带增程器电动汽车动力总成系统CAN总线通讯协议制定与测试
基于CAN总线分析的增程式电动汽车控制策略研究
基于CAN总线分析的增程式电动汽车控制策略研究随着全球环保意识的日益提高,电动汽车逐渐被广泛应用。
但是,其市场占有率和运行效能却受到电池电量有限和充电时间长等因素的限制。
为了解决这些问题,增程式电动汽车作为一种新型的电动汽车类型,应运而生。
本文将基于CAN总线分析的角度,探讨增程式电动汽车的控制策略研究。
CAN总线作为一种常用的通信协议,已经被广泛应用于汽车电子领域。
增程式电动汽车的控制策略需要依赖CAN总线进行数据交换,以实现各个系统间的协同工作。
在CAN总线上,需要建立多个节点,包括电机控制节点、电池管理系统节点、发动机控制节点等。
节点之间通过CAN总线进行数据传输,在数据传输过程中需要满足以下要求:1. 速度要求快:由于数据传输需要实时性,因此必须确保CAN总线传输速度快,传输效率高。
2. 数据量大:由于涉及到多个节点之间的数据传输,数据量非常大。
3. 稳定性高:由于CAN总线采用差分信号传输,具有抗干扰能力强等特点,因此需要确保传输过程的稳定性。
在增程式电动汽车控制策略研究中,需要对电池管理系统与电机控制系统之间的数据交换进行优化。
电池管理系统需要实时监测电池的电量,并将电量信息传输给电机控制系统,以实现对电机的控制。
电机控制系统需要及时获取电池电量数据,以根据不同的能量需求控制电机的输出功率。
同时,在增程式电动汽车控制策略研究中,需要将发动机控制节点纳入控制系统中。
发动机控制节点需要实时监测增程用燃料的量,并将燃料信息传输给车辆控制单元。
车辆控制单元通过对电机和发动机输出功率的控制,实现车辆的动力平衡和性能优化。
综上所述,基于CAN总线分析的增程式电动汽车控制策略研究,需要通过优化电池管理系统与电机控制系统之间的数据交换,实现对电机输出功率的控制;并将发动机控制节点纳入控制系统中,实现车辆动力平衡和性能优化。
同时,还需要确保CAN总线传输速度快、传输效率高、稳定性强,以保证数据传输的实时性和准确性。
整车CAN总线测试
整车CAN总线测试CAN总线是一种高速数据通信系统,可帮助车辆各个部件间的通信,从而实现灵活、高效的汽车控制系统。
在汽车行业,CAN总线测试起着至关重要的作用,可以确保整车CAN总线顺畅可靠,从而最大化车辆的性能和安全性。
整车CAN总线测试是一项繁琐复杂的工作,要求测试人员充分了解测试原理、测试步骤和测试工具等方面的知识。
下面简要介绍整车CAN总线测试的基本流程和关键步骤。
1. 确定测试对象和测试环境整车CAN总线测试要求测试人员事先确定测试的对象和测试环境,例如:车辆型号、车辆系统等,同时还要确认测试所需的测试设备和测试场地等。
2. 制定测试计划和测试方案测试人员要制定详细的测试计划和测试方案,包括测试的目标、范围、方法、步骤、标准和异常情况处理等,以确保整车CAN总线测试能够顺利进行。
3. 准备测试工具和测试数据整车CAN总线测试需要用到各种测试工具和测试数据,如示波器、协议分析仪、CAN总线信号发生器、脚本编制工具等。
测试工具的准备需要根据测试计划和测试方案确定。
4. 进行测试操作和数据分析测试人员通过测试工具和测试数据,对整车CAN总线进行测试和分析。
测试过程中需要关注数据传输的可靠性、带宽和响应时间等指标,同时还要检测可能存在的故障和异常情况。
5. 形成测试报告和提出优化建议根据整车CAN总线测试结果,测试人员需要对测试数据进行分析和处理,形成详细的测试报告。
测试报告应包括测试结果、测试数据、测试思路、测试结论和测试建议等内容,同时还应提出优化建议和改进方案。
在整车CAN总线测试过程中,还应当注意一些关键点。
首先,需要充分了解各种标准协议和接口,例如:ISO11898、CANopen、J1939、LIN等。
其次,测试人员需要熟练掌握各种测试工具和软件,例如:Vector、NI、CANalyzer等。
综上所述,整车CAN总线测试是一项高要求的工作,需要测试人员有深厚的技术水平和细心的操作态度,才能够对车辆CAN总线进行有效的检测和优化,确保汽车行驶的质量和安全性。
增程式电动车网络通信协议

名称增程式电动车网络通信协议编号版本目次目次 (II)1整车网络布局 (1)2整车网络通讯硬件要求 (1)3整车网络通讯协议 (2)CAN总线网络报文布局说明 (2)3.1.1 CAN总线网络报文布局图 (2)3.1.2 CAN网络地址分配表 (3)数据格式定义 (3)整车动力系统控制网络CANA (4)3.2.1 DKQ107A电机控制器与整车控制器通讯报文 (4)3.2.2 DKQ101电机控制器与整车控制器通讯报文 (7)整车控制器与发电机控制器通信报文 (9)整车信息网络CANB (12)整车控制器发送报文 (12)策动机发送报文 (15)整车监控网络CANC (15)电池办理发送整车控制报文 (15)电池办理发送 (18)电池办理系统发送电池单体电压 (18)电池办理系统发送电池包温度 (20)电池办理系统发送充电设备报文 (21)超等电容办理系统发送报文 (24)绝缘检测装置发送报文 (25)纯电动车网络通信协议1 整车网络布局整车网络由以下子网构成,如以下图:整车动力系统控制网络CANA,包罗整车控制器、电机控制器、发电机控制器,实现控制数据交换。
整车信息网络CANB,整车控制器、策动机ECU、仪表实现信息数据交换。
整车监控网络CANC,整车控制器、电池办理系统、超等电容办理系统、仪表、绝缘检测仪、充电机实现数据交换。
2 整车网络通讯硬件要求网络系统的3个子网CANA、 CANB、CANC是物理上完全隔离的,其彼此间的数据交换必需通过整车控制总成网关才能实现;CAN总线通信电缆采用屏蔽双绞线〔阻燃〕;所有CAN总线包管终端电阻数量不超过3个〔不小于40 〕,终端电阻采用支架安装,以便调整,同时,终端电阻同网络线之间通过跳线相连,以便灵活搭配;CAN网络线CAN-H和CAN-L在各部件的插座里各有一个插针,但是必需在插头处别离接一进一出两组线;CAN总线所有结点均有光耦隔离,总线驱动均为PHILIPS的82C250芯片;所有通信电缆应尽量离开动力线〔以上〕、离开24V控制线〔以上〕;电缆屏蔽层在车内持续导通,建议每个部件的网络插座有屏蔽层的接头,在部件内部,屏蔽层通过串接1个电阻和1个电容与部件控制机箱地可靠相连。
CAN总线通信系统在混合动力汽车的设计和测试
56 AUTO TIMEAUTOMOTIVE TECHNOLOGY | 汽车技术CAN 总线通信系统在混合动力汽车的设计和测试胡佳玺长城汽车股份有限公司技术中心 河北省保定市 071000摘 要: 混合动力汽车存在弱电设备的电子干扰强、在信号传递时对实时性要求比较高以及信息量比较大的特性,为了更好的解决这方面的问题,提高混合动力汽车的性能,人们设计了CAN 总线通信协议。
该协议符合SAEJ1939标准,主要内容有物理层协议、网络管理协议、交互层协议、应用层协议与故障诊断处理的方案等,在该协议中人们提出了具体的网络通信的性能指标。
通过大量的实验也证明了该协议是能够满足混合动力汽车在复杂的电磁环境下的各项需求,并且具有优良的通信性能与对故障的自我诊断能力。
