液压挖掘机铲斗轨迹控制
现代挖掘机的液压操纵和控制系统

— I
■ 广 东江 门/ 艳 肖
, “ , Ⅲ l
液压挖掘机 的作业操纵 系统
现代液压挖掘机 的作业操纵 系 统是 用来完成挖 掘作业 中各种动作
的操 纵 ,它是挖 掘机 的主要操纵 系 统。液压挖掘机挖 掘作业过 程 中主
3 . 机械操纵系统
目前许多液压挖 掘机 采用机械 操纵 系统 ,其优点是结 构简单 ,工
配阀滑阀的 移动, 也是用液压导向
而进行 间接控 制的 ,所不 同的是 采 用了减压式先导阀。
速的调节。目 前应用在液压挖掘机
柴 油机上的控制装 置有 电子功率优 化 系统 、 自动怠速装 置、电子调速
在2 ~4 mm之间 。前 、后 终点之 0 0 间 的操 纵 手 柄总 移 动 量 不应 超 过
30 m 4 m
o
其变量摆角来实现的
。
对
,
过节 调
根据控制形
液压挖 掘机的全 自动化 。人们对液 压挖掘机 的研究 ,逐步 向机 电液控 制 系统方 向转移 ,使挖掘机 由传统 的杠杆操纵逐 步发展到液压操纵 、 气压操纵 、电气操纵 、液压伺服 操 纵 、无线 电操纵 、电液比例操纵 和 计算 机直接操纵 。所以 ,对挖掘机 的机 电液一体化 的研 究 ,主要集 中 在液压挖掘机 的控制 系统上 。
压力发生式和 减压阀式两种 。压力 发 生式先导 阀操纵 ,这是一种远 距 离操 纵阀 ,驾驶 员利用先导 阀的压 力油 来操纵主分 配阀 ;减压 阀式先 导 阀操纵 ,与上述 的压 力发生式先 导阀操纵 一样 ,这种操纵 装置主分
功 率就增加 ( 小) 或减 ,由于输 出转 矩 基本 不变 ,所以柴油机 转速 也增 加( 或减小 ) 不同的节 气门开度 ,即 对应着不 同的柴油机转速 。由此可 见 ,对柴油机控 制的 目的是 ,通过 对油门开度 的控 制来 实现柴油机转
【精编完整版】液压挖掘机工装轨迹控制及仿真技术研究毕业论文

(此文档为word格式,下载后您可任意编辑修改!)综合课程设计II项目总结报告题目:液压挖掘机工装轨迹控制及仿真技术研究院(系)机电工程学院专业机械设计制造及其自动化学生学号班号指导教师填报日期2013年12月5日哈尔滨工业大学机电工程学院制2013年11月说明一、总结报告应包括下列主要内容:1.项目背景分析;2.研究计划要点与执行情况;3.项目关键技术的解决;4.具体研究内容与技术实现;5.技术指标分析;6.存在的问题与建议。
二、总结报告由指导教师填写意见、签字后,统一交所在院(系)保存,以备检查。
指导教师评语:指导教师签字:检查日期:哈尔滨工业大学课程设计任务书目录第一章挖掘机工装轨迹控制的机电液系统介绍 (1)1.1单斗液压挖掘机的机械模型简介 (1)1.2电液控制系统的组成 (2)第二章液压挖掘机工装轨迹的运动学分析 (4)2.1运动学问题 (4)2.2 运动学逆问题 (6)第三章液压挖掘机液压系统的建模分析 (9)3.1斗杆液压缸的传递函数 (9)3.2动臂液压缸的传递函数 (10)3.3其它环节传递函数 (10)3.4斗杆系统的整体建模与仿真 (12)3.5 动臂系统的整体建模与仿真 (14)第四章控制系统的电路设计 (17)4.1角度传感器的选择 (17)4.2 数据采集电路 (18)4.3 DA转换器及接口电路 (18)4.4 控制系统的电路原理图设计 (19)第五章控制方法的选择及MATLAB仿真技术 (21)5.1 计算机实现PID控制 (21)5.2 斗杆系统PID控制仿真 (22)5.3 动臂系统PID控制仿真 (25)参考文献 (29)第一章挖掘机工装轨迹控制的机电液系统介绍1.1单斗液压挖掘机的机械模型简介本次课程设计的液压挖掘机是针对学校的实验室用的样机模型,其容量为0.01立方米,动臂和斗杆为四连杆机构,动臂、斗杆和铲斗均由液压缸驱动,它们之间以销轴连接。
在动臂和斗杆的销轴上分别安装了角度传感器,用以检测相对位角。
液压挖掘机工作装置的轨迹实现研究
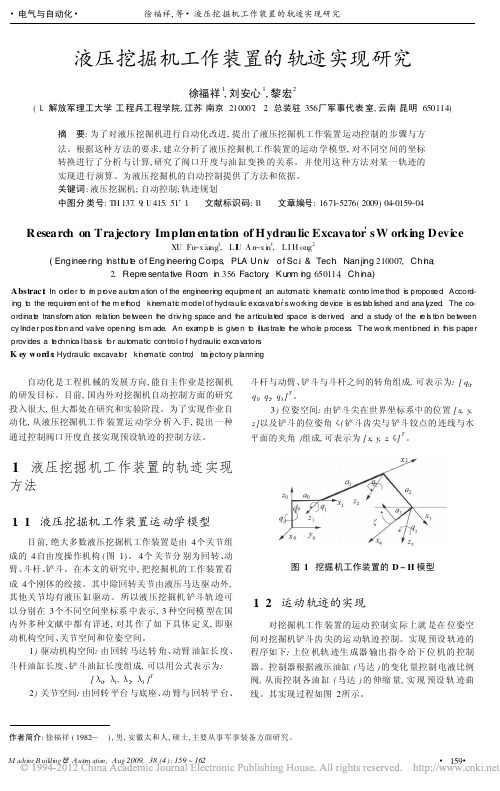
