三相异步电机弱磁控制策略研究
异步电机直接转矩弱磁控制研究

异步电机直接转矩弱磁控制研究
在高速列车用感应电机直接转矩控制系统中,有时需要电机工作在高
于额定转速的情况,对于感应电机,可以通过弱磁控制达到比较高的速度要求。
在弱磁阶段,电机的转矩性能主要取决于电机的控制策略,其方法和基速也有所不同。
其一,在弱磁范围内不是恒转矩调速,而是恒功率调节; 其二,在弱磁范围内,都是全电压工作,没有零电压状态,工作电压在整个区段中起作用。
传统的直接转矩控制弱磁方法是在弱磁区将定子磁链参考值与转速成反
比变化。
定子磁链参考值的过高过低,都会导致输出转矩的下降。
传统的弱磁
方法不能在已有的限制条件下获得电机的最大转矩输出能力[ 2] 。
文献[ 3] 提出了基于电压闭环控制的弱磁方法,是基于转子磁链定向的方案,不适合于定子磁链定向的方案。
文献[4] 提出了最大转矩弱磁控制算法,但是其算法过多的依赖于电机参数,如电机电阻、漏感和互感,这些参数都有可能影响弱磁的性能。
文献[ 5] 提出了鲁棒弱磁控制算法,但是只针对转子磁链进行给定的,而且对于一些低惯性的电机很难取得很好的电机性能。
越来越多的研究正在向定子磁场定向方面进行转移,电机的性能受电机
参数的影响很小,定子磁链相对于转子磁链易观测。
论文在深入分析异步电机
直接转矩控制系统弱磁控制原理的基础上,提出了一种弱磁控制策略,保证升
速过程中输出最大转矩,实现快速升速。
并通过仿真研究进行验证。
1 异步电机的数学关系
定子磁链下的电机方程如下所示:
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
弱磁控制原理与控制方法个人总结

弱磁控制原理与控制方法个人总结
弱磁控制原理是一种通过控制电机的磁场强度来控制转速的方法。
传统的电机控制方法是通过改变电压或电流来控制转速,但这种方法会导致电机产生大的电磁力,造成机械振动和噪音。
弱磁控制原理的核心是通过控制电机磁场的强度来控制转速。
电机磁场的强度与电流成正比,所以通过降低电流来降低磁场的强度,可以实现弱磁控制。
弱磁控制可以减小电机的电磁力,降低机械振动和噪音。
弱磁控制方法一般包括两个步骤:首先,通过调节电机的电流来减小磁场的强度;其次,通过控制器监测电机转速的反馈信号,根据设定的转速和转速误差调整电流。
这样,可以实现电机的闭环控制,使其稳定运行在设定的转速范围内。
弱磁控制方法相对于传统的控制方法有很多优点。
首先,可以降低机械振动和噪音,提高电机的稳定性和可靠性。
其次,可以减少能耗,节省能源。
再次,可以提高电机的寿命,减少维护和更换的成本。
然而,弱磁控制方法也存在一些局限性。
首先,需要复杂的控制器和算法来实现闭环控制,增加了系统的复杂度和成本。
其次,弱磁控制方法只适用于某些特定的应用场景,对电机性能要求较高。
综上所述,弱磁控制原理和方法是一种有效的控制电机转速的方法,可以降低机械振动和噪音,提高电机的性能和可靠性。
然而,弱磁控制方法也有其局限性,需要根据具体的应用场景和需求来选择合适的控制方法。
三相异步电机弱磁

三相异步电机弱磁三相异步电机弱磁控制:原理、问题与解决方案一、弱磁控制的原理三相异步电机是一种广泛应用于工业和家庭用电动机的设备。
其工作原理基于电磁感应定律,通过气隙中的磁场与转子电流相互作用产生转矩,从而驱动转子旋转。
在异步电机中,磁场是由电源电压产生的,因此调节磁通也就意味着调节电压。
然而,单独改变磁通是不可能的,因此需要采用弱磁控制来达到调速的目的。
弱磁控制主要是通过调节电机的磁通来达到调速的目的。
当电机转速升高时,反电动势也会随之增加,导致定子电流减小。
此时,如果保持电压不变,则磁通会相应减小,导致电机转速进一步升高。
为了保持电机的转速稳定,可以通过降低电源电压来减小磁通,从而实现弱磁控制。
二、弱磁控制的问题在进行弱磁控制时,电压扩展区域可能存在两个问题:过调制导致的转矩脉动和电压裕度不足导致的电机动态性能下降。
过调制是指电机在低速时产生的转矩脉动过大,这会影响电机的平稳运行。
而电压裕度不足则是指在电机高速运行时,逆变器的母线电压已经达到极限值,无法再继续升高,从而限制了电机的动态性能。
三、解决方案为了解决这些问题,通常会通过降低异步电动机的磁链来实现弱磁控制。
降低磁链可以减小反电动势,从而降低定子电流和转矩脉动。
此外,电机的运行状态主要受限于逆变器的母线电压与逆变器所能承受的最大电流。
因此,需要进行相关的技术控制,使电机的运行状态束缚在有限的范围内,同时又能满足转矩和转速的输出需求。
四、总结三相异步电机弱磁控制是电机调速中的一种重要方法。
通过降低电源电压来减小磁通,可以实现电机的调速。
然而,在弱磁控制过程中,需要注意过调制和电压裕度不足等问题,并采取相应的解决方案来提高电机的性能和稳定性。
异步电机高性能弱磁控制的研究
Ke wo d ' s n h o o smo o ; y r s A y c r n u t r SVP M : l x we k n n ; g p e . W F u . a e i g Hi h s e d动 系 统 具 有 宽 调 速 范 围 、 快 速 响 应 、精 确 的准 停 功 能 、 高 速 和 超 高 速 运 行 等 特 点 【 。为 满 足 要 求 , 矢量 控 制 技 术 是 最 好 的控 制 方 1 j
法 ,而 间 接 矢 量 控 制 则 是其 中 最 利 于 实 时实 现 的控 制 方 案 j 。故 利 用 DS , 实 现 全 数 字 的 间接 矢 量 控 P 制 ,并 优 化 S WM 的过 调 制 策 略 ,提 高 母 线 电压 VP 利 用 率 ,同 时 对 弱 磁 区控 制 方 法 进 行 了改 进 ,提 高
摘 要 :一 种基 于 DS P的全 数 字异 步 电机弱 磁控 制 的设 计 ,系统采 用 改进 的 空 间矢量 脉 宽调制 策 略 以 实现 全数 字 化 系统 , 以及提 高母 线 电压 的利 用率 。通 过 电压 最 大化 利 用 的优化 弱 磁控 制 策略 以提 高异 步 电机 在 弱磁 区的带 载能 力 , 以及 延 长异 步 电机 恒功 率运 转 的 区 间。试验 结 果证 明该方 案 可行 ,系统 性 能达到 预 期 目标 。 关键 词 :异 步 电机 ;S WM;弱 磁 ; 高速 VP
维普资讯
兵 工 自 动 化
目动舅量与控翩
Au o a i e s r me ta d Co to tm t M a u e n n nr l c
