用GPIO模拟SPI协议的实现
linuxSPI驱动——gpio模拟spi驱动(转载)
linuxSPI驱动——gpio模拟spi驱动(转载)⼀:⾸先在我的平台注册platform_device,保证能让spi-gpio.c能执⾏到probe函数。
1: struct spi_gpio_platform_data {2: unsigned sck;3: unsigned mosi;4: unsigned miso;5:6: u16 num_chipselect;7: };1: //#define NCS GPIO_PB(2) //定义SS所对应的GPIO接⼝编号2: //#define SCLK GPIO_PB(0) //定义SCLK所对应的GPIO接⼝编号3: //#define MOSI GPIO_PB(4) //定义SCLK所对应的GPIO接⼝编号4: //#define MISO GPIO_PB(1)5: static struct spi_gpio_platform_data jz_spi_gpio_data = {6: .sck = GPIO_PB(0), //GPIO_SPI_SCK,7: .mosi = GPIO_PB(4), //GPIO_SPI_MOSI,8: .miso = GPIO_PB(1), //GPIO_SPI_MISO,9: .num_chipselect = 1,10: };11:12: struct platform_device jz_spi_gpio_device = {13: .name = "spi_gpio",14: .id = 0,15: .dev = {16: .platform_data = &jz_spi_gpio_data,17: },18: };注册platform device1: platform_device_register(&jz_spi_gpio_device);⼆:注册platform_driver在spi_gpio.c⾥⾯注册platform driver1: MODULE_ALIAS("platform:" DRIVER_NAME);2:3: static struct platform_driver spi_gpio_driver = {4: = DRIVER_NAME,5: .driver.owner = THIS_MODULE,6: .remove = __exit_p(spi_gpio_remove),7: };8:9: static int __init spi_gpio_init(void)10: {11: return platform_driver_probe(&spi_gpio_driver, spi_gpio_probe);12: }13: module_init(spi_gpio_init);14:15: static void __exit spi_gpio_exit(void)16: {17: platform_driver_unregister(&spi_gpio_driver);18: }19: module_exit(spi_gpio_exit);20:21:22: MODULE_DESCRIPTION("SPI master driver using generic bitbanged GPIO ");23: MODULE_AUTHOR("David Brownell");24: MODULE_LICENSE("GPL");三:具体算法分析1: struct spi_gpio {2: struct spi_bitbang bitbang; /* gpio 模拟spi算法相关的结构 */3: struct spi_gpio_platform_data pdata; /* spi platform data 对应模拟spi的四个gpio编号 */4: struct platform_device *pdev; /* 对应注册的 platform device */5: };1:2: static int __init spi_gpio_probe(struct platform_device *pdev)3: {4: int status;5: struct spi_master *master;6: struct spi_gpio *spi_gpio;7: struct spi_gpio_platform_data *pdata;8: u16 master_flags = 0;9:10: pdata = pdev->dev.platform_data; /* 存放spi的四根gpio */11: #ifdef GENERIC_BITBANG12: if (!pdata || !pdata->num_chipselect)13: return -ENODEV;14: #endif15:16: /* 申请注册四个gpio */17: status = spi_gpio_request(pdata, dev_name(&pdev->dev), &master_flags);18: if (status < 0) {19: return status;20: }21:22: /* alloc a spi master ,master->dev->p->driver_data = &master[1]*/23: master = spi_alloc_master(&pdev->dev, sizeof *spi_gpio);24: if (!master) {25: status = -ENOMEM;26: goto gpio_free;27: }28: /* spi_gpio指向⼀块空间, 即指向mstaer[1]29: pdev->dev->p->driver_data = spi_gpio;30: 初始化spi_gpio31: */32: spi_gpio = spi_master_get_devdata(master);33: platform_set_drvdata(pdev, spi_gpio);34:35: spi_gpio->pdev = pdev;36: if (pdata)37: spi_gpio->pdata = *pdata;38:39: master->flags = master_flags;40: master->bus_num = pdev->id;41: master->num_chipselect = SPI_N_CHIPSEL;42: master->setup = spi_gpio_setup; /* setup ⽐如cs引脚申请 */43: master->cleanup = spi_gpio_cleanup;44: /* spi_gpio->bitbang.master = master */45: spi_gpio->bitbang.master = spi_master_get(master);46: spi_gpio->bitbang.chipselect = spi_gpio_chipselect;47: /* spi_gpio->bitbang.txrx_word 数组函数四个元素指针,分别指向spi四种mode算法函数 */ 48: if ((master_flags & (SPI_MASTER_NO_TX | SPI_MASTER_NO_RX)) == 0) {49: spi_gpio->bitbang.txrx_word[SPI_MODE_0] = spi_gpio_txrx_word_mode0;50: spi_gpio->bitbang.txrx_word[SPI_MODE_1] = spi_gpio_txrx_word_mode1;51: spi_gpio->bitbang.txrx_word[SPI_MODE_2] = spi_gpio_txrx_word_mode2;52: spi_gpio->bitbang.txrx_word[SPI_MODE_3] = spi_gpio_txrx_word_mode3;53: } else {54: spi_gpio->bitbang.txrx_word[SPI_MODE_0] = spi_gpio_spec_txrx_word_mode0;55: spi_gpio->bitbang.txrx_word[SPI_MODE_1] = spi_gpio_spec_txrx_word_mode1;56: spi_gpio->bitbang.txrx_word[SPI_MODE_2] = spi_gpio_spec_txrx_word_mode2;57: spi_gpio->bitbang.txrx_word[SPI_MODE_3] = spi_gpio_spec_txrx_word_mode3;58: }59: /* spi_gpio->bitbang.setup_transfer初始化传输的bits_per_word和speed */60: spi_gpio->bitbang.setup_transfer = spi_bitbang_setup_transfer;61: spi_gpio->bitbang.flags = SPI_CS_HIGH;62: /* spi_gpio->bitbang相关算法接⼝初始化 */63: status = spi_bitbang_start(&spi_gpio->bitbang);64: if (status < 0) {65: spi_master_put(spi_gpio->bitbang.master);66: gpio_free:67: if (SPI_MISO_GPIO != SPI_GPIO_NO_MISO)68: gpio_free(SPI_MISO_GPIO);69: if (SPI_MOSI_GPIO != SPI_GPIO_NO_MOSI)70: gpio_free(SPI_MOSI_GPIO);71: gpio_free(SPI_SCK_GPIO);72: spi_master_put(master);73: }74:75: return status;76: }四:总之最终让spi_gpi0整个对象存放了整个gpio模拟spi的算法结构;⽽pdev->dev->p->driver_data = spi_gpio;platform device和 platform driver两者match结果是:root@CarRadio:/# ls /sys/bus/platform/devices/spi_gpio.0/ driver modalias power spi0.0 spi_master subsystem uevent root@CarRadio:/# ls /sys/bus/platform/devices/spi_gpio.0/driver/ spi_gpio.0 uevent。
使用MCU的GPIO模拟SPI
使用MCU的GPIO模拟SPI在树莓派等单片机(MCU)上,可以使用GPIO模拟SPI(串行外设接口)来与其他设备进行通信。
SPI是一种同步串行数据传输协议,通常用于连接MCU和传感器、显示器、存储器等外设。
以下是使用MCU的GPIO模拟SPI的详细步骤。
1.了解SPI的基本原理:SPI使用四根信号线进行通信,包括时钟(SCLK)、主机输出从机输入(MOSI)、主机输入从机输出(MISO)和片选(SS)。
-SCLK:时钟信号,由主机产生,用于同步数据传输。
-MOSI:主机输出从机输入,主机将数据发送到从机。
-MISO:主机输入从机输出,从机将数据发送到主机。
-SS:片选信号,用于选择从机。
2.确定所需GPIO引脚:根据所连接的设备的要求,选择合适的GPIO引脚作为SCLK、MOSI、MISO和SS。
3. 配置GPIO引脚:在MCU上,使用相应的编程语言和库函数来配置GPIO引脚。
例如,在树莓派上使用Python编程,可以使用RPi.GPIO库进行配置。
4.编写SPI传输函数:编写一个函数来模拟SPI传输。
该函数应包括以下步骤:a.设置SS为低电平,选中从机设备。
b.发送数据比特串:逐位发送MOSI数据,同时接收并保存MISO数据。
c.设置SS为高电平,取消从机设备的选中。
假设我们要发送8位数据,可以使用以下Python代码实现SPI传输函数:```pythonimport RPi.GPIO as GPIOdef spi_transfer(data):GPIO.output(SS, GPIO.LOW) # 选中从机received_data = 0for bit in range(7, -1, -1): # 逐位传输数据#发送MOSI数据GPIO.output(MOSI, (data >> bit) & 0x01)#接收并保存MISO数据received_bit = GPIO.input(MISO)received_data = (received_data << 1) , received_bit#在SCLK上升沿发送和接收数据GPIO.output(SCLK, GPIO.HIGH)GPIO.output(SCLK, GPIO.LOW)GPIO.output(SS, GPIO.HIGH) # 取消从机选中return received_data```5. 通过调用SPI传输函数与从机通信:在应用程序中,根据需要调用SPI传输函数。
