CAN与LIN区别
LIN和CAN车载网络介绍

浅谈车载网络为了在提高性能与控制线束数量之间寻求一种有效的解决途径,在20世纪80年代初,出现了一种基于数据网络的车内信息交互方式——车载网络。
车载网络采取基于串行数据总线体系的结构,最早的车载网络是在UART(Universal Asynchronous Receiver/Transmitter)的基础上建立,如通用汽车的E&C、克莱斯勒的CCD等车载网络都是UART在汽车上的应用实例。
由于汽车具有强大的产业背景,随后车载网络由借助通用微处理器/微控制器集成的通用串行数据总线,逐渐过渡到根据汽车具体情况,在微处理器/微控制器中定制专用串行数据总线。
20世纪90年代中期,为了规范车载网络的研究设计与生产应用,美国汽车工程师协会(SAE)下属的汽车网络委员会按照数据传输速率划分把车载网络分为Class A、Class B、Class C三个级别:Class A的数据速率通常低于20Kbps,如LIN,主要用于车门控制、空调、仪表板;Class B的数据速率为10Kbps~125Kbps,如低速CAN(ISO 11898),主要是事件驱动和周期性的传输;Class C的数据速率为125Kbps~1Mbps,如高速CAN(ISO898),主要用于引擎定时、燃料输送、ABS等需要实时传输的周期性参数。
拥有更高传输速率的MOST和FlexRay主要适用于音视频数据流的传输。
目前与汽车动力、底盘和车身密切相关的车载网络主要有CAN、LIN和FlexRay。
从全球车载网络的应用现状来看,通过20多年的发展,CAN已成为目前全球产业化汽车应用车载网络的主流。
CAN,全称为“Controller Area Network”,即控制器局域网,CAN 数据总线又称为CAN—BUS总线,20世纪80年代初由德国Bosch 公司开发,作为一种由ISO定义的串行通讯总线,其通信介质可以是双绞线、同轴电缆或光导纤维。
汽车电器维修:认知汽车CAN总线、LIN总线、MOST总线的应用及其性能特点

汽车电器基础
CAN总线的特点: ①使用双绞线、同轴电缆以及光纤作为网线,适用 于大数据量短距离通信或者长距离小数据量。
②高速串行数据接口功能:CAN总线支持从几百到 1Mbit/s的数据传输速率,反应速度快,发送时不需 等待令,对请求反应迅速。 ③数据帧短,短数据帧有利于减小延时,提高实时 性,但降低了有效数据传输速率。 ④具有独立性,每个子系统都可以独立工作,某个子系 统出现故障时并不影响其他系统的正常工作。
②单线传输:LIN网络中使用的是非屏蔽的单根导线 联接主、从模块,总线不与诊断仪连接。
③低速传输:LIN网络控制的大多数是舒适系统,对 数据传输速度要求不高,它的传输速率在10Kbit/s 左右,属于A类总线。 ④LIN总线无需仲裁。
汽车电器基础
⑤与CAN总线的橙色不同,
LIN总线主色为紫色。
5
⑥在LIN系统中,加入新节点,不需要 其他从节点作任何软件或硬件的改动。 6
汽车电器基础
学习目标2:认知汽车CAN总线、 LIN总线、MOST总线的应用及其性
能特点
汽车电器基础
8.1.2 总线的应用及其性能特点
1.CAN总线 (1)CAN总线的应用 电子控制器局域网络CAN是德国BOSCH公司提出并推广应用的,它是 专门为车辆系设计的,来为汽车的控制器之间提供数据交换。
CAN-BUS系统
⑦整个网络的配置信息只包含在主节点中, 从节点可以自由地接入或脱离网络而不影 7 响网络中的通信LIN的网络结构。
⑧基于通用UART接口。几乎所有微控制
8
器都具备LIN必需的硬件,价格低廉、结
构简单。
汽车电器基础
3.MOST总线 (1)MOST总线的应用 MOST是一种用于多媒体数据传送的网络系统,专门针对汽车而开发的, 采用光纤(不受电磁辐射干扰与搭铁环的影响)作为物理层的传输介质,将 视听设备、通信设备以及信息服务设备相互连接起来。
can和lin通讯原理

