基于通用学习网络的大滞后系统控制
基于PLC的单神经元PID控制器的设计与实现
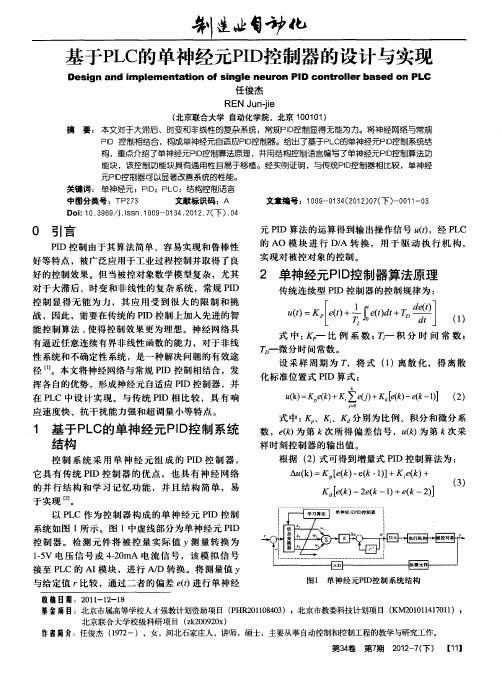
( 北京联合大学 自动化学 院 ,北京 1 O O ) O l 1 摘 要 : 本文对于大滞后 、时变 和非线性的复杂系统 ,常规PI控制显得无 能为 力。将神 经网络与常规 D PD 控制相结合 ,构成单神 经元自适应PD 制器 。给 出了基于P C的单神经元PD I I控 L I控制系统结
构 ,重点介绍了单神经 元PD I 控制算法原理 ,并用结构控制语言编写 了单神经元P 控制算法功 I D 能块 ,该控制功 能块具有通用性且易于移植 。经 实例证 明 ,与传统PD I控制器相比较 ,单神经 元PD I控制器可以显著改善 系统的性能。
关键词 : 单神经元 ;PD;P C;结 构控 制语言 I L
的 并 行 结构 和 学 习 记忆 功 能 ,并 且 结 构 简 单 , 易 于 实现 。 以 P C作 为 控 制 器构 成 的 单 神 经 元 P D控 制 L I
样 时刻控 制器 的输 出值 。
根据 ()式可得 到增 量式 PD 控制 算法 为 : 2 I
A () uk :K。 () ek一)+K e ) [ 一 ( 1] ( + P
‘
,
() 3
K lk一 e —) e 一 ) d ( 2( 1+ ( 2J e) k k
系统 如 图 1 所示 。图 1中虚线 部分 为单 神经 元 P D I
控 制 器 。检 测 元 件 将 被 控 量 实 际值 Y测 量 转 换 为 15 电 压 信 号 或 42 mA 电 流 信 号 ,该 模 拟 信 号 -V —0
北京联 合大学校级科研项 目 (k 0 9 0 ) z 2 0 2 x 作者简介:任俊杰 (9 2 17 -),女 ,河北石家庄人,讲师 ,硕士 ,主要从事 自动控制和控制工程的教学与研究工作。
先进控制技术综述

先进控制技术综述1 引言在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。
对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果。
面对这些复杂的工业控制产生了新的控制策略,即先进控制技术。
先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法。
本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点[1]。
2 自适应控制自适应控制的思想是对于系统中的不确定性,以及控制任务的艰巨性,对于部分未建模的动态特性、变化的被控对象和干扰信号,及时地测得它们的信息,并根据此信息按一定的设计方法,自动地做出控制决策、修改控制器结构和参数,使其控制信号能够适应对象和扰动的动态变化,在某种意义上达到控制效果最优或次优。
2.1 自适应控制介绍目前自适应控制的种类很多,从总体上可以分为三大类:自校正控制、模型参考自适应控制和其他类型的自适应控制。
自校正控制的主要问题是用递推辨识算法辨识系统参数,根据系统运行指标来确定调节器或控制器的参数。
其原理简单、容易实现,现已广泛地用在参数变化、有迟滞和时变过程特性,以及具有随机扰动的复杂系统。
自校正控制系统的一般结构图如图1所示。
自校正控制适用于离散随机控制系统[2]。
图1 自校正控制结构图模型参考自适应控制,利用可调系统的各种信息,度量或测出各种性能指标,把模型参考自适应控制与参考模型期望的性能指标相比较;用性能指标偏差通过非线性反馈的自适应机构产生自适应律来调节可调系统,以抵消可调系统因“不确定性”所造成的性能指标的偏差,最后达到使被控的可调系统获得较好的性能指标的目的。
模型参考自适应控制可以处理缓慢变化的不确定性对象的控制问题。
由于模型参考自适应控制可以不必经过系统辨识而度量性能指标,因而有可能获得快速跟踪控制。
模型参考自适应控制结构框图如图2所示,模型参考自适应控制一般用于确定性连续控制系统。
自适应网络控制技术的研究及应用
自适应网络控制技术的研究及应用随着互联网规模的不断扩大和人们对互联网服务的高度依赖,网络控制技术的研究和应用越来越受到重视。
自适应网络控制技术是一种能够根据网络状况和用户需求自动调整网络参数的技术,能够提高网络的性能和可靠性,受到了广泛的关注。
