第三章 空间力系
空间力系的平衡
∑Mx(Fi)=0 FNC·CH-G·ED=0 ∑My(Fi)=0 G·EF+FNB·HB-FNA·AH=0 ∑Fz=0 FNA+FNB+FNC-G=0
解得:FNA=0.95 kN, FNB=0.05 kN, FNC=0.5kN
力对轴之矩等于零的情形:① 当力与轴相交时(d=0), ② 当力与轴平行时(Fxy=0)。即当力与轴共面时,力对轴之 矩为零。
第3章 空间力系的平衡
z
z
+
-
z -+
图 3.6
第3章 空间力系的平衡 3.2.2 合力矩定理
设有一空间力系F1、F2、…、Fn,其合力为FR,则合力对 某轴之矩等于各分力对同轴之矩的代数和,表达式为
第3章 空间力系的平衡
C
D 45° B
45 ° FB
45 °
FC O
G
A
(a)
G2
0.8 m C G
1
0.6 m 0.6 m
0.2 m
A NA
NC B
2m
NB
(b)
160 200 160
FAz Fr2 A
Ft2 r2 r1
FB2 B
FAx
Fr1 F FBx
t1
(c)
图 3.1
第3章 空间力系的平衡
5 4 68.6N 34 5
F3y F3 cos cos 100
5 3 51.5N 34 5
F3z F3 sin 100
3 51.5N 34
第3章 空间力系的平衡 (2) 计算力对轴之矩。
第三章 空间力系分解

F k i x
Fy Fxy
力对轴之矩计算公式
Fx
j y Fx
z x
M x ( F ) yFz zFy Fy y M y ( F ) zFx xFz
F F1 F2
F1
F2
r
M1 M2
F1'
F2'
F
'
F ' F1' F2'
M R {F , F ' }
M R r F ' r (F1 'F2 ' ) r F1 'r F2 ' M1 M2
rDC
C
F2
F1 '
M1 rBA F1
F2 '
M 2 rDC F2
rBA F1 M1 M 2 rDC F2
基本量的计算
二、力偶的性质
性质一 力偶不能与一个力等效 {F , F '} {FR } 性质二 力偶可在其作用面内任意移动(或移到另一平行平 面),而不改变对刚体的作用效应
Fxy
M z ( F ) xFy yFx
问题:力对轴之矩与力对点之矩有什么关系?
基本量的计算
力对轴之矩
MO
O
z F
M x ( F ) yFz zFy M y ( F ) zFx xFz M z ( F ) xFy yFx
力对点之矩在各坐标轴上的投影
x
y r
M Ox yFz zFy M Oy zFx xFz M Oz xFy yFx
力学第三章空间力系
第三章空间力系二、基本内容1. 基本概念1) 力在空间直角坐标轴的投影(a) 直接投影法:巳知力F 和直角坐标轴夹角a 、丫,则力F 在三个轴上的投 影分别为X = F cos aZ = Feos/(b) 间接投影法(即二次投影法):巳知力F 和夹角八°,则力F 在三个轴上的 投影分别为X = F sin/cos^9Y = F sin/sin 。
Z = F cos/2) 力矩的计算(a) 力对点之矩—、目的和要求能熟练地计算力在空间直角坐标轴上的投影。
熟练掌握力对点之矩与力对轴之矩的计算。
对空间力偶的性质及其作用效应有清晰的理解。
了解空间力系向一点简化的方法,明确空间力系合成的四种结果。
能正确地画出各种常见空间的约束反力。
会应用各种形式的空间力系平衡方程求解简单空间平衡问题。
对平行力系中心和重心应有清晰的概念,能熟练地应用坐标公式求物体 的重心。
1、2、3、4、5、6^ 7、在空间情况下力对点之矩为一个定位矢量,其定义为i j kM0(F) = rx F = x y z = (yZ - zY)i + (zX - xZ)j + (xY - yX)kX Y Zr = xi + yj + zk F = Xi+ Yj + Zk其中尸为力尸作用点的位置矢径(b)力对轴之矩在空间情况下力对轴之矩为一代数量,其大小等于此力在垂直于该轴的平面上的投影对该轴与此平面的交点之矩,其正负号按右手螺旋法则来确定,即M Z(F) = ±F u,h = +2AOAB在直角坐标条下有Mx (乃=yZ-zY M y (F)=zX-xZ M z (F) =xY-yX(c)力矩关系定理力对己知点之矩在通过该点的任意轴上的投影等于同一力对该轴之矩。
在直角坐标系下有Mo(F)^M x(F)i+My(F)j+M2(F)k(d)合力矩定理空间力系的合力对任一点之矩等于力系中各力对同一点之矩的矢量和,即Mo g)二 W, (F)空间力系的合力对任一轴(例如z轴)之矩等于力系中各力对同一轴之矩的代数和,即M z(F R)=ZM z(F)=Z(xY-yX)3)空间力偶及其等效条件(a)力偶矩矢空间力偶对刚体的作用效果决定于三个要素(力偶矩大小、力偶作用面方位及力偶的转向),它可用力偶矩矢肱表示。
空间力系

第三章 空间力系一、空间汇交力系(一)空间汇交力系的合成 1.空间力在坐标轴上的投影 (1)一次投影法如图3-1所示,若已知力F 与三个坐标轴x,y,z 间的夹角分别为θ、β和γ,则力F 在三个坐标轴上的投影分别为⎪⎭⎪⎬⎫===γβθcos cos cos z y x F F F (3.1)图3-1相应的,若已知力F 的三个投影,可以求出力F 的大小和方向,即大小为 222z y x F F F F ++=(3.2)方向 ⎪⎪⎪⎭⎪⎪⎪⎬⎫===F FF F F F z yx γβθcos cos cos(3.3)(2)二次投影法如图3-2所示,若已知力F 与坐标轴Oxy 的仰角γ以及力F 在Oxy 平面上的投影xy F 与x 轴间的夹角ϕ,则力F 在三个坐标轴上的投影分别为γϕλϕγsin sin in cos in F F Fs F Fs F z y x ===,,图3-22.合力投影定理 合力在某轴上的投影,等于各分力在同一坐标轴上投影的代数和。
即∑=+++=xixn x x Rx FF F F F 21 同理 ∑∑==ziRz yi RyF F F F ,3.空间共点力系的合成空间共点力系可以合成为一个合力,该合力的作用线通过力系的公共作用点,合力的大小和方向为()()()222∑∑∑++=zyxR F F F F (3.4)()()()⎪⎪⎪⎭⎪⎪⎪⎬⎫===∑∑∑R z R R yRR xRF F F F F F k F j F i F ,cos ,cos ,cos(3.5)(二)空间汇交力系的平衡 1.空间汇交力系的平衡条件空间汇交力系平衡的充要条件是合力等于零,即()()()0222=++=∑∑∑zyxR F F F F2.空间汇交力系的平衡方程根据平衡条件,得到空间汇交力系的平衡方程为⎪⎪⎭⎪⎪⎬⎫===∑∑∑000y x zFFF(3.6)利用上述三个方程,可以求解3个未知量。
静力学第三章

静力学第三章空间力系空间力系是各力的作用线不在同一平面内的力系。
这是力系中最一般的情形。
许多工程结构和机械构件都受空间力系的作用,例如车床主轴、桅式起重机、闸门等。
对它们进行静力分析时都要应用空间力系的简化和平衡理论。
本章研究空间力系的简化和平衡问题,并介绍物体重心的概念和确定重心位置的方法。
与研究平面力系相似,空间力系的简化与平衡问题也采用力系向一点简化的方法进行研究。
第一节空间力的分解与投影一、空间力的分解如图3-1所示,设力F 沿直角坐标轴的分力分别为F x、F y、F z,则(3-1)图3-1力F的三个分力可以用它在三个相应轴上的投影来表示:(3-2)则(3-3)其中i、j、k分别是x、y、z轴的正向单位矢量。
二、空间力的投影1.直接投影法如图3-2所示,若已知力F与空间直角坐标轴x、y、z正向之间夹角分别为α、β、γ,以F x、F y、Fz表示力F在x、y、z三轴上的投影,则(3-4)力在坐标轴上的投影为代数量。
在式(3-4)中,当α、β、γ为锐角时,投影为正,反之为负。
图3-22.二次投影法若力F在空间的方位用图3-3所示的形式来表示,其中γ为力F与z轴的夹角,φ为力F所在铅垂平面与x轴的夹角,则可用二次投影法计算力F在三个坐标轴上的投影。
先将力F向z轴和xy平面投影,得注意:力在平面上的投影F xy为矢量。
再将F xy向x、y轴投影,得因此(3-5)图3-3反之,若已知力在直角坐标轴上的投影,则可以确定该力的大小和方向。
(3-6)其中α、β、γ为力F分别与x、y、z轴正向的夹角。
静力学第三章空间力系第二节力对点之矩与力对轴之矩一、力对点之矩在平面问题中,力F与矩心O 在同一平面内,用代数量M O(F)就足以概括力对O 点之矩的全部要素。
但在空间问题中,由于各力与矩心O所决定的平面可能不同,这就导致各力使刚体绕同一点转动的方位也可能不同。
为了反映转动效应的方位,力对点之矩必须用矢量表示。
第三章 空间力系

Ft tan Fa Ft tan Fr cos
第三章 空间力系
【课堂练习】图示力F作用在A点,此力在x轴、y轴、z轴 上的投影分别是多少?
第三章 空间力系
三、交于一点且互相垂直的三力的合成
力直角平行六面体法则
F=
Fx2 Fy2 Fz2
Fx cosα= F
Fy cosβ= F
第三章 空间力系
(2)力F对各坐标轴之矩为: Mz(F )= Mz(Fx)+Mz(Fy)= -Fx· y+Fy· x= -10.98 N· m Mx(F )=Mx(Fy)+Mx(Fz)= -Fy· z-Fz· y= -105 N· m My(F)=My(Fx)+My(Fz)=Fx· z+Fz· x=53.3 N· m。
解:
(1)确定车刀刀尖为研究对象,以工件主轴为水平轴空间 直角坐标系。
第三章 空间力系
( 2)刀尖受力分析
刀尖受到径向力Fx(沿x轴方向)、轴向力Fy(沿y轴方 向)、圆周力Fz(沿z轴方向)的作用。 (3)用力直角平行六面体法则求合力F 以三力Fx、Fy、Fz为棱边作一直角平行六面体,则此六面 体的对角线即为三力的合力F=19.6 kN
第三章 空间力系 三、空间力系的平衡条件和平衡方程
力矢的主矢和力系对空间任意一点的主矩都等于零。
FR' 0
,
Mo 0
Fy =0 Fy=0 Fz=0 Fz =0 Mx(F )=0 Mz(F )=0
• 空间汇交力系力系 Fx =0 • 空间平行力系力系 Fy=0 • 空间任意力系力系 Fx=0 • 空间力偶系力系
第三章 空间力系 四、空间力系平衡的平面解法
1.确定研究对象,画出受力图。
第三章 空间力系
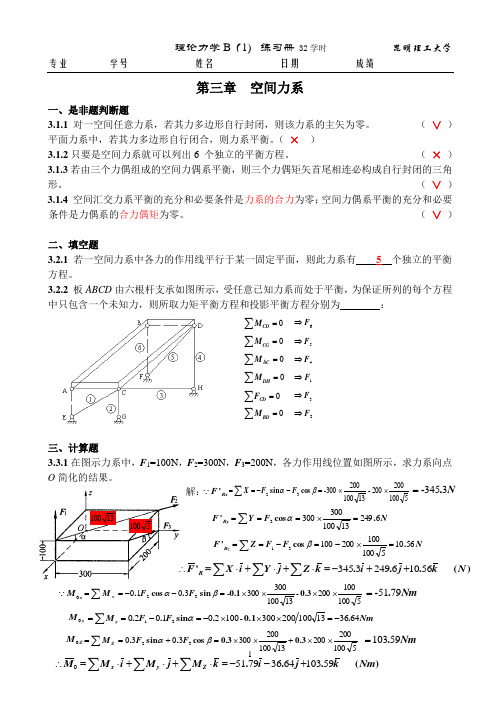
第三章 空间力系一、是非题判断题3.1.1 对一空间任意力系,若其力多边形自行封闭,则该力系的主矢为零。
( ∨ ) 平面力系中,若其力多边形自行闭合,则力系平衡。
( × )3.1.2只要是空间力系就可以列出6 个独立的平衡方程。
( × ) 3.1.3若由三个力偶组成的空间力偶系平衡,则三个力偶矩矢首尾相连必构成自行封闭的三角形。
( ∨ ) 3.1.4 空间汇交力系平衡的充分和必要条件是力系的合力为零;空间力偶系平衡的充分和必要条件是力偶系的合力偶矩为零。
( ∨ )二、填空题3.2.1 若一空间力系中各力的作用线平行于某一固定平面,则此力系有 5 个独立的平衡方程。
3.2.2 板ABCD 由六根杆支承如图所示,受任意已知力系而处于平衡,为保证所列的每个方程中只包含一个未知力,则所取力矩平衡方程和投影平衡方程分别为 :三、计算题3.3.1在图示力系中,F 1=100N ,F 2=300N ,F 3=200N ,各力作用线位置如图所示,求力系向点O 简化的结果。
∑=0CD M 6F ⇒∑=0CG M 5F ⇒∑=0AC M 4F ⇒∑=0DHM 1F ⇒∑=0CDF 3F ⇒∑=0BDM2F ⇒Rx F ' 解: 510013100N 3345.-=51002002001310020030032⨯⨯=--==∑--cos sin βαF F X Ry F 'N F Y 6249131003003002.cos =⨯===∑αRz F 'NF F Z 5610510010020010031.cos =⨯-=-==∑β)(...'N k j i k Z j Y i X F R 561062493345∑∑∑++-=⋅+⋅+⋅=∴x M 0 Nm 7951.-=510010020013100300300301032⨯⨯⨯⨯=--==∑0.3--0.1sin .cos .βαF F M x y M 0Nm F F M y 64361310020030010020102021.0.1-.sin ..-=⨯⨯⨯-=-==∑αZ M 0Nm59103.=200200200300303032⨯⨯+⨯⨯=+==∑0.30.3cos .sin .βαF F M Z3.3.2 如图所示的空间构架由三根杆件组成,在D 端用球铰链连接,A 、B 和C 端也用球铰链固定在水平地板上。
理论力学---第三章 空间力系

B
P
Fz 0 : F cos P 0
E
C
D FD
F
C
z
A y
F
x
P
12
B
3.2 力对点的矩和力对轴的矩
3.2.1 力对点的矩以矢量表示-力矩矢 空间力对点的矩的作用效果取决于: MO(F)
z B F
(1)力矩的大小 (2)转向 (3)力矩作用面方位。
h 这三个因素可用一个矢量 M O (F ) 表示。 x 矢量的方位:与作用平面法线 大小: M O (F ) Fh
例1 重为P的物体用杆AB和位于同一水平面的绳索AC与AD支承,如图。
= 45° 已知:P=1000N,CD=AC=AD,E为CD中点,
不计杆重;求绳索的拉力和杆所受的力。 解:以铰A为研究对象,受力如图。
E
C
D
A
Fx 0 : FC sin FD sin 0
Fy 0: FC cos FD cos F sin 0
齿轮的啮合角(螺旋角) β 和压力角 ,试求力 Fn 沿 x,y 和 z 轴的分力。
6
解: 将力Fn向 z 轴和Oxy 平面投影
Fz Fn sin ,
将力Fxy向x,y 轴投影
Fxy Fn cos
Fx Fxy sin Fn cos sin Fy Fxy cos Fn cos cos
z Fz F B Fy
M z (F ) M O (Fxy ) M O (Fx ) M O ( Fy )
xFy yFx
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
理论力学东北大学理学院力学系张英杰4123空间汇交力系力对点的矩和力对轴的矩空间任意力系向一点的简化· 主矢和主矩空间力偶5空间任意力系的平衡方程6重心2F zyxABC D1F 空间力系:力系各分力的作用线分布在空间,而且不能简化到某一平面的力系。
齿轮传动轴Az F Ay F Cz F CyF⎪⎩⎪⎨⎧===γβαcos ;cos ;cos F F F F F F zy x 直接投影法间接投影法γxyzO FyF zF x F ϕxyF §3-1空间汇交力系一、力在直角坐标轴上的投影β;sin γF F xy =ϕγϕγsin sin ;cos sin ⋅=⋅=F F F F y x ;cos γF F z =⎪⎪⎨⎧=++=⇒F F i F F F F F z y x ),cos(;222方向 大小F j F i F F zy x++=α3-1空间汇交力系二、空间汇交力系的合力与平衡条件合力等于各分力的矢量和,合力作用线过汇交点。
空间汇交力系由组成;n F F F21,i R F F ∑=nF F F +++=21)(111k F j F i F z y x ++=i F F F nx x x )(21+++=kF F F nz z z)(21++++k F j F i F iz iy ix ∑+∑+∑=kF j F i F Rz Ry Rx++=)(k F j F i F nz ny nx++++)(222k F j F i F z y x+++jF F F ny y y)(21++++222)()()(iz iy ix R F F F F ∑+∑+∑=222RzRyRxFF F ++=R iz R R iy R R ix R F F k ,F F F j ,F F F i ,F ∑=∑=∑=)(cos )(cos )(cos 合力的大小合力的方向RRzRRyRRxF F F F F F ===kF j F i F k F j F i F F F Rz Ry Rx iz iy ix i R++=∑+∑+∑=∑=二、空间汇交力系的合力与平衡条件=R F 即空间汇交力系平衡的充要条件:力系的合力等于零—空间汇交力系的平衡方程二、空间汇交力系的合力与平衡条件⎪⎩⎪⎨⎧=∑∑=∑00iziy ix F F F ===⇒000z y x 222)()()(iz iy ix R F F F F ∑+∑+∑=⇒空间汇交力系平衡的解析条件:力系各力在三个坐标轴上投影的代数和分别为零。
例3-1 不计自重的起重杆AB 用球铰链固定在地面上,CD 连线与x 轴平行,CE = EB = DE ,P = 10kN 。
求杆AB 和绳子的受力。
解:⑴取AB 杆和重物为研究对象,画受力图yz xEA BCDF30 30PTDF TCF AF ⑵选坐标系,列平衡方程;54.3kN F F TD TC ==⇒.66.8kN F A =,0=∑z F 045sin 45sin =-TD TC F F ,0=∑x F 030cos 45cos )(30sin =⋅+- TD TC A F F F ,0=∑y F 030sin 45cos )( 30cos =⋅++-TD TC A F F PF一、空间的力对点之矩AB力矩矢)(F M OxyzO Frh方位:与力矩作用面的法线方向相同指向:符合右手螺旋法则|)(|F M Oh F ⋅=OABA ∆=2力矩作用面:力与矩心组成的平面矩心:点O空间的一个力使物体绕某一空间点的作用效果。
模:)(F M O Fr⨯=力作用点的矢径:r—矢量A B)(F M O x yzOFrh x , y , z )ijki F M x O)]([=一、空间的力对点之矩;k z j y i x r++=kF j F i F F z y x ++=Fr F M O ⨯=)(zyx F F F z y x k j i =kyF xF j xF zF i zF yF x y z x y z)()()(-+-+-=kF M j F M z O y O )]([)]([++力对轴之矩可以度量力使刚体绕该轴转动的作用效果。
力与轴在同平面时,力对该轴的矩为零。
二、空间的力对轴之矩—代数量z正负:迎着z 轴,力使物体绕z 轴逆时针转,力矩为正;反之为负。
单位:N · m 或kN · mh OABxyF zF 二、空间的力对轴之矩)(F M z )(xy z F M=)(z z F M +)(xy z F M=h F xy ⋅±=OABA ∆±=2力对轴之矩的绝对值等于力在垂直于该轴的平面上的投影对这个平面与该轴交点之矩。
符合右手螺旋法则。
—代数量=zABh OxyF zF )()()(xy O xy z z F M F M F M ==)()(y O x O F M F M +=x y yF xF -=三、力对点之矩与力对轴之矩的关系z O F M )]([=)()]([F M F M z z O =⇒力对点的矩矢在过该点的坐标轴上的投影等于力对该轴的矩。
—力对轴之矩的解析式力对点之矩的大小力对点之矩的方向余弦|)(|)()(cos |)(|)()(cos |)(|)()(cos F M F M k ,M F M F M j ,M F M F M i ,M O z O O y O O x O ===⎪⎭⎪⎬⎫-=-=-=x y z z x y y z x yF xF F M xF zF F M zF yF F M )()()(===z O y O x O F M F M F M )]()]()]([[[ 222)]([)]([)]([ |)(|F M F M F M F Mz y x O ++=三、力对点之矩与力对轴之矩的关系例3-2手柄ABCD 的上作用一力F ,已知F 与xz 平面平行且与CD 的夹角为α,尺寸如图。
求力在三轴上的投影及对三轴之矩。
解:⑴定义法力在轴上的投影力对轴之矩AB 、BC 、CD 分别与z 轴、y 轴、x 轴平行ααsin ;0;cos ⋅==⋅-=F F F F F z y x =)(F M xbF ⋅)sin (α=)(F M ya F ⋅-)cos (αcF ⋅+)sin (α=)(F MbF ⋅)cos (ααxzAB CDabc yF xF zF ()()k F F F i F F z y xααsin ;0;cos ==-=⑵解析法例3-2手柄ABCD 的上作用一力F ,已知F 与xz 平面平行且与CD 的夹角为α,尺寸如图。
求力在三轴上的投影及对三轴之矩。
ααsin ;0;cos ;;⋅==⋅-===-=F F F F F az b y c x z y x 力对轴之矩y z x zF yF F M -=)(ααsin 0sin Fb a F b =⋅-⋅=zx y xF zF F M -=)(ααααcos sin sin )()cos (Fa Fc F c F a -=---=x y z yF xF F M -=)(ααcos )cos (0Fb F b c =-⋅-⋅-=αx z A BCDa bc yF xF zF3;3FF F F F z y x =-==【课堂练习】3-1 边长为a 的正方体如图所示,沿对角线DA 方向作用一个力,则该力对x 轴的力矩。
FFy x zAD O (a ,a ,0)zF y F xF yz F yz x zF yF F M -=)(303F F a -⋅-⋅=3Fa=a F z ⋅=a F ⋅=32aF yz ⋅=232a F ⋅=)(z x F M =)(yz x F M =xF x O F M )]([ =AFBAr B 'FOBr Ar 力偶对空间任一点的矩矢与矩心无关。
力偶矩矢一、力偶矩以矢量表示,力偶矩矢对刚体的作用效果由力偶矩矢度量。
空间力偶),('F F )('F F M O )()(),(''F M F M F F M O O O +='F r F r B A ⨯+⨯=FF-=Fr r B A⨯-=)(F r BA⨯='Fr AB ⨯=),('F F M MAB'FOBr Ar 决定空间力偶对刚体作用效果的因素:⑴矢量的模,即力偶矩的大小;⑵矢量的方位,与力偶作用面垂直;⑶矢量的指向,与力偶的转向服从右手螺旋法则。
C dMFd M =ABCS ∆=2FBAr 一、力偶矩以矢量表示,力偶矩矢1A 1B Ⅰ2F 1F Ⅱ2A 2B 二、空间力偶等效定理作用在同一刚体上的两个空间力偶,若其力偶矩矢相等,则它们彼此等效。
654321F F F F F F ===== ; 511F F F R +=◆空间力偶可以平移到与其作用面平行的任意平面上,而不改变力偶对刚体的作用效果。
6F 3F 4F 5F O 1R F 2R F422F F F R +=BA '1F 1F 二、空间力偶等效定理2F '2F 'F RF BAr 作用在同一刚体上的两个空间力偶,若其力偶矩矢相等,则它们彼此等效。
◆保持力偶矩矢不变,可同时改变力偶中力与力偶臂的大小,也可在其作用面内任意移转,对刚体的作用效果不变。
1'11),(F r F F M BA ⨯=R BA R R F r F F M⨯=),(')(21F F r BA +⨯=21F r F r BA BA⨯+⨯=1F r BA⨯=),('11F F M =三、空间力偶系的合成与平衡条件1M2M 3M M O 合力偶矩矢= 各分力偶矩矢的矢量和3F1F 2F '2F'3F 2d 3d 1d '1F n M M M M +++=21)(111k M j M i M z y x ++=)()(222k M j M i M k M j M i M nz ny nx z y x+++++++jM M M i M M M ny y y nx x x)()(2121+++++++=k M M M nz z z )(21++++k M j M i M iz iy ix )()()(∑+∑+∑=kM j M i M z y x++=例3-3在工件四个面上同时钻5个孔时,每个孔所受切削力偶矩均为80N ·m ,求工件所受合力偶之矩在三个坐标轴上的投影。
解:把力偶用力偶矩矢表示,并平移到一点zyx A3M 1M 54 M M ix x M M ∑=2M -=mN ⋅-=80iyy M M ∑=45cos 45cos 541M M M ---=m N .⋅-=1193izz M M ∑=45cos 45cos 543M M M ---=mN .⋅-=11932M合力偶矩矢的大小合力偶矩矢的方向空间力偶系平衡的充要条件:合力偶矩等于零—空间力偶系的平衡方程⎪=∑∑=00iz iy ix M M ⎩⎪⎨⎧===∑⇒000z y x M 0=M 三、空间力偶系的合成与平衡条件⎪⎩⎪⎨⎧∑=∑=∑=MM k ,M M M j ,M MM i ,M iz iy ix )(cos )(cos )(cos222][][][iz iy ix M M M M ∑+∑+∑=例3-4已知两圆盘半径均为0.2m ,AB =0.8m , 圆盘O 1⊥y 轴,圆盘O 2⊥z 轴,两盘面上作用有力偶,F 1=3N ,F 2=5N 。