第2章雷达基本组成1共41页
低截获概率雷达
引言现代电子对抗技术,特别是反辐射导弹(ARM )技术的高速发展,是否具有反侦察能力,已经成为决定雷达系统能否完成战斗使命甚至能否继续生存的主要因素。
电子对抗设备截获雷达辐射的射频能量,并在此基础上完成对雷达的侦察、干扰,截获雷达辐射的射频信号是电子对抗设备完成侦察、干扰使命的基础。
一般雷达系统射频信号被截获的距离远大于探测目标的威力,因而只要雷达工作,辐射的射频信号就会被敌方侦察设备首先发现而实施干扰、攻击,雷达设备尚未执行战斗使命时就已丧失了战斗能力或被摧毁。
雷达发射的射频信号不被敌方截获,或在探测目标威力范围内不被敌方截获,这就是低截获概率(LPI )雷达。
LPI 雷达是一种新体制雷达,它以极低的峰值功率探测空间,完成战斗使命。
由于辐射的峰值功率极低(可达常规雷达的10-4~10-6),极大地降低了被敌方侦察设备截获的概率,可以在暴露前(隐蔽状态)探测、发现目标,完成战斗使命。
LPI 雷达是反侦察、抗干扰、抗ARM 的最有效的技术之一。
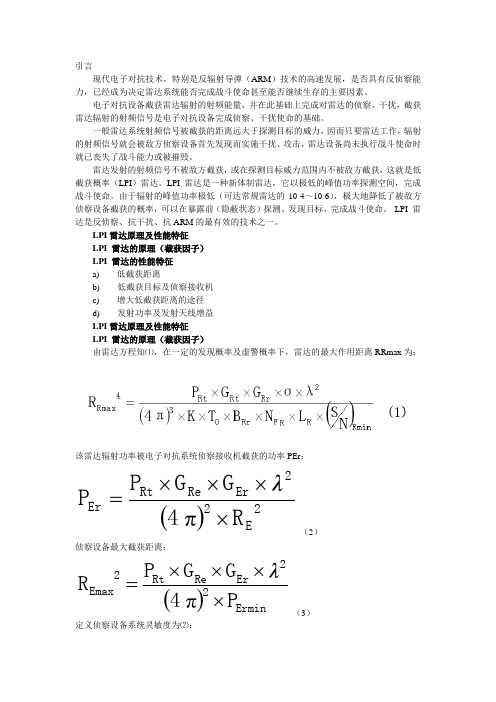
LPI 雷达原理及性能特征LPI 雷达的原理(截获因子) LPI 雷达的性能特征 a) 低截获距离b) 低截获目标及侦察接收机 c) 增大低截获距离的途径 d) 发射功率及发射天线增益 LPI 雷达原理及性能特征LPI 雷达的原理(截获因子)由雷达方程知⑴,在一定的发现概率及虚警概率下,雷达的最大作用距离RRmax 为:该雷达辐射功率被电子对抗系统侦察接收机截获的功率PEr :()2E22Er Re Rt Er R 4πλG G P P ⨯⨯⨯⨯=(2)侦察设备最大截获距离:()Ermin22Er Re Rt 2EmaxP 4πλG G P R ⨯⨯⨯⨯=(3)定义侦察设备系统灵敏度为⑵:ErErminE G P S =(4)相应地定义雷达系统灵敏度为:()RrRminR R F Rr 0R G N SL N B T K S ⨯⨯⨯⨯⨯=(5)将式(4)、(5)代入(1)中,雷达的最大作用距离RRmax 可写为:()R32Rt Rt 4RmaxS 4πλσG P R ⨯⨯⨯⨯=(6)同样,侦察设备最大截获距离可写为:()ES 4πλG P R 22Re Rt 2Emax⨯⨯⨯= (7)由(6)、(7)式得:2Rmax Rt E Re RmaxEmax R σG S G 4πR R ⨯⨯⨯⨯⨯=⎪⎪⎭⎫ ⎝⎛R S 2定义 为截获因子,并考虑到在时,有:RtReGG = RmaxEmax PR R C =σR S S 4πC 2RmaxE R 2P⨯⨯=(8)当CP <1时,截获距离小于雷达对目标的探测距离,这时雷达工作在低截获状态。
《激光雷达简介》课件

测量范围越大,激光雷达的 探测距离就越远
测量范围越小,激光雷达的 探测精度就越高
激光雷达的分辨率是指其能够分辨的最小距离或角度 分辨率越高,激光雷达的精度和探测距离就越高 分辨率受激光雷达的硬件和软件设计影响 分辨率是衡量激光雷达性能的重要指标之一
扫描速率是指激光雷达在一定时间内能够扫描的频率 扫描速率越高,激光雷达的探测范围越广 扫描速率与激光雷达的硬件性能和算法有关 扫描速率是衡量激光雷达性能的重要指标之一
发射激光:激光雷 达发射激光束,形 成光束
接收反射:激光遇 到物体后反射,被 激光雷达接收
计算距离:通过计 算发射和接收的时 间差,计算出物体 与激光雷达的距离
生成图像:通过多次 发射和接收,激光雷 达可以生成三维图像 ,用于定位和导航