0. . t ma i n I Au o t o
20 0 8年第 2 7卷第 6期
异步电机弱磁区转矩最大化策略

异步电机弱磁区转矩最大化策略杨阳;王庆年;龚依民;田恬【摘要】When an induction motor operates in the field weakening ranges , the output torque reduces while the speed increases .How to get the maximum torque becomes the main target .Based on the control schemeof rotor-flux-oriented, the proposed method fully exploited the machine and converter capabilities without the use of d-axis currentcontroller .Maximum torque production in a higher speed range of field weakening was achieved by stabilizing the operating point at the pullout point through the q -axis compo-nent of the current applied across the stator .Operation at the voltage limited to dynamic changes , a tem-porary voltage margin was therefore created in a dynamic condition by deviating the trajectory of stator voltage vector which improved the transient response of the system .Iron losses, which are traditionally ig-nored in the vector control scheme , increased rapidly in the high speed ranges and affected the magnitude of rotor flux and output torque .The compensation of iron losses is necessary to ensure the torque maxi-mized.Simulation and experiments results prove that the proposed scheme provides good performance on the steady-state and transient ,and get the torque maximized in the field weakening ranges .%异步电机工作在弱磁区时,转矩随着转速的升高急剧下降,在转子磁场定向系统中,充分利用电机和逆变器的最大电压、电流限制,无需d轴电流控制器,通过调节q轴分量,稳定高速失步状态,实现弱磁区转矩最大化.异步电机在电压极限状态遇到干扰时,通过旋转定子电压矢量产生动态电压边缘,提高系统的瞬态响应.当异步电机运行在弱磁区,铁损增大,影响电机的磁链水平和转矩输出,引入铁损补偿机制,确保弱磁区的转矩最大化.仿真和实验证明,该控制系统能实现异步电机弱磁区转矩最大化,且具有很强的鲁棒性.【期刊名称】《电机与控制学报》【年(卷),期】2017(021)012【总页数】9页(P51-59)【关键词】异步电机;弱磁;转矩最大化;瞬态响应;铁损【作者】杨阳;王庆年;龚依民;田恬【作者单位】吉林大学汽车工程学院,吉林长春130021;吉林大学汽车工程学院,吉林长春130021;吉林大学物理学院,吉林长春130012;吉林大学物理学院,吉林长春130012【正文语种】中文【中图分类】TM343异步电机因其结构、控制简单及其鲁棒性,使其在电机驱动系统中占据重要的地位。
三相感应异步电机在弱磁区的电流解耦控制

统,需要运用状态方程进行建模,这给系统设计和
性能分析带来了不便。
为了简化系统模型,引入复平面的矢量表示
法。定义同步坐标系下的电流和电压矢量为
“:一“:。+j“;l
(5)
《一i:。+j缘
(6)
根据式(3)~式(6)可得,复平面内矢量形式表示
的感应电机电压方程为
“:=(R:+吐。夕)《+j∞。也,《
(7)
电气传动 2008年 第38卷 第8期
EI。ECTRIC DRIVE 2008 V01.38 No.8
感应电机在弱磁区的电流解耦控制研究
刘军锋,李叶松 (华中科技大学控制科学与工程系,湖北武汉430074)
摘要:为了实现感应电机的宽范围调速,针对按转子磁场定向时,d,q轴电流的耦合效应,引入复平面矢
了■c.Il,loZogy,矾^n刀430074,HM6旧i,C施i,^口)
Abstmct:In order to implement the speed regulation in a wide range,the complex vector analysis method 、^倔s introduced aimed to the cross coupling of d,口axis current of induction motor based on rotor flux orienta— tion. The voltage—current vector model was established. The lack of decoupling of synchmnous frame PI con— troller was analyzed. A frequency function which is used to verdict stiffness of coupling was presented. A cur- rent vector controller was presented based on complex transfer functio玑 Decoupling control of current in a wide speed range can be realized dispensing with motor parameters after the controUer coefficients are deter— mined. The validity of this method has been approved by experimental results.
