西北工业大学理论力学习题答案(完整资料).doc
理论力学试题及问题详解

理论力学试题与答案一、是非题〔每题2分。
正确用√,错误用×,填入括号内。
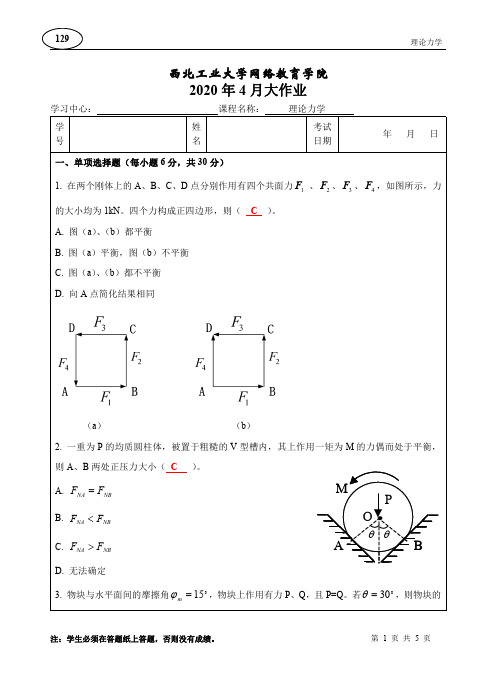
〕1、作用在一个物体上有三个力,当这三个力的作用线汇交于一点时,如此此力系必然平衡。
〔〕2、力对于一点的矩不因力沿其作用线移动而改变。
〔〕3、在自然坐标系中,如果速度υ = 常数,如此加速度α = 0。
〔〕4、虚位移是偶想的,极微小的位移,它与时间,主动力以与运动的初始条件无关。
〔〕5、设一质点的质量为m,其速度 与x轴的夹角为α,如此其动量在x轴上的投影为mv x=mvcos a。
〔〕二、选择题〔每题3分。
请将答案的序号填入划线内。
〕1、正立方体的顶角上作用着六个大小相等的力,此力系向任一点简化的结果是。
①主矢等于零,主矩不等于零;②主矢不等于零,主矩也不等于零;③主矢不等于零,主矩等于零;④主矢等于零,主矩也等于零。
2、重P的均质圆柱放在V型槽里,考虑摩擦柱上作用一力偶,其矩为M时〔如图〕,圆柱处于极限平衡状态。
此时按触点处的法向反力N A与N B的关系为。
①N A = N B;②N A > N B;③N A < N B。
3、边长为L 的均质正方形平板,位于铅垂平面内并置于光滑水平面上,如图示,假如给平板一微小扰动,使其从图示位置开始倾倒,平板在倾倒过程中,其质心C 点的运动轨迹是。
①半径为L/2的圆弧; ②抛物线; ③椭圆曲线; ④铅垂直线。
4、在图示机构中,杆O 1 A //O 2 B ,杆O 2 C //O 3 D ,且O 1 A = 20cm ,O 2 C = 40cm ,CM = MD = 30cm ,假如杆AO 1 以角速度 ω = 3 rad / s 匀速转动,如此D 点的速度的大小为cm/s ,M 点的加速度的大小为cm/s 2。
① 60; ②120; ③150; ④360。
5、曲柄OA 以匀角速度转动,当系统运动到图示位置〔OA//O 1 B 。
AB |OA 〕时,有A V B V ,A αB α,ωAB 0,εAB 0。
理论力学课后习题及答案解析..