上式中 , 各符号的意义如下 : x, y, z 和 是铲斗齿尖的三维笛卡 儿坐标和铲斗的姿 态角 : 逆时针的方向为负 , 顺时针为正。 K 1, k2, k3 取整数, 使 qi 的值落在 ( - , )区间 ( i= 0 ,1 ,2 , 3)。 xy3 = l13 = x2 + y 2 + a 3 cos z3 = z + a3 sin
2 2 a2 z - d0 1 + l13 - a2 + a rc tan 3 + 2k1 2a 1 l13 xy3 - a0 2 2 a2 1 + a 2 - l13 + 2k2 2a 1 a2
+ arccos
q3 = a rccos
2 2 a2 z - d0 2 + l13 - a1 - a rc tan 3 - + 2k3 2a 2 l13 xy3 - a0
( z3 - d 0 ) 2 + ( xy3 - a 0 ) 2
2 . 3 驱动机构空间和关节空间的变换
图 3 轨迹曲线的离散转换图 驱动空间和关 节空间的变换的表达式为 : [ 0, 1 , 2, 3 ] [ q0, q1, q2, q3 ] 建立驱动机构空间变量 与关节空间变量之间的关系 ,
2 自动控制中的数据计算
1 . 2 运动轨迹的实现
对挖掘机工作 装置的运动 控制实 际上就 是在 位姿空 间对挖掘机铲斗齿 尖的运 动轨迹 控制。实现 预设 轨迹的 程序如下 : 上位 机轨 迹生 成器 输出 指令 给下 位 机的 控制 器。控制器根据液压油缸 (马达 ) 的变化 量控制 电液比例 阀 , 从而控制 各油 缸 ( 马达 ) 的 伸缩 量 , 实 现 预设 轨 迹曲 线。其实现过程如图 2 所示。
液压挖掘机工作装置运动轨迹自动绘制
以 MA L B 的 G D TA UIE向导 开发应用程序界 面, 根据上述公式编写 m文件 ,求解斗尖运动轨迹 。使液
( )整 机 的作 业 范 围 。 3 整机 的作 业 范 围 是 动臂 液 压 缸 长 L 、斗 杆 液
压挖掘机工作装 置综合 优化 C D系统 软件完全 借助 A
动臂 的瞬时 转角方 程为
8 0
)
[ 通讯地址]郑家坤 ,西南交通大学机械工程学院 2 6信箱 5
建筑 札拭 20.5( 080 上半月刊)
维普资讯
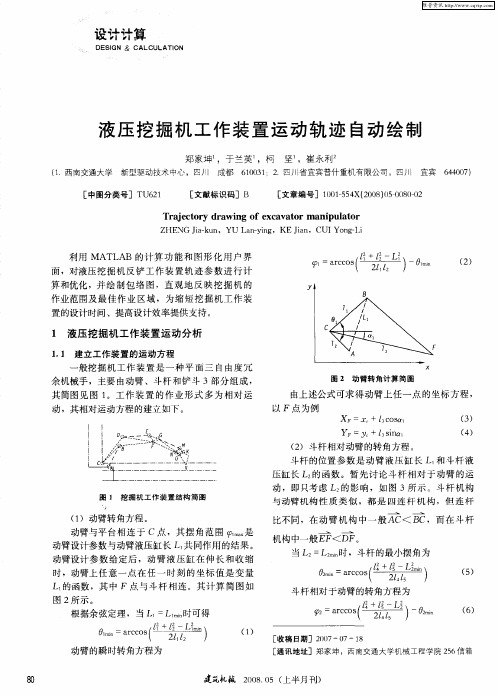
F : D .源自 B () 9 E l
:
£ F
(0 1)
2 运动轨迹 ( 包络 图)及计算结果可视化
Z NG Jak n HE i u ,YU a - ig — L n yn ,KE Ja ,C o g I in UIY n - i
利用 MAT AB的 计 算 功 能 和 图形 化 用 户 界 L
面,对液压挖掘机反铲工作装置轨迹参数进行计
算和优 化 ,并 绘 制 包 络 图 ,直 观地 反 映 挖 掘 机 的 作业范 围及 最 佳 作 业 区域 ,为 缩 短 挖 掘 机 工 作 装 置 的设 计时 间、提高设 计效率 提供支 持 。
动 ,即 只考 虑 L 的影 响 ,如 图 3所 示 。斗 杆 机 构
图 1 挖 掘 机 工 作 装 置 结 构 茼 图
与动臂 机构 性 质 类 似 ,都 是 四连 杆 机 构 ,但 连 杆
()动臂转 角方程 。 1 动臂与平 台相 连 于 C点 ,其 摆 角 范 围 是 动臂设 计参数 与动臂 液压 缸长 L 共 同作 用 的结果 。
一种液压挖掘机最优能耗的轨迹规划方法

2024年第48卷第3期Journal of Mechanical Transmission一种液压挖掘机最优能耗的轨迹规划方法张韵悦孙志毅孙前来王银杨江涛(太原科技大学电子信息工程学院,山西太原030024)摘要为了降低液压挖掘机的运动能量消耗,实现各关节的合理有效作业,提出了基于T型速度曲线的关节插值方法,以实现液压挖掘机最优能耗轨迹规划。
该方法将各关节的速度设定为匀加速、匀速和匀减速的形式以保证液压挖掘机在作业过程中的平稳性,以关节角度、角速度和角加速度为约束条件,利用改进的自适应遗传算法优化求解各关节的匀加(减)速和匀速运动时间,获得了各关节最优运动曲线,实现了液压挖掘机最优能耗轨迹规划。
