滑块机构的分类方法及其运动特性分析
《曲柄滑块机构》教学设计公开课教案教学设计

《曲柄滑块机构》教学设计公开课教案教学设计一、教学目标1. 了解曲柄滑块机构的组成、工作原理和特点。
2. 掌握曲柄滑块机构在实际工程中的应用。
3. 培养学生的动手操作能力和团队协作精神。
二、教学内容1. 曲柄滑块机构的组成及其各部分的作用。
2. 曲柄滑块机构的工作原理及运动特性。
3. 曲柄滑块机构的应用案例分析。
4. 曲柄滑块机构的绘制与设计方法。
三、教学过程1. 导入:通过展示实际应用场景,引发学生对曲柄滑块机构的兴趣。
2. 理论讲解:介绍曲柄滑块机构的组成、工作原理和特点。
3. 案例分析:分析曲柄滑块机构在实际工程中的应用案例。
4. 动手实践:学生分组进行曲柄滑块机构的绘制和设计。
5. 总结与反馈:对学生的实践成果进行点评,解答学生的疑问。
四、教学方法1. 讲授法:讲解曲柄滑块机构的理论知识。
2. 案例分析法:分析曲柄滑块机构在实际工程中的应用。
3. 动手实践法:培养学生实际操作能力和团队协作精神。
4. 总结反馈法:对学生的学习成果进行点评和指导。
五、教学资源1. 教材:曲柄滑块机构相关章节。
2. 课件:曲柄滑块机构的工作原理、应用案例等。
3. 模型:曲柄滑块机构的实体模型或三维模型。
4. 绘图软件:如AutoCAD等,用于学生进行曲柄滑块机构的绘制和设计。
六、教学评价1. 评价学生对曲柄滑块机构理论知识的理解程度。
2. 评价学生对曲柄滑块机构实际应用案例的分析能力。
3. 评价学生的动手操作能力和团队协作精神。
4. 评价学生运用绘图软件进行曲柄滑块机构设计和绘制的技能水平。
七、教学难点1. 曲柄滑块机构运动特性的理解和分析。
2. 实际工程应用中曲柄滑块机构的选型和设计。
3. 利用绘图软件进行曲柄滑块机构设计和绘制的技巧。
八、教学准备1. 准备曲柄滑块机构的教材和参考资料。
2. 制作详细的课件和教学视频。
3. 准备实体模型或三维模型,以便进行直观展示。
4. 确保每组学生都有足够的绘图软件和计算机设备。
曲柄滑块机构的结构
• 闭式机身有整体式和组合式两种.闭式机身承 载能力大,刚度较好.所以,从小型精密压力机到 超大型压力机大都采用这种形式.
• 组合式〔见图b〕机身是用拉紧螺栓将上梁、 立柱和底座拉紧,紧固成为一体的,加工和运输 比较方便,大中型压力机应用较广.
• 整体式机身〔见图a〕,有时为了增强刚性也 有使用拉紧螺栓的.虽然整体式机身加工装配 工作量较小,但需要大型加工设备,运输也较困 难.因此,一般被限制在3000kN以下的压 力机上应用.
轴式的曲柄滑块机构在大型压力机上 的应用受到限制.
• 曲拐轴式曲柄滑块机构便 于实现可调行程且结构较 简单,但由于曲柄悬伸,受 力情况较差,因此主要在中、 小型机械压力机上应用.
• 偏心齿轮工作时只传递扭矩,弯矩 由芯轴承受,因此偏心齿轮的受力 比曲轴简单些,芯轴只承受弯矩,受 力情况也比曲轴好,且刚度较大.此 外,偏心齿轮的铸造比曲轴锻造容 易解决,但总体结构相对复杂些.所 以,偏心齿轮驱动的曲柄及滑块机 构常用于大中型压力机.
• 开式机身压力机的弹性变形、机身的角变 形使滑块下平面与垫板〔或工作台〕上平 面的平行度下降,引起模具的导柱导套和滑 块导轨过热,严重磨损,使加工出的零件精度 降低,尤其对压印加工或整形加工,这种不良 影响可以说是致命的缺陷,如后图a所示.
• 另外,角变形造成滑块的上下运动与工作 台〔或垫板〕上平面的垂直度的降低,将 使冲头和凹模倾斜一角度,促使模具间隙 不均匀,并产生水平方向的侧压力,不仅影 响冲压件的尺寸精度,而且还会加速模具 的磨损甚至使冲头折断,特别是对薄板冲 压加工工艺影响尤其严重,如后图b、c 所示.