can和lin通讯原理CAN(Controller Area Network)和LIN(Local Interconnect Network)是两种常用的网络协议,主要用于在车辆电子系统中实现通信。
CAN和LIN通讯原理及其在车辆电子系统中的应用如下所述。
1.CAN通讯原理CAN是一种串行通信协议,基于非常可靠的多主控制器和多接收器的总线结构。
CAN总线传输数据以消息的形式,每条CAN消息由起始位、标识符、数据长度码、数据域和校验码组成。
CAN的通讯原理主要包括以下几个方面:-主从通信:CAN总线结构中可以同时存在多个主控制器和多个接收器。
主控制器负责发起通信并控制之间的数据传输,接收器负责接收指定的消息。
-冲突检测:当两个或多个主控制器同时尝试在CAN总线上发送消息时,可能会发生冲突。
CAN使用非毁灭性位操作标准来解决这个问题,冲突检测机制确保在总线上只有一个主控制器发送消息。
-帧格式和标识符:CAN消息的帧格式分为标准格式和扩展格式。
标准格式使用11位标识符,扩展格式使用29位标识符。
标识符的唯一性确保了在总线上不发生冲突。
-线性拓扑结构:CAN总线通常采用双绞线或同轴电缆连接,形成线性的拓扑结构。
这种结构简化了网络连接,方便了在车辆电子系统中的布线。
在车辆电子系统中,CAN通信广泛应用于传感器、执行器、控制单元等设备之间的数据传输。
例如,引擎控制单元(ECU)通过CAN总线与传感器(如节气门传感器、氧气传感器等)和执行器(如点火线圈、燃油喷射器等)进行通信,实现对引擎的精确控制。
2.LIN通讯原理LIN是一种低成本、低速率的串行通信协议,用于连接车辆电子系统的较低级别设备,如门控制模块、后视镜控制模块等。
LIN总线通过从设备进行控制,从而降低了通讯成本。
LIN的通讯原理主要包括以下几个方面:-主从通信:LIN总线采用从设备进行控制的方式,从设备由主节点(主控器)提供电源和时钟信号。
主节点负责发送命令和控制帧,从节点负责响应和返回数据。
从应用角度了解下LIN总线

从应用角度了解下LIN总线主要内容o LIN总线概述o LIN总线的应用o示例:LIN总线和CAN总线的窗户控制o LIN总线的信号报文o记录LIN总线数据o LIN总线数据记录应用案例本文将介绍LIN(Local Interconnect Network,本地连接网络)协议的基本知识,包括LIN总线和CAN总线的对比、LIN总线的应用案例、LIN是如何运行的以及LIN中的6种帧类型;另外,这是一篇偏实用的简介,所以里面还会介绍到LIN总线数据记录的基础知识。
什么是LIN总线LIN总线是CAN总线的补充,它的可靠性以及性能较低,但成本也是比较低的。
下面我们将简单介绍下LIN总线的特点以及其和CAN总线之间的异同。
•更低的成本(如果对速度或者容错性的要求较低)•常用在车辆的窗户、雨刮器、空调等•LIN集群中只有一个主节点和最多有16个从节点•只有一根信号线(需要配合地线),波特率为1-20 kbit/s,线缆最长能达40米•由时间出发的调度表能保证报文间延迟的时间•可变的数据长度(2、4、8字节)•LIN总线支持错误检查、校验和配置•工作电压为12V•物理层是基于ISO 9141(K线)•支持睡眠模式和唤醒•现在的新车上都还有10个以上的LIN节点LIN总线和CAN总线的对比•LIN总线的成本更低(线束更少、不需要购买许可以及节点更便宜)•CAN总线使用双绞屏蔽线-5V,LIN总线使用单线-12V•LIN总线中的主节点通常也是一个CAN、LIN的网关•LIN总线报文发送的顺序是确定的,不是事件驱动的,即没有总线仲裁•LIN总线中主节点只能有一个,而CAN总线没有主从的概念•CAN总线会使用11或29位的标识符,LIN总线中的标识符是6位的•CAN总线的波特率能达1Mbit/s而LIN总线的波特率最大也就20 kbit/sLIN总线的历史下面我们简要的回顾下LIN总线规范的历史吧~1999年:LIN 1.0由LIN联盟(宝马、大众、奥迪、沃尔沃、梅赛德斯奔驰、瑞典的火山汽车以及摩托罗拉)发布•2000年:LIN协议被更新了(LIN 1.1和LIN1.2)•2002年:发布了LIN1.3,主要是修改了物理层•2003年:发布了LIN 2.0,可以说是全新一代,也被广泛使用•2006年:发布了LIN 2.1•2010年:发布了LIN 2.2A,是现在广泛采用的版本•2010-12年:基于LIN 2.0,SAE将LIN标准化为SAE J2602•2016年:CAN in Automation(CiA)也将LIN标准化了(ISO 17987:2016)LIN总线的未来LIN总线正在为当代车辆提供低成本的功能扩展中,起到越来越重要的作用。
