【完整版】气囊减重步行训练有限元分析
有限元法分析不同固定方式在胫骨远端粉碎性骨折骨愈合中的生物力学差异
有限元法分析不同固定方式在胫骨远端粉碎性骨折骨愈合中的生物力学差异颜华东;张中;赵刚;李杰;宋华;孙建华;刘志;王明明【期刊名称】《中国组织工程研究》【年(卷),期】2024(28)24【摘要】背景:胫骨远端粉碎性骨折伴软组织损伤的治疗具有挑战性,新型逆行胫骨髓内钉、外置接骨板是重要的治疗手段,但其在骨折愈合不同时期、不同负重情况时的骨折端应变、应力遮挡情况未见报道。
目的:通过有限元分析法探讨骨折愈合不同时期逆行髓内钉及外置接骨板的生物力学差异,为临床应用及康复锻炼提供科学参考。
方法:利用1名40岁健康男性的胫骨CT数据,建立胫骨远端粉碎骨折的有限元模型,构建胫骨逆行髓内钉、外置接骨板固定模型及骨痂模型并根据骨折的固定原则进行装配。
使用ANSYS软件进行有限元分析,比较骨折愈合不同时期时逆行髓内钉及外置接骨板2种固定方式的骨折端位移、胫骨应力遮挡、骨痂应力、胫骨及固定装置应力分布情况。
结果与结论:①胫骨骨折端相对位移随着骨折愈合的进行逐渐减小,在术后3个月后位移明显减少;术后0,1个月,外置接骨板组的垂直位移及总位移均大于逆行髓内钉组,2种固定方式的Z轴位移(水平内外侧位移)均较X、Y轴位移明显,且接骨板模型的Z轴位移差异最明显;2种固定方式的Z轴位移最大位置均位于胫骨外侧,位移最小位置均位于胫骨内侧;②骨折愈合的应力遮挡率随骨折时间延长而逐渐降低;逆行髓内钉的应力遮挡率在骨折愈合不同时期均高于外置接骨板;术后3个月后外置接骨板的应力遮挡率降低到4%左右,逆行髓内钉的应力遮挡率降低到40%左右;③2种固定方式骨痂应力集中部位的应力随着载荷的增大而增加,外置接骨板组骨痂的应力始终大于逆行髓内钉组;2种固定方式中,骨痂最大应力大致分布一致,均位于胫骨外侧部分;④随着骨折愈合2种固定方式的胫骨最大应力逐渐降低,外置接骨板组的应力始终大于逆行髓内钉组;1500 N载荷下外置接骨板组胫骨最大应力区域平均应力为285 MPa,而逆行髓内钉组为26 MPa;⑤随着骨折愈合2种固定模型中固定装置的应力逐渐降低,外置接骨板组的应力均明显高于逆行髓内钉组;术后3个月以后,2种固定装置的应力下降幅度明显变缓;⑥提示在骨折愈合早期,胫骨逆行髓内钉组中骨折端应变小、胫骨最大应力适中,允许早期负重;外置接骨板组骨折端存在应变过大、胫骨最大应力过大,需在保护下部分负重、不能完全负重;在骨折愈合中后期,胫骨逆行髓内钉及外置接骨板组均可完全负重,接骨板的应力遮挡率明显低于胫骨逆行髓内钉。
FL-61风洞壳体有限元分析与气压试验
FL-61风洞壳体有限元分析与气压试验都鹏杰【摘要】The finite element model of FL-61 wind tunnel is established,using the software of Patran,based on the method of finite element.The deformation and stress distribution of the wind tunnel shell are analyzed under the condition of ultimate pressure.The analysis results are compared with the gas pressure test.It shows that the deformation and stress of the wind tunnel shell which is calculated in software is approximately same as the pressure test result.In addition,the compared result shows that the processing methods of simplified model and adopting the element form are feasible,the boundary restrict and loads are reasonable,and the wind tunnel shell satisfy its requirement.