• 压力机的工作台、垫板及滑块,在负荷状态下,如果 出现如下图所示那样的挠度,平面度就会被严重破 坏,尤其在双动或双点压力机中,这一点特别明显.
调模机构的类型及工作原理
调模机构的类型及工作原理
调模机构根据其工作原理可以分为以下几种类型:
1. 滑块式调模机构:该机构通过上下滑动的滑块来实现模具的开闭动作。
通常由滑块、导向柱、导向套、模块座、模块底座等组成。
2. 曲柄摇杆式调模机构:该机构通过曲柄摇杆的运动来传递力量,实现模具的开闭动作。
通常由曲柄、连杆、摇杆、导向柱、导向套等组成。
3. 液压调模机构:该机构通过液压缸的工作原理来实现模具的开闭动作。
通过液压油的压力控制液压缸的运动,使模具开合。
4. 气动调模机构:该机构通过气动缸的工作原理来实现模具的开闭动作。
通过气压的控制控制气动缸的运动,使模具开合。
5. 伺服调模机构:该机构通过伺服电机的工作原理来实现模具的开闭动作。
通过控制伺服电机的旋转角度和速度,使模具开合。
这些调模机构的工作原理各不相同,但都有一个共同的目标,即实现模具的开闭动作,使得产品能够顺利地进行成型加工。
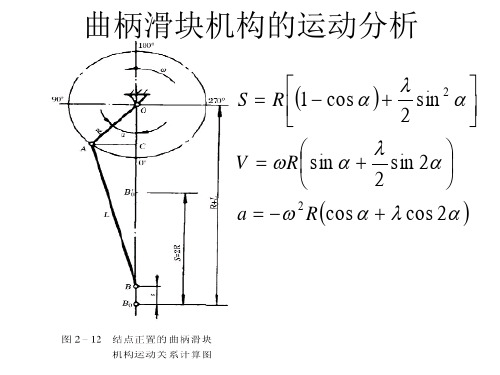
曲柄滑块机构的运动分析及应用精编WORD版

曲柄滑块机构的运动分析及应用精编W O R D版IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆(11071182)陈柯宇 (11071177)熊宇飞(11071174)张保开 (11071183)班级: 1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
偏置曲柄滑块机构课程设计
偏置曲柄滑块机构课程设计一、课程目标知识目标:1. 学生能理解偏置曲柄滑块机构的基本原理与结构,掌握其运动规律及设计要点。
2. 学生能掌握偏置曲柄滑块机构的类型及其在不同应用场景中的优缺点。
3. 学生能运用数学和力学知识分析偏置曲柄滑块机构的运动和受力情况。
技能目标:1. 学生能运用CAD软件绘制偏置曲柄滑块机构的示意图,并进行简单的运动仿真。
2. 学生能根据给定的条件,设计简单的偏置曲柄滑块机构,并分析其运动性能。
3. 学生能通过实验和观察,验证偏置曲柄滑块机构的运动规律和设计原理。
情感态度价值观目标:1. 培养学生对机械设计的兴趣,激发创新意识,提高解决实际问题的能力。
2. 培养学生团队合作精神,学会倾听、交流、协作,提高沟通能力。
3. 培养学生严谨的科学态度,注重实践,养成良好的学习习惯。
本课程针对高年级学生,结合偏置曲柄滑块机构的知识深度,注重理论与实践相结合,旨在提高学生的机械设计能力、动手操作能力和创新能力。
课程目标明确,可衡量,便于教师进行教学设计和评估。
通过本课程的学习,学生将能够掌握偏置曲柄滑块机构的基本知识和技能,为今后的学习和工作打下坚实基础。
二、教学内容本章节教学内容主要包括以下几部分:1. 偏置曲柄滑块机构的基本原理与结构:- 曲柄滑块机构的定义及分类- 偏置曲柄滑块机构的结构特点与工作原理- 教材第二章第一节:曲柄滑块机构的基本概念2. 偏置曲柄滑块机构的运动分析:- 运动规律及运动方程- 偏置距对运动性能的影响- 教材第二章第二节:曲柄滑块机构的运动分析3. 偏置曲柄滑块机构的设计方法:- 设计步骤及要点- 参数选择与优化- 教材第二章第三节:曲柄滑块机构的设计方法4. 偏置曲柄滑块机构的CAD软件应用:- CAD软件的基本操作与绘图技巧- 运动仿真及分析- 教材第二章第四节:曲柄滑块机构的CAD软件应用5. 偏置曲柄滑块机构的实验与观察:- 实验设备与操作方法- 实验数据的收集与分析- 教材第二章第五节:曲柄滑块机构的实验研究教学内容按照以上安排,系统性地介绍了偏置曲柄滑块机构的基本知识、设计方法和实践应用。
《曲柄滑块机构》教学设计公开课教案教学设计
