变位齿轮传动
变位齿轮中变为传动的高度变位和角变位

变位齿轮中变为传动的高度变位和角变位【摘要】变位齿轮是一种重要的传动装置,通过其结构中的高度变位和角变位实现传动的功能。
高度变位是指齿轮轴心之间的距离随着旋转变化,而角变位则是指齿轮轴线之间的夹角随着旋转变化。
这两种变位方式共同作用于传动系统中,实现了传动装置的灵活性和精准度。
高度和角变位的应用广泛,包括汽车变速箱、机器人等领域。
相较于其他传动装置,变位齿轮具有结构简单、传动平稳、传动效率高等优点。
变位齿轮在工业生产中具有重要的应用价值。
变位齿轮通过高度和角变位的方式实现传动功能,广泛应用于各个领域,为工业生产提供了便利和效率。
【关键词】变位齿轮、传动、高度变位、角变位、结构、原理、应用、优点、总结1. 引言1.1 引言变位齿轮是一种常用的传动元件,具有高度变位和角变位的特性。
高度变位是指齿轮轮齿的变化,而角变位则是指齿轮轴线的变化。
这种变位设计可以实现齿轮传动的平稳性和可靠性。
在实际应用中,高度和角变位的组合可以满足不同的传动需求,提高传动效率和传动精度。
本文将从变位齿轮的结构、高度变位原理、角变位原理、高度和角变位的应用以及变位齿轮的优点等方面进行探讨。
通过对这些内容的分析和讨论,可以更好地理解变位齿轮的工作原理和应用特点。
在工程设计和制造中,变位齿轮起着重要的作用,可以实现复杂传动系统的正常运转。
通过本文的介绍,希望读者能够对变位齿轮的相关知识有更深入的了解,为工程实践提供参考和指导。
2. 正文2.1 变位齿轮的结构变位齿轮是一种特殊的齿轮机构,其结构与普通直齿轮不同。
在变位齿轮中,齿数和模数不等的两个齿轮啮合,使得齿轮轴线的相交点在啮合中心线之上或之下,这就是变位齿轮特有的压力角变化的结构特点。
变位齿轮的结构包括两个部分:主动轮和被动轮。
主动轮齿数多,模数小,被动轮齿数少,模数大。
两者之间通过啮合连接,实现了高度和角度的变位传动。
主动轮和被动轮之间的啮合能够传递动力并实现传动的效果。
在变位齿轮的结构中,齿轮的牙廓形状也是非常重要的。
变位齿轮传动类型

变位齿轮传动类型
变位齿轮传动是一种常见的机械传动方式,它通过变位齿轮的转动来实现传递动力和转矩的目的。
变位齿轮传动可以分为内啮合和外啮合两种类型,下面将详细介绍这两种类型的特点和应用。
一、内啮合变位齿轮传动
内啮合变位齿轮传动是指变位齿轮的啮合齿轮是内齿轮,也就是说,变位齿轮的齿轮齿数比啮合齿轮的齿轮齿数小。
内啮合变位齿轮传动具有以下特点:
1.传动效率高:内啮合变位齿轮传动的传动效率比外啮合变位齿轮传动高,因为内啮合齿轮的齿数较少,摩擦损失较小。
2.结构紧凑:内啮合变位齿轮传动的结构比较紧凑,适用于空间有限的场合。
3.噪音小:内啮合变位齿轮传动的噪音比外啮合变位齿轮传动小,因为内啮合齿轮的齿数较少,啮合时的冲击力较小。
内啮合变位齿轮传动广泛应用于各种机械设备中,如工程机械、农业
机械、纺织机械等。
二、外啮合变位齿轮传动
外啮合变位齿轮传动是指变位齿轮的啮合齿轮是外齿轮,也就是说,
变位齿轮的齿轮齿数比啮合齿轮的齿轮齿数大。
外啮合变位齿轮传动
具有以下特点:
1.传动扭矩大:外啮合变位齿轮传动的传动扭矩比内啮合变位齿轮传动大,因为外啮合齿轮的齿数较多,承载能力较强。
2.结构简单:外啮合变位齿轮传动的结构比较简单,易于制造和维修。
3.适用范围广:外啮合变位齿轮传动适用于各种传动比较大的场合,如汽车变速箱、船舶传动等。
总之,变位齿轮传动是一种常见的机械传动方式,它具有传动效率高、结构紧凑、噪音小等优点,广泛应用于各种机械设备中。
在选择变位
齿轮传动时,应根据具体的传动要求和工作环境来选择内啮合或外啮
合类型。
变位齿轮传动

•
1.0
1.2 x曲22强m-线度-i0单n的;齿曲对大线啮齿;合轮与根