一、自适应网络控制技术的概念和发展历程自适应网络控制技术是指,在网络服务的运行中,根据网络状况和用户需求,自动调节网络参数,实时匹配并提供最优的网络服务。
该技术起源于上个世纪70年代,那时主要用于工业自动化控制领域。
随着计算机网络的不断发展和普及,自适应网络控制技术也逐渐应用于计算机网络领域。
经过多年的发展,自适应网络控制技术已成为网络管理的一个重要组成部分。
二、自适应网络控制技术的具体实现方式自适应网络控制技术的实现需要依靠多种技术手段,例如数据采集、数据分析、模型建立和控制算法。
具体来说,自适应网络控制技术主要包括以下几个方面:1.数据采集:收集网络中的各种信息,如带宽、延迟、丢包率等。
2.数据分析:对采集到的数据进行处理和分析,以获得网络状况的真实反映。
3.模型建立:根据数据分析结果,建立网络性能模型,用于后续的控制决策。
4.控制算法:根据模型结果,采用不同的控制算法,自适应地调整网络参数以提高网络性能。
三、自适应网络控制技术的应用自适应网络控制技术在现实生活中已经得到广泛的应用。
1. 网络优化:自适应网络控制技术能够通过动态调节网络参数,优化网络性能,提高网络响应速度和传输效率,从而提升用户体验。
2. 负载均衡:自适应网络控制技术可以调整网络负载均衡,保持网络流量的平衡,提高网络服务的可靠性和稳定性。
3. 安全防护:自适应网络控制技术可以监控网络流量,及时发现各种攻击行为,提升网络安全性。
4. 资源管理:自适应网络控制技术可以对网络资源做出自动的优化调整,从而实现资源的最大化利用。
四、自适应网络控制技术存在的问题及未来发展方向尽管自适应网络控制技术已经在很多领域得到应用,但还有一些问题有待解决,包括:1. 数据采集的准确度和实时性:网络数据集成过程中,需要保证数据采集的准确度和实时性,以便提供更精准的决策服务。
基于神经网络的闭环控制学习算法
基于神经网络的闭环控制学习算法一、神经网络在闭环控制中的应用概述神经网络作为一种强大的机器学习模型,其在闭环控制系统中的应用日益广泛。
闭环控制系统,又称为反馈控制系统,是指系统输出与期望输出之间存在反馈回路的控制系统。
在这种系统中,控制算法根据系统输出与期望输出之间的误差来调整控制输入,以达到控制目标。
神经网络因其出色的非线性映射能力和自适应学习能力,在处理复杂系统和不确定性环境中显示出了巨大的潜力。
1.1 神经网络的基本原理神经网络是由大量简单的计算单元(称为神经元)组成的网络,这些神经元通过加权连接相互连接。
每个神经元接收输入信号,进行加权求和,并通过激活函数处理后输出。
通过调整神经元之间的连接权重,神经网络可以学习到输入与输出之间的复杂映射关系。
1.2 神经网络在闭环控制中的作用在闭环控制系统中,神经网络可以用于建模、预测、控制和优化等多个方面。
它可以学习系统的动态行为,预测系统的未来状态,或者直接作为控制器来调整控制输入。
此外,神经网络还可以用于处理系统的不确定性和非线性,提高系统的鲁棒性和适应性。
二、基于神经网络的闭环控制学习算法基于神经网络的闭环控制学习算法是一类利用神经网络来实现闭环控制的算法。
这些算法通过训练神经网络来学习控制策略,以实现对系统的精确控制。
以下是几种典型的基于神经网络的闭环控制学习算法:2.1 反向传播算法(Backpropagation)反向传播算法是神经网络中最常用的学习算法之一。
它通过计算网络输出与期望输出之间的误差,并将误差反向传播至网络的输入层,以此调整网络权重。
在闭环控制系统中,反向传播算法可以用来训练神经网络控制器,使其能够根据系统误差来调整控制输入。
2.2 强化学习算法(Reinforcement Learning)强化学习是一种无模型的学习算法,它通过与环境的交互来学习最优策略。
在闭环控制系统中,强化学习算法可以使神经网络控制器通过试错来学习如何控制系统,以达到最优性能。
自动控制原理--滞后超前校正与PID校正
G s 1 T1s 1 aT2s
1 T1s 1 T2s
°
其中:
E1
1,a 1且.a 1 °
C1
R1
°
R2
E2
C2
°
Phase (deg); Magnitude (dB)
To: Y(1)
Bode Diagrams
From: U(1) 0
-5
-10
-15
-20 50
0
-50
ቤተ መጻሕፍቲ ባይዱ
10-4
10-3
10-2
应 50o 处的g 0.082 rad s,相应幅频特性为Lg 45.5db
据此,由20log KP Lg 45db 求得:KP 0.0053 。