第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
西北工业大学 2020年4月 理论力学大作业答案
西北工业大学网络教育学院2020年4月大作业(a )(b )2.一重为P 的均质圆柱体,被置于粗糙的V 型槽内,其上作用一矩为则A 、B 两处正压力大小()。
A.NB NA F F =B.NB NA F F <C.NB NA F F >D.无法确定3.物块与水平面间的摩擦角15=,物块上作用有力状态为(A A.临界平衡状态B.静止(非临界平衡状态)C.滑动状态D.无法确定,它们的方向是(C C 121mL =3mL =48mL =4mL =解:该物体系为平行力系若取整体为研究对象,有三个未知量,不能解出,先取CD 为研究对象。
=∑cm 0412=⋅-+⨯D F M q ()kN M q F D 15241=+==∑yF02=+-D c F q F kNF q F D c 52=-=取AC 为研究对象=∑Bm02122=⋅-⨯-⋅-c A F q F ()kNF q F c A 15-=+-=0=∑yF02='--+c B A F q F F kNF B 40=综上,kN F A 15-=,kN F B 40=,kN F C 5=;kNF D 15=2.直径为cm d 8=的滚子在水平面上只滚动不滑动。
杆BC 一端与滚子铰接,另一端与滑块C 铰接,已知图示位置(杆BC 水平)滚子的角速度为s rad /10=ω,30=α,60=β,cm BC 30=,求BC 杆的角速度和滑块C 的速度。
(23分)∙AO αCBβω。
理论力学课后答案Word版
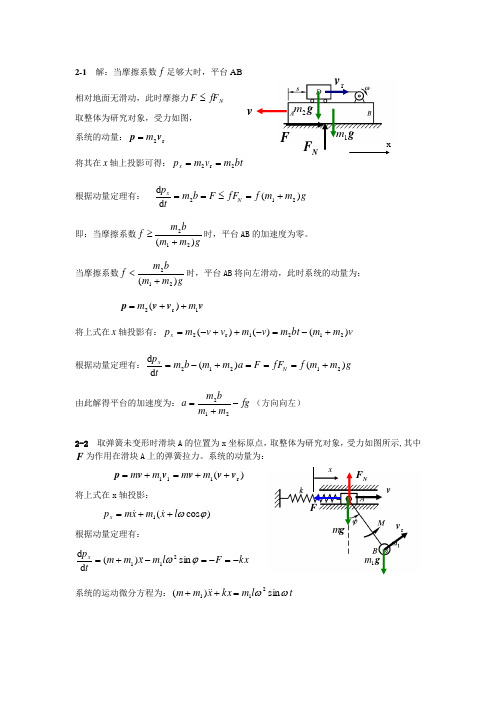
2-1 解:当摩擦系数f 足够大时,平台AB 相对地面无滑动,此时摩擦力N fF F ≤ 取整体为研究对象,受力如图, 系统的动量:r 2v p m =将其在x 轴上投影可得:bt m v m p x 2r 2==根据动量定理有:g m m f fF F b m tp N x)(d d 212+=≤== 即:当摩擦系数gm m bm f )(212+≥时,平台AB 的加速度为零。
当摩擦系数gm m bm f )(212+<时,平台AB 将向左滑动,此时系统的动量为:v v v p 1r 2)(m m ++=将上式在x 轴投影有:v m m bt m v m v v m p x )()()(2121r 2+-=-++-=根据动量定理有:g m m f fF F a m m b m tp N x)()(d d 21212+===+-= 由此解得平台的加速度为:fg m m bm a -+=212(方向向左)2-2 取弹簧未变形时滑块A 的位置为x 坐标原点,取整体为研究对象,受力如图所示,其中F 为作用在滑块A 上的弹簧拉力。
系统的动量为:)(r 111v v v v v p ++=+=m m m m将上式在x 轴投影:)cos (1ϕωl x m xm p x ++= 根据动量定理有:kx F l m xm m tp x-=-=-+=ϕωsin )(d d 211 系统的运动微分方程为:t l m kx x m m ωωsin )(211=++N Fg mg 1mFxvr vvr vN FFg 1mg 2mx2-4 取提起部分为研究对象,受力如图(a)所示,提起部分的质量为vt m ρ=,提起部分的速度为v ,根据点的复合运动可知质点并入的相对速度为r v ,方向向下,大小为v (如图a 所示)。
(a ) (b)根据变质量质点动力学方程有:v vt t t m m t t mρρr r )()(d d )(d d v g F v g F v ++=++= 将上式在y 轴上投影有:)()()()(d d 2r v vgt t F v v g vt t F tvm+-=--=ρρρ 由于0d d =tv,所以由上式可求得:)()(2v vgt t F +=ρ。