四种主流的汽车总线:CAN、LIN、FlexRay和MOST总线技术详解
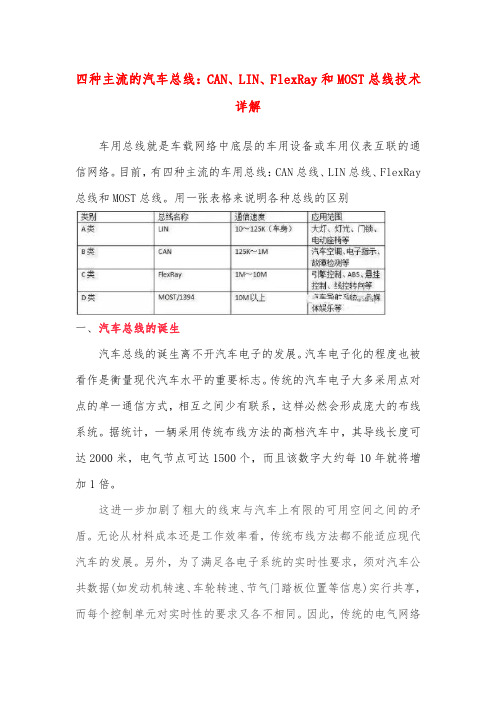
四种主流的汽车总线:CAN、LIN、FlexRay和MOST总线技术详解车用总线就是车载网络中底层的车用设备或车用仪表互联的通信网络。
目前,有四种主流的车用总线:CAN总线、LIN总线、FlexRay 总线和MOST总线。
用一张表格来说明各种总线的区别一、汽车总线的诞生汽车总线的诞生离不开汽车电子的发展。
汽车电子化的程度也被看作是衡量现代汽车水平的重要标志。
传统的汽车电子大多采用点对点的单一通信方式,相互之间少有联系,这样必然会形成庞大的布线系统。
据统计,一辆采用传统布线方法的高档汽车中,其导线长度可达2000米,电气节点可达1500个,而且该数字大约每10年就将增加1倍。
这进一步加剧了粗大的线束与汽车上有限的可用空间之间的矛盾。
无论从材料成本还是工作效率看,传统布线方法都不能适应现代汽车的发展。
另外,为了满足各电子系统的实时性要求,须对汽车公共数据(如发动机转速、车轮转速、节气门踏板位置等信息)实行共享,而每个控制单元对实时性的要求又各不相同。
因此,传统的电气网络已无法适应现代汽车电子系统的发展,于是新型汽车总线技术便应运而生。
二、CAN总线CAN总线又称作汽车总线,全称为“控制器局域网(Controller Area Network)”,是一种能有效支持分布式控制和实时控制的串行通讯网络。
它将各个单一的控制单元以某种形式(多为星形)连接起来,形成一个完整的系统。
CAN总线最早是德国Bosch公司为解决现代汽车中众多的电控模块(ECU)之间的数据交换而开发的一种串行通讯协议。
现今在汽车电子系统中已得到广泛应用,成为欧洲汽车制造业的主体行业标准,代表着汽车电子控制网络的主流发展趋势。
世界上很多著名的汽车制造厂商,如Volkswagen(大众)、Benz(奔驰)、BMW(宝马)、Porsche(保时捷)、Rolls.Royce(劳斯莱斯)等公司都已经采用CAN总线来实现汽车内部控制系统的数据通信。
通讯协议中的CAN和LIN技术比较

通讯协议中的CAN和LIN技术比较随着现代科技的发展,车载电子系统越来越复杂,为了确保各个系统之间的通讯和协调,通讯协议变得至关重要。
通讯协议是为了使不同设备之间进行通讯而制定的规则,而在车载电子系统中,最为常用的通讯协议是CAN和LIN技术。
本文将会介绍CAN和LIN技术的区别和优缺点,以及在不同场景下的使用情况。
CAN(Controller Area Network)通讯协议被广泛用于车载系统中,主要是由于其优异的总线传输速度和稳定性以及为多个 ECUs (Electronic Control Units)之间提供了最有效的通信方式。
CAN通讯协议在许多方面都是非常有优势的,例如其200 米的总线长度,33 个不同节点和数据传输速度高(1 Mbps及更高)等。
CAN通讯协议是一种基于广播和有条件的订阅/发布的协议。
因此,它支持多点广播和点对点通信,同时也提供了从节点向主节点发送请求或错误的能力。
虽然CAN在通信速度、可靠性和灵活性方面具有显著的优势,但它不适用于每个系统。
相比之下,LIN(Local Interconnect Network)协议在车载电子系统中的应用相对较少。
LIN协议主要在控制较简单的ECUs之间进行通信。
由于LIN的总线传输速度最高仅为20 kbps,因此在需要高速数字通信和大量数据传输的系统中不太适合。