为减少对相角裕量校正效果影响,PI控制器转折 频率 1 KI KP 选择远离g 处,取1 g 10 0.0082 rad s 求得:KI 0.000044 。于是,PI控制器传递函数
• PID调节器是一种有源校正网络,它获得了 广泛的应用,其整定方法要有所了解。
系统校正的设计方法
分析法
综合法
分析法:
选择一种校正装置
设计装置的参数
校验
综合法: 设计希望特性曲线 校验
确定校正装置的参数
期望特性综合设计方法:
1、先满足精度要求,并画出原系统Bode图; 2、根据Bode定理,系统有较大的相位裕量,幅频特性在剪切频
G( j)
1
j2T( jT 1)
63.5
0.707
二阶最佳指标:
L() -20dB/dB
1/2T
()
p % 4.3%
180°
ts (6 ~ 8)T
1/T
自动化专业毕业设计

摘要过热蒸汽温度作为工业锅炉运行中的一项重要参数,反映出设备运行的经济性和安全性,锅炉过热蒸汽温度过高或过低,都将给安全生产带来不利影响,必须严格地将温度控制在给定值附近。
锅炉过热蒸汽温度被控对象是一个多容环节,具有大延迟、大惯性以及时变性等特性,干扰因素多,属于可控性比较差的一个调节对象。
针对锅炉过热蒸汽温度的上述特点,本文在分析了锅炉过热蒸汽温度的调节任务,温度调节对象的静、动态特性,控制难点和设计原则的基础上,充分利用模糊PID控制的动态特性好和PI调节能消除静态偏差的特性,通过调整模糊PID控制器的控制规则,改善了控制系统的系能。
本文设计了一种基于AT89C52单片机的锅炉过热蒸汽温度监控系统,这种方案可大大提高锅炉工作效率和控制精度,使锅炉过热蒸汽温度按实际生产稳定在一定范围,提高锅炉工作的安全性,有助于自动化水平的提高。
并且利用单片机实现温度监控,具有成本低廉、可靠性高、结构简单等特点。
关键词:过热蒸汽;温度;模糊PID控制;单片机ABSTACTSuperheated steam temperature is an important parameter in the operate course of the industry boiler, it reflects the security and efficiency of the equipment operate. The boiler superheated steam temperature is excessively high or excessively low, will all bring disadvantage effect to the safe production, so we must control the temperature in the round of initialization. The boiler superheated steam temperature object is a mini-container element, it has a big delay characteristic and a variety model with variety time characteristic, it also has many disturbances, it belongs to a more difficult adjust object.According to the above features of boiler superheated steam temperate, this dissertation studied the application of Fuzzy-PI composite serial control in the boiler temperature system of boiler by the fully use of both the good dynamic characteristics of fuzzy PID control and eliminating static deviation of PI control on the base of analysis to the adjust mission of the boiler temperature , the static characteristics and the dynamic characteristics of the boiler temperature object, the