直流自动控制系统B卷谭树彬(2)
提升机直流电控系统零速制动功能的实验专业技术方案研究及应用

提升机直流电控系统零速制动功能的实验方案研究及应用-工程论文提升机直流电控系统零速制动功能的实验方案研究及应用江善清JIANG Shan-qing(山钢集团山东金岭矿业技术中心,淄博255081)(Technology Center of Shandong Jinling Mining Co.,Ltd.,Shandong Iron Steel Group,Zibo 255081,China)摘要:通过对电控系统的硬件设施和软件程序进行设定,找出一种方式在模拟零速状态下进行操作,实现制动减速过慢时的及时投入辅助制动的效果,同时在实际情况下进行验证。
Abstract:Through setting the hardware and software program of electronic control system,this paper hopes to figure out a way of operating in the condition of simulation zero speed to realize the effect of timely auxiliary braking when the braking deceleration is too slow and validated that in actual situation.关键词:零速制动;实验;应用Key words:zero speed braking;experiment;application中图分类号:TD63 文献标识码:A文章编号:1006-4311(2015)25-0106-02作者简介:江善清(1983-),男,山东菏泽人,本科,现任山钢集团山东金岭矿业技术中心副主任工程师,中级职称,负责电气技术管理与设计、研发工作。
0 引言矿山生产对提升工艺及安全保护都有特殊的要求,这就决定了矿井提升机电控设备是安全生产的关键设备。
直流自动控制系统B卷谭树彬(2)

调节时间 。
(4)用PID调节器校正时,其传递函数为
取 , ,令 ,则按二阶典型系统校正后系统开环传递函数为
同样,取 ,则
调节时间 。
比较采用不同调节器的ts,可知采用PID调节器调节时间最短,效果最好;采用I调节器调节时间最长,效果最差;采用P调节器和PI调节器虽然有相同的调节时间,但采用P调节器时,系统是有差系统,因此两者的稳态性能是截然不同的。
东北大学继续教育学院
直流自动控制系统试卷(作业考核线上)B卷
学习中心:院校学号:姓名
(共3页)
总分
题号
一
二
三
四
五
六
七
八
九
十
得分
解:
1)
2)当 时, 代入
3)
由 ,得
4)当 V时,则有
所以 V/A
5)
6) V
解:
(1)用P调节器校正时,调节器传递函数为
需近似处理后才能校正成为二阶典型系统
则校正后系统开环传递函数为
(2)
转速环小时间常数为
转速调节器ASR的传递函数为
按对称三阶系统设计,取对称最佳参数 ,则转速环开环放大倍数:
转速调节器参数选择为
积分时间常数:
比例放大系数:
对近似条件进行如下校验:
转速环的截止频率为
电流环传递函数简化条件( )
满足近似处理条件。
转速环小时间常数近似处理条件( )
满足近似处理条件。
选择ASR输入电阻
则ASR的反馈电阻和电容可计数如下:
,实取
滤波电容为
(3)
转速环按对称三阶系统设计,取对称最佳参数 , ,基值为:
所以,带 额定负载启动到额定转速时的超调量为:
东大14秋直流自动控制系统B卷谭树彬(2)答案

课程名称: 直流自动控制系统
1 东 北 大 学 继 续 教 育 学 院
直流自动控制系统 试 卷(作业考核 线上) B 卷
学习中心: 院校学号: 姓 名:
(共 3 页)
解:
1. 先计算电动机电动势常数
220152
Φ0.127 V m i n /r
1500
nom nom a e nom U I R C n --⨯===⋅ 开环系统的静态速降为
()15(21)354.33 r/min 0.127
nom nom a rec op e e I R I R R n C C ∑+⨯+∆====ΦΦ
2. 满足调速要求所允许的静态速降为
第一题(15分)
有一V-M 调速系统,电动机参数为nom 2.5 kW P =,nom 220V U =,nom 15A I =,nom 1500 r/min n =,a 2R =Ω;整流装置内阻rec 1R =Ω,触发整流装置的放大倍数s 30K =。