《曲柄滑块机构》教学设计公开课教案教学设计第一章:曲柄滑块机构概述1.1 曲柄滑块机构的定义1.2 曲柄滑块机构的特点1.3 曲柄滑块机构的应用领域第二章:曲柄滑块机构的工作原理2.1 曲柄滑块机构的工作原理简述2.2 曲柄滑块机构的动力传递过程2.3 曲柄滑块机构的运动特性第三章:曲柄滑块机构的参数计算与设计3.1 曲柄滑块机构的主要参数3.2 曲柄滑块机构的参数计算方法3.3 曲柄滑块机构的设计原则与步骤第四章:曲柄滑块机构的优缺点分析4.1 曲柄滑块机构的优点4.2 曲柄滑块机构的缺点4.3 曲柄滑块机构的改进与发展方向第五章:曲柄滑块机构的应用案例分析5.1 曲柄滑块机构在机械设备中的应用案例5.2 曲柄滑块机构在自动化生产线中的应用案例5.3 曲柄滑块机构在其他领域的应用案例第六章:曲柄滑块机构的建模与仿真6.1 曲柄滑块机构的建模方法6.2 曲柄滑块机构的仿真软件介绍6.3 曲柄滑块机构建模与仿真的实践操作第七章:曲柄滑块机构的动态特性分析7.1 曲柄滑块机构的动态特性概述7.2 曲柄滑块机构的动力学建模方法7.3 曲柄滑块机构动态特性的分析与优化第八章:曲柄滑块机构的控制系统设计8.1 曲柄滑块机构控制系统的需求分析8.2 曲柄滑块机构控制系统的硬件选型与设计8.3 曲柄滑块机构控制系统的软件设计与实现第九章:曲柄滑块机构的实验与调试9.1 曲柄滑块机构实验设备与方法9.2 曲柄滑块机构实验过程与数据采集9.3 曲柄滑块机构实验结果分析与调试第十章:曲柄滑块机构的实际应用与前景展望10.1 曲柄滑块机构在工业生产中的应用案例10.2 曲柄滑块机构在科研领域的应用案例10.3 曲柄滑块机构的发展趋势与前景展望重点和难点解析一、曲柄滑块机构概述难点解析:理解曲柄滑块机构的基本概念,掌握其独特的运动特性和在不同领域的应用。
二、曲柄滑块机构的工作原理难点解析:深入理解曲柄滑块机构内部的动力传递和运动转换机制,以及如何实现复杂的运动轨迹。
曲柄滑块机构的运动分析及应用

曲柄滑块机构的运动分析及应用Last revision on 21 December 2020机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆()陈柯宇 ()熊宇飞()张保开 ()班级: 1107172013年6月10日摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块机构的运动特性分析

K n ma i Ch r ce it s A ay i o a k Sl e c a i ie t a a t r i n l s f Cr n i r Me h ns c sc s d m L og u sn
(Coee o ehncla dEet nc,hn o gJazu UnvrW, J a 5 1 1C ia l g fM ca i n lc o i S ad n i h ies l a r n i in 20 0 , hn ) n
分 别 取 实 部 与 虚 部 , 在 b前 加 符 号 系 数 N, 并 得
:
厶c8 1 c s 0 声+ o 2
( 2)
将 上 式 对时 间 求 导 . 有
一
r n0 一 2 s 2 w3 i 3 w2 i n0 s
【 bt c】 m satl rvd sa kn ma c i r o rn l e c ai A s at r rc po ie ie t da a ie i g m fc'k sdrmehns  ̄ i m.Acodn O t s bs h te ta mo e ad gv e c rig t i ,Iet lh te m hma c dl n ie t ai a il h
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
铰链 四 杆 机 构 有 三 种 基 本 类 型 , 曲 柄 摇 杆 机 构 、 曲 既 双 柄 机 构 和 双 摇 杆 机 构 。滑 块 机 构 是 由铰 链 四 杆 机 构 演 化 得 来 的 , 应 地 , 常 按 连 架 杆 固 定 铰 链 中 心 与 滑 块 导 轨 线 的 相 通 距 离 P是 否 等 于 0分 为 对 置 滑 块 机 构 和 偏 置 滑 块 机 构 , 同 时 , 块 机 构 按 连 架 杆 是 否 作 整 周 回转 又 可 分 为 曲 柄 滑 块 滑 机 构 和 摇 杆 滑 块 机 构 , 在 现 有 的 机 械 原 理 教 科 书 及 机 构 但
内摆 动 时 . △AB 及 △ AB ℃” 能 成 立 , 此 时 滑 块 机 构 才 故 为 Ⅱ型 偏 置 摇 杆 滑 块 机 构 , 有 两 种 安 装 形 式 。 并
论 。 文 将 按 照 尺 寸 关 系 对 滑 块 机 构 类 型 进 行 系 统地 划 分 , 本
