基于MATLAB模糊自整定PID控制器的设计与仿真
基于MATLAB模糊自适应PID 控制器的设计
基于MATLAB模糊自适应PID 控制器的设计The fuzzy PID controller and‘its simulation Abstract:This paper discusses the design of fuzzy PID controller and he method of realization using MATLAB software.The result of simulation in MATLAB/Simulink indicates that the controlle r evidently improves the dynamic property of control system.The controlle r is easily realized and applied in engineering.First, let's take a look at how the PID controller works in variable (e) represents the tracking error, the difference between the desired input value (R) and the actual output (Y). This error signal (e) will be sent to the PID controller, and the controller computes both the derivative and the integral of this error signal. The signal (u) just past the controller is now equal to the proportional gain (Kp) times the magnitude of the error plus the integral gain (Ki) times the integral of the error plus the derivative gain (Kd) times the derivativeof the error.摘要: 基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整摘要: 基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。
基于MATLAB的模糊自整定PID参数控制器的设计与仿真

2模糊自整定PID参数控制策略与 整定原则
杨咏梅:硕士研究生
国家自然科学基金资助项目(G0501080160302001) 电话:010-62132436.62192616(T/F)
4模糊自整定PID参数控制系统仿真
0
0.5
I.0
1 5 20
25
30
(2)输出KP、KI、KD的隶属函数曲线
图2隶属函数曲线图
(3)模糊控制规则表
根据上述的PID参数整定原则及专家经验,可以
列出输出变量KP、KI、KD的控制规则如表1-3所
示。 3.2模糊控制器的编辑
在SIMULINK环境对图1所示的模糊自整定PID 参数控制系统编辑,得到如图3所示的系统仿真框 图。在系统仿真时,我们选择被控对象的传递函数为: G(s)=l/(2Sz+3s+1)。然后按SIMUL]NK仿真的正确步骤 选择计算步长、模拟示波器X/Y轴参数等进行仿真运 算。
b模糊控制器的控制规则对模糊自整定PID参数 控制系统中的参数影响较大。这将直接影响系统的调 节效果.应对模糊控制器的FIS规则语句的权值和控 制规则表作适当的修改和调整。
图4 PID控制系统响应曲线 图5模糊自整定PID参数控制系统响应曲线
c.采用Fuzzy和PID复合控制的算法,系统的响 应速度加快、调节精度提高、稳态性能变好,而且没有 超调和振荡.具有较强的鲁棒性。这是单纯的PID控 制难以实现的,它的一个显著特点就是在同样精度要 求下,系统的过渡时间变短,这在实际的过程控制中 将有重大的意义。
基于Matlab参数自整定PID控制器的设计与仿真

《自动化技术与应用》2009年第28卷第1期Techniques of Automation & Applications | 31工业控制与应用Industry Control and Applications基于Matlab 参数自整定PID 控制器的设计与仿真王勃群1,蔺小林2,汪 宁1(1.陕西科技大学,电气与信息工程学院,陕西 西安 710021;2.陕西科技大学理学院,陕西 西安 710021)摘 要:本文针对常规PID控制器不能在线进行参数自整定的问题,结合模糊控制技术,提出了一种模糊自整定PID参数的方法,并利用Matlab的模糊控制工具箱以及Simulink对其进行了仿真,结果表明设计的自整定PID模糊控制器具有控制精度高,超调小,动态性能好的特性。