%基于有限元理论,应用Patran软件创建FL-61风洞壳体的有限元模型,分析其在极限压力工况下整体结构的刚强度情况;并与气压试验结果进行了对比.结果表明:在气压试验载荷作用下,风洞壳体的变形及应力计算结果与试验结果基本吻合.验证了有限元计算中对风洞模型进行的简化处理、选用的单元类型、边界和载荷条件的施加合理可行,风洞壳体的刚强度满足设计使用要求.【期刊名称】《科学技术与工程》【年(卷),期】2017(017)008【总页数】4页(P303-306)【关键词】洞体回路;有限元法;应力分析;气压试验【作者】都鹏杰【作者单位】中航工业空气动力研究院,沈阳 110034【正文语种】中文【中图分类】V211.74FL-61风洞是由中航工业空气动力研究院建设的单回流、变密度、低温连续式跨声速风洞。
气囊有限元简化模型的建立及弹簧系数变化规律研究
气囊有限元简化模型的建立及弹簧系数变化规律研究
卓义金;李志刚;旷鹏
【期刊名称】《国防交通工程与技术》
【年(卷),期】2010(008)004
【摘要】考虑到气囊模型的特性与弹簧模型的特性相似,利用有限元法把复杂的气囊模型简化为常用的弹簧模型.弹簧系数通过作用力与位移的关系体现,其大小与气囊的内压、相互间接触位置(倾角)及直径有关.探讨了弹簧系数在不同气囊参数下的变化规律,为其在工程保障中的应用打下基础.
【总页数】5页(P14-17,27)
【作者】卓义金;李志刚;旷鹏
【作者单位】解放军理工大学工程兵工程学院,江苏南京210007;解放军理工大学工程兵工程学院,江苏南京210007;解放军理工大学工程兵工程学院,江苏南京210007
【正文语种】中文
【中图分类】U671.5
【相关文献】
1.基于风压系数简化模型的圆柱形充气膜结构有限元分析 [J], 方圆;申跃奎;赵明;曹现雷
2.重整反应器扇形管有限元简化模型的建立与分析 [J], 王家禾
3.气囊在工程保障中的有限元简化模型研究 [J], 卓义金;李志刚;施威特
4.折叠式MEMS弹簧弹性系数研究与有限元分析 [J], 吴鹏飞;张国俊;戴丽萍;钟志
亲;王姝娅
5.间套作条件下作物根系数量与活性的空间分布及变化规律研究Ⅱ. 间作早春玉米根系数量与活性的空间分布及变化规律 [J], 赵秉强;张福锁;李增嘉;李凤超;张新春;申加祥;潘海军;赵甲美;尹玉波;武传杰
因版权原因,仅展示原文概要,查看原文内容请购买。
WY78-52型空气包的有限元分析及优化设计
WY78-52型空气包的有限元分析及优化设计陈灵强;蒲容春;王卫刚;刘宏亮;贺环庆;张力【摘要】采用经验类比和传统材料力学简化计算方法设计的空气包,其强度富裕、质量偏大.应用Pro/E对传统方法设计的空气包建立三维模型,应用ANSYS有限元分析软件对其进行应力分析,采用ASME标准进行强度校核,实现空气包结构的优化设计,既满足强度要求,又减轻了空气包的质量.%The analogy and traditional material mechanics experience simplified calculation method of the air bag design, rich strength, and quality too large. The traditional method Pro/E of was used to design air bag and obtained 3d model. The application of ANSYS finite element analysis software was used for the stress analysis,the ASME specifications for strength check as well,to realize the air bag structure optimization design, which can meet the demands on strength and reduce the quality of the air bag.