理论力学课后习题与答案解析

第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
理论力学习题及答案(全)
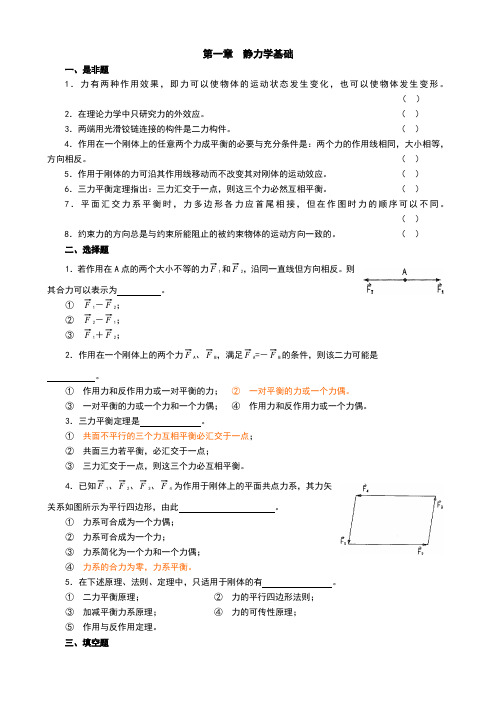
第一章静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
()2.在理论力学中只研究力的外效应。
()3.两端用光滑铰链连接的构件是二力构件。
()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
()6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
()7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
()二、选择题1.若作用在A点的两个大小不等的力F1和F2,沿同一直线但方向相反。
则其合力可以表示为。
①F1-F2;②F2-F1;③F1+F2;2.作用在一个刚体上的两个力F A、F B,满足F A=-F B的条件,则该二力可能是。
①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。
③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。
3.三力平衡定理是。
①共面不平行的三个力互相平衡必汇交于一点;②共面三力若平衡,必汇交于一点;③三力汇交于一点,则这三个力必互相平衡。
4.已知F1、F2、F3、F4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此。
①力系可合成为一个力偶;②力系可合成为一个力;③力系简化为一个力和一个力偶;④力系的合力为零,力系平衡。
5.在下述原理、法则、定理中,只适用于刚体的有。
①二力平衡原理;②力的平行四边形法则;③加减平衡力系原理;④力的可传性原理;⑤作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。
理论力学课本及习题集答案
西北工业大学理论力学教研室
2009年7月
第一章:静力学的基本概念
第二章:平面基本力系
第三章:平面任意力系
第五章:空间基本力系
第六章:空间任意力系
第七章:重 心
第八章:点的运动
第九章:刚体的基本运动
第十章:点的复合运动
日
啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊
第十一章:刚体的平面运动
第十二章:刚体的转动合成
第十四章:质点动力学基础
第十五章:质点的振动
第七章:动能定理
第十八章:动量定理
第十九章:动量矩定理
第二十章:碰撞理论
第二十一章:达朗伯原理
第二十二章:虚位移原理
理论力学课后习题部分答案
B
A FAC FBA
P
(l)
(l1)
(l2)
(l3)
图 1-1
1-2 画出下列每个标注字符的物体的受力图。题图中未画重力的各物体的自重不计,所 有接触处均为光滑接触。
(a)
B
FN1
C
FN 2
P2 P1
FAy
A
FAx
(a2)
(b)
FN1
A
P1
FN
(b2)
C
FN′
P2
(a1)
B
FN1
FN 2
FN
P1
F Ay
FCy
FAx (f2)
C FC′x
FC′y F2
FBy
FBx B (f3)
FAy A FAx
FB
C B
(g)
FAy
FAx A
D FT C FCx
(g2)
FB
B
F1
FB′ B
FAy
A
FAx
(h)
(h1)
P (g1)
FC′y
FT
C
FC′x
P (g3)
D
FCy
FB
F2
C FCx
B
(h2)
A FAx
FAy
