一种极点配置算法在SISO系统中的应用
广西大学现代控制理论期末考试题库之分析论述题(含答案)
1. 论述Lyapunov 稳定性的物理意义,并说明全局指数稳定、指数稳定、全局一致渐近稳定、全局渐近稳定、一致渐近稳定、渐近稳定、一致稳定、稳定间的关系。
答:李雅普诺夫渐近稳定性定理的物理意义:针对一个动态系统和确定的平衡状态,通过分析该系统运动过程中能量的变化来判断系统的稳定性。
具体地说,就是构造一个反映系统运动过程中能量变化的虚拟能量函数,沿系统的运动轨迹,通过该能量函数关于时间导数的取值来判断系统能量在运动过程中是否减少,若该导数值都是小于零的,则表明系统能量随着时间的增长是减少的,直至消耗殆尽,表明在系统运动上,就是系统运动逐步趋向平缓,直至在平衡状态处稳定下来,这就是李雅普诺夫意义下的稳定性。
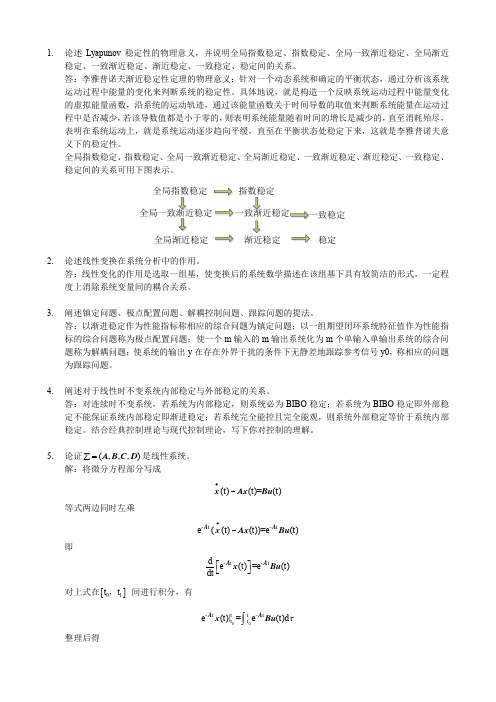
全局指数稳定、指数稳定、全局一致渐近稳定、全局渐近稳定、一致渐近稳定、渐近稳定、一致稳定、稳定间的关系可用下图表示。
全局渐近稳定渐近稳定稳定2. 论述线性变换在系统分析中的作用。
答:线性变化的作用是选取一组基,使变换后的系统数学描述在该组基下具有较简洁的形式,一定程度上消除系统变量间的耦合关系。
3. 阐述镇定问题、极点配置问题、解耦控制问题、跟踪问题的提法。
答:以渐进稳定作为性能指标称相应的综合问题为镇定问题;以一组期望闭环系统特征值作为性能指标的综合问题称为极点配置问题;使一个m 输入的m 输出系统化为m 个单输入单输出系统的综合问题称为解耦问题;使系统的输出y 在存在外界干扰的条件下无静差地跟踪参考信号y0,称相应的问题为跟踪问题。
4. 阐述对于线性时不变系统内部稳定与外部稳定的关系。
答:对连续时不变系统,若系统为内部稳定,则系统必为BIBO 稳定;若系统为BIBO 稳定即外部稳定不能保证系统内部稳定即渐进稳定;若系统完全能控且完全能观,则系统外部稳定等价于系统内部稳定。
结合经典控制理论与现代控制理论,写下你对控制的理解。
5. 论证(,,,)∑=A B C D 是线性系统。
解:将微分方程部分写成()()=()t t t ∙x Ax Bu -等式两边同时左乘--e(()())=e ()tt t t t ∙A A x Ax Bu -即--d e ()=e ()d tt t t t ⎡⎤⎣⎦A A x Bu对上式在[]01t t , 间进行积分,有00--e ()|=e ()d t t t t t t t t τ⎰A A x Bu00---(-)()=e +e ()d t t t t t t C τττ⎰A A x Bu ()于是代数等式部分有00---(-)0()=e +e ()d ()()t t t t t y t C x Du t L u τττ+=⎰A A Bu ()用叠加定理验证可知,仅当00x =时,此系统是线性系统。
江苏大学线性系统理论(现代控制理论)考试必备--第6章.答案
=
C R
P1
CP1
RP
1
I qq 0
0 I ( n q )( n q )
再来讨论(n-q)维状态观测器的构建,用线性变换 x = Px,
将方程(1)变换成
x = PAP-1x + PBu y = CP-1x = CP-1x = Iqq 0 x
记 : A=PAP-1 B=PB
C CP1
以足够快的速度趋近于零,也就是说,不管状态观测器的
初始状态如何,状态观测器所重构的状态变量 xˆ 终将逐渐
趋近于实际状态 x ,所以,这样的状态观测器也称之为渐 进状态观测器。该性质也使其在实际使用中毋需设置初始 状态。
第6章 状态观测器
江苏大学电气学院
值得一提的是,虽然 (A-MC) 特征值的负实部离虚
i (A C M ) i , i =1,2, , n
求出M后,即可构成闭环状态观测器:
xˆ = (A - MC)xˆ + My + Bu
(8)
第6章 状态观测器
江苏大学电气学院
全维状态观测器的另一种设计方法是,先对被观测系
统进行非奇异变换 z=T,x 再从形式上列出类似于式(8)
的观测器方程。
B
x
x C
y
A
xˆ 0
B
xˆ
xˆ C
yˆ
A
第6章 状态观测器
江苏大学电气学院
这样的观测器称为开环状态观测器,从开环状态观测
器中取出 xˆ 可作为 x 的估计值近似替代,当然希望 xˆ 与x 是相等的。用 x 来表示 x 和 xˆ 的偏差,即 x x xˆ , 下面来简单分析估计偏差 x的特性。式(1)和式(2)相减得
极点配置法设计状态反馈控制器——自动控制原理理论篇