自动驾驶汽车:用于感知周围环境,实现自动驾驶 智能机器人:用于导航和避障,提高机器人自主性 测绘和地理信息:用于地形测绘、城市规划等 工业自动化:用于生产线上的物体检测和定位 安防监控:用于监控区域,实现智能安防 航空航天:用于卫星导航、空间探测等
激光雷达性能指标
测量距离:激光雷达可以精确测量物体的距离,误差范围在厘米级 测量角度:激光雷达可以精确测量物体的角度,误差范围在度级 测量速度:激光雷达可以精确测量物体的速度,误差范围在米/秒级 测量分辨率:激光雷达可以精确测量物体的分辨率,误差范围在毫米级
测量范围受到激光雷达的功率、 波长、接收器灵敏度等因素的 影响
工业监控:用 于监测生产设 备、环境、人
员等
环境监控来发展 前景
自动驾驶:激光雷达是自动驾驶汽车的关键传感器,可以提供精确的3D环境信息, 提高自动驾驶的安全性和可靠性。
雷达的命令
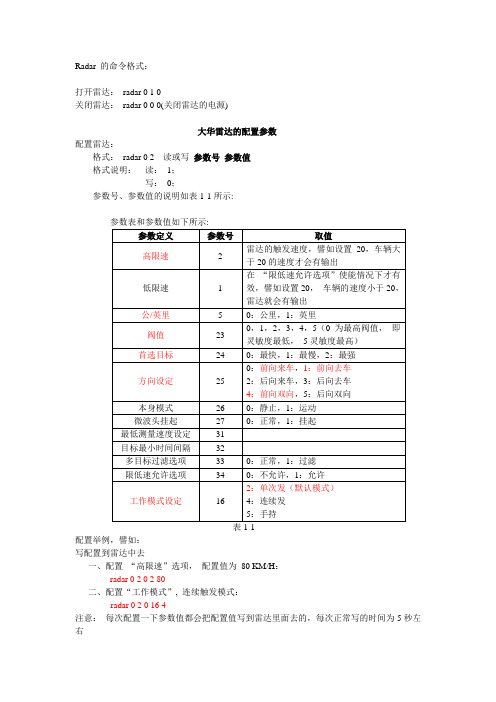
Radar 的命令格式:打开雷达:radar 0 1 0关闭雷达:radar 0 0 0(关闭雷达的电源)大华雷达的配置参数配置雷达:格式:radar 0 2 读或写参数号参数值格式说明:读:1;写:0;参数号、参数值的说明如表1-1所示:表1-1配置举例,譬如:写配置到雷达中去一、配置“高限速”选项,配置值为80 KM/H:radar 0 2 0 2 80二、配置“工作模式”, 连续触发模式:radar 0 2 0 16 4注意:每次配置一下参数值都会把配置值写到雷达里面去的,每次正常写的时间为5秒左右2、读配置:读取当前的“高限速配置”值radar 0 2 1 2 0如果当前配置的高限速值为20,返回的值是:5a 5a 5a 5a 0 37 02 01 2 14 0 (14 是16进制,转换为10进制为20) 返回值是倒数的第二个字符3、诊断雷达是否握手成功telnet 上去,敲cat /proc/kmsg:若看到“<7>radarKthread_Process : HandShake Failed “打印,表明雷达的握手失败4、查看雷达的WEB页面的配置是否配置到雷达中去敲命令吧,这个最可靠了5、有些定制化的程序,敲cat /proc/dahua/cap485, 可以看到如下的打印信息:………………………………………………………………………………….SNAP_TYPE_MODE: 0, g_coil_state = 0 , radar_sate = 0, eight: 0, nine: 0, ten: 0, eleven: 0…………………………………………….雷达与相机的电源接线注意:接雷达的时候需要注意雷达与12V电源如何接。
雷达的GND 和12V电源的GND连接在一起;雷达的正极接在相机的后面板的“C”插口下,12V的电源的正极接在后面板的“NO”插口下,如下图:川速雷达命令调试平常不抓拍时候问题排除步骤和某些参数定义一、首先确认下串口有没有中断次数递增,敲cat /proc/interrupts, 可以看到如下打印:# cat /proc/interruptsCPU00: 26121 AINTC vpfe_capture01: 26121 AINTC vpfe_capture12: 26120 AINTC dm365_h3a_aew5: 22872 AINTC DaVinciPreviewer8: 126164 AINTC davinci_osd10: 22872 