【期刊名称】《石油矿场机械》【年(卷),期】2012(041)004【总页数】4页(P30-33)【关键词】空气包;强度;有限元分析;优化设计【作者】陈灵强;蒲容春;王卫刚;刘宏亮;贺环庆;张力【作者单位】宝鸡石油机械有限责任公司,陕西宝鸡 721002;宝鸡石油机械有限责任公司,陕西宝鸡 721002;宝鸡石油机械有限责任公司,陕西宝鸡 721002;宝鸡石油机械有限责任公司,陕西宝鸡 721002;宝鸡石油机械有限责任公司,陕西宝鸡721002;宝鸡石油机械有限责任公司,陕西宝鸡 721002【正文语种】中文【中图分类】TE926.02随着钻井技术的发展,对钻井泵提出了更高的要求,需要设计出强度更高,质量更轻,载荷更大的空气包,满足钻深井的要求。
基于SolidWorks的康复减重步行训练车机架分析与优化
在人体行走运动过程中,下肢主要承担支撑、迈步和平衡三大功能。
一旦受损,为了恢复这些功能,运动训练是目前临床上广泛使用的康复手段,而减重步行训练是公认的最有效的疗法[1]。
由于患者下肢支撑力不足,为了帮助患者实现站立,必需配备一套减重支持系统。
康复减重步行训练车(后文简称减重车)是针对下肢功能损伤的患者改善运动能力的一种康复训练设备。
患者在符合规定的训练环境中进行步行训练过程中,减重车同步跟随患者移动,给患者提供辅助支撑。
同时,减重车配备减重悬吊装置,在训练过程中帮助患者减重,具有防摔功能。
因其与患者直接接触并提供减重支撑作用,其整体机架可靠性至关重要,必须有有效的方法对其进行分析并做优化设计。
SolidWorks 是目前主流的三维建模和分析软件,在完成零部件建模并作适当简化后导入其插件Simulation ,按设定网格尺寸生成有限元网格,加载边界条件后进行计算,计算后设定约束条件可做优化设计,极大地提高了设计可靠性和效率。
一般情况下,软件仿真分析结果与真实情况存在差异,需要通过试验测试进行校正。
笔者运用SolidWorks 及其插件Simulation 对减重车机架进行仿真和优化设计,以达到保证其结构体可靠的目的。
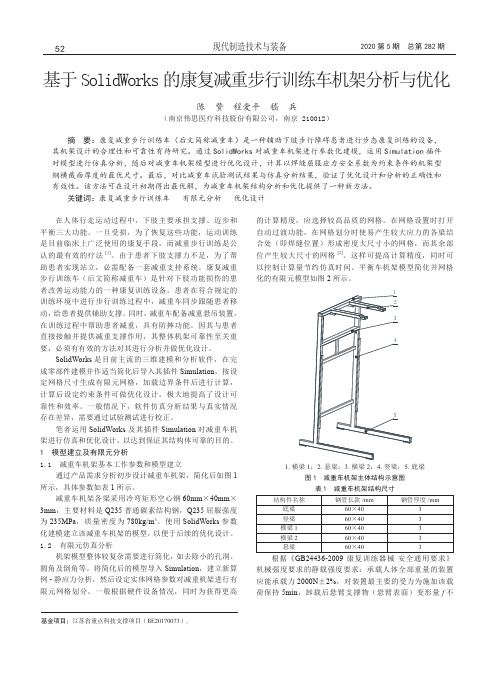
1 模型建立及有限元分析1.1 减重车机架基本工作参数和模型建立通过产品需求分析初步设计减重车机架,简化后如图1所示,具体参数如表1所示。
减重车机架各梁采用冷弯矩形空心钢60mm ×40mm × 3mm ,主要材料是Q235普通碳素结构钢,Q235屈服强度为235MPa ,质量密度为780kg/m 3。
使用SolidWorks 参数化建模建立该减重车机架的模型,以便于后续的优化设计。
1.2 有限元仿真分析机架模型整体较复杂需要进行简化,如去除小的孔洞、圆角及倒角等。
将简化后的模型导入Simulation ,建立新算例-静应力分析,然后设定实体网格参数对减重机架进行有限元网格划分。
新能源公交车轻量化气囊支座的设计和有限元分析
新能源公交车轻量化气囊支座的设计和有限元分析李军【摘要】In recent years, automobile industry has developed rapidly in China, especially after the country formulated the new energy strategy. All the OEMs of China are racing to develop the new energy automobile, one of them is new energy bus.The air spring support as one of key parts of the new energy bus' s chassis, it connects the air spring, traction bar, axle and many other parts, it plays the role of bearing and connection. It bears the weight of both vertical and longitudinal, so the