Modbus从站编程
MODBUS通讯协议及编程

MODBUS通讯协议及编程ModBus通讯协议分为RTU协议和ASCII协议,我公司的多种仪表都采用ModBus RTU 通讯协议,如:YD2000智能电力监测仪、巡检表、数显表、光柱数显表等。
下面就ModBu s RTU协议简要介绍如下:一、通讯协议(一)、通讯传送方式:通讯传送分为独立的信息头,和发送的编码数据。
以下的通讯传送方式定义也与MO DBUS RTU通讯规约相兼容:初始结构= ≥4字节的时间地址码 = 1 字节功能码 = 1 字节数据区 = N 字节错误校检 = 16位CRC码结束结构= ≥4字节的时间地址码:地址码为通讯传送的第一个字节。
这个字节表明由用户设定地址码的从机将接收由主机发送来的信息。
并且每个从机都有具有唯一的地址码,并且响应回送均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通讯传送的第二个字节。
ModBus通讯规约定义功能号为1到127。
本仪表只利用其中的一部分功能码。
作为主机请求发送,通过功能码告诉从机执行什么动作。
作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。
如果从机发送的功能码的最高位为1(比如功能码大与此同时127),则表明从机没有响应操作或发送出错。
数据区:数据区是根据不同的功能码而不同。
数据区可以是实际数值、设置点、主机发送给从机或从机发送给主机的地址。
CRC码:二字节的错误检测码。
(二)、通讯规约:当通讯命令发送至仪器时,符合相应地址码的设备接通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务;然后把执行结果返送给发送者。
返送的信息中包括地址码、执行动作的功能码、执行动作后结果的数据以及错误校验码。
如果出错就不发送任何信息。
1.信息帧结构地址码:地址码是信息帧的第一字节(8位),从0到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
Modbus 通讯协议编程

Modbus 通讯协议编程协议名称:Modbus 通讯协议编程一、引言Modbus 通讯协议是一种用于工业自动化领域的通信协议,常用于连接不同设备之间的数据交换。
本协议旨在规范Modbus通讯协议的编程实现,确保各种设备之间的数据传输准确、可靠和高效。
二、协议版本本协议基于Modbus通讯协议的最新版本进行编程实现,目前版本为Modbus协议v2.0。
三、通讯方式1. Modbus RTUModbus RTU是一种串行通讯方式,使用二进制编码进行数据传输。
通讯速率可根据实际需求进行配置,常见的包括9600bps、19200bps、38400bps等。
2. Modbus ASCIIModbus ASCII是一种基于ASCII码的串行通讯方式,使用可见字符进行数据传输。
通讯速率可根据实际需求进行配置,常见的包括9600bps、19200bps、38400bps等。
3. Modbus TCP/IPModbus TCP/IP是一种基于以太网的通讯方式,使用TCP/IP协议进行数据传输。
通讯速率可根据实际需求进行配置,常见的包括10Mbps、100Mbps、1000Mbps等。
四、数据格式1. Modbus RTU 数据格式Modbus RTU 数据帧由起始符、地址、功能码、数据、CRC校验码组成。
具体格式如下:起始符:1个字节,固定为0xFF。
地址:1个字节,表示设备地址。
功能码:1个字节,表示读取或者写入数据的功能。
数据:根据功能码的不同,数据长度可变。
CRC校验码:2个字节,用于检验数据帧的完整性。
2. Modbus ASCII 数据格式Modbus ASCII 数据帧由起始符、地址、功能码、数据、LRC校验码组成。
具体格式如下:起始符:1个字符,固定为冒号(:)。
地址:2个字符,表示设备地址。
功能码:2个字符,表示读取或者写入数据的功能。
数据:根据功能码的不同,数据长度可变。
LRC校验码:2个字符,用于检验数据帧的完整性。
Modbus通讯指令使用说明