对基于T型速度曲线的插值规划方法进行仿真实验,并在相同条件下与四次多项式插值结果进行了对比。
结果表明,该方法规划的轨迹能耗低,避免了各关节产生不必要的运动,有效减少了摩擦损耗,使得挖掘机可平稳、低能耗地完成作业。
关键词液压挖掘机T型速度曲线轨迹规划最优能耗A Trajectory Planning Method for Optimal Energy Consumption of theHydraulic ExcavatorZhang Yunyue Sun Zhiyi Sun Qianlai Wang Yin Yang Jiangtao(School of Electronic Information Engineering, Taiyuan University of Science and Technology, Taiyuan 030024, China)Abstract In order to reduce the movement energy consumption of the hydraulic excavator and realize the reasonable and effective operation of each joint, a joint interpolation method based on a T-type velocity curve is proposed to realize the optimal energy consumption trajectory planning of the hydraulic excavator. In this meth‑od, the speed of each joint is set as uniform acceleration, constant velocity, and uniform deceleration to ensure the stability of the hydraulic excavator in the operation process. Under the constraint conditions of the joint an‑gle, angular velocity, and angular acceleration, the improved adaptive genetic algorithm is used to optimize the uniform acceleration (deceleration) and constant velocity motion time of each joint, obtain the optimal motion curve of each joint, and realize the optimal energy consumption trajectory planning of the hydraulic excavator. The interpolation programming method based on the T-type velocity curve is simulated and compared with the interpolation results of the quartic polynomial under the same conditions. The experimental results show that the trajectory planned by this method has low energy consumption, avoids unnecessary movement of each joint, ef‑fectively reduces friction loss, and makes the excavator complete the operation smoothly and with low energy consumption.Key words Hydraulic excavator T-type velocity curve Trajectory planning Optimal energy con‑sumption0 引言液压挖掘机作为应用广泛的工程机械,在抢险救灾、交通运输以及土木建筑等行业发挥着极其重要的作用。
