实验报告格式-蓄水池水位控制
水池蓄水试验方案
水池蓄水试验方案水池蓄水试验方案编制依据《地基与基础工程施工及验收规范》GB50202—20__ 《混凝土结构工程施工及验收规范》GB50204—20__ 《地下防水结构工程施工验收规范》GB50208-20__ 《地下工程防水技术规范》GBJ108-87 《砼外加剂应用技术规范》GB50119-20__ 《建筑安装工程质量检验评定统一标准》GB50300—20__ 《建筑工程质量检验评定标准》GBJ301—88 《给水排水工程施工验收规范》GB50268-97 《给水排水构筑物施工验收规范》GBJ141-90 其它有关规范资料及以往施工经验。
工程概况 _____工程由____设计。
蓄水池设计为48×48m(长×宽)满水量均为10000立方米设计水深4.4m。
水池土方尚未回填水池基底外露-5.9m坐落在设计的细砂持力层上地基承载力≥150Kpa。
设计水池的混凝土强度为C30抗渗等级为≥S8 。
水池为现浇钢筋混凝土结构于06年8月结构施工完毕。
试验项目根据有关规范水池应做满水试验。
水池试水前的准备工作试水前检查工作 1、池体结构的混凝土抗压强度、抗渗标号均达到设计要求。
2、水池结构外观检查试水前应先对池体进行外观检查检查池体有无裂缝如有较大开裂等情况发生应经设计等有关部门鉴定后再作处理检查蜂窝麻面情况。
3、池体混凝土的缺陷修补局部蜂窝、麻面、局部混凝土流浆、螺栓孔、预埋钢筋等等需在灌水试验前修补处理完毕。
4、池内预留口的处理池内各个进出水预留口用MU10普通粘土砖、M7.5防水砂浆砌筑用1:1防水砂浆内外抹灰(刚性五层做法)不得渗漏。
没有安装的预留孔采用6厚钢板满焊封闭或采用红砖防水砂浆封堵不得漏水。
所有封堵的预留孔满水试验完毕后应拆除并清理干净。
水池封闭前应将池内的杂物清理干净。
水池四周应设置照明措施。
5、在水池进人维修口处设置水位观测标尺、用明显的标记标定水池的各试水标高及最高水位。
实验五水塔水位自动控制
实验五水塔水位自动控制
一、实验目的
1.掌握边沿脉冲指令的应用
2.熟悉常用特殊继电器的应用。
3.进一步掌握编程软件的使用方法和调试程序的方法。
二、实验内容
1.系统组成
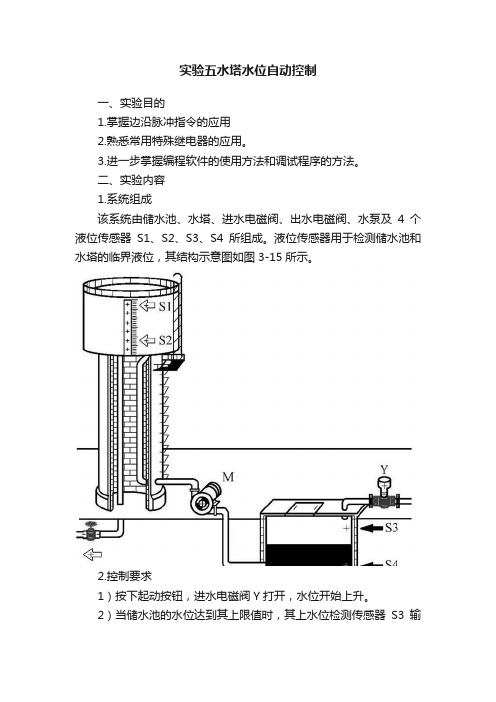
该系统由储水池、水塔、进水电磁阀、出水电磁阀、水泵及4个液位传感器S1、S2、S3、S4所组成。
液位传感器用于检测储水池和水塔的临界液位,其结构示意图如图3-15所示。
2.控制要求
1)按下起动按钮,进水电磁阀Y打开,水位开始上升。
2)当储水池的水位达到其上限值时,其上水位检测传感器S3输
出信号,进水电磁阀Y关闭,水位停止上升。
3)当水位到达S3后,水泵M开始动作,将储水池的水传送到水塔中去。
4)当水塔的水位达到其上限值时,其上水位检测传感器S1输出信号,水泵M停止抽水。
5)水塔的出水电磁阀根据用户用水量的大小可通过旋钮进行调节,当水塔的水位下降到其下水位时,其下水位检测传感器S2停止输出信号,水泵会再次打开。
为了保证水塔的水量,储水池会在其水位处于下限值(液位传感器S4没有信号)时,自动打开进水电磁阀Y。
3.系统接线示意图
PLC对外接线图如图3-16所示。
4.实验参考程序
实验参考程序如图3-17所示。
三、实验报告要求1.给程序加上注释,说明每一个点位的作用。
2.思考并回答控制用户用水量的旋钮是什么原理。
单容水箱液位过程控制实验报告范文

单容水箱液位过程控制实验报告范文一、实验目的1、了解单容水箱液位控制系统的结构与组成。
2、掌握单容水箱液位控制系统调节器参数的整定方法。
3、研究调节器相关参数的变化对系统静、动态性能的影响。
4、了解PID调节器对液位、水压控制的作用。
本实验采用计算机PID算法控制。
首先由差压传感器检测出水箱水位,水位实际值通过A/D转换,变成数字信号后,被输入计算机中,最后,在计算机中,根据水位给定值与实际输出值之差,利用PID程序算法得到输出值,再将输出值经过D/A模块转换成模拟信号,进而控制电机转速,从而形成一个闭环系统,实现水位的计算机自动控制。