AINTC IRQK_Handler12: 32 AINTC musb_hdrc16: 45744 AINTC EDMA Completion17: 134 AINTC EDMA CC Error18: 0 AINTC EDMA TC0 Error19: 5 AINTC EDMA TC1 Error26: 2098 AINTC davinci-mmc32: 1105777 AINTC clockevent33: 11 AINTC free-run counter34: 0 AINTC DelayTimer135: 0 AINTC DelayTimer239: 22487 AINTC i2c_davinci40: 3383 AINTC serial041: 1 AINTC seria1l42: 0 AINTC dm_spi44: 22957 AINTC vdirq52: 0 AINTC mac_rx_threshold53: 755 AINTC mac_rx54: 0 AINTC mac_tx55: 0 AINTC mac_misc61: 0 AINTC EDMA TC2 Error62: 0 AINTC EDMA TC3 Error41号中断(UART1)计数是否持续增加(主要是确认车检器、信号检测器等是否信号到达相机这边)40号中断(URAT0)计数是否持续增加(主要是确认雷达这边是否有信号到达相机)44号中断计数是否增加(主要是确认相机的硬件是否无误的)二、确认各个协议参数是否配置好,cat /proc/dahua/cap485 , 可以看看相关的协议是否配置正确,各协议对应的数据统计值如TEST_CAR、TEST_NEW是否有增加,相关的违法抓拍使能是否打开。
雷达测速仪工作原理

雷达测速仪工作原理
雷达测速仪是一种常用的交通工具速度测量设备,它通过使用雷达波来测量车
辆的速度。
雷达测速仪工作原理是基于多普勒效应,通过测量被测车辆的反射信号频率的变化来计算车辆的速度。
雷达测速仪主要由发射器、接收器和信号处理器组成。
发射器产生一束窄带宽
的微波信号,并将其发射出去。
这个信号会被车辆表面反射回来,并被接收器接收。
接收器接收到反射信号后,会将其与发射的信号进行比较。
由于多普勒效应的
存在,当车辆朝向雷达测速仪挨近时,反射信号的频率会比发射信号的频率高;而当车辆远离雷达测速仪时,反射信号的频率会比发射信号的频率低。
接收器会测量反射信号的频率变化,并将其转换为速度值。
这个转换过程是通
过将反射信号的频率与已知的速度频率进行比较来实现的。
根据这个比较结果,雷达测速仪可以准确地计算出车辆的速度。
为了提高测速的准确性,雷达测速仪通常会使用连续波雷达或者脉冲雷达。
连
续波雷达将持续地发射和接收微波信号,而脉冲雷达则是以脉冲的形式发射和接收信号。
两种雷达的工作原理类似,但在信号处理方面有所不同。
在信号处理器中,雷达测速仪会对接收到的信号进行滤波、放大和解调等处理。
这些处理可以提高信号的质量,并减少干扰和噪声的影响。
信号处理器还可以将测得的速度值进行显示和记录,以便交通执法人员进行查验和记录。
雷达测速仪的工作原理基于物理学原理,并经过了长期的实践验证,具有较高
的测速准确性和可靠性。
它广泛应用于道路交通管理和交通执法中,对于维护交通秩序和提高道路安全起到了重要作用。
魏青 雷达原理 -回复

魏青雷达原理-回复雷达原理是指利用电磁波的特性来探测和测量目标物体位置与速度的一种技术。
在这篇文章中,我们将会逐步介绍雷达原理,从最基本的概念到具体的工作原理和应用。