difficulty to control it and its design principle. Then control rules of the fuzzy PID controller were adjusted, so it improves the performance of control system.This paper introduces a design based on the boiler AT89C52 SCM temperature monitoring system, this project can greatly improve the efficiency and accuracy, the boiler superheated steam temperature stables in certain scope accord to actual production, it also can improve the safety of boiler, it helps to raise the level of automation. This design is low cost, simple structure high reliability.Keywords: Superheated Steam; Temperature; Fuzzy PID Control; Single Chip目录1 绪论 (5)1.1 课题研究的背景和意义 (5)1.2 国内外研究现状 (6)1.3 本课题研究所采用的方法 (9)1.4 本论文研究的主要内容 (9)2 锅炉过热蒸汽温度控制系统的概述 (11)2.1 锅炉系统的工艺流程简介 (11)2.2 锅炉过热蒸汽温度调节的任务 (13)2.3自动控制系统的组成及框图 (14)2.4 锅炉过热蒸汽温度控制的难点及设计原则 (15)2.5串级控制系统 (16)3控制系统的设计 (18)3.1 被控对象的静、动态特性及控制参数选择原则 (18)3.1.1 被控调节对象的静态特性 (18)3.1.2 被控调节对象的动态特性 (18)3.1.3选择控制参数的原则 (18)3.2检测、变送器选择 (19)3.2.1温度传感器的选择 (19)3.2.2 A/D转换模块 (22)3.3执行器选择 (27)3.4控制器的设计 (28)3.4.1模糊控制基本原理 (29)3.4.2模糊自适应PID控制器 (30)3.4.3控制器参数自整定 (31)3.4.4控制规则的设计 (33)3.4.5采样周期的选取 (36)4控制系统的硬件设计 (38)4.1系统总体方案设计 (38)4.2系统硬件设计 (39)4.2.1 AT89C52单片机的特点 (39)4.2.2电源模块设计 (40)4.2.3 模拟信号放大模块 (41)4.2.4报警电路设计 (42)4.2.5显示电路模块 (43)5控制系统的软件设计 (45)5.1 DS18B20程序模块设计 (47)5.2 报警程序设计 (47)5.3 A/D转换程序设计 (48)5.4模糊PID参数整定设计 (50)6结论与展望 (52)参考文献 (54)致谢 (55)附录1 系统硬件原理图 (56)1 绪论1.1 课题研究的背景和意义锅炉系统是一个复杂的控制系统,它是一个多参数、多回路、非线性、大滞后、强耦合的控制系统。
基于PID控制的温度大滞后系统算法研究

文献 标志码 : A
文章 编号 :0 40 6 ( O 1 0 一 18O 1 0— 3 6 2 1 ) 1O 1一4
Re e r h o r e Ti e d l y Te s a c fLa g m - e a mpe a u e c n r li r t r - o t o lng S s e s d o D nt o g r t y t m Ba e n PI Co r lAl o ihm
第2 3卷 第 1 期 21 0 1年 3月
甘 肃 科 学 学 报
J u n lo n uS in e o r a fGa s ce c s
V0 . 3 No 1 12 . M a. 0 1 r2 1
基 于 P D控 制 的温 度大滞 后 系统 算 法 研 究 I
林 辉 常继 彬 ,
具有 时变 、 扰 动 、 大 纯滞 后 、 以建 立精 确 的数 学 模 难 型等 特性 , 往作 为大滞后 系统 的典型代 表. 具有 往 而