field_weaken 异步电机弱磁调速
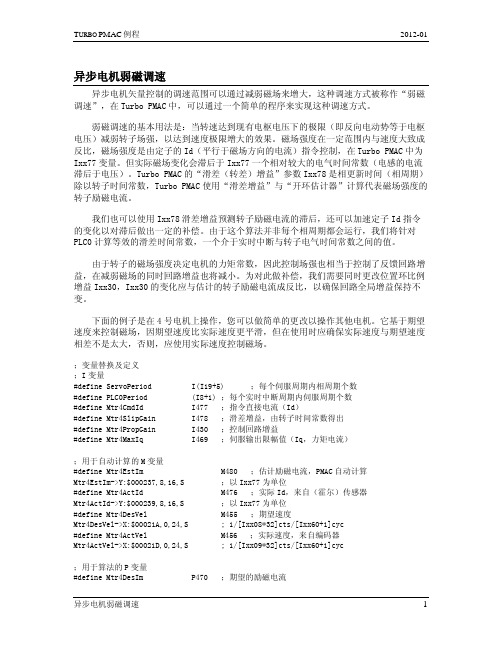
异步电机弱磁调速异步电机矢量控制的调速范围可以通过减弱磁场来增大,这种调速方式被称作“弱磁调速”,在Turbo PMAC中,可以通过一个简单的程序来实现这种调速方式。
弱磁调速的基本用法是:当转速达到现有电枢电压下的极限(即反向电动势等于电枢电压)减弱转子场强,以达到速度极限增大的效果。
磁场强度在一定范围内与速度大致成反比,磁场强度是由定子的Id(平行于磁场方向的电流)指令控制,在Turbo PMAC中为Ixx77变量。
但实际磁场变化会滞后于Ixx77一个相对较大的电气时间常数(电感的电流滞后于电压)。
Turbo PMAC的“滑差(转差)增益”参数Ixx78是相更新时间(相周期)除以转子时间常数,Turbo PMAC使用“滑差增益”与“开环估计器”计算代表磁场强度的转子励磁电流。
我们也可以使用Ixx78滑差增益预测转子励磁电流的滞后,还可以加速定子Id指令的变化以对滞后做出一定的补偿。
由于这个算法并非每个相周期都会运行,我们将针对PLC0计算等效的滑差时间常数,一个介于实时中断与转子电气时间常数之间的值。
由于转子的磁场强度决定电机的力矩常数,因此控制场强也相当于控制了反馈回路增益,在减弱磁场的同时回路增益也将减小。
为对此做补偿,我们需要同时更改位置环比例增益Ixx30,Ixx30的变化应与估计的转子励磁电流成反比,以确保回路全局增益保持不变。
下面的例子是在4号电机上操作,您可以做简单的更改以操作其他电机。
它基于期望速度来控制磁场,因期望速度比实际速度更平滑,但在使用时应确保实际速度与期望速度相差不是太大,否则,应使用实际速度控制磁场。
;变量替换及定义;I变量#define ServoPeriod I(I19+5) ;每个伺服周期内相周期个数#define PLC0Period (I8+1) ;每个实时中断周期内伺服周期个数#define Mtr4CmdId I477 ;指令直接电流(Id)#define Mtr4SlipGain I478 ;滑差增益,由转子时间常数得出#define Mtr4PropGain I430 ;控制回路增益#define Mtr4MaxIq I469 ;伺服输出限幅值(Iq,力矩电流);用于自动计算的M变量#define Mtr4EstIm M480 ;估计励磁电流,PMAC自动计算Mtr4EstIm->Y:$000237,8,16,S ;以Ixx77为单位#define Mtr4ActId M476 ;实际Id,来自(霍尔)传感器Mtr4ActId->Y:$000239,8,16,S ;以Ixx77为单位#define Mtr4DesVel M455 ;期望速度Mtr4DesVel->X:$00021A,0,24,S ; 1/[Ixx08*32]cts/[Ixx60+1]cyc#define Mtr4ActVel M456 ;实际速度,来自编码器Mtr4ActVel->X:$00021D,0,24,S ; 1/[Ixx09*32]cts/[Ixx60+1]cyc;用于算法的P变量#define Mtr4DesIm P470 ;期望的励磁电流#define Mtr4LastDesIm P471 ;上一周期期望励磁电流#define Mtr4BaseSpeed P472 ;励磁电流饱和时的最大速度(基础转速)#define BaseSpeedFrac P473 ;基础场强(减弱磁通前的磁场强度)的百分比#define Mtr4CtsPerRev P474 ;解码后编码器分辨率(这里为×4);#define Mtr4BaseRPM P475 ;空载基础转速rev/min#define Mtr4BaseKp P476 ;基础比例增益#define Mtr4BaseId P477 ;基础场强下的定子Id#define Mtr4DesId P478 ;非极限值的期望Id#define Mtr4MinIm P479 ;最小励磁电流#define Mtr4Tslip P480 ;实时中断时间/转子时间常数#define MaxIdqSqrd P481 ; Id 与Iq矢量和最大值;;设置常量(在线指令并保存,或上电、后台PLC)BaseSpeedFrac=0.9 ;基础场强的90%Mtr4BaseRPM=1800 ;空载基础速度Mtr4CtsPerRev=2000 ;500线编码器,×4解码;计算带载基础速度cts/msMtr4BaseSpeed=BaseSpeedFrac*Mtr4BaseRPM*Mtr4CtsPerRev/60000;以内部单位重新计算指令速度Mtr4BaseSpeed=Mtr4BaseSpeed*((I10*(I460+1)/8388608)*I408*32Mtr4BaseId=3000 ;低转速指令IdMtr4MinIm=1000 ;高转速指令IdMtr4BaseKp=200000 ;低转速伺服比例增益Mtr4Tslip=Mtr4SlipGain*ServoPeriod*PLC0Period ;单位用于PLCC0 MaxIdqSqrd=32767*COS(30)*32767*COS(30) ;最大矢量励磁电流OPEN PLCC 0 CLEAR;基于速度计算转子期望励磁电流IF (ABS(Mtr4DesVel) < Mtr4BaseSpeed)Mtr4DesIm=Mtr4BaseId ;饱和场强ELSEMtr4DesIm=Mtr4BaseId*Mtr4BaseSpeed/ABS(Mtr4DesVel) ;减弱磁场IF (Mtr4DesIm < Mtr4MinIm)Mtr4DesIm=Mtr4MinIm ;使用最小值ENDIFENDIFMtr4CmdId=(Mtr4DesIm-(1-Mtr4Tslip)*Mtr4LastDesIm)/Mtr4TslipMtr4LastDesIm=Mtr4DesIm ;保存,用于下次查询IF (Mtr4DesIm < Mtr4MinIm)Mtr4DesIm=Mtr4MinIm ;使用最小值ENDIFMtr4MaxIq=SQRT(MaxIdqSqrd-Mtr4CmdId*Mtr4CmdId) ;Iq限制IF (Mtr4EstIm < 0.98*Mtr4BaseId) ;减弱磁场?Mtr4PropGain=Mtr4BaseKp*Mtr4BaseId/Mtr4EstIm ;增加增益用于补偿ELSEMtr4PropGain=Mtr4BaseKp ;使用基础比例增益ENDIFCLOSEInduction Motor Field WeakeningThe speed range of vector-controlled induction motors can be increased by varying the strength of the rotor field as a function of velocity, a technique commonly known as “field weakening”. In Turbo PMAC, a simple program can be used to implement this field weakening functionality. The fundamental strategy in field weakening is to reduce the strength of the magnetic field of the rotor when the velocity is high enough that the back EMF would limit the current that could be used to drive the motor. The field strength should be roughly inversely proportional to the speed in this range. The field strength is controlled through the stator direct current command value, Ixx77 for the motor, but changes are delayed by the relatively long electrical time constant of the rotor. Since Turbo PMAC’s “slip gain” parameter Ixx78 is simply the phase update time divided by the rotor time constant, Turbo PMAC uses the slip gain parameter with an open-loop estimator to calculate the estimated rotor “magnetization current”, which represents the field strength.We can also use the Ixx78 slip gain parameter here to anticipate the delays in changing the rotor magnetization current, and use it to provide “accelerated” changes to the commanded stator direct current and largely compensate for these delays. Because this algorithm does not run every phase cycle, we compute the equivalent slip time constant for PLC 0 – the ratio between the real-time-interrupt period and the rotor electrical time constant.Because the rotor’s magnetic field strength determines the motor’s torque constant, and is therefore a gain term in the overall feedback loop, weakening the field lowers the loop gain. To compensate for this, we change the position loop’s proportional gain term Ixx30 inversely to the estimated rotor magnetization current to keep the overall loop gain approximately constant.This example operates on Motor 4, but it would be simple to change it to other motors. It controls the field based on desired velocity, which has less jitter than the actual velocity measurements. This does require that the actual velocity not deviate too much from the desired velocity. If it cannot be assumed that this is true, actual velocity should be used instead.; Substitutions and definitions; I-Variables#define ServoPeriod I(I19+5) ; Phase cycles per servo cycle#define PLC0Period (I8+1) ; Servo cycles per RTI cycle#define Mtr4CmdId I477 ; Commanded direct current#define Mtr4SlipGain I478 ; From rotor time constant#define Mtr4PropGain