首先,让我们来了解一下雷达的基本概念。
雷达是由“Radio Detection And Ranging”(无线电探测与测距)这几个单词的首字母组成的缩写。
雷达系统通常由三个基本组件组成:天线、发射器和接收器。
天线用于发射和接收电磁波,发射器则产生电磁波并发送给目标物体,而接收器则接收目标物体反射回来的电磁波。
雷达工作的基本原理是利用电磁波在空间中传播的特性。
电磁波是由电场和磁场交替振荡而成,可分为不同波长的频段,包括无线电波、微波、红外线、可见光等。
在雷达系统中主要使用微波和无线电波。
当电磁波遇到物体时,一部分电磁波会被物体吸收、散射或反射。
雷达系统利用接收到的反射波信息来判断目标物体的位置、形状、速度等参数。
下面,我们来详细了解雷达系统的工作原理。
首先,雷达系统通过发射器发射一束电磁波,这束电磁波被称为脉冲。
发射脉冲的频率和功率取决于具体的应用场景和要求。
发射的脉冲电磁波会以近乎光速的速度在空间中传播,同时也会被目标物体吸收、散射或反射。
接下来,雷达系统通过天线接收到目标物体反射回来的电磁波。
天线接收到的电磁波信号会经过放大器放大后传输到接收器中进行处理。
接收器通过解调和滤波,将信号分离为目标信号和杂波信号。
目标信号是目标物体反射回来的电磁波信号,而杂波信号则包括天气、地形等其他干扰信号。
接收信号经过处理后,雷达系统可以通过测量信号的时间延迟来计算目标物体与雷达系统之间的距离。
这是利用电磁波在空间中传播速度恒定的特性来实现的。
雷达系统根据发射脉冲信号和接收到的目标物体反射波信号之间的时间差来计算距离。
通过测量连续的脉冲信号,雷达系统还可以获得目标物体的速度信息。
最后,让我们来看一些雷达系统的应用。
雷达技术在许多领域都得到了广泛应用。
LTD-2000 探地雷达使用手册

介简达雷地探型 0002-DTL 1.1§
。力之臂一你助域领测探标目下地的多众在会将她�点特 等”单简用使、备完能功件软统系“、”高度精测探“、”强性定稳“、”计 设式携便化型小“备具型 0002-DTL�比相达雷地探列系 DTL 的往以与。”达 雷地探 0002-DTL“的产生制研新最所我绍介你向里这在会机有兴高很
围范用应的达雷地探 0002-DTL 4.1§
�℃06+�℃04-�度温存储 � �求要 58�6.47BJG 足满�动振击冲 � �℃05+�℃01-�度温作工 � �h2 于大不�RTTM �
。�09�℃04+�件条热湿 �
� mm 57 � mm 442 � mm 633 �寸尺形外 �
�h4 于大�间时作工续连 �
13 „„„„„„„„„„ „ „ „ „ „ „ „ „ „ „ 务 服 后 售 的 品 产 D T L A 录 附
92„„„„„„„„„„„„„„ 出 输 印 打 和 辑 编 的 面 剖 达 雷 DTL 章 九 第 62„„„„„„„„„„„„„„ 价 评 程 工 的 时 测 检 路 公 于 用 DTL 章 八 第 12„„„„„ „„„ „„„„„„„ 程 过 理 处 预 据 数 达 雷 地 探 D T L 章 六 第 02 „„„„„„„„„„„„„„„„„ 装安和成组 的 统 系 件 软 0 . 5 P S D I 1 . 2 § 02 „„„„„„„„„„„„„„„„„„„„„„ 行 执 的 件 软 0 . 5 P S D I 2 . 2 § 02„„„„„ „„„„„„„„„„„„ 行 执 和 装 安 的 0 . 5 P S D I 件 软 章 五第