( . 安 铁路 职 业 技 术 学 院 , 西 西 安 1西 陕 70 1 ;. 庆 科技 学 院 , 庆 1 0 42 重 重 4 13 ) 0 制 系统 的大滞后 特点 , 采用 S t mi h预估控制 算 法进 行控制 , 此基础上提 出 了 在
种 改进 P D控 制算 法. 真结果 表 明改进 的 P D控 制算法具 有较 强的稳 定性 和 鲁棒 性 , 能有效 I 仿 I 既
LI H u CHANG i i。 N i 。 j— n b
( . 'nRa l y V c to a c n c lI si t Xi n7 0 1 , ia; 1 Xi a iwa o ain lTeh ia ntt e, ' 1 0 4 Chn u a
大滞后系统的温度控制方案

大滞后系统的温度控制方案作者:黄晨欧小雨纪倩文陈君宽郁剑来源:《科学大众》2019年第04期摘 ; 要:温度控制在冶金、电子、机械等工业领域的应用相当广泛,其对生产过程和产品质量有重大影响。
但由于温度控制系统通常具有非线性、时变、大滞后等特性,而传统的PID (比例、积分、微分)控制参数在整个控制过程中是固定的,这就使得其在较复杂的温度控制系统中作用效果较差。
文章提出一种基于BP神经网络的PID控制方法,该方法先通过BP神经网络得到一组基于ITAE指标下最优化的PID控制参数作为初始值,然后对该组PID参数进行在线调整,以达到在不同的情况下都能起到较好的温度控制效果的目的。
通过比较采用不同控制器下的仿真实验,结果表明基于BP神经网络的PID控制方法更具有效性和优势。
关键词:温度控制;BP神经网络;PID控制;大滞后随着我国科技的飞速发展,工业生产对温度控制的要求也不断提高。
在工业控制过程中,由于纯滞后的存在,使得被控对象不能及时响应系统的输入或者扰动。
为了克服大滞后的影响,现已有不少温度控制方案,如Simth预估控制,比例、积分、微分(Proportion-Integral-Differential,PID)控制、模糊控制、神经网络等,但现有的温度控制方法取得的效果并不是很理想:Simth预估控制虽能减弱纯滞后因素的影响,但其对扰动的抑制能力较差;传统PID控制对拥有大滞后、时变等特性的复杂温度控制系统的作用效果较差;模糊控制适应学习能力较弱,比较依赖人的经验。
本文以电阻炉为温控对象,结合PID控制与神经网络,通过Matlab 仿真研究,提出了一种基于误差反向传播算法(Back Propagation Neural Network,BP)神经网络的PID控制方法,该法对模型参数变化有较好的适应性,且能达到较优的控制效果,能满足工业温度控制的要求。
1 ; ;温控对象数学模型4 ; ;结语温度控制是一种具有非线性、时变、大滞后特性的系统,传统的PID控制方法不能使系统达到很好的动态性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本文中,利用通用学习网络对典型大滞后,非线性系统——PH中和过程进行辨识,对比了BP神经网络算法对大滞后系统的训练和泛化效果。
通过实验对比,得出结论,在大滞后系统模型的学习上,通用学习网络比BP神经网络要有优势。
在本课题中,我们还尝试了改变网络结构,做仿真实验对比,证明了对于复杂对象,多分支与反馈支路能够极大地改善学习效果。
与此同时,我们引入了一个常规的二阶带纯滞后对象作为补充,也对其做了仿真实验,对比了训练结果。
在对以上两个过程对象充分学习的基础上,我们设计了ULN预估控制器,同时对比了Smith预估器,常规数字增量式PID控制器的控制效果。
最后,我们还进行了控制系统鲁棒性分析,指出了,通用学习网络具有自适应,自学习等优点,系统有很强的鲁棒性能。
关键词:通用学习网络;大滞后系统;大滞后PH中和过程;预测控制算法ABSTRACTIn this paper, universal learning network(ULN) is adopted to identify the typical nonlinear and long time-delay system----PH neutralization process, and is compared with the training and generalization effect by BP neural network. Through comparing the result, we conclude, on indentifying