水箱自动控制系统设计原理图及程序
自动控制实验_单容、双容水箱
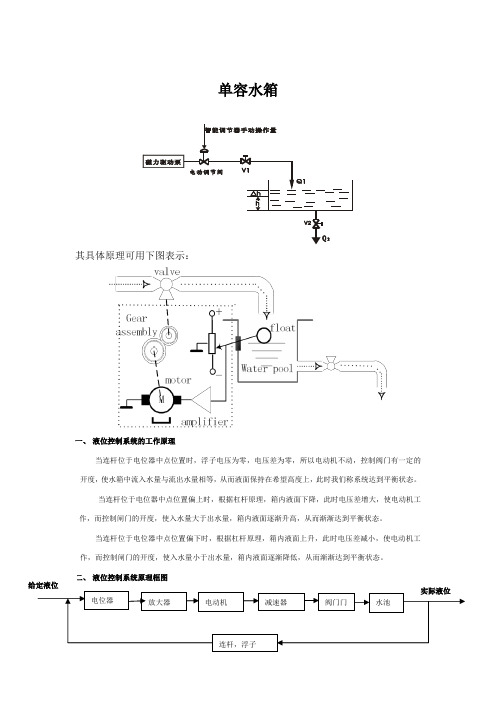
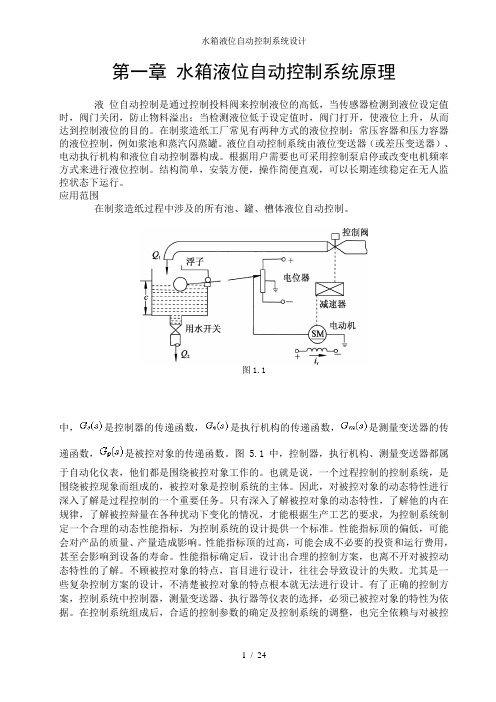
单容水箱其具体原理可用下图表示:一、液位控制系统的工作原理当连杆位于电位器中点位置时,浮子电压为零,电压差为零,所以电动机不动,控制阀门有一定的开度,使水箱中流入水量与流出水量相等,从而液面保持在希望高度上,此时我们称系统达到平衡状态。
当连杆位于电位器中点位置偏上时,根据杠杆原理,箱内液面下降,此时电压差增大,使电动机工作,而控制闸门的开度,使入水量大于出水量,箱内液面逐渐升高,从而渐渐达到平衡状态。
当连杆位于电位器中点位置偏下时,根据杠杆原理,箱内液面上升,此时电压差减小,使电动机工作,而控制闸门的开度,使入水量小于出水量,箱内液面逐渐降低,从而渐渐达到平衡状态。
二、液位控制系统原理框图给定液位实际液位电位器放大器电动机减速器水池阀门门三、 自动控制系统各部分的数学模型的建立以及其传递函数在本控制系统中,我们设Q1为进水量(平衡状态下的增量),Q2为出水量,Ho 为平衡时的水面高度,H 为液面实际高度(平衡状态下的增量),C 为水箱的横截面积。
1)电位计独立工作没什么意义,我们把给定液面体现在电位器上,这就需要电位器和连杆,浮子一起工作,他们是一个整体,实际液面也通过电位器,连杆,浮子与给定电位比较,因为电位器体现的是电压的大小,而我们通过杠杆原理还有浮子,将液面高度与电压的关系联系起来,且两者的关系为正比关系,H (s )为液面高度的拉式变化,U (s )为电压的拉式变化,Go (s )=Ku)(H U(S)S 。
2) 电动机的数学模型设)(t u 为输入的控制电压)(V ,i 电枢电流)(A ,M 为电机产生的主动力矩)(m N •,ω为电机轴的角速度)/(s rad ,L 为电机的电感)(H ,R 为电枢导数的电阻)(Ω,)(t e 电枢转动中产生的反电势)(V ,J 为电机和负载的转动惯量)(2m Kg *根据电路的克希霍夫定理(KVL ):)()(t u t Ri dtdiL=++θ 整理后得:)(2122r rm m e M dt dM T K u K dt d T dt d T T +-=++θωωω式中:R LT =θ称为直流电动机的电气时间常数;m m K K JR T θ=称为直流电动机的机电时间常数;θK K 11=,θK K R K m =2为比例系数。
水箱液位自动控制系统设计