关键词:混合动力汽车;CAN 协议;电磁干扰1 总成控制系统的设计1.1 控制系统网络设计。
跟大部分的汽车一样,混合动力汽车的控制系统不是单独的存在,它是由诸多控制单元组合而成的车载系统,属于分布式,结构上属于拓扑结构,使用适合的终端电阻作为总线的终端,这样做可以起到对信号反射的阻止作用。
而CAN 总线的两端分布着终端电阻,两端的端口也是单独的终端电阻。
1.2 网络管理协议设计。
网络管理对于CAN 网络的正常工作起着至关重要的作用,通过OSEK 与VDX 模型可以看出,网络管理主要包括直接网络管理与间接网络管理两种模式。
拥有专业的网络管理报文的是直接网络管理,而通过被检测各个节点的周期性发送应用报文以对整个网络节点进行确定的是间接网络管理。
如果在规定的时间之内,网络管理收不到节点发送的报文,便可以确认在这个网络上并没有这个节点。
总体来说,间接网络管理可以减少对于总线的负荷。
1.3 CAN总线应用层协议的设计。
相对传统的汽车,混合动力汽车新增了一些设备以及部件,比如驱动电机,动力电池与动力控制单元。
在SAEJ1939协议中已经对这些部件进行了定义,本文在这里对这些部件的ECU 源地址给出定义,综合信息帧的优先级与数据页包括ECU 的源地址,从而得到所有信息条目的ID 。
汽车ecu bms通信协议标准
标题:汽车ECU BMS通信协议标准一、概述随着汽车电子系统的不断发展和智能化水平的提高,汽车的ECU(汽车电子控制单元)和BMS(电池管理系统)之间的通信协议变得越来越重要。
通信协议标准的统一对于汽车电子系统的互操作性和稳定性至关重要。
本文将重点探讨汽车ECU和BMS之间的通信协议标准。
二、汽车ECU和BMS的通信协议标准1. CAN总线通信协议CAN(Controller Area Network)总线是一种广泛应用于汽车电子系统中的通信协议。
它具有高速传输、抗干扰能力强等优点,在汽车ECU和BMS之间的通信中得到了广泛应用。
2. LIN总线通信协议LIN(Local Interconnect Network)总线是一种针对汽车电子系统中从属设备之间通信的低成本、低速率的总线标准。
在汽车BMS和部分低带宽要求的ECU之间的通信中,LIN总线也得到了应用。
3. FlexRay通信协议FlexRay是一种高速、冗余的汽车网络协议,它被设计用于替代现有的汽车通信标准,提供更高的数据传输速率和实时性能。
在某些高性能汽车和BMS之间的通信中,FlexRay也得到了应用。
三、通信协议标准的选择和应用1. 根据汽车电子系统的要求,选择合适的通信协议标准,考虑到数据传输速率、实时性能、抗干扰能力等因素。
2. 对于不同的汽车电子系统,选择不同的通信协议标准,以确保各个子系统之间的通信稳定和可靠。
3. 根据通信协议标准的应用场景和技术要求,对汽车ECU和BMS之间的通信协议进行定制化设计和开发,以满足具体需求。
四、未来发展趋势1. 随着汽车电子系统的不断发展和智能化水平的提高,汽车的ECU和BMS之间的通信协议标准将会不断进化和完善。
2. 在未来,通信协议标准的选择和应用将更加智能化和个性化,以满足汽车电子系统对数据传输速率、实时性能和稳定性的不断提升的需求。
3. 通信协议标准的开放性和统一性将会更加重要,以促进不同厂商的汽车电子系统之间的互操作和兼容性。
纯电动车BMS与整车系统CAN通信协议详情
纯电动车BMS与整车系统CAN通信协议详情随着环保意识的增强和电动车市场的迅速发展,纯电动车(Battery Electric Vehicle,BEV)作为零排放、零尾气的新能源汽车正逐渐受到人们的关注和青睐。
在纯电动车的电池管理系统(Battery Management System,BMS)中,与整车系统之间的通信协议变得尤为重要。
本文将详细介绍纯电动车BMS与整车系统CAN通信协议的相关内容。
一、纯电动车BMS与整车系统的关系纯电动车的BMS作为一套独立的系统,主要用于监测和管理电池组的状态、实时数据采集、故障诊断以及能量管理等功能。
而整车系统则负责电动车的整体控制,包括电机控制、车速控制、动力分配等。
BMS与整车系统之间的通信,可以实现BMS对整车系统的控制和监控,保证电池组和整车系统的协调运行,提高电动车的安全性和性能。
二、CAN通信协议的基本原理控制器局域网络(Controller Area Network,CAN)是一种广泛应用于汽车、工业自动化等领域的通信协议。
CAN总线采用串行通信方式,具有高可靠性、抗干扰能力强的特点,在电动车领域得到了广泛应用。
CAN协议定义了通信的物理层、数据链路层和应用层,保证了数据的可靠传输和节点间的高效通信。
三、CAN通信协议在纯电动车BMS与整车系统中的应用1. 数据交互:CAN通信协议在BMS和整车系统之间实现了数据的双向交互。
BMS可以向整车系统提供电池组的相关信息,如电池电压、电流、温度等。
同时,整车系统也可以向BMS发送指令,如充电指令、功率调节指令等。
2. 故障诊断:CAN通信协议可以实现对电池组和整车系统的故障诊断。
当BMS检测到电池组或整车系统存在异常情况时,会通过CAN总线将故障码发送给整车系统,从而实现故障的定位和诊断。
3. 控制策略:CAN通信协议可以实现BMS对整车系统的控制。
例如,BMS可以根据电池组的状态和整车系统的需求,发送合适的控制策略给整车系统,如调节电机的输出功率、控制充放电速度等。
纯电动车BMS和整车系统CAN通信协议书模板
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling).SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair).SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
增程式电动车CANB网络通讯协议(2013.1.10)
一、CAN总线网络报文结构图2
二整车控制器与仪表通讯报文(CANB)3
1、整车控制器发送仪表报文3
2、仪表发送整车控制器报文6
三、电容管理系统发送报文(CANB)7
四、绝缘检测系统发送报文(CANB)8
五、DC/AC发动报文(CANB)9
六、DC/DC发动报文(CANB)9
七、空调控制器相关报文(CANB)10
周期MS
绝缘检测仪
仪表
PGN-
500
P
R
DP
PF
PS
SA
波特率
6
0
0
25
161
164
数据
250Kbps
位置
数据名
备注
BYTE1
正端对地绝缘电阻
高字节
1KΩ/ bit
BYTE2
低字节
BYTE3
负端对地绝缘电阻
高字节
1KΩ/ bit
BYTE4
低字节
BYTE5
故障等级
0:无故障、
1:一级故障、
2:二级故障
BYTE5
直流侧电流低字节
0.1A/bit,-10000
BYTE6
直流侧电流高字节
BYTE7
空调工作状态
见下表
BYTE8
LIFE值
空调工作状态(1表示有效,0表示无效)
BIT7
BIT6
BIT5
BIT4
BIT3
BIT2
BIT1
BIT0
Ready
故障
备用
备用
备用
备用
备用
空压机启动
注:
1.BIT0为1时,表示空压机启动;BIT0为0时,表示空压机停止工作;
电动汽车充电机通信协议