2.2被控对象本实验是单容水箱的液位控制。
被控对象为图1中的上水箱,控制量为流入水箱的流量,执行机构为调节阀。
由图1所示可以知道,单容水箱的流量特性:水箱的出水量与水压有关,而水压又与水位高度近乎成正比。
这样,当水箱水位升高时,其出水量也在不断增大。
所以,若阀V6开度适当,在不溢出的情况下,当水箱的进水量恒定不变时,水位的上升速度将逐渐变慢,最终达到平衡。
由此可见,单容水箱系统是一个自衡系统。
三、电动调节阀流量特性物理模型电动调节阀包括执行机构和阀两个部分,它是过程控制系统中的一个重要环节。
电动调节阀接受调节器输出4~20mADC的信号,并将其转换为相应输出轴的角位移,以改变阀节流面积S的大小。
图2为电动调节阀与管道的连接图。
图2图中:u----来自调节器的控制信号(4~20mADC)θ----阀的相对开度----阀的截流面积q----液体的流量由过程控制仪表的原理可知,阀的开度θ与控制信号的静态关系是线性的,而开度θ与流量Q的关系是非线性的。
四、单容水箱系统PID控制规律及整定方法数字PID控制是在实验研究和生产过程中采用最普遍的一种控制方法,在液位控制系统中也有着极其重要的控制作用。
本章主要介绍PID控制的基本原理,液位控制系统中用到的数字PID控制算法及其具体应用。
水位控制实验报告

水位控制实验报告
本实验报告旨在检查一种水位控制系统在不同使用条件下的性能特性。
特别是,我们考虑该系统在瞬变流量和变化的水位条件下的反应,以及通过特定控制策略以及特定参数化模型的模拟。
实验设置采用常用的工业模拟系统,使用无线压力传感器和水箱模型来模拟水箱动态水位行为,采用PID控制系统来控制水箱水位,最后采用MATLAB Simulink搭建的模拟系统能够实现系统的动态特性。
实验期间,实验系统进行了多组控制策略,具体而言,我们发现PID控制系统在瞬变流量和变化水位条件下很好地实现了水位控制,此外,采用模型参考控制,包括先验和后验控制,均可实现水位精度控制,并且在控制响应方面胜过PID系统。
通过本次实验,可以看出,水位控制系统在多种使用条件下均能够有效地实现水位控制,其中最佳的控制方案是采用模型参考控制,这些结果有助于我们更好地认识水位控制系统的行为,并为针对工业应用提供有效参考。
蓄水试验记录范文
蓄水试验记录范文日期:2024年10月20日试验地点:XX水库试验时间:上午9点-下午5点试验前准备:1.检查试验设备和仪器是否完好,包括水泵、流量计、液位计等;2.清理试验区域,确保没有杂物和障碍物;3.确认试验方案,包括试验时段、抽水流量等参数。
试验步骤:1.搭建试验设备:将水泵放置在水源附近,连接输水管道,确保流量计和液位计的准确测量;2.开启水泵:按照试验方案设定,逐渐加大水泵的抽水流量,记录每次调节的流量数值;3.测量液位:在水库的不同位置标示高度,并使用液位计实时测量液位高度;4.持续记录数据:每隔一段时间,记录一次水泵的抽水流量和水库的液位高度,保证数据的准确性;5.持续观察水库情况:观察水库的漫溢情况、孔洞是否出现渗漏等情况;6.试验结束:根据试验方案的要求,试验结束时关闭水泵,并记录末次的抽水流量和水库液位高度。
试验结果:根据试验的数据记录,我们得到以下结果:-在试验过程中,抽水流量逐渐增大。
由于试验方案的限制,我们最大抽水流量为300立方米/小时;-水库液位在试验过程中逐渐升高,最终达到了设定的目标水位;-水库出现了少量的漫溢情况,这说明水库容量仍然有一定的储备能力;-试验过程中没有发现孔洞渗漏等异常情况。
分析与讨论:通过本次试验,我们对于XX水库的蓄水性能进行了初步的评估。
根据试验结果,水库具有一定的蓄水能力,并且在最大抽水流量下,能够达到设定的目标水位。
然而,在试验过程中出现了少量的漫溢情况,这可能是由于水库进水量超过了蓄水能力所致。
因此,建议在实际运行中,适当控制抽水流量,以避免水库的漫溢现象。
另外,在试验过程中没有发现孔洞渗漏等异常情况,这显示了水库的结构和密封性较好。