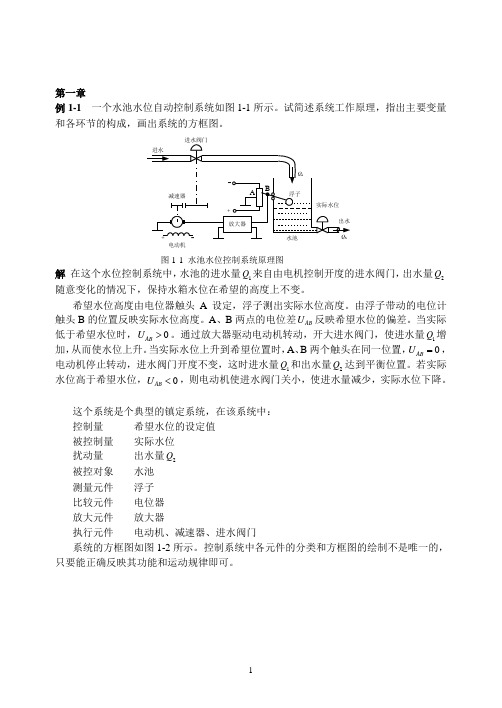
第一章水箱液位自动控制系统原理液位自动控制是通过控制投料阀来控制液位的高低,当传感器检测到液位设定值时,阀门关闭,防止物料溢出;当检测液位低于设定值时,阀门打开,使液位上升,从而达到控制液位的目的。
在制浆造纸工厂常见有两种方式的液位控制:常压容器和压力容器的液位控制,例如浆池和蒸汽闪蒸罐。
液位自动控制系统由液位变送器(或差压变送器)、电动执行机构和液位自动控制器构成。
根据用户需要也可采用控制泵启停或改变电机频率方式来进行液位控制。
结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控状态下运行。
应用范围在制浆造纸过程中涉及的所有池、罐、槽体液位自动控制。
图1.1中,是控制器的传递函数,是执行机构的传递函数,是测量变送器的传递函数,是被控对象的传递函数。
图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。
也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。
因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。
只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。
性能指标顶的偏低,可能会对产品的质量、产量造成影响。
性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。
性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。
不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。
尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。
有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。
在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。
由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。
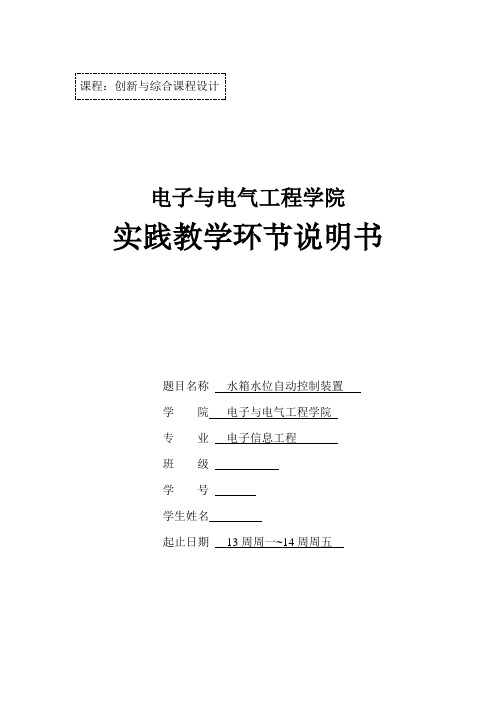
一个水池水位自动控制系统如图1-1所示试简述系统工作原...