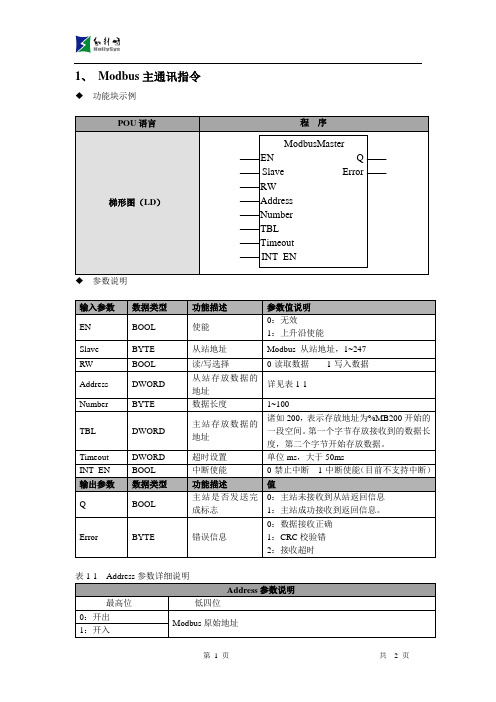
数据类型
功能描述
值
Q
BOOL
主站是否发送完成标志
0:主站未接收到从站返回信息
1:主站成功接收到返回信息。
Error
BYTE
错误信息
0:数据接收正确
1:CRC校验错
2:接收超时
表1-1 Address参数详细说明
Address参数说明
最高位
低四位
0:开出
Modbus原始地址
1:开入
3:模入
4:模出
3、Modbus主站指令能自动进行超时判断和CRC校验检测。
2,端口通信参数设置梯形图(LD)
参数说明
输入参数
数据类型
功能描述
参数值说明
EN
BOOL
使能
0:无效
1:使能
Address
BYTE
本站地址
范围1-247
Port_Type
BYTE
串口类型
1为232,2为485
Baudrate
1、Modbus主通讯指令
功能块示例
POU语言
程序
梯形图(LD)
参数说明
输入参数
数据类型
功能描述
参数值说明
EN
BOOL
使能
0:无效
1:上升沿使能
Slave
BYTE
从站地址
Modbus从站地址,1~247
RW
BOOL
读/写选择
0-读取数据1-写入数据
Address
DWORD
从站存放数据的地址
详见表1-1
诸如:00001,表示Modbus地址为0001的开出点
43050,表示Modbus地址为3050的模出点
Modbus从站协议

Modbus从站协议
Modbus从站协议1.与主站协议相同首先分配存储区地址:
此处不在赘述,参考Mosbus主站协议。
2.进入编程阶段
网络1为Mosbus从站指令的初始化程序,编程时用SM0.1进行
程序初始化;网络1中需注意环节说明:
1):Mode 启动/停止Modbus 1==启动;0==停止;
2):Addr 从站地址;例子为与上位机通讯,因此为PLC的地址。
此为:2 3):MAXIQ 参与通讯的最大I/Q点数,根据实际情况填写S7-200最大默认缺省值为128;
4)MAXAI 参数通讯的最大AI通道数,根据实际情况填写,可为16/32;5)MAXHold 参与通讯的V存储区字,根据需要定义大小;
6)HoldStart 保持寄存器起始地址:以&VBx制定(间接寻址);
说明:此存储区地址不能与Modbus指令分配的地址冲突且在程
序其他位置不能被占用;
网络2不做说明,无需私改;
若上位机需读取数据,遵从以上规范
如果已知S7-200中的V存储区地址,推算Modbus地址的公式如下:
Modbus地址 = 40000 + (T/2+1) ; T为偶数
4 .若需读取V存储区地址,首先将需采集的数据传送到HoldStart 定义的存储
区中在用以上方式访问。
linux c语言编写modbus rtu例程 -回复

linux c语言编写modbus rtu例程-回复如何使用C语言在Linux下编写Modbus RTU例程,以实现数据的读取和写入。
Modbus是一种通信协议,用于在工业自动化系统中实现设备之间的数据通信。
RTU是Modbus协议的一种传输格式,其中数据以二进制形式传输。
在Linux系统中,我们可以使用C语言来编写Modbus RTU例程。
下面将一步一步回答如何实现数据的读取和写入。
第一步:设置串口参数在Linux中,我们可以使用串口来与Modbus设备进行通信。
首先,我们需要设置串口的波特率、数据位、停止位和校验位。
这可以通过C语言中的termios库函数来实现。
c#include <termios.h>int set_serial_port(int fd, int baudrate) {struct termios options;tcgetattr(fd, &options);cfsetispeed(&options, baudrate);cfsetospeed(&options, baudrate);options.c_cflag = (CLOCAL CREAD);options.c_cflag &= ~CSIZE;options.c_cflag = CS8;options.c_cflag &= ~PARENB;options.c_cflag &= ~CSTOPB;options.c_cflag &= ~CRTSCTS;tcsetattr(fd, TCSANOW, &options);}以上代码中,`set_serial_port`函数用于设置串口参数。