而LIN通讯协议通常用于低端ECUs之间的点到点通信以及在系统中的边缘部分执行人机交互。
LIN协议最适用于将数据从一个ECU发送到另一个ECU时,例如在车门系统中锁定或解锁车门。
此外,由于其低成本和低功耗,LIN协议也常用于车载多媒体系统、仪表和照明控制中。
虽然CAN和LIN通信协议在车载电子系统中使用的场景不同,但它们都有各自的优缺点。
CAN通讯协议在高速传输和处理大量数据时非常有效,可以在不影响系统响应和性能的情况下支持多地点广播和多点响应等。
但是,由于CAN通讯协议更加灵活和可定制,因此会导致更多的状况处理和管理问题。
can协议 lin电平
can协议 lin电平
CAN协议和LIN电平是现在广泛应用于汽车电子领域的两种常用通信协议和电平标准。
首先,CAN协议是指控制器区域网络协议,是一种分布式控制通信协议。
它是基于广播通信方式,所有节点都可以发送和接受信息,而且CAN协议具有高可靠性和高实时性,可实现长距离通信和高速通信。
CAN协议允许多个节点同时发送信息,也允许在传递信息时发现和纠正出现的错误。
因此,CAN协议是一种重要的现代汽车中控制系统所使用的通信协议。
而LIN电平是指局域网互连网络电平,是一种低速串行总线系统。
与CAN不同,它是在低配车型中用于充当仪表盘和不同系统之间的连接纽带等简单任务的通信协议。
LIN电平允许只能一个节点发送信息,具有较低的带宽和流量,并能够进行较长时间的同步传输。
此外,LIN 电平还采用了比CAN更低的电压电平,可以直接与汽车电池连接,实现更好的低功耗优化。
综上所述,CAN协议和LIN电平在不同的场合都有其特定的优点和限制,可以相互补充和替代。
在汽车电子领域,复杂的车辆控制系统需要各种通信协议和电平标准的共同支持。
因此,如果您希望深入了解
汽车电子领域中CAN协议和LIN电平的应用,可以阅读相关的技术文献或参加相关的培训课程,提升自己的专业水平。
CAN与LIN区别
总线类型
通讯模式
通信速率
输入电压
价格
应用介绍
LIN
单线通讯
20Kbit/s
+12V输入输出单端非平衡信号
Flexray总线
10Mbp/s
更高
用于事关安全的线控系统和动力系统,在宝马的高端车上有应用,应用较少.
A
LIN是由摩托罗拉与奥迪等公司开发,LIN是CAN的补充,是一种辅助总线,芯片小价格低,应用广泛。
在选择的时候,车厂可根据速度和成本的要求,决定是要采用CAN或LIN。一般来说,车内采用LIN的机制,多半是诸如例如转向定时速度控制、雨刮器控制、车灯控制、后视镜控制、电动车窗、电动座椅调整、发电系统、空调机控制等。而且能够大幅降低线路复杂性和车身重量,并且提高可靠性
Can
双线通讯
1Mbit/s
输入、输出为差动信号5v
A+10%
德国Bosch公司开发,CAN网络的配制比较容易,允许任何站之间直接进行通信,而无需将所有数据全部汇总到主计算机后再行处理。应用广泛。
汽车业普遍将CAN做为引擎管理、车体电子(如:车门和车顶控制、空调和照明)、以及娱乐控制的车内网络(IVN)。而用于引擎管理CAN,并与多个电子控制单元相连,甚至是将CAN基础网络安装在电源引擎系统中或与信息娱乐设备连接
用于汽车电子的CAN、LIN、MOST总线 基础知识
用于汽车电子的CAN、LIN、MOST总线未来汽车电子的整个网络将是CAN、LIN、MOST三网合一的整体。
MOST负责音视频,CAN负责重要的电子控制单元,如发动机、ABS、安全气囊等,LIN负责次要的电子控制单元,如门窗、车灯等。
一、CAN总线技术简介CAN总线又称作汽车总线,其全称为“控制器局域网(CAN—Controller Area Network)”。
CAN总线是一种现场总线(区别于办公室总线),是德国Bosch公司为解决现代汽车中众多的电控模块(ECU)之间的数据交换而开发的一种串行通信协议。
CAN总线的设计充分考虑了汽车上恶劣工作环境,可*性高。
因此CAN总线在诸多现场总线中独占鳌头,成为汽车总线的代名词。