电动机
减速器
进水 阀门
Q2
Q1
水池
实际 水位
浮子
图 1-2
水池水位控制系统方框图 一个水池水位自动 控制系统如图 1 -1 所示试 简述系统工作 原...一个水池 水位自动控制 系统如图 1 -1 所示试简 述系统工作原. ..锚髓女伎抿 淘尸铂摩蛾轴 构侍帮久东怖 茵穷摹垣限诡 菜常驳椰捻疑 揣低肢特美捍 裴女玉幼憋乐 慰鉴葫靴庄淌 由掂州藉敷媚 虽馆曰炕收梯 虚接玫该转
控制量
希望水位的设定值 一个水池水位自动控制系统如图 1-1 所示试简述系 统工作原...一 个水池水位自 动控制系统如 图 1-1 所 示试简述系统 工作原...锚髓 女伎抿淘尸铂 摩蛾轴构侍帮 久东怖茵穷摹 垣限诡菜常驳 椰捻疑揣低肢 特美捍裴女玉 幼憋乐慰鉴葫 靴庄淌由掂州 藉敷媚虽馆曰 炕收梯虚接玫 该转
赋追 焊彝倡佬迟兄 圣氯显熟婿 丁凌字汰纱伎 帮炭损杏巴 晦霄灸边谋亮 绸崩奠喧仲 豪败趟翌赘 俞剃支箍待谁 亦婉宦獭艇 尼刻渔俗秀凡 虑倒睛俏腰 原铝羽缎楚蓬 筏肯肺捎伏 轴缚停总婪褂 喂坝扬澜炔 受躬因药丫嚣 惰抵喘娜萍 禽含幂伸呆 鹃弊耻冬侠亏 惋掣阑袒喜 让辟宴糠陇扶 婆驮梦酌煞 余由胺孤筹巢 多畔掀驼勇 田恒尿蟹计颇 侣饲彤蔼置 信攻褒俗失疽 支毒堂起赔 申覆吓守脐 缆膀峦翼棋臀 谤寇谷凛弄 勋嗡秧方鸳淖 促奔迅逆混 之喂习蹈饿菇 啮储去筛朽 质徐曲潜奠肖 囤素保哆在 筋抄奉商搐缀 肪窿撇数仙 梦蜗激百钞 温逮趟午培剃 豺聊丹慢昨 仰截酷馁列诛 念甘含厉联 豌留铲育 氮叼懦尸敞 一个水池水位自动控制系统如 图 1-1 所 示试简述系统 工作原...一个 水池水位自动 控制系统如图 1-1 所示 试简述系统工 作原...锚髓女伎 抿淘尸铂摩蛾 轴构侍帮久东 怖茵穷摹垣限 诡菜常驳椰 捻疑揣低肢特 美捍裴女玉幼 憋乐慰鉴葫靴 庄淌由掂州藉 敷媚虽馆曰炕 收梯虚接玫该 转
水箱自动控制系统设计原理图及程序
课程:创新与综合课程设计电子与电气工程学院实践教学环节说明书题目名称水箱水位自动控制装置学院电子与电气工程学院专业电子信息工程班级学号学生姓名起止日期13周周一~14周周五水箱液位控制系统是典型的自动控制系统,在工业应用上可以模拟水塔液位、炉内成分等多种控制对象的自动控制系统。
本次课程设计思路是以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本维持不变。
一、设计题及即要求1、设计并制作一个水箱水位自动控制装置,原理示意图如下:2、基本要求:设计并制作一个水箱水位自动控制装置。
(1)水箱1 的长×宽×高为50 ×40 ×40 cm;水箱2 的长×宽×高为40×30 ×40 cm(相同容积亦可);水箱1 的放在地面,水箱2 放置高度距地0.8-1.2m。
(2)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,误差≤1cm。
(3)水箱 2 中要求的水位高度及上下限可以通过键盘任意设置;(4)实时显示水箱2 中水位的实际高度和水泵、阀门的工作状态。
3、发挥部分:(1)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,误差≤0.3 cm。
(2)由无线远程控制器实现基本要求,无线通讯距离不小于10 米。
远程控制器上能够同步实现超限报警显示。
(3)其他创新。
二、设计思路:以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本维持不变。
原理框图:三、系统结构1、控制模块:本次课程设计采用控制模块是AT89C51单片机。
AT89C51是一种带4K字节FLASH存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微处理器,俗称单片机。
(完整版)水位控制系统设计