言 前
moc.rpg-dtl.www�站网
毫米波雷达系统手册
毫米波雷达系统手册
毫米波雷达系统是一种利用毫米波段的电磁波探测目标的传感器系统。
相比于其他传感器,毫米波雷达具有高精度测距、全天候工作、抗干扰能力强等优点,因此在无人驾驶、智能交通、安防监控等领域得到了广泛应用。
一、毫米波雷达工作原理
毫米波雷达通过发射高频电磁波,并接收目标反射回来的回波信号,利用信号处理技术提取出目标的距离、速度、角度等参数。
其工作原理可以分为发射、接收、信号处理三个主要部分。
二、毫米波雷达系统组成
毫米波雷达系统主要由天线、射频前端、数字信号处理器、微控制器等部分组成。
其中,天线负责发射和接收电磁波;射频前端负责将发射信号进行调制,并将接收到的回波信号进行解调;数字信号处理器负责对回波信号进行处理,提取出目标的参数;微控制器负责控制整个系统的运行。
三、毫米波雷达主要参数
1. 频率范围:毫米波雷达的频率范围一般在24GHz~77GHz之间,不同频率的毫米波雷达具有不同的探测性能和应用场景。
2. 探测距离:毫米波雷达的探测距离一般可以在0.1m~100m之间,根据不同的应用场景选择合适的探测距离。
3. 角度分辨率:毫米波雷达的角度分辨率一般可以达到±1°~±3°,可以实现对目标进行精确的方位测量。
4. 速度分辨率:毫米波雷达的速度分辨率一般可以达到±1m/s~±10m/s,可以实现对目标进行精确的速度测量。
船舶雷达知识点总结图表
船舶雷达是一种用于船舶导航和安全的重要设备。
它通过发射和接收无线电波来探测周围环境,帮助船舶避免障碍物、识别其他船只并保持安全距离。
船舶雷达的使用对于船舶的航行至关重要,因此船员需要掌握相关的知识和技能来正确操作雷达。
下面将对船舶雷达的知识点进行总结,包括雷达的工作原理、常见的雷达显示和功能、雷达的使用注意事项等内容。
一、雷达的工作原理1. 电磁波的发射和接收雷达通过发射一定频率的电磁波,然后接收并分析被目标反射回来的信号来探测目标的位置和距离。
2. 雷达回波的处理雷达系统会对接收到的回波信号进行处理,包括计算目标的距离、方位和速度,并在雷达显示器上显示出来。
3. 雷达的波束和分辨率雷达发射的电磁波是由天线发射出去的,形成一个类似于手电筒光束的范围,被称为“波束”。
雷达的分辨率取决于波束的宽度,波束越窄,分辨率越高。
二、雷达的显示和功能1. 雷达的显示器雷达显示器通常是采用脉冲波形显示,用于显示探测到的目标物体的位置、距离和方位。
2. 雷达的操作控制雷达设备通常有一系列的操作控制,包括调整雷达的灵敏度、增益、对比度等参数,以获得更清晰的目标显示。
3. ARPA和AIS功能一些先进的雷达设备具有自动雷达目标追踪(ARPA)和自动识别系统(AIS)的功能,可以自动追踪目标并显示其关键信息。
4. 雷达报警系统雷达设备通常配备有报警系统,能够在发现潜在危险或规避目标时发出声音或视觉警报提示船员。
1. 遵守雷达使用规定船舶雷达的使用需要遵守相关的法规和规定,船员需要熟悉并严格遵守这些规定。
2. 定期维护检查船舶雷达需要定期进行维护和检查,确保设备的正常运行和准确性。
3. 熟悉目标特征船员需要熟悉各种不同目标的雷达反射特征,以便正确识别和区分目标。
4. 与其他导航设备的配合雷达在船舶导航中通常需要与其他导航设备如GPS、电子海图等配合使用,船员需要掌握这些设备的协调使用方法。
以上是对船舶雷达知识点的总结,船员需要熟悉这些知识,合理使用雷达设备,保障船舶的安全航行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•现代雷达由以下基本部分构成