GPIO模拟ST7789V的8080并口通讯
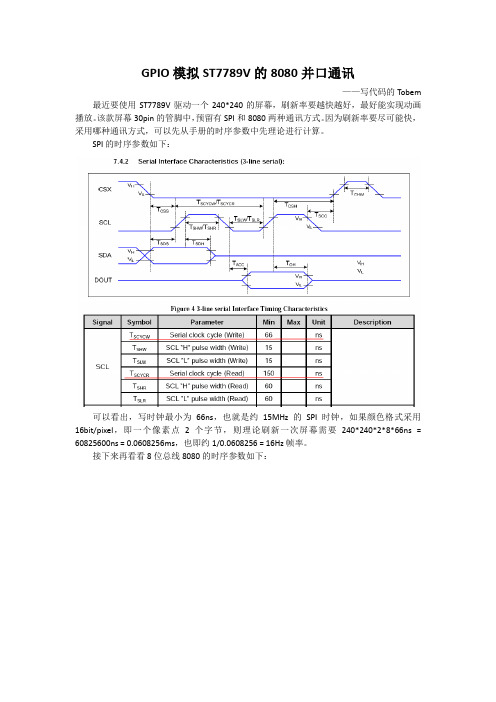
GPIO模拟ST7789V的8080并口通讯——写代码的Tobem 最近要使用ST7789V驱动一个240*240的屏幕,刷新率要越快越好,最好能实现动画播放。
该款屏幕30pin的管脚中,预留有SPI和8080两种通讯方式。
因为刷新率要尽可能快,采用哪种通讯方式,可以先从手册的时序参数中先理论进行计算。
SPI的时序参数如下:可以看出,写时钟最小为66ns,也就是约15MHz的SPI时钟,如果颜色格式采用16bit/pixel,即一个像素点2个字节,则理论刷新一次屏幕需要240*240*2*8*66ns = 60825600ns = 0.0608256ms,也即约1/0.0608256 = 16Hz帧率。
接下来再看看8位总线8080的时序参数如下:可以看出,写时钟最小也为66ns,但由于采用8bit并口通讯方式,所以理论上屏幕刷新率可以达到SPI通讯方式的8倍,也就是约16Hz * 8 = 128Hz。
至于实际刷新率,还要看主控主频大小、任务调度等其他因素。
但不管怎样,为了得到尽可能快的刷新率,8080方式更适合。
由于手里的主控并不支持8080接口,于是采用GPIO进行8080的模拟。
其控制线主要有RESET复位信号、CS片选信号、DC数据/命令信号、WR写信号、RD读信号,此外还有8根数据线DB[7:0],为方便,数据线接到GPIOC[7:0]管脚上。
对GPIO操作进行如下宏定义:#define lcddev_LEDK GPIO_Pins_0#define lcddev_RESET GPIO_Pins_1#define lcddev_CS GPIO_Pins_2#define lcddev_DC GPIO_Pins_3#define lcddev_WR GPIO_Pins_4#define lcddev_RD GPIO_Pins_5#define LCD_TE GPIO_Pins_6#define LCD_LEDK_H GPIO_SetBits(GPIOA, lcddev_LEDK)#define LCD_LEDK_L GPIO_ResetBits(GPIOA, lcddev_LEDK)#define LCD_RESET_H GPIO_SetBits(GPIOA, lcddev_RESET)#define LCD_RESET_L GPIO_ResetBits(GPIOA, lcddev_RESET)#define LCD_CS_H GPIO_SetBits(GPIOA, lcddev_CS)#define LCD_CS_L GPIO_ResetBits(GPIOA, lcddev_CS)#define LCD_DC_H GPIO_SetBits(GPIOA, lcddev_DC)#define LCD_DC_L GPIO_ResetBits(GPIOA, lcddev_DC)#define LCD_WR_H GPIO_SetBits(GPIOA, lcddev_WR)#define LCD_WR_L GPIO_ResetBits(GPIOA, lcddev_WR)#define LCD_RD_H GPIO_SetBits(GPIOA, lcddev_RD)#define LCD_RD_L GPIO_ResetBits(GPIOA, lcddev_RD)#define LCD_TE_In GPIO_ReadInputDataBit(GPIOA, lcddev_TE)首先进行GPIO初始化,全部配置为推挽输出:static void LCD_GPIO_Init(void){GPIO_InitType GPIO_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2PERIPH_GPIOA|RCC_APB2PERIPH_GPIOC, ENABLE);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT_PP;GPIO_InitStruct.GPIO_MaxSpeed = GPIO_MaxSpeed_50MHz;GPIO_InitStruct.GPIO_Pins = lcddev_LEDK | lcddev_RESET | lcddev_CS | lcddev_DC | lcddev_WR | lcddev_RD;GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_SetBits(GPIOA, lcddev_LEDK | lcddev_RESET | lcddev_CS | lcddev_DC | lcddev_WR | lcddev_RD);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT_PP;GPIO_InitStruct.GPIO_MaxSpeed = GPIO_MaxSpeed_50MHz;GPIO_InitStruct.GPIO_Pins = GPIO_Pins_0 | GPIO_Pins_1 | GPIO_Pins_2 | GPIO_Pins_3 | GPIO_Pins_4| GPIO_Pins_5 | GPIO_Pins_6 | GPIO_Pins_7;GPIO_Init(GPIOC, &GPIO_InitStruct);GPIO_SetBits(GPIOC, GPIO_Pins_0 | GPIO_Pins_1 | GPIO_Pins_2 | GPIO_Pins_3 | GPIO_Pins_4| GPIO_Pins_5 | GPIO_Pins_6 | GPIO_Pins_7);}然后需要写ST7789V寄存器进行配置。
51单片机模拟 SPI 总线的方法