液压挖掘机行走操作及安全使用注意事项

液压挖掘机行走操作及安全使用注意事项液压挖掘机是一种常见的重型机械设备,具有卓越的作业性能和灵活的作业方式。
使用液压挖掘机在工程项目中的作用非常重要,但同时也存在着一定的安全隐患。
为了保障施工安全,本文将介绍液压挖掘机的行走操作及安全使用注意事项。
液压挖掘机行走操作液压挖掘机在施工现场中的行走操作主要涉及操作杆、行走机构、转向机构等多个部件的协同作用。
以下是液压挖掘机的行走操作流程及要点:步骤一:开动电源操作员接通电源,开动液压挖掘机引擎。
步骤二:检查液压系统操作员应该首先检查液压系统,确保液压油面位于规定范围内,并消除液压系统中的气体。
步骤三:操作杆控制操作员利用液压杆进行操作杆控制,通过操作杆的上下、左右调节来控制液压挖掘机斗杆或铲斗的反向和倾斜方向。
步骤四:行走机构操作操作员通过操纵驾驶台上的行走机构控制手柄,调节液压挖掘机的速度和方向。
其中,行走机构包括液压驱动轮、履带、减速器等组件。
步骤五:转向机构操作在进行转向操作时,操作员通过转向机构控制手柄,使车轮对称左右转动,实现液压挖掘机的转向。
安全使用注意事项在液压挖掘机使用过程中,由于机械设备的特殊性质,为避免可能的施工难点,也需要对其一些具体情况进行特别的安全使用。
以下是液压挖掘机使用过程中的注意事项:注意维护保养为确保液压挖掘机的使用寿命以及正常的施工进度,操作员应该定期维护液压系统、转向系统、电气系统等,及时更换耗损零部件,保证整个使用过程中设备的状态。
操作员必须熟悉并查看机器的警告标志和刻度盘在使用液压挖掘机前,操作员应该熟悉并检查机器上的警告标记和刻度盘等,确保能够正常满足安全使用标准。
小心机器倾斜机器在使用过程中可能会因地形、机械故障等原因倾斜,造成施工安全隐患。
对此,操作员应注意调整并保持良好平衡状态。
保持施工现场整洁施工现场的整洁程度非常重要,杂物、危险品等需要被有序的清除,以避免在施工过程中对设备和施工人员造成带来不必要的影响。
基于CAN总线的挖掘机铲斗轨迹规划与控制(答辩) 共28页PPT资料
个
问
题
运动学分析
铲斗工作装置的D-H坐标系简图
运动学正问题
运动学逆问题
x a3c123 a2c12 a1c1 a0 y 0 z a3s123 a2s12 a1s1 d0
1 2 3
1B EA2 B A2E 2AA BC E O 1 S 2IF C2 IC2 F 2 CC IcF o s 3JK J2L L2K 2 JL LK co JsL
如果设定机械的所有 连杆机构参数,则可 以便捷简单的推出它 的所有坐标系或是执 行机构末端的所有向 量在随便一个坐标系 的姿态与位置。
只要给出了铲斗的 位置与姿态,即关 节角的大小,便可 得知动臂,斗杆和 铲斗油缸此时的长 度
各机构油缸长度与关节交的关系
油缸长度和动 臂关节角的关系
油缸长度和铲斗杆 关节角的关系
易于开发
CAN总线在汽车电 子、工业控制、电
力系统应用广泛
具有极高的 稳定性。
iCAN协议
以ISO/OSI结构的角度来看,CAN总线仅仅定义了第一层 (物理层)和第二层(数据链路层)。
由于 CAN 总线底层协议没有规定应用层,本身并不完整; 在基于 CAN-bus 的分布式控制系统中,有些附加功能(网络 的启动及监控,网络中 CAN 节点的标识和故障识别等)需要 一个高层协议来实现。
控制系统框图
三、铲斗轨迹规划
液压挖掘机在作业中最 多的工作任务是夯实与 平整土壤、沿坡面挖掘 与基坑挖掘等。这些工 作模式均存在特定规律, 能够做到相应的轨迹规 划。依照挖掘工作要求 测算出希望的铲斗运行 轨迹就是轨迹规划,这 是达到工作装置运动操 控的基础。