– 雷达发射机:Radar Transmitters – 雷达接收机:Radar Receivers – 信号处理机:Signal Processors – 数据处理机:Data Processors – 雷达天线: Radar Antennas – 指 示 器 和 显 示 器 : Radar Indicators and
Pav100201000.05kw
2、以矩形调制脉冲雷达为例: 脉宽
脉冲重复周期 T r
射频振荡信号振幅 V
射频信号最大瞬时功率: Po V 2
发发射射3机机、峰平常值均规功功脉率率冲::雷达Pa:v DPtPD t0. 0120P V1t2T r 1 2V2T r
脉冲多普勒雷达可达 102,101 ,甚至更高
§2.1 发射机
• 一、发射机主要质量指标
– 1、工作频率、波段 – 雷达频率确定是极其重要的工作,一定要根据用
途和实际需要,一旦确定,即成为整个系统之基 础,不能轻易动摇(硬件完全确定) – 雷达频率可以是一个或多个(捷变频) – 频率的选择需要权衡多种因素 a、物理尺寸 b、发射功率 c、天线波瓣宽度 d、大气衰减等等
§2.1 发射机
• b、平均功率Pav
– 脉冲重复周期内输出功率的平均值
在D 脉 T冲 r 为重工复作周比期(T r 占内空, P 比av)P ,Ttr表明Pt雷Tr达P 发t射D
时间与总时间之比(duty factor)
§2.1 发射机
• 瞬时功率、峰值功率、平均功率的关系举例
例: 1、Pt 100kw,1s,Tr2000s
30~50 100
100Βιβλιοθήκη §2.1 发射机• 信号形式(调制方式)
普通脉冲信号
规则 信号
雷达 信号 波形 分类
普通连续波信号 线性调频信号
脉冲调频信号 非线性调频信号
二相制
相位编码 多相制
脉冲编码信号 频率编码 阶梯式
随机式 调相编码
脉冲串信号
均匀脉冲串信号 加权脉冲串信号
参差脉冲串信号 频率编码脉冲串信号 重复周期参差脉冲串信号
• 在1000MHz以上则有多腔磁控管、大功率速调管、行 波管以及前向波管等。
§2.1 发射机
• 如何选择工作频率?根据任务
– a、陆基应用: – 远程警戒雷达,预警雷达:选UHF和VHF
• 例:铺路爪PAVE PAWS选在UHF波段420~ 450MHz,波长大约69厘米
– 战术雷达,炮瞄雷达:作用距离近,尺寸 不能太大,可选L,S,C波段甚至更高
力和抗干扰能力 – 定义:发射机送至天线输入端的功率。 – 与发射机输出功率有关的两个基本概念
• a、峰值功率Pt • b、平均功率Pav
§2.1 发射机
• a、峰值功率Pt(Peak Power)
– 脉冲持续期间射频振荡信号的平均功率(有效功 率)
– 注意:不是射频正弦振荡的最大瞬时功率
– 每个脉冲能量 E Pt 是脉冲宽度
§2.1 发射机
• 关于发射机的进一步说明
– 载波受调制
• 脉冲雷达 • 简单调制
§2.1 发射机
• 关于发射机的进一步说明
– 载波受调制
• 线性调制脉冲 LFM
• (linear Frequency Modulation)
• 相位编码脉冲
§2.1 发射机
• 关于发射机的进一步说明
– 大功率:不同雷达功率量级不同 – 脉冲雷达,峰值功率可达KW,MW, – 连续波雷达,几十瓦,几瓦就相当大了 – 思考一:为什么如此大功率? – 思考二:为何通常采用脉冲工作方式?