关键词:模糊控制器;Matlab;温度控制;参数自整定中图分类号:TP273.2 文献标识码:A 文章编号:1003-7241(2009)01-0031-04Matlab-Based Auto-Tuning PIDWANG Bo-qun 1, LIN Xiao-lin 2, WANG Ning 1(1. Electrical & Information Engineer College of Shaaxi University of Science &Technology Xi’an 710021 China;2. Faculty science college of Shaaxi University of Science &Technology Xi’an 710021 China)Abstract: This paper presents a fuzzy auto-tuning method for the PID controller. Simulation with the fuzzy control toolbox of theMATLAB is also presented.Keywords: fuzzy controller; matlab; temperature control; parameters auto-tuning收稿日期:2008-07-181 引言在控制系统里,如果难以获得被控制对象的数学模型,或者被控对象是个比较复杂的非线性、时变而且又有大的滞后的系统,一般的PID控制难以达到预期的效果,而模糊控制技术在复杂、大滞后、难以建立精确数学模型的非线性控制过程中表现出了优越的性能。
基于MATLAB的模糊PID控制器设计与仿真研究
35
万方数据
机 车 电 传 动 2002年
2002 年第 5期 2002 年9 月10 日
机车电传动 ELECTRIC DRIVE FOR LOCOMOTIVES
基于M A T L A B 的模糊P I D 控制器
研 究
设计与仿真研究
开
发
常满波 胡鹏飞
西南交通大学 电气工程学院 四川 成都 610031
摘 要 针对在复杂系统中实现自组织参数的 P I D 控制问题 介绍了一种基于模糊控制原 理的 P I D 参数自组织控制器的设计方案 同时利用 M A T L A B 中的 S I M U L I N K 和 F U Z Z Y 工具箱 进行了仿真研究 仿真结果表明 参数自组织模糊控制系统比参数固定的系统的控制效果好
关键词 P I D 控制器 M A T L A B 模糊控制 仿真 中图分类号 TP391.9 文献标识码 A 文章编号 1000-128X(2002)05-0034-03
5 ,2002 Sep. 10,2002
作者简介 常满波 1976- 男 西南交通大学电气工 程学院硕士研究生 主要 从事计算机应用技术的研 究
图8 G1(s)仿真结果
图9 G2(s)仿真结果
过程 G1(s)
G2(s)
表2 仿真结果分析
常规PID控制
Kp=2.81 Ki=1.64 Kd=0.41
YOS=18.7% TS=4.38 s
Kp=0.95 Ki=1.03 Kd=0.26
YOS=33.2% TS=7.33 s
设被控对象的数学模型为
图 4 Kp K i D d 的隶属函数
根据以上分析和语言变量的设定 可以总结出 Kp K i 和 K d 的自调整控制规则 见表 1
基于MATLAB的模糊PID控制系统的设计与仿真
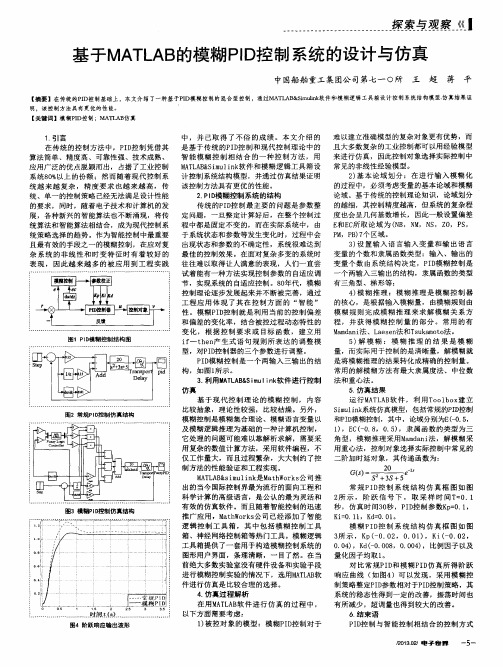
工 程 应 用 体 现 了 其在 控 制 方 面 的 “ 智能 ” 的核 心 ,是根 据输 入模 糊量 ,由模 糊规 则 由 性 。模 糊P I D 控 制就 是 利 用 当前 的 控 制偏 差 模 糊 规 则 完 成 模 糊 推 理 来 求 解 模 糊 关 系方 和 偏差 的变 化 率 ,结合 被控 过程 动态 特性 的 程 , 并 获 得 模 糊 控 制 量 的部 分 。常 用 的成 绩 。本 文 介 绍 的 难 以建 立准 确模 型 的复 杂对 象更有 优 势 ,而 是基 于 传 统 的P I D 控 制和 现 代 控 制理 论 中 的 且 大 多数复 杂 的工 业控 制都 可 以用 经 验模 型 智 能 模 糊 控 制 相 结 合 的一 种 控 制 方 法 , 用 来 进行 仿真 ,因此 控制 对象 选择 实 际控 制 中 M A T L A B & S i m u l i n k 软 件 和 模糊 逻 辑工 具 箱 设 常见 的非线 性经 验 模型 。 2 ) 基 本 论 域 划 分 : 在 进 行 输 入 模 糊 化 计控 制 系统结 构模 型 ,并 通过 仿真 结 果证 明
图1 P I D 模糊控制 结构 图
a m d a n i 法 、L a e s e n 法和T s u k a m o t o 法。 : 变 化 ,根 据 控 制 要 求 或 目标 函 数 ,建 立 用 M i f —t h e n 产 生 式 语 句 规 则 所 表 达 的调 整 模 5 ) 解 模 糊 : 模 糊 推 理 的 结 果 是 模 糊 型 ,对 P I D 控制 器 的三 个参 数进 行调 整 。 量 ,而 实 际用于 控制 的 是清 晰量 ,解模 糊就