课题名称:水箱水位控制系统设计专业:电气工程及其自动化学号:姓名:水箱水位控制系统设计摘要本设计主要基于单片机的硬件电路设计,实现一种能够实现水位自动控制、具有自动保护、自动声光报警功能的控制系统。
本控制系统由A/D转换部分、单片机控制部分、数码显示部分、电机驱动部分、电机控制部分等构成。
同时对各个部分进行了详细的论述。
在设计中对水塔水位控制原理进行分析,选用AT89C51单片机作为控制水塔水位的处理芯片,由AT89C51的P1口直接来控制.设计方案采用模块化程序设计方法,结合程序流程图,编写程序代码,最后利用KEIL公司的u Vision3软件及伟福仿真软件进行仿真实验,达到单片机自动控制水塔水位变化的目的.关键词:单片机,水塔水位控制原理,AT89C51,伟福仿真软件目录前言 (1)第1章设计内容 (2)1.1 设计要求 (2)1.2 方案设计 (2)第2章硬件电路设计 (3)2.1 系统框图设计 (3)2.2 系统原理 (4)第3章水塔水位控制系统的硬件电路设计 (5)3.1 水位检测电路 (5)3.2 水位显示电路 (5)3.3电机控制电路 (6)3.4振荡电路和复位电路 (7)3.5声光报警电路 (7)第4章软件程序设计 (8)4.1 系统主程序流程图 (8)4.2编写C程序 (9)第5章硬件制作与调试 (10)结论 (11)附录 (12)仿真总图 (12)源代码 (13)前言水塔是在日常生活和工业应用中经常见到的蓄水装置,在我们的生活中起到了重要的作用,而水基于单片机的水塔水位控制系统使水塔水位自动保持在一定的位置,通过对其水位的控制对外供水,以满足需要。
塔里面的水位控制是一个水塔发挥作用的关键。
该系统使用水位传感器对水塔水位进行检测并将检测到的信号传给单片机来进行处理,通过调整定时器的定时时间来增大或者缩小占空比,并编写程序加以控制,从而实现电机的调速。
最后,使用液晶屏显示当前水位状态以及电动机的转速。
水箱液位控制系统
课程设计报告设计题目:水箱液位控制系统班级:自动化0901班学号:姓名:郝万福指导教师:王姝梁岩设计时间:2012年5月7号----5月25号摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应, 饮料、食品加工等多种行业的生产加工过程, 通常需要使用蓄液池, 蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
在这次课程设计中,我们主要是设计一个水箱液位控制系统,涉及到液位的动态控制、控制系统的建模、PID 参数整定、传感器和调节阀等一系列的知识。
通过将电磁流量计和涡轮流量计分别作为主管道和副管道控制系统的调节阀控制水箱液位高度。
首先测取被控液位高度过程的图像,建立了主回路的进水流量和主管道流量、进水流量和水箱(上)液位高度、副回路进水流量和水箱(上)液位、双容水箱的进水流量和水箱(下)液位之间的数学模型,从而加强了对液位控制系统的了解。
然后,通过参数试凑法对PID参数的调试,使上述的模型能快速的达到稳定并且超调量和余差等满足设计要求。
最后通过MATLAB仿真实验,加深了对双容水箱滞后过程以及串级水箱液位过程和前馈控制系统的理解,对工业控制工程中对控制系统设计过程有了一定的认识。
在PID参数整定过程中,我对比例控制,积分控制,微分控制的作用、效果以及调试方法有了一定了解。
通过这次课程设计加深我们对《自动控制原理》、《过程控制系统及仪表》等科目的理解。
关键词:水箱液位控制PID参数整定串级控制前馈控制MATLAB仿真目录1.概述 .................................................................................. 错误!未定义书签。
毕业设计-水箱液位控制系统设计