设计算法--适用于用能控标准形表示的SI系统的算法
a0 f1 0 a1 f 2 1
an1 f n n1
f1 0 a0 f2 1 a1
fn n1 an1
举例
例8-21 设系统的状态空间描述为
x(t)
0 6
1 0 5x(t) 1u(t)
y(t) 2 1x(t)
试求:(1)求状态反馈矩阵F使闭环系统有期望 极点s1,2=-3±2j; (2)绘制带有状态反馈控制器的状态变量图
举例----求解过程
解: 0
B 1
0 1 0 1 AB 6 51 5
rankS
rankB
AB
0 1
1 5
2
系统能控。
举例----求解过程
期望闭环系统特征多项式为:
(s s1)(s s2 ) (s 3 2 j)(s 3 2 j) s2 6s 13
设: F f1 f2
s sI A BF
6 f1
SI系统,所以设 F f1 f2 fn
| sI A BF |
0 1
0 0
s 0
0
s
s
0
a0
0 a1
1
0
1
0
f1
f
2
f
n
an1 1
极点配置法设计状态反馈控制器
——《自动控制原理-理论篇》第8.8节
极点配置法设计状态反馈控制器——自动控制原理理论篇
——《自动控制原理-理论篇》第8.8节
自动化工程学院自动控制原理课程组制 2015年11月
主要内容
状态反馈控制系统 状态反馈控制器设计条件 用极点配置法设计状态反馈控制器 举例
主要内容
状态反馈控制系统 状态反馈控制器设计条件 用极点配置法设计状态反馈控制器 举例
SI系统,所以设 F f1 f2 fn
| sI A BF |
0 1
0 0
s 0
0
s
s
0
a0
0 a1
1
0
1
0
f1
f
2
f
n
an1 1
设计算法--适用于用能控标准形表示的SI系统的算法
a0 f1 0 a1 f 2 1
an1 f n n1
f1 0 a0 f2 1 a1
fn n1 an1
举例
例8-21 设系统的状态空间描述为
x(t)
0 6
1 0 5x(t) 1u(t)
rankB
AB
0 1
1 5
2
系统能控。
举例求解过程
期望闭环系统特征多项式为:
(s s1)(s s2 ) (s 3 2 j)(s 3 2 j) s2 6s 13
设: F f1 f2
s sI A BF
6 f1
1x(t)
F 7 1
基于极点配置与最优控制的磁悬浮系统控制器
0引言
磁悬浮技术是集电磁学、控制工程、信号处理、 机械学、动力学等多门学科于一体的新型高科技技
术⑴。磁悬浮技术因其无接触、无摩擦等特点而具 有能耗低、污染小、噪声小等优点,因此在各领域 被广泛应用⑵。但由于磁悬浮系统本质上是不稳定 的,所以为使系统稳定,必须加入反馈控制环节使
基金项目:国家自然科学基金青年科学基金(批准号:61803264) 作者简介:王翼(1997-),男,本科,学生,主要研究方向为仪器测量与控制;张凤登(1963_),男,博士,教授,主要从事检测技术与 自动化等方面的教学与科研工作;吉妍(1999-),女,本科,主要研究方向为光学工程;范鑫怡(1998-),女,本科,主要研究方向为光学工 程;张文婷(1997_),女,本科,主要研究方向电子信息工程。 通讯联系人:王翼(1998-),男,本科,主要研究方向为仪器测量与控制。
[Abstract] : The structure and working principle of the ''magnetic suspension ball experimental system" are intro duced in detail. The physical model of the magnetic suspension ball experimental system is established. The system state space expression is derived based on the physical model, and the system mathematical model is established. The stability, controllability and observability of the system are established. The system simulation model is estab lished in the Matlab/Simulink environment to study the dynamic characteristics of the control system. In order