s1 0.25m
x2min
双sa1齿对0.啮4实0小-合m-际切的齿啮的界合限限图制 轮曲齿02.线齿的6对齿线m-0两 曲根啮-.顶。的6节端 线滑合界厚点点 。动区曲限移处系的的曲线至,数深限线双达均;度制到衡为
例1:已知变速箱中一对齿轮Z1=13, Z2=44
a a(r r), , y 0 不同之处:
ha1 (ha x1)m hf 1 (ha c x1)m
为避免发生根切,则Z 1
Z2
2Zmin
优点:减小机构的尺寸,改善磨损情况;
提高小齿轮强度,提高承载能力。
缺点: 略有下降,互换性差。
2、角度变位传动:x1 x2 0
1)正传动: x1 x2 0
0, y 0, 。
34))计校算验齿:轮sa1各, 部分(尺略寸) :d,。 db,da,d f , ha, hf , P, s,e。
例2.如图示齿轮机构 m 3、 20 、ha* 1、c*
0.25、z1 18、z2 30、z3 27、a' 71 。设
计该两对齿轮。 解:1).确定传动类型
3)满足重合度的要求
4)不干涉
选择变位系数应满足的质量方面的要求: 1)等弯曲强度;2)等磨损强度。
选择变位系数的方法:封闭图法;图表法。
1 i 1~ 1.2 3i 1.6 ~ 2.2 4 i 2.2 ~ 3.0
2 i 1.2 ~ 1.6
1234 5
X
5 i 3.0
3.0
26.50 260
3).具这体样尺三寸个计齿算轮: 齿顶缩减量相同。
例3.已知:如图示 m 16、z1 17、z2 245、
机械设计(6.14.1)--变位齿轮传动的强度计算
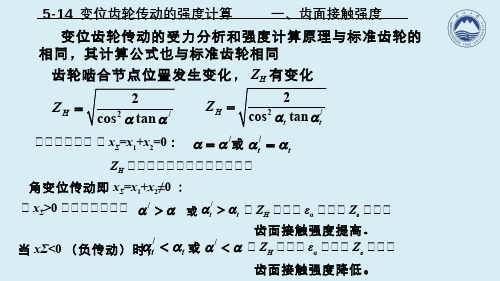
变位齿轮传动的受力分析和强度计算原理与标准齿轮的相同,其计算公式也与标准齿轮相同
齿轮啮合节点位置发生变化,Z H 有变化
2/
2cos tan H Z a a =2/2cos tan H t t Z a a =/a a =/t t a a =高高高高高高 高x Σ=x 1+x 2=0:
Z H 高高高高高高高高高高高高高
或/a a >/t t a a >/a a </t t
a a <高x Σ>0高高高高高高高高Z H 高高高εα高高高Z ε高高高
高Z H 高高高εα高高高Z ε高高高或齿面接触强度提高。
当xΣ<0(负传动)时,或齿面接触强度降低。
角变位传动即x Σ=x 1+x 2≠0 :
二、齿根弯曲强度齿根弯曲强度:
变位使齿形变化,齿根厚度和齿根圆角半径变化,引起计算系数Y Fa 和Y sa 的变化,影响齿根弯曲强度。
正变位齿轮的齿厚增大,Y Fa 减小,
齿根圆角半径减小,Y sa 增大。
正变位齿轮的齿根弯曲强度可有提高。
负变位使齿根弯曲强度降低。
变位使端面重合度系数εa 变化,Y ε也发生变化。
齿轮正变位和负变位的原理

齿轮正变位和负变位的原理
齿轮正变位和负变位是齿轮传动中的一个重要概念。
齿轮正变位是指当齿轮轴承一定的负载时,齿轮齿面的变形使齿轮传动中心距增加,齿距减小,齿侧间隙增加的现象;而齿轮负变位则是指当齿轮轴承负载减小时,齿轮齿面的变形使齿轮传动中心距减小,齿距增加,齿侧间隙减小的现象。
齿轮正变位和负变位的原理是由于齿轮齿面的变形和变位导致的。
当齿轮传动承受负载时,齿轮齿面会发生弹性变形,使齿轮齿面接触点位置发生变化,齿距和齿侧间隙也会相应发生变化。
这种变化会导致齿轮传动中心距的改变,即齿轮的轴向位置发生变化,从而引起齿轮的正变位或负变位。
齿轮正变位和负变位的大小取决于齿轮材料的弹性模量、齿轮尺寸和载荷大小等因素。
为了减小齿轮正变位和负变位对齿轮传动的影响,可以采取以下措施:选择弹性模量较小的材料、增加齿轮尺寸、提高齿轮硬度和精度等。
- 1 -。
变位齿轮传动

ha hf
作者:潘存云教授
分度圆