目录宁波拜特发送给通讯板CAN1 ......................................................................第一帧0001:宁波拜特发送给充电机 ..............................................................第二帧0002:宁波拜特发送给充电机 ..............................................................第三帧0003:宁波拜特发送给充电机 ..............................................................第四帧0004:宁波拜特发送给充电机 ..............................................................第五帧0005:宁波拜特发送给充电机 ..............................................................第六帧0006:宁波拜特发送给充电机 ..............................................................通讯板CAN1 发送给宁波拜特 ....................................................................第一帧401充电机发送给宁波拜特 ...............................................................第二帧402:充电机发送给宁波拜特 ...............................................................第三帧403:充电机发送给宁波拜特 ...............................................................第四帧404:充电机发送给宁波拜特 ...............................................................第五帧405:充电机发送给宁波拜特 ...............................................................主控板发送给通讯板CAN2 ........................................................................第一帧18A0ABCC:APF侧主控板发送给通讯板 ....................................................第二帧:BiDCDC侧主控板发送给通讯板 ..........................................................第三帧C0:APF侧主控板发送给通讯板 ...........................................................第四帧:APF侧主控板发送给通讯板 ............................................................第五帧:BiDCDC侧主控板发送给通讯板 ..........................................................通讯板发送给主控板CAN2 ........................................................................第一帧C0: 通讯板发送给主控板CAN2 ...........................................................11第二帧C1: 通讯板发送给主控板CAN2 ...........................................................第三帧C2:通讯板发送给主控板CAN2.............................................................1111第四帧404:通讯板发送给主控板CAN2 ..........................................................BiDCDC侧发送给APF侧 ........................................................................第一帧C0: BiDCDC发送给APF侧 CAN2 ......................................................第二帧:BiDCDC侧主控板发送给APF侧 CAN2 ..................................................APF侧发送给BiDCDC侧 .........................................................................第一帧C0: APF发送给BiDCDC侧 CAN2........................................................第二帧: APF发送给BiDCDC侧 CAN2 .........................................................3.1、充电桩CAN1发往充电机A通迅板CAN1:共2帧 ..............................................3.1.1第一帧D1:充电桩对充电机的控制命令 .....................................................3.1.2第二帧D2:充电统计信息数据 .............................................................3.2、充电机A通迅板CAN1发往充电桩协议:共4帧 ................................................3.2.1第一帧C1:充电机运行信息 ...............................................................3.2.2第二帧C2:充电机交流输入信息 ...........................................................3.2.3第三帧C3:充电机APF侧运行信息码与温度 .................................................3.2.4第三帧C4:充电机BiDCDC侧运行信息码与温度 ...........................................3.3、充电机B通迅板CAN3发往上位机协议:共9帧 ..................................................3.3.1第一帧D1:充电机工作信息 ................................................................3.3.2第二帧D2:充电信息统计数据 .............................................................3.3.3第三帧C1:充电机状态信息 ...............................................................3.3.4第四帧C2:充电机交流输入信息 ...........................................................3.3.5第五帧C3:充电机APF侧工作信息码与温度 .................................................3.3.6第六帧C4:充电机BiDCDC侧工作信息码与温度 ...........................................3.3.7第七帧E1:电动汽车电池组单体电压信息1 ................................................3.3.8第八帧E2:电动汽车电池组单体电压信息2 ................................................3.3.9第九帧E3:电动汽车电池组信息 ..........................................................3.4、CAN以太网转换器发往充电机B通迅板CAN3协议: ...........................................3.4.1第一帧C1:监控系统对充电机的控制命令 ..................................................C1:通过CANB板的CAN1发送监控系统对充电机的控制命令 ......................................宁波拜特发送给通讯板CAN1第一帧0001:宁波拜特发送给充电机ID 0x001 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 保护电压上限低字节 HighestVoltage_Prt BYTE2 保护电压上限高字节 0.025VBYTE3 保护电压下限低字节 LowestVoltage_PrtBYTE4 保护电压下限高字节 0.025VBYTE5 保护电流上限低字节 Charge_MaxCurrent_Prt BYTE6 保护电流上限高字节 0.015ABYTE7 保护电流下限低字节 Discharge_MaxCurrent_Prt BYTE8 保护电流下限高字节 0.015A第二帧0002:宁波拜特发送给充电机ID 0x002 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 充电运行电压限制低字节 LimitVoltage_Charging BYTE2 充电运行电压限制高字节 0.025VBYTE3 充电运行电流限制低字节 LimitCurrent_Charging BYTE4 充电运行电流限制高字节 0.015ABYTE5 充电运行单体电压上限低字节 LimitCellVoltage_Charging BYTE6 充电运行单体电压上限高字节 0.025VBYTE7BYTE8第三帧0003:宁波拜特发送给充电机ID 0x003 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 放电运行电压限制低字节 LimitVoltage_Charging BYTE2 放电运行电压限制高字节 0.025VBYTE3 放电运行电流限制低字节 LimitCurrent_Charging BYTE4 放电运行电流限制高字节 0.015A第四帧0004:宁波拜特发送给充电机ID 0x004 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 主参数低字节 MainParameterBYTE2 主参数高字节 0.025VBYTE3 工作模式 工作模式WorkModeSet_NBT01 恒流充电 02恒压充电03 恒流放电 04 恒功率充电05恒功率放电 06恒阻放电07搁置工作状态WorkStateSet_NBT单体控制 CellCtrl_NBT 第五帧0005:宁波拜特发送给充电机ID 0x005 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明BYTE1 当前最高单体电压低字节 CellBatteryHighestVoltage BYTE2 当前最高单体电压高字节 0.025V第六帧0006:宁波拜特发送给充电机ID 0x006 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 当前电流电压发送周期低字节 CurrentVolSendCycleBYTE2 当前电流电压发送周期高字节通讯板CAN1 发送给宁波拜特第一帧401充电机发送给宁波拜特ID 0x401 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 保护电压上限低字节 HighestVoltage_Prt BYTE2 保护电压上限高字节 0.025VBYTE3 保护电压下限低字节 LowestVoltage_PrtBYTE4 保护电压下限高字节 0.025VBYTE5 保护电流上限低字节 Charge_MaxCurrent_Prt BYTE6 保护电流上限高字节 0.015ABYTE7 保护电流下限低字节 Discharge_MaxCurrent_Prt BYTE8 保护电流下限高字节 0.015A第二帧402:充电机发送给宁波拜特ID 0x402 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 充电运行电压限制低字节 LimitVoltage_Charging BYTE2 充电运行电压限制高字节 0.025VBYTE3 充电运行电流限制低字节 LimitCurrent_Charging BYTE4 充电运行电流限制高字节 0.015ABYTE5 充电运行单体电压上限低字节 LimitCellVoltage_Charging BYTE6 充电运行单体电压上限高字节 0.025VBYTE7BYTE8第三帧403:充电机发送给宁波拜特ID 0x403 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 放电运行电压限制低字节 LimitVoltage_Charging BYTE2 放电运行电压限制高字节 0.025VBYTE3 放电运行电流限制低字节 