the long time-delay system, universal learning network(ULN) than the BP neural network will have an advantage. In this topic, through changing the the network structure, comparing the simulation effect, we prove that the network with multiple branching and feedback branches can increase the training effect greatly. Meanwhile a conventional second-order system with pure lag is introduced to the simulation as a supplement, and we have made the simulation experiment for comparison. Based on the fully indentified process, we have designed a ULN predictor controller, compared with the Smith predictor and conventional incremental digital PID controller control effect. Finally, we also carry a control system robustness analysis, pointing out that universal learning network has many characteristics, such as the abilities of self-adaption and self-learning, so the system can ensure the robustness very well.Key words:universal learning network, large time-delay system, PH neutralizatoin precess with large time delay, predictive control Algorithm目录前言 (1)第1章绪论 (2)第1.1节课题来源 (2)第1.2节课题背景 (2)1.2.1大滞后回瞻 (2)1.2.2大滞后控制进展 (2)第1.3节本文主要工作及结构安排 (4)第二章神经网络基本原理 (6)第2.1节人工神经元模型 (6)第2.2节神经元网络学习方式和学习规则 (7)2.2.1神经元网络学习方式 (7)2.2.2神经元网络学习规则 (8)第2.3节 BP神经网络 (9)2.3.1 BP神经网络结构 (9)2.3.2 BP神经网络算法 (10)第2.4节通用学习网络 (13)2.4.1 通用学习网络结构 (13)2.4.2 通用学习网络算法 (14)2.4.3 通用学习网络编程思路 (15)第2.5节本章小节 (16)第三章PH中和对象仿真 (17)第3.1节 PH中和对象介绍 (17)第3.2节 PH中和对象仿真 (17)3.2.1 ULN算法仿真 (17)3.2.2 BP算法与ULN算法对比 (23)第3.3节本章小节 (25)第四章普通纯滞后系统仿真 (26)第4.1节二阶带滞后对象的介绍 (26)第4.2节二阶带滞后对象的BP和ULN训练方法比较 (26)第4.3节本章小节 (29)第五章控制方案设计 (30)第5.1节控制方案介绍 (30)5.1.1 普通增量式PID控制 (30)5.1.2 ULN预估与增量式PID控制 (31)5.1.3 Smith预估器 (32)5.1.4 基于BP算法的PID控制器 (34)第5.2节控制效果对比 (35)5.2.1 二阶纯滞后系统的控制 (35)5.2.1 PH中和过程的控制 (37)第5.3节控制系统鲁棒性研究 (39)5.3.1 PH中和Hammerstein模型控制方案的鲁棒性 (39)第5.4节本章小结 (40)结论 (41)参考文献 (42)致谢..................................... 错误!未定义书签。