51单片机模拟 SPI 总线的方法1 引言SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
由于SPI系统总线一共只需3~4位数据线和控制即可实现与具有SPI总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
由此可见,在MCS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
2 SPI总线的组成利用SPI总线可在软件的控制下构成各种系统。
如1个主MCU和几个从MCU、几个从MCU 相互连接构成多主机系统(分布式系统)、1个主MCU和1个或几个从I/O设备所构成的各种系统等。
在大多数应用场合,可使用1个MCU作为控机来控制数据,并向1个或几个从外围器件传送该数据。
从器件只有在主机发命令时才能接收或发送数据。
其数据的传输格式是高位(MSB)在前,低位(LSB)在后。
SPI总线接口系统的典型结构。
当一个主控机通过SPI与几种不同的串行I/O芯片相连时,必须使用每片的允许控制端,这可通过MCU的I/O端口输出线来实现。
但应特别注意这些串行I/O芯片的输入输出特性:首先是输入芯片的串行数据输出是否有三态控制端。
单片机IO口模拟SPI四种模式的程序
单⽚机IO⼝模拟SPI四种模式的程序#include "iom8535v.h"#define _CPOL 1#define _CPHA 0#define SCK_IO DDRA|=0X01#define MOSI_IO DDRA|=0X02#define MISO_IO DDRA&=0XFB#define SSEL_IO DDRA|=0X08#define SCK_D(X) (X?(PORTA|=0X01):(PORTA&=0XFE))#define MOSI_D(X) (X?(PORTA|=0X02):(PORTA&=0XFD))#define SSEL_D(X) (X?(PORTA|=0X08):(PORTA&=0XF7))#define MISO_I() (PINA&0X04)void delay(){unsigned char m,n;for(n=0;n<5;n++);for(m=0;m<100;m++);}void SPI_Init(void){SCK_IO ;MOSI_IO ;MISO_IO ;SSEL_IO ;SSEL_D(1);MOSI_D(1);#if _CPOL==0SCK_D(0);#elseSCK_D(1);#endif}#if _CPOL==0&&_CPHA==0 //MODE 0 0void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}SCK_D(0);}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(0);return dat;}#endif#if _CPOL==1&&_CPHA==0 //MODE 1 0 void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}SCK_D(1);}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(1);return dat;}#endif#if _CPOL==0&&_CPHA==1 //MODE 0 1 void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(0);for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(0);return dat;}#endif//////////////////////////////////////////////////////////////////////////////////////////////////////////////#if _CPOL==1&&_CPHA==1 //MODE 1 1 void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(1);for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;SCK_D(0);for(n=0;n<8;n++){ SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(1);return dat;}#endifvoid main(){SPI_Init();DDRB = 0XFF;//#if _CPOL//SCK_D(0);//#endifwhile(1){//SSEL_D(0);//SPI_Send_Dat(0x01);//SPI_Send_Dat(0x31);//SSEL_D(1);SSEL_D(0);SPI_Send_Dat(0x81);PORTB =SPI_Receiver_Dat();SSEL_D(1);//delay();}}。
Spi 通信 代码
GPIO模拟SPI总线(4线模式)原作者:heekee 添加时间:2010-05-27 原文发表:2010-05-27 人气:826---------------------------------------------------------------------------------先给大家把源代码贴上来吧,等有时间了好好整理一下。
在大家做之前,先给大家说下模拟常识。
1。
由于GPIO的相应速度有限,所以模拟的SPI速度有限,我这里大概是1.7M。
所以GPIO 模拟SPI只适合用于SPI设备控制和少量低速率数据传输。
一般,SPI可以到26M。
2。
通用性差,需要按照操作的SPI设备提供的SPI时序来模拟,不想专用SPI硬件接口,可以配置多种时序。
3。
一定要那示波器来抓取模拟的读写时序,和SPI设备手册一一对照。