I430 ; Controls loop gain#define Mtr4MaxIq I469 ; Servo output limit; M-variables for automatically calculated values#define Mtr4EstIm M480 ; PMAC does automaticallyMtr4EstIm->Y:$000237,8,16,S ; In units of Ixx77#define Mtr4ActId M476 ; From sensors, xformedMtr4ActId->Y:$000239,8,16,S ; In units of Ixx77#define Mtr4DesVel M455 ; Includes overrideMtr4DesVel->X:$00021A,0,24,S ; 1/[Ixx08*32]cts/[Ixx60+1]cyc#define Mtr4ActVel M456 ; From sensorMtr4ActVel->X:$00021D,0,24,S ; 1/[Ixx09*32]cts/[Ixx60+1]cyc; P-variables for algorithm#define Mtr4DesIm P470 ; Desired rotor mag current level#define Mtr4LastDesIm P471 ; Last cycle’s desired level#define Mtr4BaseSpeed P472 ; Max speed for full mag current#define BaseSpeedFrac P473 ; % of base to start weakening#define Mtr4CtsPerRev P474 ; Encoder res after decode ;#define Mtr4BaseRPM P475 ; No-load base speed in rev/min#define Mtr4BaseKp P476 ; Ixx30 prop gain below base#define Mtr4BaseId P477 ; Ixx77 direct current below base#define Mtr4DesId P478 ; Desired Id before limits#define Mtr4MinIm P479 ; Minimum Im value#define Mtr4Tslip P480 ; T(RTI)/T(rotor)#define MaxIdqSqrd P481 ; Sqr of max vect mag of Id & Iq ;; Set constants (on-line and SAVE, or in power-on or background PLC) BaseSpeedFrac=0.9 ; Start weakening at 90% of base Mtr4BaseRPM=1800 ; No-load base speedMtr4CtsPerRev=2000 ; 500-line encoder, x4 decode; Calculate loaded base speed, first in cts/msecMtr4BaseSpeed=BaseSpeedFrac*Mtr4BaseRPM*Mtr4CtsPerRev/60000; Now re-calculate in internal units of commanded velocityMtr4BaseSpeed=Mtr4BaseSpeed*((I10*(I460+1)/8388608)*I408*32Mtr4BaseId=3000 ; Command Id at low speedsMtr4MinIm=1000 ; Command Id at highest speeds Mtr4BaseKp=200000 ; Servo prop gain at low speedMtr4Tslip=Mtr4SlipGain*ServoPeriod*PLC0Period ; In units for PLCC 0 MaxIdqSqrd=32767*COS(30)*32767*COS(30) ; Max current vec mag OPEN PLCC 0 CLEAR; Compute desired rotor mag current based on speedIF (ABS(Mtr4DesVel) < Mtr4BaseSpeed)Mtr4DesIm=Mtr4BaseId ; Full field strength ;ELSEMtr4DesIm=Mtr4BaseId*Mtr4BaseSpeed/ABS(Mtr4DesVel) ; Weakened field IF (Mtr4DesIm < Mtr4MinIm)Mtr4DesIm=Mtr4MinIm ; Use minimum valueENDIFENDIFMtr4CmdId=(Mtr4DesIm-(1-Mtr4Tslip)*Mtr4LastDesIm)/Mtr4TslipMtr4LastDesIm=Mtr4DesIm ; Save for next scanIF (Mtr4DesIm < Mtr4MinIm)Mtr4DesIm=Mtr4MinIm ; Use minimum valueENDIFMtr4MaxIq=SQRT(MaxIdqSqrd-Mtr4CmdId*Mtr4CmdId) ; Quad current limitIF (Mtr4EstIm < 0.98*Mtr4BaseId) ; Weakened field?Mtr4PropGain=Mtr4BaseKp*Mtr4BaseId/Mtr4EstIm ; Raise gain to comp ELSEMtr4PropGain=Mtr4BaseKp ; Use standard gainENDIFCLOSE。
一种考虑负载转矩的异步电机弱磁控制策略

成正比。 即只有当电机满载 (kT = 1) 时, 逆变器才需 要利用全部的直流母线电压来输出最大转矩。 而当
电机运行在非满载工况时 (k T < 1) , 只需利用部分 直流母线电压就可输出所需的电磁转矩。
在高速弱磁区内利用电压闭环进行弱磁, 由电
机转矩系数可得电压闭环给定电压大小为
u
3 s
=
k T u s,m ax.