design of air spring support is particularly important. At present, the air spring support of the new energy bus in the market on sale is mostly made of cast steel.In this paper, it explored and verified the finite element analysis method of air spring support through the 3D design of lightweight air spring support.%近几年来,中国汽车工业快速发展,尤其是国家制定新能源战略以后,全国各大主机厂争相研发新能源汽车,新能源公交车就是其中车型之一,气囊支座作为新能源公交车底盘关键的零件之一,连接着气囊总成、推力杆总成、车桥等许多零件,起着承载和连接的作用,它既承受垂向载荷又承受纵向载荷,所以气囊支座设计尤为重要.目前,市场上销售的新能源公交车的气囊支座大部分是采用铸钢.文章通过轻量化气囊支座3D方案设计,对气囊支座零件的有限元分析方法进行了探索并进行了验证.【期刊名称】《汽车实用技术》【年(卷),期】2019(000)005【总页数】5页(P21-24,40)【关键词】气囊支座;轻量化;Hyperworks;有限元;模态分析【作者】李军【作者单位】上海科曼车辆部件系统股份有限公司,上海 201815【正文语种】中文【中图分类】U469.7在当前保护环境的大前提下,传统汽车排放的一氧化碳、碳氢化合物和氮氧化合物等已占城市空气污染物的70%- 80%,成为城市空气污染的主要来源。
穿戴式跌倒护髋安全气囊系统自动充气机构的设计与实现
穿戴式跌倒护髋安全气囊系统自动充气机构的设计与实现随着人们对健康和生活质量的重视,穿戴式智能设备的开发越来越受到人们的关注。
在这些设备中,穿戴式跌倒护髋安全气囊系统是一种非常重要的设备,它可以在老年人或身体状况较差的人跌倒时自动充气,减少冲击力,从而防止骨折等伤害的发生。
本文将详细介绍穿戴式跌倒护髋安全气囊系统自动充气机构的设计与实现。
首先,穿戴式跌倒护髋安全气囊系统的自动充气机构应该具备以下三个特点:1.高效、快速的充气能力:为了保证系统能够及时响应,自动充气机构需要具备高效、快速的充气能力,从而在跌倒发生时可以尽快启动保护功能,减少受伤风险。
2.稳定可靠的充气控制:自动充气机构需要具备稳定可靠的充气控制技术,确保在跌倒状况下能够及时启动护髋气囊的防护功能。
3.低功耗的设计:为了保障设备的长期使用,自动充气机构需要采用低功耗设计,从而确保整个系统可以长时间运行。
基于以上三个特点,我们设计了一个自动充气机构,其最核心的部分是防护气囊和气泵。
当有跌倒事件发生时,穿戴式跌倒护髋安全气囊系统会通过传感器检测到身体的运动状态,然后触发气泵的启动,将气囊充气,从而保护身体。
具体实现方式如下:1.气泵的设计:根据系统的需求,我们选用了高效的单向阀,将气泵与防护气囊相连。
当判断到跌倒事件发生时,单向阀会及时打开,气泵开始工作,将空气充入气囊中。
2.气囊的设计:气囊需要选择柔软、耐磨损的材料,以便能够在接触钢铁物体时迅速充气,形成缓冲,吸收冲击力。
同时,为了保证安全性和耐用性,气囊的选材需要具有高强度材料,防止气囊破裂等情况发生。
3.电源的设计:为了保证设备能够持续工作,需要选择低功耗、高效率的电源模块,并采用恰当的电路保护电源模块,以防止电路短路、过载等不良情况。
在不使用情况下,为了延长产品的寿命,需要进行定期充电。
总的来说,穿戴式跌倒护髋安全气囊系统自动充气机构的设计与实现需要考虑到多种因素:高效、稳定、低功耗是设计的重点。
步行训练机器人主动减重控制方法