轨迹规划模式重点是在 D-H法基础上构建其运动 学模型,依照早先规划 的轨迹对铲斗齿尖的位 姿展开运动学逆运算, 推算出铲斗尖位姿与每 一关节变量的联系,给 它的运行轨迹的控制与 规划提供了方法与依据 。
液压挖掘机工作装置运动学分析及轨迹规划
液压挖掘机是一种土石方施工机械,广泛应用于工程建设领域当中,并发挥着重要作用。
为了促进挖掘机朝着智能化方向发展,提升其自动化挖掘能力,应该对液压挖掘机运动轨迹进行科学规划。
国内外众多学者针对插值函数提出各种轨迹规划方法,在液压挖掘机运动学分析领域,包括杆组分析、适量代数和作图法等方法。
1 液压挖掘机工作装置运动学分析1.1 正运动学液压挖掘机相关机械装置具体包括四种自由度,为此需要在思维空间内展现出来,按照所选择的变量描述可划分成以下几个部分。
第一,由三组液压缸长度和回转马达夹角所构成的驱动结构空间;第二,由斗杆和铲斗两者夹角、动臂和斗杆夹角、回转平台和动臂夹角以及底座和回转平台夹角等部分形成关节空间;第三,由基础坐标系中的铲斗夹角状态和铲斗齿尖所形成的位姿空间。
创建液压挖掘机设备装置的运动学坐标系,随后根据相应的机器人坐标学原理能够了解到,空间坐标系中的任意一个向量都可以利用齐次转换矩阵转移至其他坐标系中,把转换矩阵与连杆坐标系进行相乘,能够获得铲斗齿尖坐标系。
根据液压挖掘机各种运行参数,能够计算出基础坐标系中的铲斗齿尖位置,从关节向量空间朝着铲斗位姿空间实施正向转化。
在抛除液压挖掘机实施回转运动条件下,绘制出液压挖掘机装置包络图,从理论上讲,铲斗齿尖理论能够囊括包络图限制范围内各个边界区域。
液压挖掘机相关正向运动即通过机械臂连杆参数对执行器末端位姿进行准确计算,建立D —H 坐标系。
挖掘机的铲斗齿尖是执行器末端,通过对变换矩阵进行研究发现,只有铲斗、斗杆和动臂之间转角关节为未知。
利用图形界面通过D —H 法绘制液压挖掘机运行软件,导出为单独运行软件。
将液压挖掘机装置连杆长度、机械臂动臂长度和简化后的机械臂斗杆长度输入软件当中,点击函数运算,便可以由软件主界面直接转移到函数绘制模块。
把液压挖掘机执行器末端位姿代表公式输入绘制界面中的CALLBACK 函数内,并对其他按钮函数进行科学设置,参考现有挖掘机参数测试软件性能,将现实状况和软件形成的液压挖掘机运行区域进行比较分析可以发现,软件绘制出来的挖掘机工作区域较为准确。
液压挖掘机行走操作及安全使用注意事项
液压挖掘机行走操作及安全使用注意事项液压挖掘机是一种用于土方工程和矿山开采的工程机械。
它具有功率大、工作范围广、适应性强等特点,广泛应用于建筑、交通、水利、地质和煤炭等行业。
在使用液压挖掘机进行行走操作时,需要注意以下几个方面的安全使用事项。
一、液压挖掘机的行走操作流程:1. 开始行走前,先检查机器的移动部件,如履带、链轮、行走装置等,确保无异常故障。
2. 在行走前,务必调整好座椅、操纵杆和脚踏板的位置,保证舒适操作。
3. 在行走中,应遵循“左手刹,右手油门”的原则,即左手控制刹车,右手控制油门。
4. 行驶过程中,应保持稳定速度,避免急转弯和急刹车。
5. 行驶到要停止的地点时,先松开油门,再踩刹车,并确保挖掘臂、反铲等工作部件处于安全位置。
6. 停止行走后,关闭发动机,确保液压挖掘机处于停止状态。
二、液压挖掘机行走的安全使用注意事项:1. 在挖掘机行走前,应检查机器是否有异常情况,如液压油泄漏、紧固螺栓松动等,及时排除故障。
2. 行走时,应将挖掘机的各个部件和工作装置收起,保持车身整洁、稳定,并确保重要零部件完好。
3. 涉水行走时,应先查明水深和地势情况,选择合适的挡位和速度,并注意防止水溅入机器内部。
4. 爬坡行走时,应选择适当的挡位和速度,确保液压系统正常工作,并注意安全距离和操纵稳定。
5. 在行走过程中,应时刻关注周围环境,避开交通要道、人群和其他机械设备,确保安全。
6. 行驶到较窄的通道或工地时,应特别注意避免碰撞,保持稳定行驶。
7. 在行走过程中,如发现有异响、异味或异常振动等情况,应及时停车检查,排除故障。
8. 行走时,严禁在驾驶室内或车身上坐人或站人,确保司机的安全。