然而,在实际运行中,需要定期检查水库的设施和设备,以确保其完好,避免潜在的渗漏风险。
总结:本次试验通过对XX水库的蓄水性能进行了评估,结果显示水库具有一定的蓄水能力并且结构较为牢固。
然而,在实际运行中,需要注意控制抽水流量,以避免漫溢现象的发生,并定期检查设施和设备的情况。
过程控制实验(液位控制)

对比 5、6、7 组实验数据,没有明显看出积分控制作用对系统性能的影响。 书本上说微分是按偏差的变化控制的,能够提高系统的稳定性,抑制超调。
0.00
2.50
相对误差(%)
0
0
5
7.5
10
5.01
7.52
10.03
0.2
0.27
0.3
四、思考题 1、用传感器测量过程变量的准确性如何?如果有误差,可以采取什么方法进行
修正? 答:用传感器测量过程变量中,液位测量的数值误差较大;流量传感器的测量值 由于没有理论值相比较,所以不知道传感器的测量准确性如何;温度传感器 的 测量结果与实际温度相差不大。用 PCL-812PG 板卡的 D/A 口向比例阀输出的控 制电压值与实际测量的误差很小。
在静态时, Qi
QO
,
dh dt
0 ,当 Qi
变化时, h 、 QO
也将发生变化,由
流体力学可知,流体在紊流情况下, h 与流量之间为非线性关系,为简化起
见,作线性化处理。近似认为 QO 与 h 在工作点附近成正比,而与出水阀的阻
力 R2 (称为液阻)成反比,即
h QO R2
或
h R2 Q0
②
液位设定值 —
液位调节器
流量阀
水箱
实际液位值
液位检测变送器
3、根据液位对象的数学模型,选择系统的采样周期
TS 0.5s 4、运用经验法确定数字调节器的参数
实验次数
调节器参数
KC
水箱水位控制实验报告
水箱水位控制实验报告实验名称:水箱水位控制实验实验目的:1. 理解并掌握水位控制的基本原理;2. 学习并掌握PID控制器的原理和应用;3. 进一步培养分析和解决问题的能力。
实验原理:水箱水位控制是典型的反馈控制系统,它的基本原理是根据传感器检测到的水位信号,通过控制阀门的开度来调节进水和排水的流量,从而实现控制水箱水位的目的。
PID(Proportional-Integral-Derivative)控制器是一种常用的控制器,它能根据给定的目标值和当前的反馈信号,通过比例、积分和微分三个控制参数来实现对系统的精确控制。
实验步骤:1. 搭建水箱水位控制实验装置,包括水箱、加水阀门、排水阀门、水位传感器和PID控制器等;2. 使用水位传感器对水箱的水位进行实时检测,并将检测到的信号传输给PID 控制器;3. 设置PID控制器的参数,并设定所需的水位目标值;4. PID控制器根据当前的水位反馈信号,通过计算得出相应的控制信号,进而调节阀门的开度;5. 根据控制信号的变化,调整阀门的开度,从而控制进水和排水的流量,以达到控制水箱水位的目的;6. 不断监测水箱水位的变化,对PID控制器的参数进行调整,优化控制系统的性能;7. 记录实验数据,并分析实验结果。
实验结果与分析:通过实验,我们可以得到一系列的实验数据,包括水箱水位和时间的变化关系、阀门开度和时间的变化关系等。
根据这些数据,我们可以对系统进行分析和优化。
在实验过程中,我们可以观察到如下现象:1. 当PID控制器的参数设置不合理时,系统的水位控制效果不佳,水位波动较大;2. 通过合理调整PID控制器的参数,可以减小水位波动,使得水位能够在较短的时间内达到稳定状态;3. 在某些情况下,系统的响应时间会较长,此时需要进一步优化PID控制器的参数;4. 可以通过改变目标水位值,观察系统的响应特性,进一步研究系统的稳定性和灵敏度。
实验结论:通过本实验,我们深入了解了水箱水位控制的基本原理和PID控制器的原理与应用。
水箱控制实验报告

水箱控制实验报告组员:尹舰 PB14210216 韦应栋 PB14210220 曾开文 PB14210233 一、实验目的与要求:通过本实验,使学生对实际控制系统的结构、系统中各环节的关系、数字控制器的应用和控制系统的整定等建立完整概念。
培养利用所学理论知识分析、解决实际问题的能力。