/*************************************************************************//**//* FILE NAME *//* drv_spi.c *//**//* DESCRIPTION *//* This file contains the basic spi function by using GPIO. *//**//*************************************************************************/#include "target.h" // This is the GPIO define of your boardstatic u32 SPI_CS_PIN;static u32 SPI_CLK_PIN;static u32 SPI_DOUT_PIN;static u32 SPI_DIN_PIN;static u32 SPI_BUS;#define USE_SPI_BUSY_PIN 0// 20 ---> 195 KHz// 10 ---> 355 KHz#define DELAY 10void spiDelay(u16 iCount){u16 i;for(i=0;i<iCount;i++);}// SPI Internal Interface API/* -------------------------------------------------------------------------** Function : spiWrBitHigh * * Description: This function is used to transfer a High bit to SPI bus. ** Parameters : None * * Return : None * * -------------------------------------------------------------------------*/void spiWrBitHigh(void){hal_gpio_SetBit(SPI_DOUT_PIN);hal_gpio_ClrBit(SPI_CLK_PIN);spiDelay(10);hal_gpio_SetBit(SPI_CLK_PIN);spiDelay(10);hal_gpio_ClrBit(SPI_CLK_PIN);}/* -------------------------------------------------------------------------** Function : spiWrBitLow * * Description: This function is used to transfer a Low bit to SPI bus. ** Parameters : None * * Return : None * * -------------------------------------------------------------------------*/void spiWrBitLow(void){hal_gpio_ClrBit(SPI_DOUT_PIN);hal_gpio_ClrBit(SPI_CLK_PIN);spiDelay(10);hal_gpio_SetBit(SPI_CLK_PIN);spiDelay(10);hal_gpio_ClrBit(SPI_CLK_PIN);}// I2C Extern Interface API/* -------------------------------------------------------------------------*//* Function : spi_Open */ /* Description: Init SPI port. *//* Parameters : GPIO bit which defined as SPI bus. *//* Return : TRUE if OK. */ /* FALSE if Wrong. */ /* -------------------------------------------------------------------------*/bool spi_Open(u8 spi_cs,u8 spi_dout,u8 spi_din,u8 spi_clk){spi_fprintf((TSTDOUT,"init SPI ports..."));SPI_CS_PIN = 1 << spi_cs;SPI_DOUT_PIN = 1 << spi_dout;SPI_DIN_PIN = 1 << spi_din;SPI_CLK_PIN = 1 << spi_clk;SPI_BUS = SPI_CS_PIN | SPI_DOUT_PIN |SPI_DIN_PIN | SPI_CLK_PIN;//if ((SPI_BUS & USED_GPIO)!= SPI_BUS)//{// spi_fprintf((TSTDOUT, "SPI BUS is 0x%x.",SPI_BUS));// spi_fprintf((TSTDOUT, "SPI BUS is 0x%x.",USED_GPIO));// spi_fprintf((TSTDOUT, "SPI BUS is 0x%x.",(SPI_BUS & USED_GPIO)));// spi_fprintf((TSTDOUT, "SPI GPIO Used Wrong in Board Config."));// return(FALSE);//}// Set the GPIO direction of SPI interfacehal_gpio_SetOut(SPI_CS_PIN);hal_gpio_SetOut(SPI_DOUT_PIN);hal_gpio_SetOut(SPI_CLK_PIN);hal_gpio_SetIn(SPI_DIN_PIN);//hal_gpio_SetIn(SPI_BUSY_PIN);// Set the initialize status of each SPI interfacehal_gpio_ClrBit(SPI_CS_PIN);hal_gpio_ClrBit(SPI_CLK_PIN);hal_gpio_ClrBit(SPI_DOUT_PIN);return(TRUE);}/* -------------------------------------------------------------------------*//* Function : spi_Close *//* Description: Close SPI