三、液压挖掘机行走的操作技巧:1. 提前观察行驶路线,了解地形和障碍物情况,合理安排行驶路径。
2. 在行驶过程中,操控好方向盘,注意调整行驶轨迹,避免碰撞障碍物。
3. 行驶中需注意调整和配合油门和刹车,掌握好速度和动力。
挖掘机使用中的灵活操控技巧
挖掘机使用中的灵活操控技巧挖掘机是一种重型工程机械,广泛应用于土方工程、矿山开采、道路建设等领域。
在挖掘机的使用过程中,掌握一些灵活操控技巧可以提高工作效率,减少操作难度。
本文将从操作手柄的运用、对地形的适应性、合理的操作顺序等方面,介绍挖掘机使用中的灵活操控技巧。
首先,掌握操作手柄的运用是灵活操控挖掘机的基础。
在挖掘机的驾驶室内,有一组手柄用于控制机器的各项动作。
熟练掌握手柄的功能和使用方法,可以更加精准地操作挖掘机。
例如,左手柄控制挖掘机的行走和转向,右手柄则控制挖斗的上下、左右和前后运动。
通过灵活运用手柄,可以使挖掘机在狭小的工作空间内自如穿梭,提高工作效率。
其次,对地形的适应性也是灵活操控挖掘机的重要技巧之一。
不同的工作环境和地形对挖掘机的操作要求各不相同。
在崎岖不平的地形上,需要更加稳定地操作挖掘机,避免侧翻或失控。
而在软弱的土壤中,需要注意避免挖掘机陷入泥潭。
因此,操作者需要根据具体情况,调整挖掘机的工作方式和动作幅度,以适应不同的地形条件。
另外,合理的操作顺序也是灵活操控挖掘机的关键。
在挖掘机的使用过程中,操作者需要根据具体工作要求,合理安排挖掘机的各项动作。
例如,在进行挖掘作业时,可以先将挖斗放在目标位置上方,然后将其缓慢下降,直到接触到工作面。
接着,通过调整挖斗的姿势和角度,进行挖掘作业。
通过合理的操作顺序,可以提高挖掘机的工作效率,减少不必要的动作和能源浪费。
此外,熟练掌握挖掘机的各项功能也是灵活操控的前提。
挖掘机具有多种功能,如挖掘、装载、平整等,操作者需要了解挖掘机的各项功能和使用方法,才能更好地应对不同的工作需求。
例如,挖斗的角度和速度可以根据具体情况进行调整,以提高挖掘效率和减少能耗。
此外,挖掘机还可以配备各种附件,如抓斗、破碎锤等,操作者可以根据需要进行更换,以适应不同的工作要求。
总之,挖掘机使用中的灵活操控技巧对于提高工作效率和降低操作难度非常重要。
通过掌握操作手柄的运用、对地形的适应性、合理的操作顺序以及熟练掌握挖掘机的各项功能,操作者可以更加灵活地操作挖掘机,提高工作效率,实现更好的工程效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SURVEYl NG
液 压 挖 掘 机 铲 斗轨 迹控 制
张 大庆 ,郝
( 中南 大学
鹏 ,何清华 ,施圣 贤
长沙 4 1 0 0 8 3 )
机 电工程学 院 ,湖南
[ 中图分类 - g - - 1 T 1 ) 4 2 2 . 2
[ 文献标 识码 ]B
[ 文章 ̄ - g - - 1 1 0 { ) 1 — 5 5 4 X( 2 0 0 5 ) 0 1 — 0 0 6 1 - 0 3
面情况 ,识别障碍物 等 ,同时该 学院还提 出一 种 用于 实 时轨迹规 划和执行复 杂挖掘运 动 的参 数化 过程 方法。这
种方法建 立在挖掘任 务可 以被描 述为 一系列 简单 的步 骤 或过程的观测 资料 的基础上 ,它是一种通 用 的模 板 ,通 过 它可 以把一系列的挖 掘任务 编码成 知识 。这些过 程 以
阶段 ,因此要想形 成一个 完善 的控制方 法 ,还 有很 多工 作要做。
度 ,而模糊滑 模 控 制和 力/ 1 殂抗控 制均 有较 好 的控 制 精 度 ,其精度在 2 0 c m 以 内。对 于液 压 系统 的非线性 及 系
统 的不确定性 有较 好的鲁棒性。 波兰华沙的施工机械化 和矿业 学院应 用负载 独立液 压 阀控制挖掘过程 ,来避免使 用传感器的 闭环控制 系统 。
学方程 ( 反铲和正铲 ) :国内典型的如 :浙江大学对挖掘