学 著 作 中 . 着 重 讨 论 曲柄 滑 块 机 构 , 未 对 滑 块 机 构 类 型 只 均
进 行 全 面 地 划 分 . 忽 视 了 对 摇 杆 滑 块 机 构 的 运 动 特 性 讨 且
图 6所 示 , 6 l C 连 架 杆 只 有 在 转。
维普资讯
第 2 1卷 第 4期 20 02正 7月
机 械 科 学 与 技 术
M ECHA I CAL S ENCE AND CI TECHNOL0GY
V o1 1 N O. .2 4
J l uy
2 0 02
文 章 编 号 : 0 — 7 8 2 0 ) 4 0 6 - 2 1 3 8 2 ( 0 2 0 — 5 9 0 0
滑 块 机 构 的 分 类 方 法 及 其 运 动 特 性 分 析
郑 晨 升
( 北 轻工业学 院 , 阳 西 成 728 ) 1 0 1
郑 晨 升
摘 要 : 照 尺 寸 关 系对 滑 块 机 构 进 行 了 全 面 系 统 的 分 类 , 出 了 滑 块 机 构 的 两 种 类 型 和 摇 杆 滑 块 机 构 的 三 种 类 按 提
如 图 3所 示 . f 0且 6 1 连 架 杆 只有 在 转 角 < 当 = < ,
1O的 范 围 内 摆 动 时 . AB C 及 △ A 才 能 成 立 . 此 8。 △ B℃” 故
时 滑块机构 为对 置摇杆滑块 机 构 , 有两 种安装 形式 ; 并 当 ≠ 0 其 中 : 图 4 图 5所 示 . l , 如 、 当 C一 1 < 6 + 1时 . 架 l <f 连 杆 只 有 在 转 角 < 3 0 的 范 围 内 摆 动 时 , AE △ AB 6。 △ C 及 F才能成立 . 此时 滑块机构 为 I 偏 置摇杆 滑块机构 ; 故 型 如
型 . 制 了分 类 线 图 , 分析 了滑 块 机 构 的 安 装 形 式 、 架 杆 运 动 范 围 、 点 住 置 、 块 行 程 、 小 传 动 角等 特 性 。 绘 并 连 死 滑 最
关 键 词 : 块 机 构 ;曲柄 滑 块 机 构 ;摇 杆 滑块 机 构 ;类 型 滑 文献标识码 : A
’’ a s f c t o an o emen lhe CI s i i a i n d M v t Ana y i i r M e ha s s l s s of Slde c ni m
中图分类号 : TH1 2 1
ZH EN G Che s en n— h g ( Nor hwes ns iut ihtI us r X iny g 12 t tI tt e ofL g nd t y, a an 7 081) Ab ta t s r c :Sld i er e ha s s a be l s iid nt t t m c ni m c n c a sfe i o wo ype cr nk— lde m e ha sm s nd o ers i s: a si r c ni a r ck — lder e ha m c — nim s The e ar t o u t e f r nk— lde m e ha s s( gs a d s . e w s b— yp s orc a r si r c nim Fi .1 n 2) a t e ub— yp s( gs nd hr e s t e Fi .3~ 6) f or r c r s i m e ha s , The m o m e c o ke — lde c nim r ve nt har c ers is ofe c s a t itc a h ubt ype ofsl i r e ha s de m c nim i l i g t i t l— nc ud n is ns a l me y ntt pe. t a e f r k m o m e he r ng o oc er ve nt,t p ii n ofd d he osto ea pont,s i r t a e1 nd m i m um drv gl r i lde r v .a ni i e an e a e an l z d. ay e Ke y wor s: i erm e an s ;Cr nk— lde mec anim ; Ro kers i r m e ha s d Sld ch i m a si r h s c — lde c nim