(1. 清华大学 电机工程与应用电子技术系, 电力系统及大型发电设备安全控制和仿真国家重点实验室, 北京 100084; 2. 株洲电力机车研究所, 株洲 412001)
摘 要: 从高速弱磁区内电动汽车对电驱动系统的实际要 求出发, 提出一种考虑负载转矩的异步电机弱磁控制策略。 该策略根据转矩指令动态调节电机转矩电流和励磁电流大 小, 既能满足宽范围调速的需要又能提高驱动系统在高速弱 磁区内的运行效率。此外, 通过对转矩电流的补偿控制, 能够 保证转矩响应的动态性能。文中介绍了该控制策略的基本原 理、控制框图和实现方法, 并进行了计算仿真和实验验证。计 算仿真和实验结果验证了所提出的弱磁控制策略的有效性。
(3)
令实际的转矩电流给定为Fra biblioteki3sq′= k T isq,m ax = i3sq k T ,
(4)
其中 isq,m ax 表示当前母线电压、转速下电机输出最大
转矩对应的转矩电流, 其给定方法随后详述。
励磁电流给定如图 1 所示, 基速范围内令k = 1, 弱磁区内令 k = kT , 由此可得到全速度范围内的电 压给定值。 再将此给定电压与实际电压的误差经过
电 机 运 行 在 基 速 区 和 恒 功 区 时, u sd,m ax 小 于 u lim it, P I 调节器饱和, 最大转矩电流等于其限幅值。 电机运行在降功区时, 由于受电压限制而不能输出
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第29卷第6期2011年6月水 电 能 源 科 学W ater Resour ces and P ow er V o l.29N o.6Jun.2011文章编号:1000 7709(2011)06 0172 03三相异步电机弱磁控制策略研究张海燕1,尹 赟2,宋文祥2(1.上海电机学院电气学院,上海200240; 2.上海大学机电工程与自动化学院,上海200072)摘要:基于异步电机矢量控制弱磁方法,探讨了传统1/ r 方法、考虑转矩电流分量改进型的1/ r 弱磁方法和基于电压控制策略的转矩最大化弱磁方案,并对比分析了三种弱磁策略的关键控制量的仿真波形,同时比较验证了弱磁控制策略的有效性,以供工程应用。
关键词:异步电机;矢量控制;弱磁控制;弱磁区域划分中图分类号:T M 343文献标志码:A收稿日期:2011 02 21,修回日期:2011 04 13基金项目:上海市教委重点学科基金资助项目(J51901)作者简介:张海燕(1978 ),男,工程师,研究方向为大功率交流电机变频传动和发电机静态励磁控制,E mail:haiy ok @126.co m通讯作者:宋文祥(1973 ),男,副教授,研究方向为新型电力电子变换、电机驱动控制,E mail:w xsong2003@在整个三相异步电机的运行区间,按速度可划分为基速以下和基速以上两个区域。
当电机运行在基速以下时,稳态时整个电机磁场保持恒定,输出转矩保持不变,该区间又称恒转矩调速区。
当电机运行在基速以上时,由于直流母线电压的限制与反电动势的影响,就需转子磁通随着转速的上升而下降,即所谓弱磁运行。
异步电机弱磁控制方法主要有传统的1/ r 弱磁算法[1]、考虑转矩电流分量的改进型1/ r 弱磁算法[2]、基于电压控制策略的转矩最大化弱磁控制算法[3],但这三种方法各有优缺点。
鉴此,本文基于弱磁运行限制条件[2~4]和区域划分[3],分别研究了该三种弱磁算法,并给出了相应仿真结果,比较和验证了弱磁控制策略的有效性。
1 三种弱磁方法的分析1.1 传统1/ r 弱磁算法使电机的转子磁场与转子转速 r 成反比,即使励磁电流给定信号i *s d 与转子转速成反比。
这种控制方法往往使电压提前达到饱和,限制了转速的进一步提高。
随转子转速大于异步电动机额定同步转速 base ,交叉耦合反电动势不断增大,i *s d 保持与转速成反比,能确保磁场定向条件下的同步施转d 坐标系定子电压分量v s d 不增加,但不能确保q 坐标系定子电压分量v s q 不增加,电压往往提前达到饱和,限制了转速进一步提高,同时转速动态响应变慢。
但该方法实现简单,适用于对调速范围及转速动态响应速度要求不高的场合。
1.2 考虑转矩电流分量的改进型1/ r 算法电机的输出转矩与励磁电流分量i s d 、转矩电流分量i s q 的乘积成正比,电机运行在弱磁区域,转矩的输出能力取决于i s d 和i s q 的协调控制。
而i s d 和i s q 由v s q 和v s d 决定,则转矩输出能力取决于v s q 和v s d 的协调控制。
该法通过在弱磁升速阶段改变励磁电流指令信号i *s d 平衡d 、q 轴电压分量的分配。
当将q 轴电流跟踪误差的变化引入d 轴电流并通过修正i *s d 使即使在v s q 处于限幅状态时,i s q 亦能较快地跟踪i *s q ,同时进一步改善了i s d 的跟踪特性,提高了电机转矩输出特性,使转速动态响应加快。
该算法通过减小i *s d 以改善系统的性能,但并未从根本上解决反电动势的耦合问题,也未考虑电压与电流的限制条件,使系统跟踪特性与转矩输出达不到最理想状态。
但该法简单易行、原理清晰。
1.3 基于电压控制策略的弱磁算法基于电压控制策略的系统控制结构见图1。
图2为电压控制器框图,包含两个PI 调节器:PI_1控制励磁电流i *s d 调节电机输入电压v *s d q ;PI_2控制转矩电流i *s q 调节电机d 轴输入电压v *s d ,min 为输出两个输入信号中的较小值。