这一 阶段是挖 掘机机 器人化发 展 的最终方 向 ,控 制 结构同样也分为 2级 ,高级控 制 中的控制器 进行在 线规 划 ,而低级控 制器执行高 级控 制器输 出的动作 。即在挖 掘机进行工作前 ,只需输入 挖掘任 务 ,也就是 只要告诉 挖掘机需要 完成什 么任务 ,而 其余如 怎样完成 及具体 的 操作步骤均 由挖掘机 自主 完成 ,整个 过程 无需操作 手的
建冠札拭 2 0 0 5 . 0 1
6 1
专题论述
SURV EYI NG
在此基础上提 出基 于规则 的路 径规 划方法和 按时 间间隔 对关节进行采样 的轨迹规 划方法。
2 . 2 铲斗轨 迹跟踪控制 铲斗轨迹跟踪控 制是建 立在轨迹 规划基础 上 的 ,该
测距仪 ,用来对卡车 进行确认 和准 确定位 ,观 测土壤 表
外典型 的如 :K o i v o l 9 9 4年 在 D—H ( D e n a v i t —h a r t e n —
这 类机 器人化作业挖 掘机 主要是 实现机器 的局部 自 主性 ,如 直线挖 掘、 自动装 载等局部 自主化 功能 。该 类
挖掘机 运用了外部 传感器 ,因此对外 部环境 有一定 的适
跟踪 ,而且在整个挖掘过程 中无需操作手的干涉。 国内在这方面 的研究起 步较 晚,典 型的有 :解 放军 理 工大学 的研究者在其建 立的 4自由度的运动学模型上 , 提 出模糊参数 自整定的 P I D控制算法。
综合国内外液压 挖掘机铲 斗轨迹 控 制可 以看 出 ,虽
然世界各国的研究 水平参 差不齐 ,但 是 多数处 在实验室
B u c k e t t r a j e c t o r y c o n t r o l o f h y d r a u l i c e x c a v a t o r
ZHANG Da — q i n g, HAO P e n g, HE Qi n g — h u a ,S HI S h e n g — x i a n
设 备试 运行显示 ,整个 轨迹跟踪 过程 中挖掘机 工作 装置 运动平稳光 滑 ,基本 不 振 动 ,铲 斗尖 的运 动 速 度 可 达
0 . 1 m/ s 。
原哈尔滨建筑大学提 出了基 于模糊 算法 的示 教再现 控制方法 ,由熟 练工 人引 导 工作 装 置沿 挖掘 轨迹 运 动 , 并 由计 算机记录运动轨迹所对应的工作 装置 的位 置信息 , 在 由计算机控制重复前述 运动轨迹 。
武汉科技 大学设计 了基于 知识 的挖 掘机 多模 式综 合
பைடு நூலகம்
( 2 )基于模型的铲斗轨迹跟踪控制。 这种方法的基本 思路是 :对挖 掘机工作 装置及 其液 压系统建 立简化 的数学模型 ,在 此基础 上推导 出控制算
法 ,以达到对期望轨迹的精确跟踪 。
国外已有多个 挖掘 机器 人化研究 机构进 行这方 面的
轨 迹跟踪控 制系统 。其 出发 点是考虑 到挖掘机 器人 的工 作运动存在很强 的非线性 、不 确定性和 时变性 ,且 工况
工作 ,如澳大利亚机器人技术 中心通过对 P C 0 5—7小松
微型挖掘机进行液压系统 改造 ( 见图 1 ) ,将 驾驶室和所
复杂、外界干扰大、难 以建立 精确 的控 制模型。若 为 了 在精确 的数学模型基础 上提高轨 迹跟踪 性能 ,则 整个控
美 国匹兹堡 ・ 卡内基 ・ 梅隆 大学 的机 器人 学院设计
图 1 改造后 P C O 5 —7挖掘 机 的伺 服 阀组
提出 2 级控 制结构 ,高级 控制进 行工作 规 划 ,而低
级控制执行高级控 制的指令 ,实现对挖掘机 铲斗 的控制 。
了 自动 装载 的挖掘机 器人 。该机 器人使 用 2个 激光扫 描
行控制 ,可见挖掘机铲 斗 的控 制是 实现挖掘机 自动化 的 关键工作之一。
1 液 压挖 掘机 机器 人化 发展 的 3个 阶段
根 据挖掘机 的技术 水平可把 挖掘机 的机器 人化研 究 分为 3 个 阶段 : ( 1 )挖掘机 的简单 自动化。 在此阶段的研究 中,只是利 用反映机 器 自身状态 的 内部传感器信 息 ,而无反映环境状况的外部传感器信息 ;
建芄札拭 2 0 0 5 . 叭