1、了解单容水箱水位控制系统的实际结构及各环节之间的关系2、分别利用PID控制器、大林控制器、Smith控制器和自行设计的卡尔曼控制器实现对水箱水位的控制3、分析并比较不同控制器之间的特点二、实验内容:1、实验建模:先利用设备测出阶跃响应曲线,然后再在此基础上利用试探法,选择一阶惯性环节确定其参数。
测得的阶跃响应曲线如下:K=y(~)/u=4.33,T对应0.63倍峰值为78故建模结果为y=4.33/(78s+1)2、PID控制器设计此处采用微分先行PID控制算法进行控制器的设计微分先行PID控制算法:PID参数整定:采用扩充响应曲线法:由实验所得被控对象的阶跃响应曲线,取控制度1.05,得到第一组PID参数KP=4.7438KI=0.1186KD=42.6837得到闭环阶跃响应将控制度改为1.2,同样利用扩充响应曲线法,得到第二组PID参数:KP=4.125KI=0.147KD=14.18对应的闭环阶跃响应:再次调整PID参数,使系统的调节时间和超调量更优,此处调整KD 为20,得到最终的PID参数KP=4.125KI=0.147KD=20对应的闭环阶跃响应:●实验结论:实验结果分析:实验中首先选取控制度为1.05,得到的响应曲线具有较好的性能,在增大控制度为1.2后,可见系统的调节时间、超调量和稳态误差都有所增大,性能变差,与理论分析结果一致,最后通过对Kd的进一步调节,减少了系统的调节时间,得到了更好的系统性能。
Kp、Ti、Td的作用:Kp为比例增益,能减小误差,但不能消除稳态误差,但Kp增大会引起系统不稳定;Ti为积分时间常数,只要有足够的时间,积分控制将能完全消除误差但积分作用太强会使系统超调增大,甚至使系统出现振荡;Td为微分时间常数,可以减少调节时间,改变系统的动态性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国计量学院现代科技学院
实 验 报 告
实验课程: 计算机控制技术 实验名称: 蓄水池水位控制
班 级: 学 号: 姓 名: 实验日期:
一、实验目的
1. 通过对工程实例的模拟,了解bang-bang 控制器的工作原理
2. 一步熟悉PLC 的应用,以及bang-bang 控制器的实现方法。
3. 熟悉变频器多频段控制的PLC 编程方法。
二、实验内容
参考教材《现代运动控制系统工程》P32~P35页,基于bang-bang 控制器的工作原理,试设计蓄水池水位控制系统的电气控制原理图和逻辑代数方程组、PLC 程序控制图。
以S7-200西门子plc 作为控制器进行设计。
在控制系统原理图中的2个空白点填入相应器件:
三、实验仪器和器材
1. 西门子S7-200 CPU224实验箱一台;
2. 通讯电缆、电源线一根;
3. PC 机及其STEP7-Micro/MIN32调试软件。
实验成绩: 指导教师签名:
给
定
水
位实际水位 用水干扰
四、 实验报告
1.补充绘制蓄水池水位控制系统电气原理图
2. 根据教材35页bang-bang 控制器输出信号控制规则表,设计逻辑代数方程组,说明控
制要点。
具体要求如下。
(1) 基本内容:实现水位由SP1开始,依次实现SP1→SP2→SP3→SP4变化时的变频
器控制;
(2) 选择内容:实现水位由SP4开始,依次实现SP4→SP3→SP2→SP1变化时的变频
器控制。
3. 编制输入输出端子表,设计控制系统PLC 程序,并进行联合调试,提交控制程序和调试
报告。
具体要求如下。
(1) 基本内容:实现水位由SP1开始,依次实现SP1→SP2→SP3→SP4变化时的变频
器控制;
(2) 选择内容1:实现水位由SP4开始,依次实现SP4→SP3→SP2→SP1变化时的变
频器控制。
(3) 选择内容2:实现由水位SP1,SP2,SP3或SP4任意一点开始,自如实现SP4
←→SP3←→SP2←→SP1变化的变频器控制。
4. 分析实验过程中遇到的问题及解决办法,提出对本实验的改进建议及措施。
I0.1 I0.2 I0.3 I0.4 I1.0 I1.1 Q0.0 Q0.1 Q0.2 Q0.3 图1 控制原理图。