随着车用电气设备越来越多,从发动机控制到传动系统控制,从行驶、制动、转向系统控制到安全保证系统及仪表报警系统,从电源管理到为提高舒适性而作的各种努力,使汽车电气系统形成一个复杂的大系统,并且都集中在驾驶室控制。
另外,随着近年来ITS的发展,以3G(GPS、GIS和GSM)为代表的新型电子通讯产品的出现,它对汽车的综合布线和信息的共享交互提出了更高的要求。
从布线角度分析,传统的电气系统大多采用点对点的单一通信方式,相互之间少有联系,这样必然造成庞大的布线系统。
据统计,一辆采用传统布线方法的高档汽车中,其导线长度可达2000米,电气节点达1500个,而且,根据统计,该数字大约每十年增长1倍。
无论从材料成本还是工作效率看,传统布线方法都将不能适应汽车的发展。
从信息共享角度分析,现代典型的控制单元有电控燃油喷射系统、电控传动系统、防抱死制动系统(ABS)、防滑控制系统(ASR)、废气再循环控制、巡航系统和空调系统。
为了满足各子系统的实时性要求,有必要对汽车公共数据实行共享,如发动机转速、车轮转速、油门踏板位置等。
但每个控制单元对实时性的要求是因数据的更新速率和控制周期不同而不同的。
这就要求其数据交换网是基于优先竞争的模式,且本身具有较高的通信速率,CAN总线正是为满足这些要求而设计的。
新能源汽车不同类型的总线标注方法
新能源汽车不同类型的总线标注方法
新能源汽车中常用的总线类型主要包括LIN总线、CAN总线、FlexRay总线和MOST总线等,它们各自有不同的标注方法和应用场景。
具体如下:
1. LIN总线:LIN(Local Interconnect Network)是一种低成本的串行通信网络,通常用于汽车中的分布式电子系统控制。
它通常作为CAN总线的辅助功能使用,在不需要高带宽和多功能场合,如智能传感器和制动装置之间的通讯,使用LIN总线可以节省成本。
2. CAN总线:CAN(Controller Area Network)是一种能够实现分布式实时控制的串行通信网络。
由德国Bosch公司开发,广泛应用于汽车电子控制系统中。
CAN总线具有优秀的特性,能够在不同的ECU(电子控制单元)之间传递信息。
需要注意的是,不同速度类型的CAN总线设备不能直接连在同一路总线上,它们之间需要通过网关隔离。
3. FlexRay总线:FlexRay是一种为满足更高数据传输速率而设计的通信协议,它比CAN和LIN总线有更高的速度和确定性,通常用于实时性要求较高的应用,如动力控制系统和底盘控制。
4. MOST总线:MOST(Media Oriented Systems Transport)总线是一种多媒体定向系统传输技术,主要用于车载娱乐和信息系统的数据传输。
它可以传输音频、视频、数据和控制信号,具有较高的带宽和集成度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双线通讯
1Mbit/s
输入、输出为差动信号5v
A+10%
德国Bosch公司开发,CAN网络的配制比较容易,允许任何站之间直接进行通信,而无需将所有数据部汇总到主计算机后再行处理。应用广泛。
汽车业普遍将CAN做为引擎管理、车体电子(如:车门和车顶控制、空调和照明)、以及娱乐控制的车内网络(IVN)。而用于引擎管理CAN,并与多个电子控制单元相连,甚至是将CAN基础网络安装在电源引擎系统中或与信息娱乐设备连接
Flexray总线
10Mbp/s
更高
用于事关安全的线控系统和动力系统,在宝马的高端车上有应用,应用较少.
总线类型
通讯模式
通信速率
输入电压
价格
应用介绍
LIN
单线通讯
20Kbit/s
+12V输入输出单端非平衡信号
A
LIN是由摩托罗拉与奥迪等公司开发,LIN是CAN的补充,是一种辅助总线,芯片小价格低,应用广泛。
在选择的时候,车厂可根据速度和成本的要求,决定是要采用CAN或LIN。一般来说,车内采用LIN的机制,多半是诸如例如转向定时速度控制、雨刮器控制、车灯控制、后视镜控制、电动车窗、电动座椅调整、发电系统、空调机控制等。而且能够大幅降低线路复杂性和车身重量,并且提高可靠性