建立挖掘机工作装 置的动 力学模型 ,将挖掘机 连杆 的运 动与关节 力矩和外 力联 系起来 ;并建 立 了液压 伺服 系统 的模型 ,在研 究中给 出多种控 制策略 ,从传统 的 P I D控 制 ,到反馈线性 控 制 ,再 到滑 模控 制 、模 糊 滑 模控 制, 最后给 出力/ 1 抗控 制 ,对于每种控制方法都给 出仿真结 果和试验 结果。最后通 过对试 验结 果分析得 出,传统 的 P I D控 制不能满足 实际挖 掘过程 中的轨迹 跟踪控 制 的精
( 2 )挖掘机的半 自主化 。
3自由度或 4自由度 的机 器手 来处理 。对 铲斗轨 迹 的控 制 ,相 当于通过 控 制机 器手 的末 端来 达到 期望 的轨 迹 , 因此期望轨迹被称为铲 斗轨迹 控制 中的 目标值 。由机 器 人知识可知 ,要控 制铲 斗达 到期望轨迹 ,首先需把 目标 值转换成挖掘机工作 装置各关 节 的空间坐标 ,并满 足一 定 的速度 、加速 度等动 态特性 ,形 成运动轨 迹 ,这 个过 程称为挖掘机铲斗轨 迹规 划。运动学模 型则 主要解决 转 换问题 ,因此挖掘机 的运动学模型是其轨迹规 划的基础。 关于挖掘机的运动模 型 ,国内外已有相 当 多的研究 ,国
分为微机和液压单 元 ( 泵 +负载 独立 阀 )2个 部分 。通
3 液压 挖掘 机 轨迹控 制 的研 究趋 势及 关键 技术
3 . 1 研 究趋势 ( 1 )广泛采 用微 电子技术 、传感 器技术 、实 时控 制
技术 ,以提高控制精度。 ( 2 )采用计算机 2级控 制结 构 ,高级控 制 主要 用于 完成规 划任务 ,而低级控制执行高级控 制下发的指令。 ( 3 )加强 液压 系统及 挖 掘机 执行 机构 的数 学建模 , 传统的线性控制策略 已经不 能满足控 制的需要 ,重 点放 在非线性控 制策略 的研究上。
应能力 ;以离线 的方式进 行轨迹 规划 ,并 把规 划好 的数 据输入控制系统 ,实现 无人操 纵的 自动控 制,这 是一种 计算机 2级控制结构 ,也是 目前最 典型 的挖掘机 器人控
制结构 。 ( 3 )挖掘机的全 自主化 。
b e r g )齐次 变换矩 阵法基 础上建 立 了完整 的挖掘机 运动
阶段 的工作 主要是控 制挖 掘机 的铲斗跟 踪轨迹规 划阶段
所形成的 目标轨迹 点 ,并达 到所需精 度。但是 ,由于 液
压挖掘机 自身的特 点 ,使得 其铲斗轨 迹控 制比一般 工业 机器人的轨迹控制更难 。液 压挖 掘机 的特殊 性在 于其执 行器直接 由液压工作装 置驱动 ,而 工业机器 人一般 由电 动机驱动。液压驱 动执行器 的液压 工作装 置动 力学具有 高度非线性性和低 阻尼性 ;另外 铲斗与 土壤相 互作 用具 有不确定性 ,挖掘 力受 土壤 的黏性 、均 匀性 以及 内部摩
制系统会变得很 复杂 ,从 而增加设 备的初 投资 ,影响 系
统 的可靠性 。该系统具有 “ 砰一砰控 制” 、维持控 制、非
有的操作手柄都取消 ,原 由人工操 纵 的方 向控 制阀被 电 液伺服 阀所代 替 ,增 加 了包 括带卸荷 阀 的蓄能器 、电动
换 向阀和油 一空散热 器等 辅助设备 。并 在机器 上安装 了 编码器 、负载传感 器和控 制器 ,对 自动挖掘进 行理论 和 实践 的研究。
2 ai r n ,因此效 果良好。
擦力的影响 ,进一步 增加 了对挖掘机铲 斗轨迹 进行 精确
跟踪控制的难度。因此常规 的机器 人控制 技术难 以满足 自动挖掘的运动控 制要求。对 于该控 制技术 ,国 内外都 作 了一定的研究。主要有 2 种: ( 1 )基于知识的铲 斗轨迹跟踪控制。
参数 的形式接收外部环 境参 数,并 结合模板 中的变量来 处理 当前 的任务。通 过这 种方法 可 以很容 易地 处理挖 掘 机环境 中的变化 ,而且还 能 以子过 程 的方式添 加挖掘机 的新任 务 ,从而使 其可 以处 理挖掘 机 的异 常工况 ,并 运 用到实际操作 中 ,结果表 明 ,在相 同的情况 下使 用该 系 统装满一 卡 车 需 要 1 5 ~1 6 s ,而 熟 练 的 操 作 手 也 需 要