port. *//* Parameters : None */ /* Return : TRUE if OK. */ /* FALSE if Wrong. */ /* -------------------------------------------------------------------------*/bool spi_Close(void){return(TRUE);}/* -------------------------------------------------------------------------*//* Function : spi_GetData *//* Description: This function is used to Get data from SPI bus. *//* Parameters : iRecvData -- Data pointer to be stored *//* Return : TRUE if OK. */ /* FALSE if Wrong. */ /* -------------------------------------------------------------------------*/bool spi_GetData(u16 * iRecvData){s16 iCount = 0;#if USE_SPI_BUSY_PINu32 i = 0;#endif*iRecvData = 0;// Make sure that the initialize status of SPI CLK is lowhal_gpio_ClrBit(SPI_CLK_PIN);// Make sure that the initialize status of SPI DOUT is lowhal_gpio_ClrBit(SPI_DOUT_PIN);spiDelay(10);#if USE_SPI_BUSY_PINwhile (i < 0xfffff){if(hal_gpio_GetVal(SPI_BUSY_PIN) == 0) break;i++;}if(i == 0xfffff) return (FALSE);#endiffor(iCount = 15;iCount >= 0;iCount --){hal_gpio_SetBit(SPI_CLK_PIN);spiDelay(10);if(hal_gpio_GetVal(SPI_DIN_PIN)) (*iRecvData)|=(1<<iCount);hal_gpio_ClrBit(SPI_CLK_PIN);spiDelay(10);}return(TRUE);}/* -------------------------------------------------------------------------*//* Function : spi_SendData */ /* Description: This function is used to Send data to SPI bus. *//* Parameters : iSendData -- 8 bit data to be sent *//* Return : TRUE if OK. */ /* FALSE if Wrong. */ /* -------------------------------------------------------------------------*/bool spi_SendData(u8 iSendData){s8 iCount = 0;for(iCount=7; iCount>=0; iCount--){if(iSendData & (1<<iCount)) spiWrBitHigh();else spiWrBitLow();}return (TRUE);}用计算机并口模拟SPI通讯的C源程序#define LPT_PORT 0x378#define CLR_WCK(X) {X=X&(~(1<<0)); outportb(LPT_PORT,X); } // data.0 #define SET_WCK(X) {X=X | (1<<0) outportb(LPT_PORT,X); }#define CLR_BCK(X) {X=X&(~(1<<2)); outportb(LPT_PORT,X); } // data.2 #define SET_BCK(X) {X=X | (1<<2) outportb(LPT_PORT,X); }#define CLR_DATA(X) {X=X&(~(1<<3)); outportb(LPT_PORT,X); } // data.3 #define SET_DATA(X) {X=X | (1<<3) outportb(LPT_PORT,X); }#define FALSE 0#define TRUE 1void test_comm(){unsigned char datadata = 0;printf("Please press enter to begin send data\n");getch();printf("Pull down WCK data.0\n");CLR_WCK(data);getch();printf("Pull up WCK data.0\n");SET_WCK(data);getch();printf("Pull down BCK data.2\n");CLR_BCK(data);getch();printf("Pull up BCK data.2\n");SET_BCK(data);getch();printf("Pull down DATA data.3\n");CLR_DATA(data);getch();printf("Pull up DATA data.3\n");SET_DATA(data);getch();}// Note: the size of buffer to send must be dword multiple// size is the number of bytes to sendvoid short_delay(int n){int i;for(i=0;i {int temp =0;}}int send_spi_data(unsigned char *buffer, unsigned long size){unsigned char *buf=buff; unsigned char data;int i,j,k;data =0;if((size%4)!