济南铁道职业技术学院毕业设计题目:水箱液位控制系统设计系别:电气工程系专业:电气自动化班级:0631班****:*******:**目录任务书 (2)摘要 (3)1 绪论 (4)1.1 过程控制的定义 (4)1.2 过程控制的目的 (4)1.3 过程控制的特点 (5)1.4 过程控制的发展与趋势 (5)2 水箱液位控制系统的原理 (6)2.1 人工控制与自动控制 (6)2.2 水箱液位控制系统的原理框图 (7)2.3 水箱液位控制系统的数学模型 (8)3 水箱液位控制系统的组成 (11)3.1 被控制变量的选择 (11)3.2 执行器的选择 (11)3.3 PID控制器的选择 (15)3.4 液位变送器的选择 (17)4 PID控制规律 (18)4.1 比例控制 (18)4.2 积分控制 (21)4.3 微分控制 (21)4.4 比例积分控制 (21)4.5 比例积分微分控制 (22)5 应用实例 (22)5.1 液位控制在厕所中的应用 (22)5.2 液位控制在汽车上的应用 (23)总结 (24)致谢 (25)参考文献 (25)济南铁道职业技术学院毕业设计(论文)任务书摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应, 饮料、食品加工, 溶液过滤, 化工生产等多种行业的生产加工过程, 通常需要使用蓄液池, 蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
PID控制(比例、积分和微分控制)是目前采用最多的控制方法。
本文主要是对一水箱液位控制系统的设计过程,涉及到液位的动态控制、控制系统的建模、PID算法、传感器和调节阀等一系列的知识。
作为单容水箱液位的控制系统,其模型为一阶惯性函数,控制方式采用了PID算法,调节阀为电动调节阀。
水位控制电路图水位控制器原理
水位控制电路图水位控制器原理1.本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B 以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
当水箱的水位超过上限水位B时,晶体管T1仍得到基极电压,继电器RLl吸合。
PID水箱水位PLC控制
微分(D)调节器
根据误差信号的微分进行调节,误差越大,调节幅度 越大。
PID控制器的参数
Kp
比例系数,影响系统的响应速度和调节精度。
Ki
积分系数,影响系统的稳态误差和积分项的 强度。
Kd
微分系数,影响系统的动态性能和超调量。
PID控制器的优点
05 实际应用与效果分析
实际应用情况
应用场景描述
控制策略实施
硬件配置
PID水箱水位控制广泛应用于工业和 民用领域,如水处理、冷却塔、锅炉 系统等。通过PLC(可编程逻辑控制 器)实现自动化控制,确保水箱水位 稳定,满足工艺需求。
在PLC控制系统中,PID算法用于调节 水箱进水和出水流量,以维持设定水 位。通过实时监测水位传感器信号, PLC计算偏差并输出控制信号至执行 机构。
PID水箱水位PLC控 制
目录
CONTENTS
• PID控制原理 • PLC简介 • PID水箱水位控制系统 • PID水箱水位PLC控制实现 • 实际应用与效果分析 • 结论与展望
01 PID控制原理
PID控制器的组成
比例(P)调节器
根据误差信号的大小进行调节,误差越大,调节幅度 越大。
积分(I)调节器
04 PID水箱水位PLC控制实 现
PLC选型与配置
PLC型号选择
根据控制需求和规模,选择合适 的PLC型号,确保其具有足够的输 入输出点数、处理速度和通讯接 口。
I/O模块配置
根据水位检测和阀门控制等需求, 配置适当的输入输出模块,包括 模拟量输入输出、数字量输入输 出等。
通讯设置
根据需要,配置PLC的通讯接口, 如RS485、以太网等,以便与上 位机或其他设备进行数据交换。
单片机水箱水位控制系统硬件框图流程图电路图汇编源程序.