步行训练机器人主动减重控制方法方彬;沈林勇;章亚男;钱晋武【期刊名称】《上海大学学报(自然科学版)》【年(卷),期】2011(017)006【摘要】减重步行训练是治疗由神经疾病导致的下肢步行障碍的重要手段之一.步行康复训练中由于患者下肢无法承载自身的重量,难以保持自身的平衡,因此设计可为患者卸载自重,并帮助其保持平衡的减重支撑系统显得尤其重要.对课题组设计的减重支撑系统提出减重控制方法,并构建控制系统,最终通过实验论证其可行性.实验结果表明,该减重控制方法可以满足主动减重控制的要求.%Partial body-weight supported gait training is an important rehabilitation means in curing lower extremity walking drawback resulting from nerve diseases. As the patient is unable to support his/her own body weight and keep the body in balance during the treadmill training, the body weight support system that help the patient reduce the body weight and keep the body in balance is import for rehabilitation equipment. This paper describes a control method for the body weight support system designed in the laboratory, builds a control system and demonstrates its feasibility by experiments. Experimental results show that the proposed method can meet the requirements of the body weight support system.【总页数】5页(P719-723)【作者】方彬;沈林勇;章亚男;钱晋武【作者单位】上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072【正文语种】中文【中图分类】TP24【相关文献】1.机器人辅助步行训练设备中减重系统的设计 [J], 王文龙;王继荣;宋道富;刘广涛;姜云2.基于减重步行训练的下肢康复机器人结构设计与分析 [J], 赵俊;邹任玲;徐秀林;胡秀枋3.减重步行机器人训练对脑卒中患者步行能力的影响 [J], 刘华卫;王惠芳;朱锦杰;孙奕;姚加佳;沈浩峰;张晓佳4.脑卒中偏瘫Lokohelp机器人阶梯减重下肢康复训练对步行功能的影响 [J], 喻雯;陈金春;李刚;席向朝;胡兴越5.减重步行机器人训练对脑卒中患者步行能力的影响探析 [J],因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CPG是由脊髓中神经元相互联结组成的网络,能发放节律冲动,肌肉的节律性收缩就由低级中枢控制。也有人提出CPG存在于脊髓的腹侧和中部的两侧,它们相互之间存在信号通讯,以脊髓颈和腰膨大处最多,通过神经环路与其他神经关联。当特定感觉传人后,CPG产生步行中屈肌和肌交替转换的神经冲动,首先屈肌兴奋性冲动通过中间神经元抑制伸肌活动,屈肌兴奋完成后伸肌神经兴奋释放,引起伸肌活动,从而在步行动作启动之后,产生自发性屈肌一伸肌交替兴奋,产生迈步动作。
有限元法是结构分析的一种数值计算方法。它在20世纪50年代初期随着计算机的发展应运而生。最早应用于结构力学,后来随着计算机的发展慢慢用于流体力学的数值模拟。有限元分析的基本概念是用较简单的问题代替复杂问题后再求解。它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的近似解,然后推导求解这个域的满足条件,从而得到问题的解。这个解不是准确解,而是近似解,因为实际问题被较简单的问题所代替。由于大多数实际问题难以得到准确解,而有限元不仅计算精度高,而且能适应各种复杂形状,因而成为行之有效的工程分析手段。
内容:
随着社会的发展,人类文明的不断进步,人们的生活质量也越来越好,但是,人们也不得不面临越来越多的疾病困扰。最为显著的是下肢功能障。众所周知,步行是人们日常生活中最基本的功能活动之一,但是下肢功能障碍使得患者丧失这一基本功能,给生活带来了极大的不便,在加重了患者本身的不便的同时也给患者的家庭加重了负担,据统计,患有致残的神经系统疾病的患者如脑卒中、脊髓损伤、外伤、格林-巴利等病后,3年能恢复独立行走50m的患者仅有3%—10%。对许多因各种原因导致暂时不能行走的患者来说,恢复步行这一基本功能是他们的第一愿望,这也是康复医学研究的一个主要内容。减重步行训练是针对下肢功能障碍,改善步行能力的一种新的康复治疗技术。
传统步行运动治疗强调诱发下肢关节分离运动,单独训练迈步、平衡、重心转移等分解动作。但真实步行环境与此不同,结果常导致患者分离运动好,步行能力差的矛盾现象。减重步行训练(BWSTT)强调在真实步行环境中进行综合性训练,注重实用性,增加安全性,减少能量消耗,扩大活动范围,提高生活质量。自上世纪80年代始,BWSTT开始临床应用于脑卒中及脊髓损伤患者。患者下肢无充分负重能力时即可开始BWSTT,而无需等训练到能步行后才进行传统步态训练,这显然符合脑卒中早期康复理念。因此开始在脑卒中临床方面开始应用。
近年来,减重步行训练在国内得到广泛的应用。但是减重步行训练在国内所涉及的病种尚不够深入.使用时需多名治疗师参与治疗。人力投入相对较大.限制了它在临床工作中的使用。尽管有关减重步行训练的研究报道较多,但缺乏大样本。多中心对照研究,对开始减重的时机、减重量、平板运动速度、持续间歇时间、疗程等方面。各家报道不一,还有待进一步循证优化。以确定最佳训练方案。
现代减重步行训练起源于上世纪80年代脊髓损伤的猫动物模型的步行训练。目前较为认可的理论是“中枢模式发生器”(Central pattern generator,CPG)学说。1985年Finch等.在电动跑台上对脊髓横断猫后腿减重后被动迈步的试验中,发现经过一段时间的训练.可使猫重新获得运动能力:并在进一步研究中发现.其运动能力的恢复与脊髓非完全损伤尚存在特定节段感觉输入机制有关。这种踏板运动有赖于特定的节段感觉传人,类似于人类腰骶运动区的中枢模式发生器.
躯干和下肢承重能力下降是导致步行不能的重要原因。传统康复治疗已经采用减重的方式进行早期步行训练,例如利用水的浮力进行水中步行,利用各类拐杖或者步行器减少下肢负重等。但都是存在一些不足,例如在水中运动需要特殊环境,拐杖或者助行器需要患者增加上肢用力,造成步行时身体姿态异常。减重训练是以传统实践为依据,利用悬吊装置不同程度地减少上身体重对下肢的负荷,在理论上有利于支撑能力不足的患者早期进行各种步行训练。目前减重训练已经开始临床应用研究。
减重步行练系统由两部分组成,即减重装置(PBWS)和电动活动平板(tread mill)。减重装置(电动)主要包括固定支撑架、减重控制台、电动升降杆、减重吊带。减重控制台控制电动升降杆的升降,随着升降杆的升高,患者被逐渐向上吊起.下肢负重减少.减少的重量可以在减重控制台上显示出来。治疗师可以按需要从下肢O%(完全负重)一100%(完全不负重)调整下肢减重量。目前,初始的减重量大多采用减掉患者身体质量的30%一加%,也有减重60%的报道。训练前需满足两个条件:①患者负重达到可能支撑的最大体重;(函患者髋关节能够完全伸展。一旦进步,尽快减少减重量.直至达到全负重.但必须保证正确的步态模式及安全性。减重吊带类似于降落伞固定带,使用时需紧紧缚于患者的腰臀部.固定带的两端对称固定在悬吊支撑架上。活动平板(电动)用于减重患者的步行训练.平板运行时间、速度和坡度可以根据需要进行调节.一般初始速度设定为0.1-0.5m/s。每次步行训练30--40min.采取间歇训练法,间歇频率及时间因人而异,主要根据患者的耐受程度和疲劳恢复情况。由治疗师具体掌握,以后根据患者恢复情况逐步减少间歇次数、间歇时间,增加平板运动速度。
研究生课程(论文类)试题
2014/2015学年第1学期
课程名称:生物力学
课程代码:19000011
论文题目:气囊减重步行训练有限元分析
学生姓名:
专业﹑学号:生物医学工程
学院:医疗器械与食品学院
字:
日期:年月日
课程(论文)题目:气囊减重步行训练有限元分析