P I D 模 糊 控 制 是 一个 两输 入 三 输 出 的结 是将 模 糊推 理 的结果 转化 成精 确 的控制 量 。 构 ,如 图i 所示 。 常用 的解 模 糊方 法有 最大 隶属度 法 、 中位数 3 . 利 用M A T L A B & S i m u l i n k 软件 进 行控 制 法和 重 心法 。
基于MATLAB的模糊PID控制器的设计

最优控制与智能控制基础文献总结报告基于MATLAB的模糊PID控制器的设计1课题背景、意义及发展现状随着越来越多的新型自动控制应用于实践,其控制理论的发展也经历了经典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构加到被控系统上;控制系统的被控量,经过传感- 1 -器、变送器通过输入接口送到控制器。
不同的控制系统,传感器、变送器、执行机构是不一样的。
比如压力控制系统要采用压力传感器;电加热控制系统要采用温度传感器[1]。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用。
比如,工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求[2]。
PID控制器可以根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。
PID(比例积分微分)控制具有结构简单、稳定性能好、可靠性高等优点,尤其适用于可建立精确数学模型的控制系统。
而对于一些多变量、非线性、时滞的系统,传统的PID控制器并不能达到预期的效果。
随着模糊数学的发展,模糊控制的思想逐渐得到控制工程师们的重视,各种模糊控制器也应运而生。
而单纯的模糊控制器有其自身的缺陷—控制效果很粗糙、控制精度无法达到预期标准。
但利用传统的PID控制器和模糊控制器结合形成的模糊自适应的PID控制器可以弥补其缺陷;它将系统对应的误差和误差变化率反馈给模糊控制器进而确定相关参数,保证系统工作在最佳状态,实现优良的控制效果[3]。
1.模糊PID控制器的设计1.1模糊PID控制器的工作原理模糊PID控制器是以操作人员手动控制经验总结出的控制规则为核心,通过辨识系统当前的运行状态;经过模糊推理,模糊判决,解模糊过程得到确定的控制量以实现对被控对象的在线控制。
基于Matlab 的模糊PID 运动控制系统的设计与仿真

– 84 –工装设计·基于Matlab 的模糊PID 运动控制系统的设计与仿真doi:10.16648/ki.1005-2917.2020.02.069基于Matlab 的模糊PID 运动控制系统的设计与仿真吕帅(苏州大学机电工程学院,江苏 苏州 215000)摘要: 在以往的工业控制系统设计过程中,PID 控制一直是应用最为广泛的一种系统,具有算法简易、系统成熟的特点,并且有极高的可靠性和精准性。
在现代技术的影响下,控制系统的组成和设计都逐渐趋于复杂,同时对控制系统精度的要求也不断提高。
如果一直使用以往的控制策略,无法完全满足人们对控制系统性能的需求,给部分活动的开展带来了一定的影响。
随着智能算法的不断普及,传统算法也开始出现了新的改变,逐渐与智能算法进行了深度融合,模糊控制属于智能控制中的一种有效手段,被广泛的应用在各种工业实践活动中。
本文深入分析了基于Matlab 的模糊PID 运动控制系统的设计与仿真。
关键词: Matlab ;模糊PID ;运动控制系统;设计;仿真PID 控制理论出现时间较长,在不同行业的生产活动中都有所应用,这主要是由于PID 控制理论相对于其他控制策略来讲有着独特的优势。
虽然PID 控制理论在操作和实践中都能取得不错的效果,但是如果控制对象具有时变性或者非线性的特点时,往往无法取得预想中的效果,会给系统的运行带来一定的影响。
模糊PID 运动控制系统的工作原理与传统的PID 控制理论相似,并且具有智能化的优势,改变了传统控制理论的局限性。
模糊PID 控制理论能够更加高效的控制系统运行,利用Matlab 软件能够对模糊PID 控制系统的结构进行模拟和设计,也可以在经过仿真后验证这种系统的实际性能,可以提高运动控制系统的工作效率。
1. 模糊PID 运动控制系统结构模糊PID 运动控制系统的结构分为两个部分,分别是参数可以调整的PID 以及模糊控制系统[1]。
以往所使用的PID 控制器在使用过程中经常出现参数问题,在调定参数的过程中,控制系统是处于不变状态的,但是系统却又在运行过程中极其容易受到外界因素的影响,进而使参数的准确性也受到了影响,导致系统控制的效果也会出现下降的状况。
基于Matlab的参数模糊自整定PID控制器的设计与仿真

20 0 8年 1 2月
中原 工 学 院 学 报
J OURNAI 0F ZH0NGYUAN UNI RS TY 0F TECH N0L VE I 0GY
V0 . 9 NO 6 11 .