=0) return FALSE; memcpy(buff,buffer,size);do{SET_WCK(data);for(k=0;k<2;k++){for(j=0;j<2;j++){printf(".");for(i=0;i<8;i++){if((*buf)&0x80){SET_DATA(data);}else{CLR_DATA(data);}short_delay(1);// delay(1);SET_BCK(data);short_delay(1);// delay(1);CLR_BCK(data);short_delay(1);// delay(1);*buf<<=1;}buf++;size--;}// buf++;// size--;CLR_WCK(data);}SET_WCK(data);}while(size>0);return TRUE;}/*void main(){int i;tmpdata[0] = 0x34;tmpdata[1] = 0x12;tmpdata[2] = 0x56;tmpdata[3] = 0x78;// for(i=0;i<500;i++)for(i=0;i<50;i++){send_spi_data(tmpdata,4);}// test_comm();}*/运用4个普通I/O口模拟SPI程序源代码/********************************************************************函数名:uchar SpiReadWrite(uchar dat)功能:SPI发送接收一个数据说明:调用:入口参数:出口参数:***********************************************************************/ uchar SpiReadWrite(uchar dat){uchar i,temp;temp=0;SCK=0;_nop_();for(i=0;i<8;i++){if(dat & 0x80) MOSI=1;else MOSI=0;dat<<=1;SCK=1;_nop_();_nop_();_nop_();_nop_();temp<<=1;if(MISO)temp++;SCK=0;_nop_();_nop_();_nop_();_nop_();}return temp;}1、SPI总线速度:波特率可以高达5Mbps,具体速度大小取决于SPI硬件。
IO口模拟SPI主从机例程

IO口模拟spi主从机通讯例程下面这两幅图是,关于SPI数据读取或发送的时序图。
1、主机io口模拟spi通讯例程//**spi io 口初始化**//void SPI_init(void){gpio_configure_fpin(SPI_MISO, IO_TYPE_INPUT);//配置成输入模式gpio_configure_fpin(SPI_MOSI, IO_OUTPUT_1);//配置成输出模式gpio_configure_fpin(SPI_SCK, IO_OUTPUT_1); //配置成输出模式gpio_configure_fpin(SPI_CS, IO_OUTPUT_1); //配置成输出模式clr_spi_GPIO(SPI_SCK);//拉低SPI_SCKset_spi_GPIO(SPI_CS);//拉高SPI_SCKclr_spi_GPIO(SPI_MOSI);//拉低SPI_MOSI}//**主机spi读取一字节api**//unsigned char SPI_ReadByte(void){unsigned char i,rByte=0;clr_spi_GPIO(SPI_CS);for(i=0;i<8;i++){clr_spi_GPIO(SPI_SCK);//clr_spi_sck;delay_us(3);rByte<<=1;if(MISO_is_status())////M16 MISO---PB6rByte|=1;set_spi_GPIO(SPI_SCK);//set_spi_sck;delay_us(3);}clr_spi_GPIO(SPI_SCK);set_spi_GPIO(SPI_CS);return rByte;}//** 读取miso 的电平**//char MISO_is_status(void){if(red_spi_GPIO(SPI_MISO))//return 1;elsereturn 0;}//**主机spi写入一字节api**//void SPI_WriteByte(unsigned char wByte){unsigned char i;clr_spi_GPIO(SPI_CS);for(i=0;i<8;i++){clr_spi_GPIO(SPI_SCK);//delay_us(3);//if(wByte&0x80){set_spi_GPIO(SPI_MOSI);//}else{clr_spi_GPIO(SPI_MOSI);//}wByte=wByte<<1;set_spi_GPIO(SPI_SCK);//set_spi_sck;delay_us(3);//}clr_spi_GPIO(SPI_SCK);set_spi_GPIO(SPI_CS);}////////////////////////////////////////////////////////////////////////////////////注意,我写的主从机的io口对接如下主机io 从机ioSPI_MISO ------------------------- SPI_MISOSPI_MOSI --------------------------- SPI_MOSISPI_SCK --------------------------- SPI_SCKSPI_CS -------------------------- SPI_CS可能有的人对上面的io口对接的方式感到奇怪,请仔细看我对这几个io口做的初始化设置就可以明白。
介绍gpio的八种工作模式,特点及应用场景