前言在化工,炼油,污水处理等工业过程中,广泛地存在着大时滞现象,这也给闭环控制带来了很大的困难。
在以往的常规PID控制中,对象的非线性,大时滞会急剧地恶化控制系统的性能,比如超调量增加,调节时间延长,系统震荡加剧,甚至造成闭环系统的不稳定,这对于系统的设计与维护造成了很大的困难。
因而,如何对大滞后系统进行有效的控制,自然而然成为了控制领域的一大热点问题。
在1957年,Smith首次提出了针对时滞系统采取预估计的方法,这在理论上完成了大滞后系统控制的方案。
但是由于对被控对象参数模型的精确要求,系统鲁棒性低等局限性,限制了它在实际工程中的应用。
现如今,计算机技术飞速发展,使得现代控制方法层出不穷,比如自适应控制,智能控制等。
其中智能控制又包括专家控制,模糊控制,以及神经元网络控制等。
神经元网络具有超强的适应能力和学习能力,以及非常强的非线性表达能力,对于不确定的非线性大滞后系统非常适用,而且神经元网络控制对于干扰的抑制,系统的鲁棒性的提高都有非常不错的效果。
本文针对神经网络BP算法无法对时滞系统进行有效的训练的特点,实现了通用学习网络对滞后系统的训练和泛化。
本文对普通的二阶带纯滞后的系统以及非线性带大滞后的系统进行了仿真控制,实现了基于通用学习网络的预报控制,对比了普通PID 控制与基于BP算法的PID控制,改进了控制效果。
而仿真结果则表明,基于通用学习网络的控制在大滞后系统方面具有着非常大的优势。
第1章绪论第1.1节课题来源随着化工过程的复杂化,在过程对象的控制过程中,不可避免的会出现大滞后系统,比如温度控制,炼油等过程。
这些系统的特点是控制器的输出作用需要在一个滞后时间以后才能对系统起作用,这也就使得控制作用的效果不及时,以及被控变量不能及时地反映系统内部的变化,从而使得系统超调量明显增加,调节时间明显变长,系统震荡加剧,甚至不稳定而发散。
而系统时滞的特性使得问题变得十分复杂,因而对此类问题的研究具有非常重要的理论和实际意义。
第1.2节课题背景1.2.1大滞后回瞻(1)Smith预估器1957年,Smith首次提出了针对时滞系统采取预估计的方法。
Smith预估器能够在理论上较好的解决纯滞后系统的控制问题。
(2)Smith预估器的改进此后,其他许多学者在这一领域基础上提出了很多行之有效的方法。
,其中包括神经网络Smith预估控制[4, 15],非线性Smith预估器[5],改进的Smith预估器[2]。
1.2.2大滞后控制进展(1)自适应控制对大多数的实际系统而言,被控对象的参数不可能保持定常,对于这一类系统,如果采用常规的控制方案,不仅会使得控制效果变差,严重的甚至会造成系统的发散,然而利用自适应控制则会达到比较好的效果。
自适应控制的基本思路是依据自适应控制的“确定性等价原理”和“分离设计原则”[29] , 时变系统的控制器设计可以分为两步进行, 首先假定被控对象的参数已知且定常, 按给定的性能指标设计出相应的控制器, 然后利用参数辨识在线估计出被控对象的参数值, 并以参数估计值代替控制器中所用的真值对系统进行控制[3]。
自适应控制由于具有对时变参数的良好的自适应能力, 因而在时变时滞系统中得到了广泛的应用。
现已提出的控制方法包括模型参考自适应预估控制[29]、自适应预估最优控制[11, 13]、极点配置最优预报自校正PID控制器、大时滞系统的自抗扰控制、时滞并联自适应控制、零极点配置的自校正内模控制[28]、动态矩阵控制等等。
自适应控制的典型框图为图1-1所示。
图1·1 自适应控制系统框图(2)智能控制方法随着智能控制理论和技术的飞速发展, 许多学者将模糊控制和神经网络控制技术应用于大时滞控制系统当中。
模糊控制的优点是不需要被控对象的精确数学模型, 而且具有很强的鲁棒性, 因而非常适合于不确定性系统。
神经网络控制则具有自学习和自适应以及很强的非线性表述能力, 对于不确定的非线性时变系统非常适用。
专家系统为解决复杂的不确定性对象的控制提供了另外一条有效途径, 它以控制专家的经验和知识弥补了对象数学模型的缺陷。
智能控制方法虽然克服了预估器和自适应控制的缺陷, 但它们本身也并不是完美的。
模糊控制的显著缺点是控制精度不高、自适应能力有限、存在稳态误差、可能引起振荡。
神经网络控制的缺点是学习和训练比较费时、对训练集的要求也很高。
专家控制则过度依赖专家的经验, 缺乏自学习能力, 控制精度不高, 而且同样存在稳态误差。
鉴于上述原因, 智能控制方法经常相互融合或者和预估器以及自适应控制相结合, 这也正是时变大时滞系统控制方法目前的研究方向。