De ., 08 c 20
文章 编 号 : 6 1 9 6 2 0 ) 6 0 6 —0 1 7 —6 0 ( 0 8 0 — 0 8 4
2 参 数 模 糊 自整定 P D 控 制 器 设 计 I
取当前采样值
2 1 设 计 论 域 和 模 糊 规 则 表 .
I
e )r )v ( =( - 1 k k
输 入 变量 I 和 l 语 言 值 的模 糊 子 集 取 为 { l c e l 负 大, 负中 , 负小 , , 小 , 中 , 大 } 并 简 记 为 { 零 正 正 正 , NB, NM , ~S, ,P S,P ,PB} 论 域 为 { 3 3 . M , 一 , } 以 k 、 k k 、 3个参数 作 为输 出变量 , k、 模糊 量 的模 k 、 k 糊子集 取 为 { 大 , 中 , 小 , , 小 , 中 , 大 } 负 负 负 零 正 正 正 , 并 简记 为 { NB, NM , ,Z NS O,PS, M ,P , 的 P B} k 论 域 为 { . ,. }k 一0 3 0 3 , 的论 域 为 { . 6 0 0 } k 一0 0 , . 6 , 的论域 为 { , }其 中 NB、 一3 3 . PB取 S形 隶 属度 函数 ,
1 参 数 模 糊 自整 定 P D 控 制 原 理 I
参数 模糊 P D 自整 定控 制 是 以误 差 l { I 和误 差 变 e
化 lC 作 为 模 糊 P D 控 制 器 的 输 入 , 以 满 足 不 同 时 l e I 可
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
nq知 l表, 和榄糊避辑的 则推理 为珊 l 沱壤础.采用讣雄
与 。均成取大螳 ,同时 为避免 系统 在矬定 值附近 m脱掀
机拄 制技 术构 j戊的一种 具钉 厦馈通 道的闭环数 ≯控制系统 雠糊控制脲理 土坚包括 雎Ip的模糊 鲢化处理 、摸糊 摊 制脱 lllJ、模蝴决策 、0:模糊化处理 等环竹组成的馁糊控 捌 ;}= l}
仪需要 f研的经骑羽I技巧.m儿十分龆时 删I埘.靠实际 控制系统控 制过 III.Ill r噪声 .饥栽扰动平fI 他 · 环 境条件变化的蟛 响,受控址 襁参数.模型结构均将发生变
脚 I 榄蝴 PID控 制吊龇 · 拘罔
化 这 种恃税 下.1采用 常规 PID捕制器雕以获樽满意舳 控制效 .『flj模糊杜制 依赖被拄卅 象精确的数学 模 . 是在总童l Ji拇作 始jI禽玷础 l 炎现 自动控制的一种手段。本文 应 用模糊推删l的方法实现时 PID参数的在线 自动档定 ,弹 依 此 殳计lf1 -般挎{l}lj系统 的模糊参数 一憔定 PID控制器 齄千。MATLAB的仿真结 槊丧f蝣,与常舰 PID控制 系统相 比,改泄仆能 挟得 世优 的舟榨性 和动、静态性及县有 良好 旧m &m I:
表 2 K.模 糊 规 则 表
NB NM NS O PS PM PB
NB NB N B NM NM O O
NB NB NM NM NS O O
NM NM NS NS O PS PS
NM NS NS O Ps NM PM
1, O,K,t=1。
在 调 试 中 ,可 以 知 道 :模 糊 控 制 器 输 入 变 量 的 量 化 因 子 、 对 控 制 系统 的动 态 性 能 影 响较 大 , 选 得 较 大 , 系统 的 超 调 较 大 ,过 渡 时 间较 长 。 选 得 较 大 ,超 调 减 小 ,并且 越 大系统超调越小 ,但系统 的响应速度 会变 慢 。实 际 ,量 化 因 子 和 二 者 之 间 也 相互 影 响 。
