B o a r d ,探 索研究建设 电气传 动控制系统 的 网络课 程 的问题 , 解决 网络课 程建设 的具 体功 能与 内容 , 以实
彦 霜
2 0 1 4 年 2 月
Un i v e r s i t y Ed u c a t i o n F e b r u a r y 2 0 1 4
,
基于 B l a c k b o a r d平台的电气传动控制系统 网络课程设计与构建
谭树彬( 东北 大 学来自[ 摘张长平何大阔
本 网络课 程 的内容 资源管 理功 能主 要有 课程 信 息 模块、 课 程文 档模 块 、 讨 论 与交 流模 块 、 作 业 与测 试 模 块、 教师 团队模块 、 其他相关 资源模块 等 。 具体结构 如图
1 所示 。 ( 一) 课 程 信 息
如使学 生更快地理解 和学习教学 内容 , 达到教 书育人 的 目的 , 是专业课教师普遍 面临的现实教学难题 。 教育 部发布教 育信息化 十年发展规 划 ( 2 0 1 1 — 2 0 2 0 年) 推进信息技术 与教 学融合 。建设智能化教学环境 , 提 供优质数 字教育资源和 软件 工具 , 利用 信息技术 开展启 发式 、 探 究式 、 讨论式 、 参 与式教学 , 鼓励 发展性 评价 , 探 索建立 以学习者为 中心 的教学新模式 , 倡导 网络 校际协
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
调节时间 。
(4)用PID调节器校正时,其传递函数为
取 , ,令 ,则按二阶典型系统校正后系统开环传递函数为
同样,取 ,则
调节时间 。
比较采用不同调节器的ts,可知采用PID调节器调节时间最短,效果最好;采用I调节器调节时间最长,效果最差;采用P调节器和PI调节器虽然有相同的调节时间,但采用P调节器时,系统是有差系统,因此两者的稳态性能是截然不同的。
东北大学继续教育学院
直流自动控制系统试卷(作业考核线上)B卷
学习中心:院校学号:姓名
(共3页)
总分
题号
一
二
三
四
五
六
七
八
九
十
得分
解:
1)
2)当 时, 代入
3)
由 ,得
4)当 V时,则有
所以 V/A
5)
6) V
解:
(1)用P调节器校正时,调节器传递函数为
需近似处理后才能校正成为二阶典型系统
则校正后系统开环传递函数为
(2)
转速环小时间常数为
转速调节器ASR的传递函数为
按对称三阶系统设计,取对称最佳参数 ,则转速环开环放大倍数:
转速调节器参数选择为
积分时间常数:
比例放大系数:
对近似条件进行如下校验:
转速环的截止频率为
电流环传递函数简化条件( )
满足近似处理条件。
转速环小时间常数近似处理条件( )
满足近似处理条件。
选择ASR输入电阻
则ASR的反馈电阻和电容可计数如下:
,实取
滤波电容为
(3)
转速环按对称三阶系统设计,取对称最佳参数 , ,基值为:
所以,带 额定负载启动到额定转速时的超调量为:
启动时间:
式中, ,
为使 ,取二阶工程最佳参数 ,因此
调节时间
(2)用I调节器校正时,调节器传递函数为
(也可以写成 )
按二阶典型系统校正,校正后开环传递函数为
式中, , 。
按 ,可取 ,所以
调节时间 。
(3)用PI调节器校正时,调节器传递函数为
取 ,并将 , , 看成小时间常数,令
则按二阶典型系统校正时系统开环函数为
(1)计算带 额定负载启动到额定转速时的超调量和启动时间。
参答案
(1)
电流环小时间常数为
电流调节器ACR的传递函数为
电流环开环放大倍数:
电流调节器参数选择为
积分时间常数:
比例放大系数:
选择ACR输入电阻
则ACR的反馈电阻和电容可计数如下:
,实取
滤波电容为
近似条件校验:
电流环截止频率:
所以 满足近似条件