to re alize the fast and stable control of the magnetic suspension ball experimental system, two control methods, the pole placement algorithm and the optimal control algorithm, are proposed to design the state feedback controller. The de sign rationality of the controller and the observer is analyzed through experimental simulation. Experiments show that the pole placement method can quickly change the response performance of the magnetic levitation system by changing the desired pole. The optimal control method can change the response performance of the magnetic levitation system by changing the Q and R matrices, and both can effectively control the magnetic levitation experimental system. [Key words] : Magnetic suspension ball experimental system; Pole placement; Optimal control; Simulink simula tion; State feedback control
能控标准型和Jordan标准型在三阶SISO系统极点重新配置中的应用
L
。 系统能控标准型状态 。 ⑨该线性定常 S I S O 空间表达 w 式 如 下 。 。
线性定常 S I S O受控系统的数学模型主要有三种 :
O l
一
( 1 ) 微 分方程厂 ( , ” , … ” ) =g ( x ( n - I ) , … ” ,
系 统极点的重新配置 。 此 ( ) 的 部 分 分 式 展 开 式 如 下 G( ) = =石 3
基础 ,讨论该系统 J o r d a n 标准型状态空间表达式的建立
1 线性定常 S I S O 系统状态空 间表达式的建立 这里主要讨论 S I S O 受控系统由传递 函数求取 能控 标准型和 J o r d a n标准型 实现 的情况 。对系统 完成极 点配
能控标 准型 和 J o r d a n标准型在三 阶 S I S O系统极点重新配置 中的应用
裴洲奇
( 大连海洋大学职业技术学院 辽 宁 -大 连 1 1 6 3 0 0)
摘 要 线性定常连续三 阶单输 入单输 出受控 系统包含三个状态变量,本文主要研 究对其 中每一个状态变 量I x 。 ( t ) ( , )X 3 ( f ) ] 设立必 要的状态负反馈 。 使该 系统在状态完全可控 的前提下 。 完成 系统极点在 复平面内
( 2 ) 继 续 以受 控 系 统 传 递 函 数 ( )
系统建模 时, 由于状态变的传 递函数G o ( ) 可能会 存在不同形 式的状态空间表达式模 型。 本文 中采 用对能控标准型和 问题 。 ① 受控系统传递函数的极 点分布为 =. 2 , S : =一 1 ; 因 J o r d a n标 准 型 设 立 状 态 反 馈 阵 K( r x n ) 的 方 法 完 成 受控
多输入系统极点配置例题
多输入系统极点配置例题篇一:多输入系统极点配置是指将一个输入系统映射到一组极点上,以便在程序中对其进行控制。
极点配置是输入系统设计中的一个重要概念,可以用于优化输入系统的性能和响应特性。
本文将介绍多输入系统极点配置的基本概念和例题,并探讨其在实际应用中的重要性。
正文:1. 多输入系统极点配置的基本概念多输入系统极点配置是指将一个输入系统映射到一组极点上,以便在程序中对其进行控制。
极点是输入系统中的一组点,它们描述了输入系统的动态特性。
极点配置是将输入系统的动态特性映射到一组极点上的过程,以便在程序中对其进行控制。
在多输入系统中,极点配置通常用于优化输入系统的性能和响应特性。