(2)愤糊拄制 PII)拄iIjIJ系统皇占掏 夺 文彳E常舰 PID齄础 I . 被控对 象的厦馈监 ¨标 值 的 沮 蔗 和 谋 髂 J堕化 钙 EC 作 为 输 入 .用 模 糊 推 理 的 方
荡,井考虑系统的抗 {:扰州:能.脱证 1地选取 俩 K 的进择根 摄 IEC I恤 jI∈确定 lECI较 火l Il『.K 取较 小 假:当1EC J较小叫 .K 墩 较大f ,晒常情况 下 K.,为叶|等 太 小
s+l (2)基 于 MATLAB 的 系统 仿 真 根 据 上 面 的 分 析 和 被 控 对 象 的 传 递 函 数 , 在 SIMULINK 窗 口建 立 系 统 建 立 了一 个 mdl仿 真 模 型 , 保 存 为 fuzzy.mdl如 图 3所 示 。 这 样 就 町 以 利 用 PID.f is读 出 模
(,) PJf)参 数 艟 定 原 划 懂4姑系统 受扮_i==上程,l r划 同的 E和 EC.将 PID 参数构档缝蟓则 蚪纳 如 F: (D 当 l 较 大tt,J.|兑 误箍的绝 埘似较大 . 鹿取 较大值. 提高响聪呻快逮慨 :而 防止 1 c l瞬II,J过大 . 成 该取较小 帕值;同时为避免出现较夫∞超斓 .成 对移{ 分作 用加 以限制.遵常取 K.一1 ( JEl处 『·肄大 、叫 ,为使 系统响 应超 较小 .
2模 糊 参 数 自整 定 PID 控 制 器 的设 计
K 应取 小 些 。在 这 种 情 况 下 .K 的 取 侬 对 幕 统 响 应 彬 响 较
(1]模 糊 托 制
大 ,K.的取 位 要适 当
●■■■■■■■■■■■模■糊■控■■制■足■以■模■■糊■浆■合■论■■、■模■糊 ■数 ■■学■、■横 ■■栅■爵■, ■形 ■ ■■■■■■■■■■■■J ■J ■轻■小_J _j寸_._为-使 __系_统_H -_有_较_好 _-朐_稳_定__性-, ●●●●●●●●●●●
NS NS O PS Ps PM PM
O O PS PM PM PB PB
0 O PS PM PB PB PB
裹 3 Kd模 糊 规 则 表
NB NM NS O PS PM PB
==:
PS NS
PS NS
O
NS
O
NS
O O
PB Ps
PB PM
NB N B NM NS O PS PM
: :: : ::
NB NB NM PS
NM NM NS O
NM NS NS O
NS NS NS O
O
O
O
O
PS PS
Ps
PB
PM PS PS
PB
图 2 建 立 模 糊 控 制 器 的规 划 编 辑 器
PB
O
O
NM NM NM
:==::
PS O
O
O
PS NS
NS NM
NM NM
NM NB
NB NB
根 据模 糊 规 则 表 在 线 修 正 PID参 数 ,计 算 公 式 如 下 : Kp=K'p+AKp;K K +AK ;Kd=K 十△Kd; 其 中 K K 、 为原先定好 的初 始 PID参数 。△ 、AK 、A 为模 糊控 制 器 的 三 个 输 出参 数 , 可 根 据 被 控 对 象 的 状 态 自动 调 整 PID 的 三个 控 制 参 数 的取 值 。 ③ SIMLINK下 的 模 糊 推 理 与模 糊 控制 器 的 建立 由模 糊 控 制 规 则 表 可 将 以上 参 数 调 节 写 成 条 件语 句 形 式 。可 以 利 用 模 糊 逻 辑 工 具 箱 建 立 一 个 fis型 文 件 , 保 存 为 PID.f is。 在 MATLAB命 令 窗 口键 入 fuzzy, 就 会 出 现 一 个 FIS Editor窗 口。本设计 采 用双人 三输 出模 糊控制 器 , 输 入输 出变 量分别为偏 差 E和偏 差变 化率 EC,输 出变量 分别为 、K 、 。在 Edit菜单下 确定输入 、输 出 ,双击 每 个 图 标 就 可 以进 行 编 辑 。 