介绍gpio的八种工作模式,特点及应用场景【标题】深入介绍GPIO的八种工作模式,揭秘特点及广泛应用场景【导言】GPIO(General Purpose Input/Output)是通用输入输出引脚的简称,它是现代电子设备中非常重要的一个接口,广泛应用于各个领域,如嵌入式系统、电子工程、物联网等。
GPIO的工作模式决定了其功能特性和应用场景的选择。
本文将全面深入地介绍GPIO的八种工作模式,探讨其特点并揭示其广泛应用场景,以帮助读者更好地理解和应用GPIO接口。
【正文】1. 输入模式输入模式是GPIO最基本的工作模式之一,用于读取外部信号的逻辑电平状态。
在输入模式下,GPIO引脚接收外界电平变化,并将其转换成对应的逻辑值,供处理器或者其他IC进行处理。
常见的应用场景包括按键输入、传感器数据采集等。
2. 输出模式输出模式是GPIO的另一个基础工作模式,用于控制外部设备的电平状态。
在输出模式下,GPIO引脚会根据处理器的指令输出相应的电平信号,驱动外部设备进行工作。
控制LED灯、驱动电机等。
3. 开漏输出模式开漏输出模式是GPIO的一种特殊输出模式,它允许多个输出引脚连接到一个电平上拉电阻上,实现共享一个信号线的目的。
开漏输出模式常用于总线通信(I2C、SPI)等场景,同时也可以用于实现外部电平转换。
4. 串行模式(UART)串行模式是GPIO的一种高级工作模式,常用于数据通信。
UART (Universal Asynchronous Receiver/Transmitter)是一种常见的串行通信协议,它通过GPIO的输入和输出引脚实现数据的发送和接收。
串行模式在无线通信、蓝牙、WiFi模块等场景中得到了广泛应用。
5. PWM模式PWM(Pulse Width Modulation)模式是GPIO的一种特殊输出模式,用于控制脉冲宽度的调节。
通过在不同时间段内改变高电平和低电平的占空比,可以控制输出引脚产生不同的平均电压或者电流,从而实现对电机速度、LED亮度等的精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一SPI协议概括
SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI (数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入
(2)SDI –主设备数据输入,从设备数据输出
(3)SCLK –时钟信号,由主设备产生
(4)CS –从设备使能信号,由主设备控制
其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。
同样,在一个基于SPI的设备中,至少有一个主控设备。
这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。
也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。
SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。
不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。
在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。
最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
AT91RM9200的SPI接口主要由4个引脚构成:SPICLK、MOSI、MISO及/SS,其中SPICLK是整个SPI总线的公用时钟,MOSI、MISO作为主机,从机的输入输出的标志,MOSI是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。
/SS是从机的标志管脚,在互相通信的两个SPI总线的器件,/SS管脚的电平低的是从机,相反/SS管脚的电平高的是主机。
在一个SPI通信系统中,必须有主机。
SPI总线可以配置成单主单从,单主多从,互为主从。
SPI的片选可以扩充选择16个外设,这时PCS输出=NPCS,说NPCS0~3接4-16译码器,这个译码器是需要外接4-16译码器,译码器的输入为NPCS0~3,输出用于16个外设的选择。
详细的SPI规范可参考SPI协议。
二GPIO模拟SPI的实现
下面将结合本人项目中的经验来详细描述如何用GPIO来模拟SPI 协议
项目中要求实现一块LCD为ssd1815br1的驱动,它与BB的通信使用SPI协议,由于BB上SPI总线已使用完,因此考虑使用GPIO来模拟实现。
GPIO对应SPI引脚的关系如下:
(1)SDO – GPIO0 (BB到LCD的数据线)
(2)SDI –无,因为暂时不需要BB接收来自LCD的数据
(3)SCLK – GPIO1
(4)CS –接地,使LCD一直处于使能状态。
接下来就是要实现SPI的协议了,SPI有4种传输模式:
开发者可根据具体设备使用的是哪种模式来实现之,我们项目种的这块LCD的模式为CPOL=1, CPHA=1.
具体实现如下:
#define SPI_DATA GPIO0
#define SPI_CLK GPIO1
void spi_write(char data)
{
int8 i = 7;
uint8 mask[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
for(; i >= 0; i--) {
gpio_out(SPI_CLK, GPIO_LOW_VALUE);
gpio_out(SPI_DATA, ((data & mask[i]) >> i));
spi_delay(10);
gpio_out(SPI_CLK, GPIO_HIGH_VALUE);
spi_delay(10);
}
}
实际上模拟SPI是很简单的事情,只要对照SPI传输模式的时序图来模拟就行了。
需要注意的是一定要有个等待时间,以使数据在
数据线上稳定下来,并使设备端有时间取数据。
刚开始调试的时候可以适当把等待时间延长一点,当调通了SPI后在降下等待时间。
我写的等待时间如下:
#define spi_delay(delay) \
{ \
register uint32 i = 0; \
while(i < delay) { \
__asm{ \
NOP; \
NOP; \
NOP; \
NOP; \
}; \
i -= 4; \
} \
}
呵呵,整个过程就是这样简单。