LimitCurrent_Charging BYTE4 放电运行电流限制高字节 0.015ABYTE5BYTE6第四帧404:充电机发送给宁波拜特ID 0x404 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 主参数低字节 MainParameterBYTE2 主参数高字节 0.025VBYTE3 工作模式 工作模式WorkModeSet_NBT01 恒流充电 02恒压充电03 恒流放电 04 恒功率充电05恒功率放电 06恒阻放电07搁置工作状态WorkStateSet_NBT单体控制 CellCtrl_NBT 第五帧405:充电机发送给宁波拜特ID 0x405 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 运行电压低字节 Voltage_BiDCDCBYTE2 运行电压高字节 0.025VBYTE3 运行电流低字节 Current_BiDCDCBYTE4 运行电流高字节 0.015A主控板发送给通讯板CAN2第一帧18A0ABCC:APF 侧主控板发送给通讯板ID 0x18A0ABCC 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)C1 AB CC数 据 域位置 数 据 名 数 据 说 明 BYTE1 工作模式/工作状态 WorkMode_Set WorkMode_APFWorkState_R WorkState_APFdeadband_comBYTE2 WorkMode_Set 0.1.2.3.CtrlMode 4.5Test_Mode 6,7BYTE3 APF侧母线电压低字节 dis_udc APF_udcBYTE4 APF侧母线电压高字节BYTE5 交流输入电流低字节 dis_iaf APF_iafBYTE6 交流输入电流高字节BYTE7 flag_protect_softBYTE8第二帧:BiDCDC 侧主控板发送给通讯板ID 0x18A0CCBB 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)C1 AB CC数 据 域位置 数 据 名 数 据 说 明BYTE1 工作模式/工作状态 WorkMode_Set WorkMode_BiDCDCWorkState_R WorkState_BiDCDCdeadband_comBYTE2 工作状态/工作模式 WorkMode_Set 0.1.2.3.CtrlMode 4.5Test_Mode 6,7BYTE3 充电机输出的充电电压低字节 dis_udc Voltage_BiDCDCBYTE4 充电机输出的充电电压高字节BYTE5 充电机输出的充电电流低字节 disp_IOUTdc Current_BiDCDCBYTE6 充电机输出的充电电流高字节BYTE7 APF侧母线电压低字节 APF_BusVoltageBYTE8 APF侧母线电压高字节第三帧C0:APF侧主控板发送给通讯板ID 0x18A1CCAA 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)C1 AB CC数 据 域位置 数 据 名 数 据 说 明 BYTE1 线电压低字节 APF_u_abBYTE2 线电压高字节BYTE3 A相电流低字节 APF_iafBYTE4 A相电流高字节BYTE5 B相电流低字节 APF_ibfBYTE6 B相电流高字节BYTE7 C相电流低字节 APF_icfBYTE8 C相电流高字节第四帧:APF 侧主控板发送给通讯板ID 0x18F1CCAA 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 APF运行信息代码1 APF_ERROR[0]BYTE2 APF运行信息代码2 APF_ERROR[1]BYTE3 APF运行信息代码3 APF_ERROR[2]BYTE4 APF运行信息代码4 APF_ERROR[3]BYTE5 APF散热器温度1 APF_Temp[0]BYTE6 APF散热器温度2 APF_Temp[0]BYTE7 APF散热器温度3 APF_Temp[0]BYTE8 APF散热器温度4 APF_Temp[0]第五帧:BiDCDC 侧主控板发送给通讯板ID 0x18F1CCAA 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 BiDCDC运行信息代码1 BiDCDC_ERROR[0]BYTE2 BiDCDC运行信息代码2 BiDCDC_ERROR[1]BYTE3 BiDCDC运行信息代码3 BiDCDC_ERROR[2]BYTE4 BiDCDC运行信息代码4 BiDCDC_ERROR[3]BYTE5 BiDCDC散热器温度1 BiDCDC_Temp[0]BYTE6 BiDCDC散热器温度2 BiDCDC_Temp[0]BYTE7 BiDCDC散热器温度3 BiDCDC_Temp[0]BYTE8 BiDCDC散热器温度4 BiDCDC_Temp[0]通讯板发送给主控板CAN2第一帧C0: 通讯板发送给主控板CAN2ID 0x18C0ABCC周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)C1 AB CC数 据 域位置 数 据 名 数 据 说 明BYTE1 工作模式/工作状态 WorkMode_SetbyCAN 低四位0B0000 静置 0B0001 恒流充电0B0010 恒压充电(限压恒流充电)0B0011 恒功率充电0B0100 恒流放电0B0101 恒压放电(限压恒流放电)0B0110 恒功率放电0B0111 系统调试模式WorkState_Set 4,5位0B00 停止 0B01 运行0B10 暂停 0B11 出错deadband_comHMI_TestMode = 0:为正常工作模式; 1:为系统调试模式BYTE2 充电电压设置低字节 VoltageSet_ChargeBYTE3 充电电压设置高字节 0.1VBYTE4 充电电流设置低字节 CurrentSet_ChargeBYTE5 充电电流设置高字节 0.1ABYTE6 AC侧电流设置低字节 IacSet_HMIBYTE7 AC侧电流设置高字节 0.1ABYTE8 控制模式/调试模式 KM1FANKA3KA4_CtrlHMI_CtrlMode第二帧C1: 通讯板发送给主控板CAN2ID 0x18C1ABCC 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)C1 AB CC数 据 域位置 数 据 名 数 据 说 明 BYTE1 主参数低字节 MainParameterBYTE2 主参数高字节BYTE3 单体最高电压低字节 CellBatteryHighestVoltage BYTE4 单体最高电压高字节BYTE5 单体电压限值低字节 LimitCellVoltage_Charging BYTE6 单体电压限值高字节BYTE7 控制信息 KM2_ENABLE 1吸合 2 断开CellCtrl_NBT 单体控制 BYTE8 故障信息 CCS_ErrorCode第三帧C2:通讯板发送给主控板CAN2ID 0x18C2ABCC 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 保护电压上限低字节 HighestVoltage_Prt BYTE2 保护电压上限高字节 0.1VBYTE3 保护电压下限低字节 LowestVoltage_PrtBYTE4 保护电压下限高字节 0.1VBYTE5 保护电流上限低字节 Charge_MaxCurrent_Prt BYTE6 保护电流上限高字节 0.1ABYTE7 保护电流下限低字节 Discharge_MaxCurrent_Prt BYTE8 保护电流下限高字节 0.1A第四帧404:通讯板发送给主控板CAN2ID 0x404 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 主参数低字节 MainParameterBYTE2 主参数高字节 0.025VBYTE3 工作模式 工作模式WorkModeSet_NBT01 恒流充电 02恒压充电03 恒流放电 04 恒功率充电05恒功率放电 06恒阻放电07搁置工作状态WorkStateSet_NBT单体控制 CellCtrl_NBT第五帧F1:通讯板发送给主控板CAN2【新增参数设置】 ID 0x18F1ABCC 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 直流电压矫正BYTE2 直流电流矫正BYTE3 直流电压偏移低字节BYTE4 直流电压偏移高字节BYTE5 直流电流偏移低字节BYTE6 直流电流偏移高字节BYTE7BYTE8第六帧F2:通讯板发送给主控板CAN2【新增参数设置】 ID 0x18F2ABCC 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 直流电压比例1低字节BYTE2 直流电压比例1高字节BYTE3 直流电压比例2低字节BYTE4 直流电压比例2高字节BYTE5 直流电压比例3低字节BYTE6 直流电压比例3高字节BYTE7 直流电压比例4低字节BYTE8 直流电压比例4高字节第七帧F3:通讯板发送给主控板CAN2【新增参数设置】 ID 0x18F3ABCC 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 充电电流比例1低字节BYTE2 充电电流比例1高字节BYTE3 充电电流比例2低字节BYTE4 充电电流比例2高字节BYTE5 放电电流比例1低字节BYTE6 放电电流比例1高字节BYTE7 放电电流比例2低字节BYTE8 放电电流比例2高字节BiDCDC侧发送给APF侧第一帧C0: BiDCDC发送给APF侧 CAN2ID 0x18A0CCBB:周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明BYTE1 工作模式/工作状态 BiDCDC_WorkMode 低四位0B0000 静置 0B0001 恒流充电0B0010 恒压充电(限压恒流充电)0B0011 恒功率充电0B0100 恒流放电0B0101 恒压放电(限压恒流放电)0B0110 恒功率放电0B0111 系统调试模式BiDCDC_WorkState 4,5位0B00 停止 0B01 运行0B10 暂停 0B11 出错BYTE2 充电电压设置低字节 Voltage_BiDCDCBYTE3 充电电压设置高字节 0.1VBYTE4 充电电流设置低字节 Current_BiDCDCBYTE5 充电电流设置高字节 0.1A第二帧:BiDCDC侧主控板发送给APF 侧 CAN2ID 0x18F1CCBB 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 BiDCDC运行信息代码1 BiDCDC_ERROR[0]BYTE2 BiDCDC运行信息代码2 BiDCDC_ERROR[1]BYTE3 BiDCDC运行信息代码3 BiDCDC_ERROR[2]BYTE4 BiDCDC运行信息代码4 BiDCDC_ERROR[3]BYTE5 BiDCDC散热器温度1 BiDCDC_Temp[0]BYTE6 BiDCDC散热器温度2 BiDCDC_Temp[0]BYTE7 BiDCDC散热器温度3 BiDCDC_Temp[0]BYTE8 BiDCDC散热器温度4 BiDCDC_Temp[0]APF侧发送给BiDCDC侧第一帧C0: APF发送给BiDCDC 侧 CAN2ID 0x18A0CCBB:周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明BYTE1 工作模式/工作状态 APF_WorkMode 低四位0B0000 静置 0B0001 恒流充电0B0010 恒压充电(限压恒流充电)0B0011 恒功率充电0B0100 恒流放电0B0101 恒压放电(限压恒流放电)0B0110 恒功率放电0B0111 系统调试模式APF_WorkState 4,5位0B00 停止 0B01 运行0B10 暂停 0B11 出错BYTE2 APF侧母线电压低字节 APF_BusVoltageBYTE3 APF 侧母线电压高字节 0.1V第二帧: APF发送给BiDCDC侧 CAN2ID 0x18F1CCAA 周期(ms)PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)数 据 域位置 数 据 名 数 据 说 明 BYTE1 APF运行信息代码1 APF_ERROR[0]BYTE2 APF运行信息代码2 APF_ERROR[1]BYTE3 APF运行信息代码3 APF_ERROR[2]BYTE4 APF运行信息代码4 APF_ERROR[3]BYTE5 APF散热器温度1 APF_Temp[0]BYTE6 APF散热器温度2 APF_Temp[0]BYTE7 APF散热器温度3 APF_Temp[0]BYTE8 APF散热器温度4 APF_Temp[0]3.1、充电桩CAN1发往充电机A通迅板CAN1:共2帧3.1.1第一帧D1:充电桩对充电机的控制命令ID 0x0FD1CCDD 周期(ms)20PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)011 11 D1 CC DD数 据 域位置 数 据 名 数 据 说 明BYTE1 充电模式 0x00 :高频整流0x01 :恒流限压充电,0x02 :恒压限流充电,0x03 :恒功率充电,0x04 :容性无功输出0x05 :感性无功输出0x06 :恒流限压放电,0x07 :恒阻放电0x08 :恒功率放电,BYTE2 工作命令 0x00 : 停机 0x01 :运行0x02 :恢复 0x03 :故障BYTE3 控制方式 0x00 :手动 0x01: 国网BMS模式0x02: 充电桩控制0x03: 监控系统控制0x04: 国标BMS模式BYTE4 工作模式 0x00 :正常工作模式0x01 :系统调试模式BYTE5 充电电压设定低字节 0.1V/bit 偏移量:0例:V =3201,对应电压为320.1v BYTE6 充电电压设定高字节BYTE7 充电电流设定低字节 0.1A/bit 偏移量:0例:I =582 ,对应电流为58.2A BYTE8 充电电流设定高字节3.1.2第二帧D2:充电统计信息数据ID 0x0FD2CCDD 周期(ms)1000 PRI Resv FunctionCode DestAddr(8bit) SourceAddr(3bit) (2bit) (8bit) (8bit) (8bit) 011 11 D2 CC DD数 据 域位置 数 据 名 数 据 说 明BYTE1 充电起始时间_低字节 充电起始时间为:时分秒BYTE2 充电起始时间_高字节BYTE3 充电时长低字节 单位:分钟,偏移量:0例:V =65535,对应费用为65535分钟 BYTE4 充电时长高字节BYTE5 充电电量低字节 单位:0.01度,偏移量:0例:V =65535,对应费用为655.35度 BYTE6 充电电量高字节BYTE7 充电费用低字节 单位:0.01元,偏移量:0例:V =65535,对应费用为655.35元 BYTE8 充电费用高字节3.2、充电机A通迅板CAN1发往充电桩协议:共4帧3.2.1第一帧C1:充电机运行信息ID 0x07C1DDCC 周期(ms) 20PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)001 11 C1 DD CC数 据 域位置 数 据 名 数 据 说 明BYTE1 充电模式 0x00 :高频整流0x01 :恒流限压充电,0x02 :恒压限流充电,0x03 :恒功率充电,0x04 :容性无功输出0x05 :感性无功输出0x06 :恒流限压放电,0x07 :恒阻放电0x08 :恒功率放电,BYTE2 工作命令 0x00 : 停机 0x01 :运行0x02 :恢复 0x03 :故障BYTE3 控制方式 0x00 :手动 0x01: 国网BMS模式0x02: 充电桩控制0x03: 监控系统控制0x04: 国标BMS模式BYTE4 工作模式 0x00 :正常工作模式0x01 :系统调试模式BYTE5 充电电压低字节 0.1V/bit 偏移量:0例:V =3201,对应电压为320.1v BYTE6 充电电压高字节BYTE7 充电电流低字节 0.1A/bit 偏移量:0例:I =582 ,对应电流为58.2A BYTE8 充电电流高字节3.2.2第二帧C2:充电机交流输入信息ID 0x07C2DDCC 周期(ms)20PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)001 11 C2 DD CC数 据 域位置 数 据 名 数 据 说 明BYTE1 交流输入电压低字节 0.1V/bit 偏移量:0例:V =3201,对应电压为320.1v BYTE2 交流输入电压高字节BYTE3 三相电流Ia低字节 0.1A/bit 偏移量:0例:I =582 ,对应电流为58.2A BYTE4 三相电流Ia高字节BYTE5 三相电流Ib低字节 0.1A/bit 偏移量:0例:I =582 ,对应电流为58.2A BYTE6 三相电流Ib高字节BYTE7 三相电流Ic低字节 0.1A/bit 偏移量:0例:I =582 ,对应电流为58.2A BYTE8 三相电流Ic 高字节3.2.3第三帧C3:充电机APF侧运行信息码与温度ID 0x07C3DDCC 周期(ms)20PRI (3bit)Resv(2bit)FunctionCode(8bit)DestAddr(8bit)(8bit)SourceAddr(8bit)001 11 C3 DD CC数 据 域位置 数 据 名 数 据 说 明BYTE1 APF信息码1 Error_1, 16进制数,具体数值含义,参阅充电机相关操作文件BYTE2 APF信息码2 Error_2, 16进制数,具体数值含义,参阅充电机相关操作文件BYTE3 APF信息码3 Error_3, 16进制数,具体数值含义,参阅充电机相关操作文件BYTE4 APF信息码4 Error_4, 16进制数,具体数值含义,参阅充电机相关操作文件BYTE5 APF充电机温度1 PWM整流侧机箱温度。
纯电动车BMS与整车系统CAN通信协议书范本
纯电动车BMS与整车系统CAN通信协议书范本【注意:以下协议书范本仅为演示用途,实际情况可根据具体需求进行相应调整】一、引言本协议书旨在规范纯电动车电池管理系统(BMS)与整车系统之间的通信协议,确保两个系统之间的数据交换和信息传输的稳定和准确。
该通信协议基于控制器局域网(Controller Area Network,CAN)技术,并遵循相关国际标准。
本协议书适用于车辆制造商、BMS供应商以及相关技术人员。
二、通信协议规范1. CAN通信协议a. CAN通信速率:根据实际车辆需求确定,一般为250kbps或500kbps。
b. CAN物理层:遵循ISO 11898标准。
c. CAN帧格式:使用标准CAN 2.0A或CAN 2.0B帧格式。
d. CAN标识符:根据车辆厂商约定进行分配。
e. BMS节点:BMS设备在CAN总线上作为一个节点存在,使用独立的CAN标识符进行通信。
2. 数据格式a. 数据长度:BMS与整车系统之间交换的数据长度为8字节,每个字节包含8位。
b. 数据格式:BMS与整车系统采用统一的数据格式,包括数据类型、数据单位等信息。
具体格式由车辆制造商和BMS供应商协商确定。
3. 数据交互a. 数据采集:BMS负责采集电池相关参数,如电压、温度、电流等。
b. 数据传输:BMS将采集到的数据通过CAN总线传输给整车系统。
c. 故障诊断:整车系统可向BMS发送命令以获取电池状态、报警信息等。
d. 数据解析:整车系统根据协议定义解析接收到的数据,以确保准确读取和使用。
4. 错误处理a. 数据校验:BMS和整车系统使用CRC校验确保数据传输的准确性。
b. 异常处理:BMS和整车系统应具备异常处理机制,对通信错误和故障进行处理和报警。
5. 通信安全性a. 数据加密:可根据实际需求采用加密技术,确保通信数据的安全性。
b. 认证授权:BMS与整车系统之间的通信可采用认证和授权机制,确保只有合法的系统才能进行通信。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信 号 , 速等 . 车 因为本 文使 用 的电机 只能 接 收模 拟 信号 , 且无 电流 或 电 压 反 馈 , 电机 的信 号 不 通 过 故 C N总线 , 接 由整 车控 制器 发 送 P A 直 WM 波 形 电压
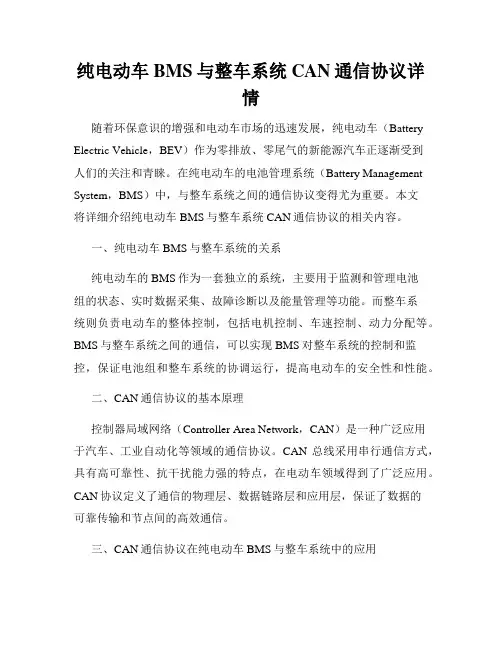
( 即燃 料 电池 ) 仪表 、 载充 电机 以及 电 机 . 们 、 车 它 通过 C N总线 连接 起来 . 车 控 制器 犹 如 人体 中 A 整 的大脑 , 根据 车辆 行驶 模 式 、 档位 、 动踏 板和 加速 制 踏板输 入 的信号 , 收各个 零 部件 控 制器 发 出的信 接
控制其 工作 状态 .
’』 . 1 . l C— ’ ’ ’ AH N
CAN— L
图 2 带增程器 电动汽车网络系统拓扑结构图
注 :
1 档 位 )
表示 电气连接 ; 线 表 示 控 制 信 号 连 接 ; 上 的箭 虚 线 头表示 信号 及能量 流 动 的方 向 ; 点划线 方 框 内表示
增 程 器 , 括 氢 瓶 、 堆 、 料 电池 控 制 器 和 D / 包 电 燃 C D E转换 器 . 带增 程 器 电动 汽车 动力 系统 由以下 几 大 部件 构 成 : 车 控 制 器 、 力 蓄 电池 组 、 程 器 整 动 增
本 文提 及 的增程 器是 以氢气 为燃 料 , 可插 拔 的
考虑 到将 来 C N 网络 的 扩 展 , 预 留一 部 分 字 节 A 可 或位 , 以便将 来进 行修 改 … .
2 2 网络 系统拓 扑结 构 .
燃料 电池 , 根据续 航 里程 需求 来 决定 是 否搭载 在整 车上 . 1给 出 了动力 系 统 结构 图 . 图 中 , 线 图 在 实 带增程 器 电动汽 车结 构较 为 复杂 , 与传 统 电动
中图分 类号 : U 6 . 4 36 文献标 识码 : A
0 引 言
纯 电动汽 车 因其 节 能环保 特点 , 众人 有 口皆碑
.
求来决 定是 否搭 载在 整车 上 . 捷灵 活 , 足人们 便 满
的出行 需求 .
C N C nrl rA e e ok 即 控 制 器 局 域 A ( o t l raN t r ) oe w
①
收稿 日期 :0 0—1 O 21 2一 1 作者简介 : 冯江波 (9 7一) 女 , 18 , 海南澄迈人 , 同济大学 汽车学院 , 硕士研究生
第 1期
冯 江波 : 带增 程 器 电动 汽车 动 力总成 系统 C N总 线通讯 协议 制 定 与测 试 A
l 带增程器 电动汽车动 力总成 系统结构
汽车 相 比 , 加 了增 程 器模 块 . 2给 出了动力 系 增 图 统 网络 系统 拓 扑结 构 . 线上 有 五 个控 制 器 , 别 总 分 为 : 车控制 器 ( MS 、 电机 控 制 器 ( C) 蓄 电 整 V )充 C 、
池 控制 器 ( M) 增 程 器控 制 器 ( E) 仪 表显 示 控 B 、 R 、 制 器 ( P Y 其 中 , 料 电池 控制 器 根 据 行 驶 需 D L ). 燃 求决 定是 否连 接 在 网络 总线 J 为方 便 起见 , 二. 下文 中各个 控 制器 的名 称 将采 用英 文 简称 . 表 1 V MS发 往 B D L M、 P Y和 R E的数据 帧
但 成本 高和续驶 里程 短成 为 电动汽 车发展 的 主要
网 , 有 成本 低 、 用 率 高 、 输 距 离远 、 输 速率 具 利 传 传 高和可 靠性 强等 特性 . 别说 明 的是 ,A 特 C N节点配
置灵 活 , C N 网络 上增 添或 减少 节点 时 , 总线 在 A 对
瓶 颈 . 程器 , 增 即增 加 续 驶 里 程 的装 置 , 一 概 念 这 的提 出解 决 了纯 电 动车 的续 驶 里 程 问 题 . 文 采 本 用小 功率燃 料 电池 作 为 电动 汽 车 增 程 器 . 混合 与
动力 车不 同 , 增程 器 是 可 插拔 的 , 根据 续 航 里 程需
上 其他节 点没 有影 响 . 就是 说 , 也 不管 增程 器插 拔
与否 , 总线上 的节 点均 可正 常运行 .
,
’
一
Ra c tn e, ng E ̄ e d r
、1 动 力 系 统结 构 图
J n a .
2 1 0 l
文 章编 号 :0 8—10 (0 1 O 0 1 10 4 2 2 1 ) 1— 0 4—0 5
带 增 程 器 电 动 汽 车 动 力 总 成 系 统 C N 总 线 A 通 讯 协 议 制定 与测试①
冯 江波
( 同济 大 学 汽 车 学 院 , 海 2 10 ) 上 0 84
第2 9卷 第 1期
2 1 年 0 月 01 1
佳 木 斯 大 学 学 报 ( 自 然 科 学 版 ) Jun l f i ui nvr t N trl c neE io ) o ra o a s U i sy( a a Si c dt n Jm ei u e i
Vo - 9 No 1 l2 .
摘
要 : 结合 带增程 器 电动汽 车动 力 系统 的结构特 点 , 定 出相 对 应 的 C N 总线通 讯协 议 , 制 A 并
用 C N e 行仿 真测试 验证 该协 议 的稳定性 及 可靠性 , A o进 结果表 明各 节 点均 能 够及 时 可靠地 发送 和接 收信 息 , 线 负载 率较低 , 总 总线运行 情 况 良好 , 本协议 的制 定是 符 合设 计要 求 的 . 关键词 : 增 程 器 ; 电动 汽 车 ; A C N总线 ;A o C Ne