在 File菜 单 下 选 择 Mamdain 型。用 Edit菜单 下的 roles实现编辑模糊规则。 取 输 入 量 E、EC的 隶 属 函数 为 三 角 型 ,输 出 变 量 K。、 、 隶 属 函数 也 为三 角 形 。根 据 控 制 规 则 表 以 if...then的 形 式 在 Ruh Editor窗 口输 入 控 制 规 则 ,模 糊 决 策 一 般 采 用 Mamdani型 推 理算 法 ,解 模 糊 一 般 采 用 重 心 法 (centroid) , 如 图 2所 示 。
, K ,Kj= 卜3,-2,-1,0,1,2,3 J 输 出量 的语 言变 量模 糊 集 为 :
, Ki,Kd= fNB,NM,NS,O,PS,PM,PB J 各个 语言值 的定 义分别 由给 出的三角形隶属 函数曲线 来 描 述 。 ② 建立控制规则表 依据 (3)所述 参数整定 原则及 工程设计 人员 的技 术 知 识 和 实 际 操 作 经 验 ,可 列 出 相 应 的参 数 调 节 规则 ,如 表 1 ̄3所 示 。
(4)横 蝴 挎 制 器 的 设 计 (D 各变量隶属嘲数的确定 模1蜘控制器输人谢 . 变髓的.分别袅永输人 艟的偏差
法 对Pll}的参数 .. .,进行 绒 I嘤窟.以满足 向
羽I偏箍坐化枣 。规定他们的i仑城为 :
收 椭 … 釉:加町 一09一l9
应用与模糊控制
维普资讯
图 4 常规 PID控 制 器 阶跃 响 应
时 间 为 10s)。 (3)仿 真 结 果 分 析 图 4和 图 5分 别 为 常规 PID和 模 糊 参 数 自整 定 PID 控
维普资讯 应 用 与 模 糊
基于MATLAB模糊自整定 PID控制器的设计与仿真
王 三 武 , 董 金发
(武汉理工大学机电学院. 湖北武汉 43007[))
1引 言
n:机lb控 制系统的 泣IJut}ll PID控制器以 斡法简 . 计算 吐小 ,使用 但 .妇棒 性较 强等优点 而得 到r‘泛成
E和 EC时拄制器 参数的不lJ_l1世求 .从 使受 精 州象 具订 良好的动态性能和静态性能 .:楼 参数 r1懂定 PID控制系 统结构框嘲盘¨睡I 1所 永
J1j.仆取得 r良好的挖制效粜 但足对于 一些时变和 绒
的系统常规 HD船 得无能为 ,.常规 PID控制参数
最 制.酬 档 迁 术 吱 观 f】曲 化 . 依 靠 人 丁 凄 瞒 的 艟 定 办 法 不
维普资讯
PLC堕旦与模糊
图 3 模 糊 参 数 自整 定 PID控 制 系 统 仿 真 模 型
糊推理值 作为工程修整参数输 入变量 。使设计 的模糊 控制 器 作 为模 糊 控 制 系统 中 的一 个组 成 部 分 参 与 仿 真 过 程 。 其 中的模 糊 控 制 模 块 由 FIS编 辑 器 依 据 2之 (4)中 的模 糊 控 制器设计过程进行参数设置 和模糊 运算。通过试凑法整定 出 了 一 套 合 适 的 PID参 数 ; 、K 和 的初 值 设 为 : =
3系统 仿 真
(1)仿 真 控 制 对 象 将 该 模 糊 PID 控 制 器 用 于 某 单 水槽 控 制 系统 中 。计 算 机 仿 真 时所 选 择 的单 水槽 广 义 被 控 对 象 的 数 学 模 型是 二 阶 系 统 ,它 的近 似 模 型 为 [4]: G ( )= 20
E,EC= f-3,-2,一1,0,1,2,3l 它 们 的模 糊 集 为 : E,EC= fNB,NM,NS,O,PS,PM,PB} 其 含 义 依 次 为 负 大 、负 中 、负 小 、零 、正 小 、正 中 、 正大 。 输 出 变 量 ,K , 用 以确 定 控 制量 ,并 规定 其 论 域 为 :