安徽工程科技学院专用
2)变位齿轮的齿顶高和齿根高与标准齿轮不同 齿根高: hf= ha*m+c*m-xm 齿顶高:由毛坯大小确定,若保证全齿高不变,则有: ha= (ha*+x)m 顶圆半径:ra =r+ ha =r+(ha*+x)m
安徽工程科技学院专用 作者: 潘存云教授
代入 p '= s'1+ s'2 得:
cos cos cos cos cos ' ' p s 2 r ( inv inv ) s 2 r ( inv inv ) 1 1 2 2 ' ' ' ' ' cos cos cos cos cos
变位齿轮 传动类型
正传动 x1+x2>0
负传动 x1+x2<0
1. x1+ x2=0,且x1=x2=0
标准齿轮传动(变位齿轮传动的特例) 2. x1+ x2=0,且x1=-x2≠0 等变位齿轮传动(高度变位齿轮传动) 有:a’=a y=0
ς=轮采用正变位,x1>0,大齿轮采用负变位,x2<0
安徽工程科技学院专用
两轮不产生根切的条件: x1≥ha*(zmin-z1)/zmin x2≥ha*(zmin-z2)/zmin
两式相加,设ha*=1,则有: x1 +x2≥[2zmin-( z1+ z2)]/zmin ∵ x1+ x2=0 ∴ z1+ z2≥2zmin 优缺点:
①可采用z1≤zmin的小齿轮,仍不根切,使结构更紧凑。 ②改善小齿轮的磨损情况。 ③相对提高承载能力,因大小齿轮强度趋于接近。 ④缺点:没有互换性,必须成对使用,ε
变位齿轮参数计算公式
变位齿轮参数计算公式引言变位齿轮是一种常用的齿轮传动装置,可以实现不等速传动。
在实际设计和计算中,需要了解和确定变位齿轮的参数,以便满足传动需求。
本文将介绍一些常用的变位齿轮参数计算公式,帮助读者了解和计算变位齿轮的相关参数。
1. 转速比计算公式对于一个变位齿轮传动系统,转速比是一个重要的参数,表示两轴之间的转速比例关系。
通常以N1、N2分别表示第一齿轮的转速和第二齿轮的转速。
变位齿轮的转速比计算公式如下:转速比 = (N2 - N1) / N12. 锥齿轮的齿数计算公式对于一对变位齿轮中的锥齿轮,其齿数计算公式如下:Z = (Z1 * m1) / m2其中,Z为锥齿轮的齿数,Z1为直齿轮的齿数,m1为直齿轮的模数,m2为锥齿轮的模数。
3. 螺旋角计算公式螺旋角是变位齿轮的一个重要参数,表示齿轮齿线沿轴向的倾斜角度。
对于一对变位齿轮中的螺旋齿轮,其螺旋角的计算公式如下:β = atan(tan(α) - (m2 * (Z2 - Z1)) / (2 * π * a))其中,β为螺旋角,α为压力角,m2为齿数为Z2的螺旋齿轮的模数,Z1为另一齿轮的齿数,a为啮合齿轮的轴向分度圆半径。
4. 齿面距计算公式齿面距是变位齿轮的另一个重要参数,表示两个啮合齿轮齿面上同一点之间的距离。
对于一对变位齿轮中的两个螺旋齿轮,其齿面距的计算公式如下:h = m2 * b / cos(α)其中,h为齿面距,m2为螺旋齿轮的模数,b为螺旋齿轮的齿宽,α为压力角。
5. 压力角计算公式压力角是变位齿轮设计中的一个重要参数,表示齿形曲线的锋角与轴线的夹角。
通常使用以下计算公式得到压力角的值:cos(α) = (Z1 + Z2) / (2 * m2 * a)其中,α为压力角,Z1和Z2分别为两个啮合齿轮的齿数,m2为螺旋齿轮的模数,a为啮合齿轮的轴向分度圆半径。
结论本文介绍了几个重要的变位齿轮参数计算公式,包括转速比、锥齿轮的齿数、螺旋角、齿面距和压力角的计算公式。
机械原理高级篇4章_变位齿轮传动
r2'
o2
'
2.中心距
•一对齿轮啮合传动时, 中心距等于两节圆半径 之和。 •一对无侧隙标准齿轮传 动,其分度圆与节圆重 合,啮合角等于分度圆 压力角 •标准中心距(标准齿轮 无侧隙传动中心距)
' 1 ' 2