FCy
D FAy
A
FAx
(k3)
6
FB
F1
FB′
B B
FD D
(l) FD′ D
A FA
(l1) F2
C
FC (l2)
F1
D
F2
B
A
E
FE
FA
(l3) 或
F1
FB′
理论力学(答案)西北工业大学
10.69kN
* 亦可用直接投 影法求 F3 y、F3 z。
10
第三节 力对点之矩、力对轴之矩 一、力对点之矩 1.平面力对点之矩 力对点之矩是力使刚体绕一点转动 效应之度量,简称力矩,为代数量。 力矩计算式:MO(F)=±Fd O:矩心;d:力臂,矩心至力作用
O(矩心) d (力臂) F
线的距离。
用合力矩定理, D M O Fn M O Ft M O Fr Ft 2 D Fn cosα 75.2 N m 2
14
D cosα 2
2.空间力对点之矩
空间力F与矩心O确定一平面,在此平 面内F对O点之矩即为空间力对点 之矩。 因为F在空间的方位是任意的 ,故空间 力对点之矩要用由矩心 O画出的定位矢量 M O ( F )表示。
正交分解。
6
推论2(三力平衡汇交定理) 刚体受同平面内互不平行三 力作用而平衡时,三力作用线必汇交于一点。
F2 A2 A1 F1 F2 A2 A2 F2
O
A2 F R1 A1 F1
A3 F3
=
F3
O A3
A1
F1
=
F3
O A3
=
F3
O A3
F R1 A1
4.作用与反作用定律 两物体间相互作用的一对力,等值、反向、共线,同时存在, 分别作用于两物体上。 5.刚化原理 变形体在某力系作用下处于平衡,如将此变形体刚化为刚体,
* 注意力矩的正负和单位 。
O
3m
F2
F
30°
A
1m
F1
13
例补1-3 作用于齿轮的啮合力Fn =1000N,齿轮节圆直径
D=0.16m,压力角(啮合力与齿轮节圆切线间的夹角)=20°。 求啮合力Fn对轮心O之矩。
西北工业大学级《力学》期末考试试卷(西北工业大学级《力学》期末考试标准答案及评分标准可在文
诚信保证
本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
本人签字:
编号:
西北工业大学期末考试试题(卷)
2008~2009学年第一学期
开课学院理学院课程力学学时60
考试日期2009年1月12日考试时间2小时考试形式(闭)(A)卷
班级学号姓名
重要提示:
1.本试卷分为“单选题”、“填空题”和计算题三部分,总分为100分;2.在答题卡上答题,最后把试卷和答题卡一并交回;
3.答题卡分为两张,答题卡(1)为机读卡,答题卡(2)为书写卡;4.机读卡中数字用钢笔填写,涂点用2B铅笔填涂。
填空题答案栏每格填1位数字,小数点单独占1格,左对齐填写,按要求取位,4舍5入进位;5.题中所涉重力加速度g一律取9.8 m/s2计算;
6.草稿纸不再另发,将试题的背面作为草稿纸,
一、单选题(共30分,每小题3分,在答题卡(1)上完成)
1.对于惯性参考系,下列那项叙述是正确的?(a)在惯性参考系物体所受合力为零,则该物体保持静止或匀速运动的状态;(b)在任何惯性参考系所描述的物理现象都是相同的;(c)两不同惯性参考系间的相对运动,不一定是匀速运动。
A.abc皆正确;B.只有ab正确;
C.只有bc正确;D.只有ac正确。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章:静力学的基本概念
第二章:平面基本力系
第三章:平面任意力系
第五章:空间基本力系
第六章:空间任意力系
第七章:重 心
第八章:点的运动
第九章:刚体的基本运动
第十章:点的复合运动
第十一章:刚体的平面运动第十 Nhomakorabea章:刚体的转动合成
第十四章:质点动力学基础
第十五章:质点的振动
第十七章:动能定理
第十八章:动量定理
第十九章:动量矩定理
第二十章:碰撞理论
第二十一章:达朗伯原理
第二十二章:虚位移原理