`fd`参数为串口文件描述符,`baudrate`参数为波特率。
其中,`cfsetispeed`和`cfsetospeed`函数用于设置输入和输出速度,`CLOCAL`和`CREAD`标志用于使串口工作在本地模式和可读模式,`CS8`标志用于设置8位数据位,`PARENB`标志用于禁用奇偶校验,`CSTOPB`标志用于设置停止位为1位,`CRTSCTS`标志用于禁用硬件流控制。
modbus TCP从站设置

MODBUS TCP/IP从站设置
可以通过MODBUS TCP/IP协议,在局域网内对对触摸屏进行远程的通信与控制。
从站1设置:
一、设置IP
首先使用拨码开关1、3设置触摸屏的IP地址和端口号,该例中设置从站屏的IP地址为:192.168.1.31,端口号为:502。
(具体操作见案例说明“外部拨码开关”部分,端口号要设置为502不能更改)二、建立连接
建立工程后,在下图的位置双击“连接1
弹出“通讯口属性”对话框(如下图示)
在上图所示的对话框中,进行下列设置:
*连接接口:选择为“以太网”(如图所示)
*HMI位置:选择为“本机”(如图所示)
*连接服务:选择为“Mosbus”-“Modbus Slave TCP/IP"
(如图所示)
在弹出的“通讯口属性”对话框点击“参数”,进入下图所示对话框设置IP地址和端口号,设置完成点击“确定”。
三、在画面上做相应的控件
如下图做几个“数值输入与显示”的控件。
做完上述设置,将程序下载到屏内,将主从站连接到路由器或者直接连接,进行监视和控制操作。
从站2设置、从站3设置:
按照从站1的设置方式,分别设置从站2的IP地址为
192.168.1.30,从站3的IP地址为192.168.1.200.并做对应控件
注:1、屏做从站时使用的地址为屏的内部地址。
2、端口号设置为502。
modbus java 程序
modbus java 程序Modbus是一种通信协议,广泛应用于工业自动化领域。
它允许电子设备(如传感器、执行器和PLC等)通过串行通信或以太网进行通信,以实现数据的读取和控制。
Java作为一种通用的编程语言,也可以用于编写Modbus程序。
在Java中,有多种库可供开发人员使用,以便于实现Modbus通信功能。
本文将介绍如何使用Java编写Modbus程序,并提供一些示例代码。
首先,为了使用Modbus库,我们需要添加相应的依赖项。
一个受欢迎的Java Modbus库是jamod,你可以在Maven或Gradle配置文件中添加以下依赖项:```xml<dependency><groupId>net.wimpi</groupId><artifactId>jamod</artifactId><version>2.0.0</version></dependency>```接下来,我们需要创建一个Modbus主站(Master)或从站(Slave)的实例。
在Java中,可以使用ModbusMaster和ModbusSlave类来实现。
下面是一个使用jamod库创建Modbus主站的示例代码:```javaimport net.wimpi.modbus.Modbus;import net.wimpi.modbus.io.ModbusTCPTransaction;import net.wimpi.modbus.msg.ReadMultipleRegistersRequest;import net.wimpi.modbus.msg.ReadMultipleRegistersResponse;import .TCPMasterConnection;import .InetAddress;public class ModbusMasterExample {public static void main(String[] args) {try {// 创建TCPMasterConnection实例TCPMasterConnection connection = new