• 例:“爱国者”AN/MPQ-53工作在C波段,160个 跳频点,瞬时工作带宽4MHz,总的工作频率范围为 640MHz
§2.1 发射机
• 如何选择工作频率?根据任务
– b、舰载应用
– 尺寸不能太大,且当掠地角趋近于零度时,从目 标直接接收的回波,几乎完全被从同一目标由水 面反射回来的回波抵消(多径效应)。 广泛采用 S,X波段
连续波 D 1
§2.1 发射机
• 一、发射机主要质量指标
– 3、总效率:
• 发射机输出功率与输入功率之比
– 4、信号形式(调制方式)
雷达的常用信号形式
波形
调制类型
简单脉冲
矩形振幅调制
脉冲压缩
线性调频
脉内相位编码
高工作比多普勒
矩形调幅
调频连续波
线性调频
正弦调频
相位编码
连续波
工作比(%) 0.01~1 0.1~10
随机 信号
连续信号 采样噪声
§2.1 发射机
• 一、发射机主要质量指标
– 5、信号的稳定度和频谱纯度: – 信号的各项参数(振幅,相位,脉宽,脉冲重频)
是否随时间变化
• 时域上:振幅方差,相位方差,定时方差,脉宽方差 • 频域上:频谱纯度,雷达信号在应有的信号频谱之外
• 频率选择需要权衡的因素
– c、波束宽度:天线波束宽度正比于
L
• 为了得到窄波束 低频,天线要求较大
•
高频,天线尺寸较小
– d、大气衰减:电波通过大气时,吸收、散射
• 频率<100MHz时,大气衰减可忽略
• 频率>10GHz时, 大气衰减很严重
– 工作频率对硬件的要求
• 在1000MHz以下要采用微波三、四极管。
§2.1 发射机
• 频率选择需要权衡的因素
– a、物理尺寸 :产生和发射无线电频率功率的硬 件尺寸,一般和波长成正比
• 低频:硬件又大又重
• 高频:雷达很小
– b、发射功率:发射机合理承受功率电平的能力 受电压梯度(单位长度上电压)和散热要求限制
•
米波雷达:MW级
•
毫米波雷达:百瓦级
§2.1 发射机
– c、机载应用:
– 对尺寸限制很严,最低频段是UHF和S波段
• 例: 1、预警机 E2 :UHF波段;AWACS : S波段
•
作用距离远,天线罩巨大
•
2、无线电高度计:C波段
•
3、大部分战斗机、攻击机、侦察机雷达,工作
在X和Ku波段
§2.1 发射机
• 一、发射机主要质量指标
– 2、输出功率 – 雷达发射机中最为重要的指标,直接影响雷达威
displays
第二章 雷达基本组成
§2.1 发射机 §2.2 接收机 §2.3 天线 §2.4 显示器
§2.1 发射机
• 功能
– 产生载波受调制的某一功率(通常是大功率)射 频信号,再经馈线和收发开关由天线辐射出去。
– 一般分为连续波发射机和脉冲发射机,最常用的 是脉冲雷达发射机。
– 通常是雷达系统中最重、最费钱的一部分。