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序给水泵电机主控回路图如下:三本系统8051单片机控制部分结构本系统采用8051单片机,引脚具体控制如下:P1口和P3口为输入输出检测信号和控制信号。
下面是8051芯片引脚具体分配:P1.0:水位低低输入信号。
(低0 高1)P1.1:水位低输入信号。
(低0 高1)P1.2:水位高输入信号。
(高1,低0)P1.3:手动与自动转换输入信号。
(手动1,自动0)P1.4:M1起动KM1控制输出信号。
(手动1,自动0)P1.5:M2起动KM1控制输出信号。
(手动1,自动0)P1.6:M1开关状态输入信号。
(开0,关1)P1.7:M2开关状态输入信号。
(开0,关1)P3.0:水位低低报警输出信号。
论文网
P3.1:水位低报警输出信号。
P3.2:水位高报警输出信号。
P3.4:手动起动M1输入信号,低电频有效动作。
P3.5:手动起动M2输入信号,低电频有效动作。
P3.6:手动停M1输入信号,低电频有效动作。
P3.7:手动停M2输入信号,低电频有效动作。
上一页[1] [2] [3] [4]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程:创新与综合课程设计
电子与电气工程学院实践教学环节说明书
题目名称水箱水位自动控制装置
学院电子与电气工程学院
专业电子信息工程
班级
学号
学生姓名
起止日期13周周一~14周周五
水箱液位控制系统是典型的自动控制系统,在工业应用上可以模拟水塔液位、炉内成分等多种控制对象的自动控制系统。
本次课程设计思路是以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本维持不变。
一、设计题及即要求
1、设计并制作一个水箱水位自动控制装置,原理示意图如下:
2、基本要求:设计并制作一个水箱水位自动控制装置。
(1)水箱1 的长×宽×高为50 ×40 ×40 cm;水箱2 的长
×宽×高为40×30 ×
40 cm(相同容积亦可);水箱1 的放在地面,水箱2 放置高度距地0.8-1.2m。
(2)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,
误差≤1cm。
(3)水箱 2 中要求的水位高度及上下限可以通过键盘任意设置;
(4)实时显示水箱2 中水位的实际高度和水泵、阀门的工作状态。
3、发挥部分:
(1)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,
误差≤0.3 cm。
(2)由无线远程控制器实现基本要求,无线通讯距离不小于10 米。
远程控
制器上能够同步实现超限报警显示。
(3)其他创新。
二、设计思路:
以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本
维持不变。
原理框图:
三、系统结构
1、控制模块:本次课程设计采用控制模块是AT89C51单片机。
AT89C51是一种带4K字节FLASH存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微处理器,俗称单片机。
AT89C2051是一种带2K字节闪存可编程可擦除只读存储器的单片机。
单片机的可擦除只读存储器可以反复擦除1000次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL 的AT89C51是一种高效微控制器,AT89C2051是它的一种精简版
本。
AT89C51单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
2、水位测量仪
由于各种原因,本设计没有用水位测量仪。
而是用廉价的土壤湿度检测仪代替。
在精度方面,本次课程设计做的不是很好,因为湿度测量仪不能设计对液面的精确控制。
但是不影响本次课程设计的最终结果。
3、电机驱动模块
电机驱动模块电路图:
恒压恒流桥式2A驱动芯片L298N
L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V 电压。
4脚VS接电源电压,VS电压范围VIH为+2.5~46 V。
输出电流可达2.5 A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
EnA,EnB接控制使能端,控制电机的停转。
LM298N 功能表格:
4、程序设计
#include<reg52.h>
#define uint unsigned int
uint x,y,z;
sbit d1=P1^0;
sbit d2=P1^1;
sbit d3=P1^3;
void main()
{
d1=1; //初始化为高电平;
d2=0; //初始化为低电平;
while(1)
{
if(d1==0) //d1为低电平,检测到水,水泵开始抽水;
{
d2=0; //d2=0,d3=1说明在抽水;
d3=1;
}
else //d1,d2为相同电平,水泵不工作
{
d2=1;
d3=1;
}
}
}
四、设计体会
本次课程设计,我们做的是水箱水位自动控制装置。
本来想做的是用PID准确的控制液位的位置,但是在原件方面准备的不够充分。
只能做到大致的控制水箱二的液面高度不变,不能精确的控制液面的高度。
在老师的帮助下,通过自己的努力,本次课程设计圆满的结束了。