要求调速范围D =20,静差率S ≤10%,试求
1. 计算开环系统的静态速降op n ∆;(3分)
2. 计算调速要求所允许的静态速降cl n ∆;(3分)
3. 采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)
4. 调整该系统,使*
n 20V U =时转速1000 r/min n =,此时转速反馈系数应为多少(可
认为*n n U U ≈)?(3分)
5. 计算所需放大器的放大倍数。
(3分)。
自动控制系统优秀教案
学
过
程
一般电动状态的电压、电流波形 制动状态的一个周期分为两个工作阶段: 在 0 ≤ t ≤ ton 期间,VT2 关断,-id 沿回路 4 经 VD1 续流,向电 源回馈制动,与此同时, VD1 两端压降钳住 VT1 使它不能导通。 在 ton ≤ t ≤ T期间, Ug2 变正, 于是VT2导通, 反向电流 id 沿回路 3 流 通,产生能耗制动作用 (二)直流PWM调速系统的机械特性 由于采用脉宽调制,严格地说,即使在稳态情况下,脉宽调速系统的转矩和转 速也都是脉动的,所谓稳态,是指电机的平均电磁转矩与负载转矩相平衡的状态,
s
于是,最低转速为
nN nN n0 min nmin nN
nmin
而调速范围为
nN (1 s)nN nN s s
D
nmax n N nmin nmin
将上面的式代入 nmin,得
(1-34)
D
nN s nN (1 s )
教
学
式(1-34)表示调压调速系统的调速范围、静差率和额定速降之间所应满足的 关系。对于同一个调速系统, nN 值一定,由式(1-34)可见,如果对静差率要 求越严,即要求 s 值越小时,系统能够允许的调速范围也越小。 结论1: 一个调速系统的调速范围,是指在最低速时还能满足所需静差率的转速 可调范围。 例题1-1 某直流调速系统电动机额定转速为,额定速降 nN = 115r/min,当要求 静差率30%时,允许多大的调速范围?如果要求静差率20%,则调速范围是多少? 如果希望调速范围达到10,所能满足的静差率是多少? 解 要求30%时,调速范围为
教 (2)有制动的不可逆PWM变换器电路 工作状态与波形 一般电动状态: 在一般电动状态中, 始终为正值 (其正方向示于图1-17a中) 。 设ton为VT1的导通时间,则一个工作周期有两个工作阶段: 在0 ≤ t ≤ ton期间, Ug1为正,VT1导通, Ug2为负,VT2关断。此时, 电源电压Us加到电枢两端,电流 id 沿图中的回路1流通。 在 ton ≤ t ≤ T 期间, Ug1和Ug2都改变极性,VT1关断,但VT2却不能立 即导通,因为id沿回路2经二极管VD2续流,在VD2两端产生的压降给VT2施加反 压,使它失去导通的可能。
单片机控制的全数字式直流调速系统
单片机控制的全数字式直流调速系统
候媛彬
【期刊名称】《工矿自动化》
【年(卷),期】1990(000)002
【摘要】本文介绍了以MCS-51单片机为核心,对直流双闭环调速系统实现全数字化控制的方法。
重点阐述了系统的硬件设计,程序编制及提高控制精度和抗干扰的措施,其数学分析结果,数字仿真结果和全数字化后系统实验测试结果基本吻合。
【总页数】4页(P18-21)
【作者】候媛彬
【作者单位】西安矿业学院电气工程系
【正文语种】中文
【中图分类】TP1
【相关文献】
1.基于单片机控制的直流电机PWM调速系统设计 [J], 李玮
2.基于单片机控制的PWM直流调速系统的研究 [J], 张永志
3.单片机控制的直流电机闭环调速系统设计 [J], 詹庄春
4.利用单片机控制直流电机调速系统设计 [J], 王山卉
5.基于单片机控制的PWM直流电机调速系统 [J], 尹冬梅
因版权原因,仅展示原文概要,查看原文内容请购买。
自动控制原理胡寿松主编课后习题答案详解
6
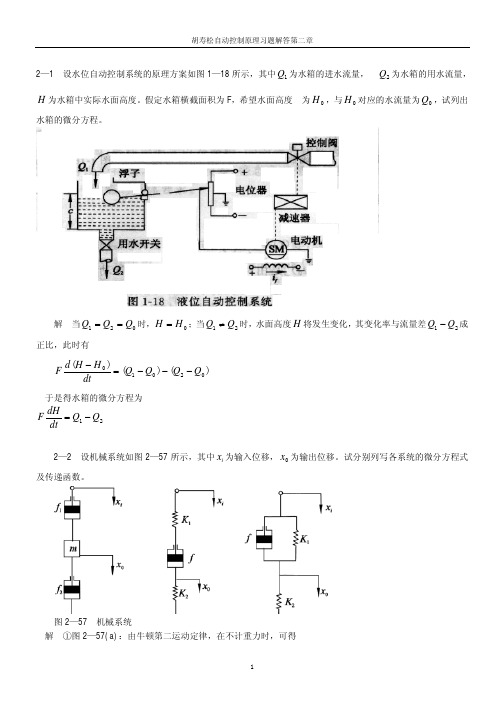
胡寿松自动控制原理习题解答第二章
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 ed − Ed0 cosα 0 = K s (α − α 0 )
其中 K s
=
ded dα
α =α
= −Ed 0 sinα 0
2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应 c(t) = 1 − e−2t + e−t ,试求系统的传递函数和脉冲
K 2 x0 = f (x& − x&0 )
消去中间变量 x,可得系统微分方程
f (K1
+
K
2
)
dx0 dt
+
K1K2 x0
=
K1 f
dxi dt
对上式取拉氏变换,并计及初始条件为零,得系统传递函数为
ቤተ መጻሕፍቲ ባይዱ
X 0 (s) =
fK1s
X i (s) f (K1 + K2 )s + K1K2
③图 2—57(c):以 x0 的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
K 2 (xi − x0 ) + f 2 (x&i − x&0 ) = f1 (x&0 − x&) (1)
K1x = f1 (x&0 − x&) (2)
所以 K 2 (xi − x0 ) + f 2 (x&i − x&0 ) = K1x (3)
对(3)式两边取微分得
一种站用直流系统异常并列检测的方法

电气工程与自动化"Dianqi Gongcheng yu Zidonghua一种站用直流系统异常并列检测的方法刘新敏郭%&奇林邱舒峰杨冲(广东电网公司梅州供电局,广东梅州514021)摘要:直流系统异常并列是直流系统的常见故障。
现简要介绍了直流系统异常并列的危害及常用查找手段,阐述了切换桥模型原理,分析了通过切换桥检测站用直流系统异常并列的方法。
关键词:直流系统;异常并列;检测方法;切换桥0引言厂站直流系统是站内重要设备,厂站配置有两套直流系统,并且两套直流系统不可长期并列运行。
两套直流系统长期并列运行将损坏电电,且去配合,进而扩大停电围,不厂站的运行。
运行过,两套直流系统经常会因为运行人员操作错误或接线错误导致异常并列的情况出现。
1直流系统异常并列的常用查找手段的直流系统,配备的直流系统异常并列检测I设备,异常并列的现有两是套直流系统现异常,另一套直流系统也同时报绝缘异常,运通过绝缘电站用直流系统是异常并列行;二是运.套直流系统电的电,套系统电,现异常并列I方法法在无接地故障时作出两套系统异常并列的,而设备长异常并列运行,损坏设备;方法只期查是异常并列,不及现异常并列情况。
2切换桥模型分析直流系统对于系统的接地检测主要利用了平衡桥原理,电大°桥原理,了不桥切换桥,了通过切换桥检测直流系统异常并列的方法°2.1切换桥模型组成切换桥模型1示,该模型包括了电R1、二电阻!%、第三电阻!&和第四电阻和的,直流系统桥电的10倍。
该模型还包括开关"1、开"%、三开关"&四开K',R i、R%分别通过K i、K%至直流母的正极,端;!&、!'分别通过K&、"'至直流母的负极,端接地°2.2切换桥的控制以1s为基本单位,8s为一个周期。
其中,K i在第1s闭合,第4s断开;K%2s闭合,3s断开;K&5s闭合,第8s断开;K'6s闭合,7s开。
电力拖动自动控制系统(陈伯时)ppt1-2-3直流拖动控制系统

n
2U 2
cos[sin(
6
)
sin(
6
)ectg
]
Ce (1 ectg )
(1-10)
Id
3 2U2
2R
[cos(
6
) cos(
6
)
Ce n]
2U 2
式中 arctg L ; — 一个电流脉波的导通角。
R
89电电力力拖传动动自控动制控系制统系统
21
(3)电流断续机械特性计算
当阻抗角 值已知时,对于不同的控制 角 ,可用数值解法求出一族电流断续时的
1
LP
VT
T
c1
2
c2
L
b1 a1
b2 M
a2
并联多重联结的12脉波整流电路
89电电力力拖传动动自控动制控系制统系统
17
1.2.4 晶闸管-电动机系统的机械特性
当电流连续时,V-M系统的机械特性方程式为
n
1 Ce
(U d0
Id R)
1 Ce
m ( π Um
sin
π m
cos
Id R)
(1-9)
式中 Ce = KeN —电机在额定磁通下的电动势系数。 式(1-9)等号右边 Ud0 表达式的适用范围如第1.2.1节
R— 主电路等效电阻;
且有 R = Rrec + Ra + RL;
89电电力力拖传动动自控动制控系制统系统
8
对ud0进行积分,即得理想空载整流电 压平均值Ud0 。
用触发脉冲的相位角 控制整流电压的平 均值Ud0是晶闸管整流器的特点。
Ud0与触发脉冲相位角 的关系因整流电