该方法[3,5,6]原理清晰,转速动态响应快,调速范围宽,其显著特点是在相应运行频率下能输出最大转矩。
但由于在矢量控制的基础上增加了第29卷第6期张海燕等:三相异步电机弱磁控制策略研究图1 基于电压控制策略的弱磁控制框图Fig.1 Blo ck diag ra m o f fie ld w e ake ning co nt ro lsy s t e m ba se d o n v o lt ag e st ra t e gy图2 电压控制器框图Fig.2 Blo ck diag ram o f vo lt ag e c ont ro lle r两个PI 调节器,因而实现较复杂,增加了系统参数整定工作量。
2 仿真对比验证采用M atlab/Simulink 构建了异步电机矢量控制系统模型,并进行了弱磁仿真。
异步电机参数为:额定功率P e =4kW ,额定电流I e =10A ,额定电压V e =400V ,额定转速n e =1500r/min (对应于转子输出角频率约为157rad/s ),额定转矩T e =25.5N m ,极对数n p =2,转动惯量J =0.0131kg m 2,电机摩擦系数f =0.002985。
仿真设定条件为:0~0.04s 为电机的预励磁时间,0.04s 时刻转速阶跃给定120rad/s(约为1200r/min),0.20s 时刻给定跳变为600rad/s (约为5700r/min)。
基于IGBT 的电压型逆变器开关频率2.5kH z,直流母线电压560V 。
2.1 传统1/ r 弱磁算法图3为传统1/ r 弱磁仿真结果。
由图可看出,在0.25s 进入弱磁阶段后,控制电压v *s q很快图3 传统1/ r 弱磁仿真结果Fig.3 Simula t ion re s ult s base d o n t radit io na l 1/ r达到限幅值,控制转矩电流i *s q 的电压分量|v *s d |受到限制,无足够的电压裕量产生实际需要的足够大的转矩电流i *s q ,跟踪效果较差,转矩输出能力低。
系统运行情况与理论分析相吻合。
2.2 考虑转矩电流分量的改进型1/ r 算法图4为考虑转矩电流分量的改进1/ r 弱磁仿真结果。
由图4(a)可看出,进入弱磁后,即使v *s q 一直处于限幅状态,|v *s d |亦随频率的增加而增加,便有足够的电压裕量产生转矩电流分量i *s q ,转矩电流能较好地跟踪上给定,提高了转矩输出能力,加快了转速动态响应速度。
表明采用改进型1/ r 弱磁算法可实现对dq 轴电压合理分配,改善了传统1/ r 方法中转矩电流跟踪性能。
图4 考虑转矩电流分量的改进型1/ r 弱磁仿真结果Fig.4 Simulat io n re sult s ba se d o n impro v e d 1/ r2.3 基于电压控制策略的弱磁算法基于电压控制策略的转矩最大化弱磁仿真结果见图5。
考虑了弱磁时电压与电流的限制条件,因而在弱磁区域控制电压|v *s d |、v *s q 不会达到限幅值。
由图可看出,进入弱磁运行后,v *s q 增加到限幅值后开始减小,同时|v *s d |一直增加。
当|v *s d |=v *s q 后,便进入了弱磁区域2阶段,在转速达到给定前维持|v *s d |=v *s q ,转矩输出为运行频率下的最大值,因而转速动态响应加快。
仿真结果与理论分析完全吻合。
2.4 结果与分析由上述三种弱磁方法的仿真结果可看出: 基于电压控制策略的转矩最大化弱磁方法转速动态响应最快,达到给定转速时间比传统1/ r 方法快0.3s,比改进型1/ r 方法约快0.15s 。
在同频率下电机输出转矩方面,基于电压控制策略的173图5 基于电压控制策略的转矩最大化弱磁仿真结果Fig.5 Simula t ion re s ult s bas ed o n vo lt a ge s t ra t eg y转矩最大化弱磁方法比传统1/ r 法提升将近30%,比改进型提升近5%。
基于电压控制策略的功率输出最大,在较大范围内保持恒功率输出。
需说明的是,由于仿真中电机模型存在摩擦系数f ,所以高速稳态运行时电磁转矩不为零。
3 结语在矢量控制条件下,分析和仿真研究了三种弱磁控制策略,发现传统1/ r 法简单易行,但转速动态响应慢,不适合宽调速范围场合;改进型的1/ r 算法实现简单,动态响应速度较快,但输出转矩并非同频率下的最大值;基于电压控制策略的转矩最大化弱磁控制方法,系统调节较繁琐,但动态响应快,同时在运行频率下输出转矩能达到相应最大值,适合于调速范围和动态响应要求较高的场合。