TCPMasterConnection(InetAddress.getLocalHost());connection.setPort(502);connection.connect();// 创建ModbusTCPTransaction实例ModbusTCPTransaction transaction = new ModbusTCPTransaction(connection);// 创建ReadMultipleRegistersRequest实例ReadMultipleRegistersRequest request = new ReadMultipleRegistersRequest(0, 10);// 执行Modbus请求transaction.setRequest(request);transaction.execute();// 获取响应ReadMultipleRegistersResponse response = (ReadMultipleRegistersResponse) transaction.getResponse();// 处理响应数据if (response != null) {int[] values = response.getRegisterValues();for (int value : values) {System.out.println("Value: " + value);}}// 关闭连接connection.close();} catch (Exception e) {e.printStackTrace();}}}```在以上示例代码中,我们首先创建了一个TCPMasterConnection实例,并指定Modbus设备的IP地址和端口。
MODBUS通讯协议及编程

MODBUS通讯协议及编程ModBus通讯协议分为RTU协议和ASCII协议,我公司的多种仪表都采用ModBus RTU 通讯协议,如:YD2000智能电力监测仪、巡检表、数显表、光柱数显表等。
下面就ModBu s RTU协议简要介绍如下:一、通讯协议(一)、通讯传送方式:通讯传送分为独立的信息头,和发送的编码数据。
以下的通讯传送方式定义也与MO DBUS RTU通讯规约相兼容:初始结构 = ≥4字节的时间地址码 = 1 字节功能码 = 1 字节数据区 = N 字节错误校检 = 16位CRC码结束结构 = ≥4字节的时间地址码:地址码为通讯传送的第一个字节。
这个字节表明由用户设定地址码的从机将接收由主机发送来的信息。
并且每个从机都有具有唯一的地址码,并且响应回送均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通讯传送的第二个字节。
ModBus通讯规约定义功能号为1到127。
本仪表只利用其中的一部分功能码。
作为主机请求发送,通过功能码告诉从机执行什么动作。
作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。
如果从机发送的功能码的最高位为1(比如功能码大与此同时127),则表明从机没有响应操作或发送出错。
数据区:数据区是根据不同的功能码而不同。
数据区可以是实际数值、设置点、主机发送给从机或从机发送给主机的地址。
CRC码:二字节的错误检测码。
(二)、通讯规约:当通讯命令发送至仪器时,符合相应地址码的设备接通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务;然后把执行结果返送给发送者。
返送的信息中包括地址码、执行动作的功能码、执行动作后结果的数据以及错误校验码。
如果出错就不发送任何信息。
1.信息帧结构地址码:地址码是信息帧的第一字节(8位),从0到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
功能编程
从站功能编程
Modbus RTU从站
1、编程时使用SM0.1调用子程序MBUS_INIT进行初始化,使用SM0.0调用MBUS_SLAVE,并指定相应参数。
关于参数的详细说明,可在子程序的局部变量表中找到
图中参数意义如下:
1模式选择:启动/停止Modbus,1=启动;0=停止
2从站地址:Modbus从站地址,取值1~247