例如,在语音识别系统中,极点配置可以用于优化语音信号的处理方式,以获得更准确的语音分析和识别结果。
在运动控制系统中,极点配置可以用于优化传感器数据的采集和分析,以提高运动控制性能和稳定性。
2. 多输入系统极点配置例题下面是一个典型的多输入系统极点配置例题,用于说明极点配置在实际应用中的重要性。
例题:一个汽车自动驾驶系统汽车自动驾驶系统需要对道路和交通信号进行感知和识别,以控制汽车的运动和行驶方向。
该系统需要一个输入系统来描述道路和交通信号的状态,以及汽车所需的运动参数。
极点配置示例如下:- 道路状态:道路分为两条平行的直线,一条向左弯曲,一条向右弯曲。
- 交通信号状态:交通信号分为黄色信号、绿色信号和红色信号。
- 汽车运动参数:汽车的速度为零,加速度为向右施加。
通过这个极点配置,系统可以实时感知道路和交通信号的状态,并根据所需的运动参数控制汽车的运动。
这个极点配置可以通过软件实现,也可以通过硬件传感器和控制器来实现。
拓展:极点配置在实际应用中有许多应用场景,可以用于优化系统的性能和稳定性。
例如,在语音识别系统中,极点配置可以用于优化语音信号的处理方式,以获得更准确的语音分析和识别结果。
在运动控制系统中,极点配置可以用于优化传感器数据的采集和分析,以提高运动控制性能和稳定性。
圆盘区域极点配置在发电机励磁系统控制器模型中的应用分析

圆盘区域极点配置在发电机励磁系统控制器模型中的应用分析摘要:圆盘区域极点配置法是电力系统稳定性分析中常用的一种方法,可以有效地调节系统的稳态和动态性能。
本文将该方法应用于发电机励磁系统控制器模型中,探讨了其应用效果。
首先介绍了圆盘区域极点配置法的基本原理,然后使用MATLAB 对发电机励磁系统控制器模型进行了仿真,并分析了不同的圆盘区域极点配置方案对系统的影响。
最后结论是,圆盘区域极点配置法在发电机励磁系统控制器模型中具有较好的应用效果,可以显著改善发电机系统的稳态和动态性能。
关键词:圆盘区域极点配置,发电机励磁系统,控制器模型,稳态性能,动态性能正文:一、引言发电机励磁系统是电力系统中重要的组成部分,对电力系统的稳态和动态性能起着至关重要的作用。
近年来,电力系统的电能质量要求越来越高,对发电机系统的稳态和动态性能要求也越来越高。
因此,在发电机励磁系统控制器设计中,如何提高其控制性能成为了研究的重点。
圆盘区域极点配置法是电力系统稳定性分析中常用的一种方法,它通过调节系统控制器中的参数,使系统具有更好的稳态和动态性能。
在发电机励磁系统控制器中应用该方法,可以显著改善系统的稳态和动态特性,提高发电机系统的控制性能。
本文将圆盘区域极点配置法应用于发电机励磁系统控制器模型中,通过仿真实验探讨了其应用效果,对发电机系统的稳态和动态特性进行了分析,为电力系统稳定性分析和控制提供了新的思路和方法。
二、圆盘区域极点配置法的基本原理圆盘区域极点配置法是电力系统稳定性分析中的一种常用方法,它是一种基于根轨迹的控制器设计方法,利用根轨迹的理论分析系统的稳态和动态特性,并调节系统的控制器参数以达到优化控制效果。
圆盘区域极点配置法的基本原理是,在根轨迹上选取一个圆盘区域,将系统的所有极点调节到该圆盘区域内,从而使得系统具有更好的稳态和动态性能。
具体来讲,该方法可以分为以下几个步骤。
(1)根据系统特性,选择适当的圆盘区域半径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 状 态 反 馈 加 输 出 至 反 馈 极 点 配 置 法 概 要 及 工 程 改 进
考 虑 SS 系 统 IO
{ A +“ = 6 ,
’
( 1 ) )
:
c工
其 中 , 为 n× n常 阵 ,b为 ”维 列 向量 , A c为 , 维行 向量 .在 传 统 极 点 配 置 方 法 问 题 的讨 论 中 已经 给 z
关 键 词 : S S 系 统 ; 极 点 配 置 ; 状 态 反 馈 ; 输 出反 馈 IO
中 图分 类 号 :TP2 1 . 1 7 6
文 献 标 识 码 :A
文 章 编 号 :1 0 — 3 2 ( 0 2 0 — 2 10 0 77 3 2 0 ) 30 0 — 4
2 2 0
焦 作工学 院学报 ( 自然 科 学 版 )
20 0 2年 第 2 l卷
系统 工 作 于伺 服 状 态 时 ,通 常 还 需 要 引 入 输 入 变 换 放 大
器 L 以满 足 工 程 指 标 要求 ,此 时 系 统 结 构 如 图 1所 示 . 从 图 1易 推 得 极 点 配 置 后 相 应 系统 的状 态 空 间描 述 为
此 系统 完 全 能 观 l .