参考文献:[1] XU Xing yi.Selecting the F lux Reference fo r Inductio n M achine Dr ives in the Field W eakening Region [J].IEEE T ransactions on Industr y A pplicatio ns,1992,28(6):1353 1358.[2] 王彬杰.感应电机弱磁控制技术研究[D ].武汉:华中科技大学,2007.[3] 阮毅,陈伯时.电力拖动自动控制系统 运动控制系统(第4版)[M ].北京:机械工业出版社,2009.[4] 刘军锋,李叶松.感应电机在弱磁区的电流解耦控制研究[J].电气传动,2008,38(8):24 27.[5] 樊扬,瞿文龙,陆海峰,等.一种考虑负载转矩的异步电机弱磁控制策略[J].清华大学学报(自然科学版),2009,49(4):473 476.[6] Harnefors L,Pietilainen K,Gertmar L.Torque M ax imizing F ield Weakening Control:Design,A nalysis,and P arameter Selection [J].IEEE Transactions on In dustrial Electronics,2001,48(1):161 168.S tud y of Field weakening Control S trategies for Three phase Asynch ronou s MotorsZH ANG H aiy an 1,YIN Yun 2,SONG Wenx iang2(1.Elect rical Co llege,Shanghai D ianji U niv ersity ,Shang hai 200240,China; 2.School of M echatro nics Engineer ing andA uto mation,Shanghai U niversit y,Shanghai 200072,China)Abstract:Based on the v ect or field weakening co ntr ol algo rithm fo r asynchr onous electr ic machines,this paper dis cusses the maximum to rque field w eakening scheme by impro ved 1/ r met ho d w ith co nsider ing the to rque current compo nent and vo ltag e co nt rol st rateg y.A nd then the simulation wav efor ms of the key co ntr ol v ariables fo r three kinds o f field weakening contro l methods ar e comparat ive analysis.F ina lly,the r esults show that t he field w eakening contro l st rateg y is effective for pr oject a pplicat ions.Key words:asy nchro no us elect ric machines;vector contro l;f ield weakening contr ol;field w eakening reg ion divisio n(上接第179页)Numerical Prediction of C oupling Effects on Multi layered Shielding CablesYAN Yujie,XU Rong yu,LIU Gang(W uhan Seco nd Ship D esign and Research Institut e,Wuhan 430064,China)Abstract:A iming at the cable coupling phenomenon in engineering ,the elect romag net ic coupling effects on the multi layer ed shielding cables ar e discussed w it h the multi conductor transmission lines metho d.It fo rmulates an equiv alent cir cuit mo del,which describes the coupling effects on multilayer ed shielding cable.T he effects o f induct ive coupling and ca pacitiv e coupling ar e analy zed.Based o n this model,the multilayered shielding cable's amplitude fr equency r esponse o f cr osstalk v olt age inspired by near cable is simulated.T he results show that the co upling inter ference co uld be eliminated mostly by using double lay ered shielding method co mpar ing to the sing le layer ed shielding metho d.Key words:electro magnetic compatibility;cable;mult i lay ered shielding ;co upling ;pr ediction174 水 电 能 源 科 学 2011年。