3波特率:可选1200,2400,4800,9600,19200,38400,57600,115200
4奇偶校验:0=无校验;1=奇校验;2=偶校验
5延时:附加字符间延时,缺省值为0
6最大I/Q位:参与通信的最大I/O点数,S7-200的I/O映像区为128/128,缺省值为128
7最大AI字数:参与通信的最大AI通道数,可为16或32
8最大保持寄存器区:参与通信的V存储区字(VW)
9保持寄存器区起始地址:以&VBx指定(间接寻址方式)
10初始化完成标志:成功初始化后置1
11初始化错误代码
12Modbus执行:通信中时置1,无Modbus通信活动时为0。
13错误代码:0=无错误
注意:
由子程序参数HoldStart和MaxHold指定的保持寄存器区,是在S7-200CPU的V数据存储区中分配,此数据区不能和库指令数据区有任何重叠,否则在运行时会产生错误,不能正常通信。
注意Modbus中的保持寄存器区按“字”寻址,即MaxHold规定的是VW而不是VB的个数。
在图2的例子中,规定了Modbus保持寄存器区从VB0开始(HoldStart=VB0),并且保持寄存器为1000个字(MaxHold=1000),因保持寄存器以字(两个字节)为单位,实际上这个通信缓冲区占用了VB0~VB1999共2000个字节。
因此分配库指令保留数据区时至少要从VB2000开始。
当然保持区不一定要从VB0开始。
注意:
你选用的CPU的V存储区大小!CPU型号不同V数据存储区大小不同。
应根据需要选择Modbus 保持寄存器区域的大小。
包含Modbus RTU从站指令库的项目编译、下载到CPU中后,在编程计算机(PG/PC)上运行一些Modbus测试软件可以检验S7-200的Modbus RTU通信是否正常,这对查找故障点很有用。
测试软件通过计算机串口(RS-232)和PC/PPI电缆连接CPU。
如果必要,须将PC/PPI 电缆设置在自由口通信方式。
Modbus RTU从站地址与S7-200的地址对应
Modbus地址总是以00001、30004之类的形式出现。
S7-200内部的数据存储区与Modbus的0、1、3、4共4类地址的对应关系如下:
表1.Modbus地址对应表
Modbus地址S7-200数据区
00001~00128Q0.0~Q15.7
10001~10128I0.0~I15.7
30001~30032AIW0~AIW62
40001~4xxxx T~T+2*(xxxx -1)
其中T为S7-200中的缓冲区起始地址,即HoldStart。
如果已知S7-200中的V存储区地址,推算Modbus地址的公式如下:
Modbus地址=40000+(T/2+1);T为偶数
Modbus RTU从站指令库支持的Modbus功能码
Modbus RTU从站指令库支持特定的Modbus功能。
访问使用此指令库的主站必须遵循这个指令库的要求。
表 2.Modbus RTU从站功能码
功能
码
主站使用相应功能码作用于此从站的效用
1读取单个/多个线圈(离散量输出点)状态。
功能1返回任意个数输出点(Q)的ON/OFF状态。
2读取单个/多个触点(离散量输入点)状态。
功能2返回任意个数输入点(I)的ON/OFF状态。
3读取单个/多个保持寄存器。
功能3返回V存储区的内容。
在Modbus协议下保持寄存器都是“字”值,在一次请求中可以读取最多120个字的数据。
4读取单个/多个输入寄存器。
功能4返回S7-200的模拟量数据值。
5写单个线圈(离散量输出点)。
功能5用于将离散量输出点设置为指定的值。
这个点不是被强制的,用户程序可以覆盖Modbus通信请求写入的值。
6写单个保持寄存器。
功能6写一个值到S7-200的V存储区的保持寄存器中。
15写多个线圈(离散量输出点)。
功能15把多个离散量输出点的值写到S7-200的输出映像寄存器(Q区)。
输出点的地址必须以字节边界起始(如Q0.0或Q2.0),并且输出点的数目必须是8的整数倍。
这是此Modbus RTU从站指令库的限制。
些点不是被强制的,用户程序可以覆盖Modbus通信请求写入的值。
16些多个保持寄存器。
功能16写多个值到S7-200的V存储区的保持寄存器中。
在一次请求中可以写最多120个字的数据。