o1
' r1
c
r2'
' 1
s e s e
' 2
o2
m 2 r ar ( z1 z2 ) 1 r 1 r 2 2
上的齿距为pi,则 该比值称为模数
di
mi
• 模数—— 人为地把 pi / 规定为一些简单的有理数,
pi
z
一个齿轮在不同直径的圆周上,其模数的大小是不同的。
p i 。
• 分度圆——— 是齿轮上一个人为地约定的轮齿计 算的基准圆,规定分度圆上的模数和压力角为标准值。
国标压力角的标准值为=20° 模数的标准系列见GB1357-87,参见表4-2。 分度圆上的参数分别用d、r、m、p、e及表示。 m越大,P愈大,轮齿愈大,抗弯强度也愈高。
• 齿轮插刀
切削运动
进给运动
范成运动 范成运动
用齿条刀具加工齿轮
用标准齿条刀具加工标准齿轮必须使刀具 的分度线与被加工齿轮的分度圆相切并作纯滚 动。
标准齿条刀的齿廓,它与齿条的齿廓基本 相同,只是齿顶增加了c*m的高度。在齿条刀 中线上的齿厚与齿距之比等于0.5(即齿厚等于 齿槽宽)。与以半径为ρ的圆弧相切并平行于齿 条刀中线的直线刀刃称为刀顶线,它是用于切 制被切齿轮齿根圆的。半径为ρ的圆角刀刃,是 切出齿根部分非渐开线的过渡曲线。
切制圆柱外齿轮轮齿时,齿条刀是逐渐切 入齿轮坯的,切入的终点位置不同,切出 的齿轮轮齿尺寸就不同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例2.如图示齿轮机构 m 3、 20 计该两对齿轮。
z1
* 、 ha
1、c
。设
*
' a 0.25、z1 18、z2 30、z3 27、 71
解:1).确定传动类型
a12
3 ( 18 30 ) 72 a ' 2 m a13 ( z1 z 2 ) 2
23
0
2.0
1.362
220 210
1.0
0.645
X1
10 . 0.5
0
Z
50
根切限制线
100
150
200
20 0
54 3 2 1
选择变位系数界限图
19 0 18.5 0
取 x1 0.645, x3 0.717
则x2 0.314 0.645 0.959
第二对: 第一对: 第二对:
2)选择变位系数,计算参数
17 13 小齿轮正变位: x1 x1min 17 0.235 大齿轮正变位: x2 x1 0.235
0, y 0, 。
d , db , da , d f , ha , hf , P , s, e。 3)计算齿轮各部分尺寸: 4)校验:sa1 , (略)。
m ( z1 z 2 ) 2
z2
z3
3 ' ( 18 27) 67.5 a 2
1和2应采用负传动,1和3应采用正传动
2)求参数 a ' ' ' a cos a cos arccos( ' cos ) a 72 ' ' arccos( cos 20 ) 17 39 第一对: 12 71 第二对:
'
16 19.52 2 x2 16 tg 20 2 x2 0.482 x1 x2 0.482
作业: s ? 计算尺寸,校核 a 1 8-26、8-28、8-31、8-32、 8-33、8-34、8-35、8-36
. 3 i 16 . ~ 2.2 4 i 2.2 ~ 30
X
. 5 i 30
26.5 0 26 0
m 10 m7 m 8,925 0Fra bibliotek24 0
3.0
m 6.5
23
0
2.0
220
1.0
210
X1
10 .
0.5
0
Z
50
根切限制线
100
150
200
20 0
54 3 2 1
选择变位系数界限图
§ 5-7 变位齿轮传动
1)标准齿轮传动
一、变位齿轮传动的类型和特点 x1 x2 0 1、零传动:
x1 x2 0,且x1 0, x2 0,
a a(r r ),
齿数条件:
Z1 Z min , Z 2 Z min .