路的形式而异,对于一般的全控整流电路,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东 北 大 学 继 续 教 育 学 院直流自动控制系统 试 卷(作业考核 线上) B 卷学习中心: 院校学号: 姓名(共 3 页)第一题(15分)有一V-M 调速系统,电动机参数为nom 2.5 kW P =,nom 220V U =,nom 15A I =,nom 1500 r/min n =,a 2R =Ω;整流装置内阻rec 1R =Ω,触发整流装置的放大倍数s 30K =。
要求调速范围D =20,静差率S ≤10%,试求1. 计算开环系统的静态速降op n ∆;(3分)2. 计算调速要求所允许的静态速降cl n ∆;(3分)3. 采用负反馈组成闭环系统,试画出系统的静态结构图;(3分)4. 调整该系统,使*n20V U =时转速1000 r/min n =,此时转速反馈系数应为多少(可认为*n n U U ≈)?(3分)5. 计算所需放大器的放大倍数。
(3分)第二题(20分) 某调速系统如下图所示,已知数据为:电动机参数为nom 30kW P =,nom 220V U =,nom157.8A I =,nom 1000 r/min n =,a 0.1R =Ω;整流装置内阻rec 0.3R =Ω,触发整流装置的放大倍数s 40K =;最大给定电压*nm12V U =,当主电路电流最大时,整定im 45V U =。
系统的设计指标为:D =20,S =10%, 1.5dbL nomI I =, 1.1dcr nom I I =。
1. 画出系统的静态结构图;(4分)2. 计算转速反馈系数;(3分)3. 计算放大器放大倍数;(4分)4. 计算电流反馈系数;(3分)5. 当020k R =Ω时,求1R 的数值;(3分)6. 计算稳压管的击穿电压com U 。
(3分)解:1)2) 当*nm 12V U =时,nom 1000r/min n n ==代入n U n α=120.012V min/r 1000n nom U n α*≈=≈⋅3) nom nom a 220157.80.10.204V min/r 1000e nom U I R C n Φ--⨯==≈⋅nom op (0.10.3)157.8309.41r/min Φ0.204e R I n C ∑⋅+⨯∆===由nomcl (1)S n D n S ⋅=∆- ,得nom cl 0.110001005.56r/min (1)20(10.1)18S n n D S ⋅⨯∆====-⨯-op cl309.411154.655.56n K n ∆=-=-=∆ p s e K K K C αΦ⋅⋅=p s Φ54.650.20423.23400.012e K C K K α⋅⨯==≈⋅⨯4) 当45im U = V 时,则有所以450.191.5 1.5157.8im im dbL nom U U I I β≈===⨯ V/A 5) 110023.2320464.6k p p R K R K R R =⇒==⨯=Ω 6) 0.19 1.10.084 1.1157.832.98com dcr nom U I I β==⨯=⨯⨯=V(1) 用P 调节器校正时,调节器传递函数为()p p W s K =需近似处理后才能校正成为二阶典型系统11111T s T s≈+则校正后系统开环传递函数为11234()(1)(1)(1)(1)p K K KW s T s T s T s T s s Ts ==++++式中,11/p K K K T =,2340.060.0080.0020.07T T T T s =++=++= 为使%5%σ<,取二阶工程最佳参数12K T=,因此 1110.43 1.542220.07p T K K K K T ====⨯⨯ 调节时间660.070.42s t T s ≈=⨯= (2) 用I 调节器校正时,调节器传递函数为1()I i W s s τ=(也可以写成()i I K W s s=) 按二阶典型系统校正,校正后开环传递函数为11()1(1)i K KW s s Ts s Ts τ==++式中,1iK K τ=,12340.5T T T T T s =+++=。
按%5%σ<,可取112iK K Tτ==,所以 12220.52i K T s τ==⨯⨯=调节时间660.53s t T s s ≈=⨯=。
(3) 用PI 调节器校正时,调节器传递函数为11()i PI pis W s K sττ+= 取110.43T s τ==,并将2T ,3T ,4T 看成小时间常数,令2340.060.0080.0020.07T T T T s S s S =++=++=则按二阶典型系统校正时系统开环函数为1111(1)()(1)(1)(1)pi K s K KW s sT s Ts s Ts ττ+==+++ 同样,取1112pi K K K Tτ==,则 110.431.542220.07pi K K Tτ===⨯⨯调节时间660.070.42s t T s s ≈=⨯=。
(4)用PID 调节器校正时,其传递函数为12(1)(1)()PID s s W s sτττ++=取110.43T s τ==,220.06T s τ==,令340.0080.0020.01T T T s S s =+=+=,则按二阶典型系统校正后系统开环传递函数为12112(1)(1)()(1)(1)(1)(1)s s K KW s s T s T s Ts s Ts τττ++==++++同样,取112K K Tτ==,则 12220.010.04K T s s τ==⨯⨯=调节时间660.010.06s t T s s ≈=⨯=。
比较采用不同调节器的t s ,可知采用PID 调节器调节时间最短,效果最好;采用I 调节器调节时间最长,效果最差;采用P 调节器和PI 调节器虽然有相同的调节时间,但采用P 调节器时,系统是有差系统,因此两者的稳态性能是截然不同的。
参考答案 (1)电流环小时间常数为00.00170.0020.0037i s i T T T s ∑=+=+=电流调节器ACR 的传递函数为1()n ASR pnn s W s K sττ+= 电流环开环放大倍数:11135.1220.0037I i K T ∑==≈⨯ 电流调节器参数选择为积分时间常数:10.06i T s τ== 比例放大系数:110.050.06. 1.3322380.0080.0037i pi Is s i R R T K K K K T τββ∑∑∑⨯===≈⨯⨯⨯ 选择ACR 输入电阻 020R k =Ω 则ACR 的反馈电阻和电容可计数如下:0 1.332026.6i pi R K R k ==⨯=Ω, 实取27i R k =Ω30.062.226.610ii iC F R τμ===⨯滤波电容为0030440.0020.42010i i T C F R μ⨯===⨯ 近似条件校验:电流环截止频率:1135.1ci I K s ω-==1180.8s -=≈所以ci ω<(2)转速环小时间常数为0220.00370.0050.0124n i n T T T s ∑∑=+=⨯+=转速调节器ASR 的传递函数为1()i ACR pii s W s K sττ+= 按对称三阶系统设计,取对称最佳参数4h =,则转速环开环放大倍数:21813.0420.0124N K ===⨯⨯ 转速调节器参数选择为积分时间常数:40.01240.0496n n hT s τ∑==⨯= 比例放大系数:0.04960.0080.2780.08813.011.040.0130.05n e m pn NC T K K R τβα∑Φ⨯⨯⨯==⨯≈⨯对近似条件进行如下校验:转速环的截止频率为1140.320.0124cn s ω-===⨯电流环传递函数简化条件(cn ω<163.7s -===满足近似处理条件。
转速环小时间常数近似处理条件(cn ω<)154.8cn s ω-=≈>满足近似处理条件。
选择ASR 输入电阻 020R k =Ω 则ASR 的反馈电阻和电容可计数如下:011.0420220.8n pn R K R k ==⨯=Ω, 实取230n R k =Ω30.04960.2123010nn nC F R τμ===⨯ 滤波电容为0030440.00512010n n T C F R μ⨯===⨯ (3)转速环按对称三阶系统设计,取对称最佳参数4h =,/%88.5%m c Z ∆=,基值为:220.050.012422(0.4)2 1.138.270.2780.08n I nom e m T R T Z NK I T C T λ∑∑⨯==-=⨯⨯=Φ⨯ 所以,带40%额定负载启动到额定转速时的超调量为:88.5%88.5%38.27% 4.51%750nom Z n σ⨯⨯===启动时间:0.2780.087500.49(0.4)0.05 1.1624e m nom st I nom C T n t s R I λ∑Φ⨯⨯===-⨯⨯。