本 文 采 用 的 方 法 依 然 是 将 上 述 两 种 方 法 结 合 起 来 , 即 同 时 使 用 状 态 反 馈 和 输 出反 馈 J .这 种 方 法 不 但适 用 于 仅 能 控 或仅 能 观 的线 性 系 统 , 而 且 在 一 定 条 件 下 还 适 用 于 那 些 既 不 能 控 又 不 能 观 的 系 统 .我们 可 以 通 过 对 系统 ( ) 引 入 线 性 非 奇 异 变换 P ,使 之 化 成 约 当 标 准 型 ,然 后 按 照 能 控 能 观 判 1
维普资讯
焦 作工学 院学 报 ( 自然 科 学 版 ) 第 2 , 1卷 , 第 3期 ,2 0 0 2年 5月
J u n lo io u n t u eo c n lg Na ua ce c ) o r a fJa z o I si t fTe h oo y( t r l in e ,Vo . , No. t S 121 3,Ma 0 2 y2 0
摘 要 :极 点 配置 问题 是 线 性 系统 综合 中的 一 类 重 要 问 题 。尤 其 是 S S 系统 的极 点 配 置 , 它 IO 在 整 个极 点 配 置 问题 中发 挥 着 重 要 作 用 ,在 很 大 程 度 上 促 进 着 M I MO 系统 极 点 配 置 问题 的 解 决 .为 了 能对 实际 中一 些不 可控 或 不 可 观 的 S S 系统 也 进 行 极 点 配 置 。采 用 了将 状 态反 IO
0 引 言
极 点 配 置 问 题 在 线 性 控 制 系统 中发 挥 着 重 要 作 用 .通 过 极 点 配 置 ,可 以实 现 系 统 的渐 近稳 定 ;还
可 以优 化 系统 的 动 态 性 能 ,例 如减 少 过 渡 过 程 中 的 超 调 量 ,缩 短 过 渡 过 程 时 间 等 . 然 而 到 目前 为 止 ,
收 稿 日期 :2 0 - l2 ; 修 回 日期 : 2 0 — 32 0 1 l- 6 0 20 —0 作 者 简 介 :李 玉 东 ( 9 4) 男 . 河 南 商 丘 人 .助 理 工 程 师 . 现 从 事 电 路 实 验 教 学 研 究 工 作 17 - ,
维普资讯
关 于 极 点 配 置 的方 法 论 述 不 是 计 算 过 程 过 于 复 杂 或 不 确 定 性 因 素 太 多 ,就 是 其 方 法使 用 范 围太 窄 ,适 用 性 不 强 .本 文 针 对 这 些 情 况 ,从 应 用 角 度 出发 ,在 S S 系 统 中使 用 了状 态 反 馈 和 从 输 出 至 反 馈 IO 相 结 合 的 配 置 方 法 ,并 把 该 法 和 相 对 简 化 的Va skM 和 Ac ema nJ算 法 结 合 起 来 ,克 服 了 求 状 态 l e a kr n 反 馈 阵时 的不 确 定 性 ,从 而 形 成 了 S S 系统 中 一 种 较 适 合 工 程 控 制 需 要 的 极 点 配 置 算 法 . IO
出 如下 命 题 :
命 题 1 线 性 定 常 系统 ( ) 可通 过 线 性 状 态 反 馈 任 意 配 置 其 全 部 极 点 的 充 要 条 件 是 此 系 统 完 全 1
能 控 பைடு நூலகம்
命 题 2 线 性 定 常 系 统 ( ) 可 通 过从 输 出 至 的线 性 反 馈 实 现 闭 环 极 点 任 意 配 置 的 充 要 条 件 是 1
一
种 极 点 配 置 算 法 在 S S 系 统 中 的 应 用 IO
李 玉 东 ,孔 德 星 , 匡 森 彭 红 星 ,
( 焦 作 工 学 院 电 气 工 程 系 ,河 南 焦 作 4 4 0 1 5 0 0;2 焦 作 鑫 安 集 团 有 限 责 任 公 司 生 产 技 术 部 , 河 南 焦 作 4 4 0 ) . 5 0 0
馈 和 从 输 出 至 士 反 馈 相 结 合 的 配 置 方 法 , 并 引 入 了 惟 一 确 定 状 态 反 馈 阵 时 先 进 的 Va sk M l e a
和 Ac ema nJ算 法 ;最后 结 合 工 程 实 际 ,说 明 了该 算 法 在 控 制 系统 中的 具 体 应 用 . kr n
别 的 Gi et 则 判 出各 状 态 变 量 的 能 控 性 和 能 观 性 ,最 后 按 能 控 能 观 、 能 控 不 能 观 、不 能 控 能 观 、 l r准 b 不 能控 不 能 观 四种 类 型 分 类 排 列 ,即 可组 成 相 应 的 子 系统 .考 虑 到 控 制 工 程 实 际 的 现 场 问 题 ,当控 制