2)等移距齿轮传动 ( 高度变位传动 ) x1 x2 0, 且x1 x2 0 a a(r r ), , y 0 不同之处:
2) 齿顶不变尖 4 )不干涉 3) 满足重合度的要求 sa ( 0.25 ~ 0.4 )m
选择变位系数应满足的质量方面的要求: 1)等弯曲强度;2)等磨损强度。 选择变位系数的方法:封闭图法;图表法。
. 1 i 1 ~ 12
2 i 12 . ~ 16 . 12 3 4 5
x2min
2.0
例1:已知变速箱中一对齿轮Z1=13, Z2=44, m=4.25, h a 1, c 0.25, a 121.125, 20 。 试设计该对齿轮。 解:1)确定传动类型
a a, 可采用等移距变位齿轮传动。
m 4.25 a ( Z1 Z 2 ) (13 44 ) 121.125 2 2
a a, , y 0, y 0
齿数条件:不受任何限制。 优点:可配凑中心距;结构尺寸小,改善 磨损情况;强度提高,承载能力大。 缺点: 下降,互换性差。
2)负传动: x1 x2 0
a a, , y 0, y 0
齿数条件: z1
z2 2zmin
优点:可配凑中心距; 略有增大。 缺点:强度下降,承载能力下降,互换 性差。
四、变位齿轮的应用
1.应用等移距传动,避免根切,缩小 结构尺寸,改善传动质量;修复旧
齿轮。
2.应用角度变位传动可配凑中心距。
四、变位系数的选择
选择变位系数应满足的基本条件: 1)不根切 x x min
ha1 (h a x1 )m h f 1 (h a c x1 )m
为避免发生根切,则Z1 Z 2 2Z min 优点:减小机构的尺寸,改善磨损情况; 提高小齿轮强度,提高承载能力。
缺点: 略有下降,互换性差。
x1 x 2 0 2、角度变位传动:
1)正传动: x1 x 2 0
第一对:
a ' a12 71 72 1 y1 m 3 3 ' a a13 71 67.5 y2 1.17 m 3
1 ( x1 x2 ) y1 0.019
1 2 0.1953
2 ( x1 x3 ) y2 0.1953 1 2 , 应选一个偏大的值
这样三个齿轮齿顶缩减量相同。 3).具体尺寸计算:
例3.已知:如图示 m 16、z1 17、z2 245、 一齿轮对中的大齿轮磨损严重,现齿廓磨损 要求修复。问怎样设计大小齿轮。磨损最 ' 严重轮齿的分度圆齿厚为 s 19.52mm。
s'
m s 2 xmtg 解: 2
19 0 18.5 0
x2
x1min
z1 25 z2 42
' "
2.0
1.0
s 1 0.40 m
1.0
0
1.0
x1
1 0.6 b 1 0.0 a 2 0.0 1.0
1.2
s 1 0.25 m
2 0.6
双齿对啮合的界限图 -sa1 0. 40 m 实际啮合 切的限制 小齿
2 线两端点处,达到 0.6 --节点移至双 曲线; 轮齿顶厚的限制 齿根滑动系数均衡 齿对啮合区的深度为 曲线。 的曲线。 0.6m 的界限曲线
0 1 .2 1 -单齿对啮合与 重合 a -小齿轮为主动时, x1min 小齿轮根 双齿对啮合的界限图 达到轮齿相等弯曲 度的限制曲线; 切的限制 强度的曲线; 1 0.6--节点移至双 曲线; s 0 . 25 m 小齿 a-1 大齿轮为主动时, 齿对啮合区的深度为 b 0.6m 的界限曲线 轮齿顶厚的限制 达到轮齿相等弯曲 强度的曲线; 0 x 曲线; --单齿对啮合与 2 2min 大齿轮根
先确定 x1与x3 ,根据简易封闭图
. 1 i 1 ~ 12
2 i 12 . ~ 16 . 12 3 4 5
. 3 i 16 . ~ 2.2 4 i 2.2 ~ 30
X
. 5 i 30
26.5 0 26 0
m 10 m7 m 8,9
25 0
24 0
3.0
m 6.5
' 13 67.5 arccos( cos 20 ) 2642' 71
z1 z2 ' x1 x2 ( inv 12 inv ) 0.314 2tg z1 z3 ' x1 x3 ( inv 13 inv ) 1.362 2tg
' a 与a13 差得大 分配变位系数: