2016年浙大远程大自动控制元件离线作业(必)
浙大远程操作系统原理离线作业及答案
浙⼤远程操作系统原理离线作业及答案操作系统原理离线作业⼀、单选题1.进程P0和P1的共享变量定义及其初值为boolean flag[2];int turn=0;flag[0]=FALSE;flag[1]=FALSE;若进程P0和P1访问临界资源的类C代码实现如下:void P0() //P0进程{ while(TURE){flag[0]=TRUE; turn = 1;while (flag[1] && turn == 1) ;临界区;flag[0] = FALSE;}}void P1() //P1进程{ while(TURE){flag[1]=TRUE; turn = 0;while (flag[0] && turn == 0) ;临界区;flag[1] = FALSE;}}则并发执⾏进程P0和P1时产⽣的情况是:DA.不能保证进程互斥进⼊临界区、会出现“饥饿”现象B.不能保证进程互斥进⼊临界区、不会出现“饥饿”现象C.能保证进程互斥进⼊临界区、会出现“饥饿”现象 D.能保证进程互斥进⼊临界区、不会出现“饥饿”现象2.有两个进程P1和P2描述如下:shared data:int counter = 6;P1 :Computing;counter=counter+1;P2 :counter=counter-2;两个进程并发执⾏,运⾏完成后,counter的值不可能为 C 。
A. 4B. 5C. 6D. 73.某计算机采⽤⼆级页表的分页存储管理⽅式,按字节编址,页⼤⼩为210字节,页表项⼤⼩为2字节,逻辑地址结构为:页⽬录号页号页内偏移量逻辑地址空间⼤⼩为216页,则表⽰整个逻辑地址空间的页⽬录表中包含表项的个数⾄少是BA.64 B.128 C.256 D.5124.在动态分区系统中,有如下空闲块:空闲块块⼤⼩(KB)块的基址1 80 602 75 1503 55 2504 90 350此时,某进程P请求50KB内存,系统从第1个空闲块开始查找,结果把第4个空闲块分配给了P进程,请问是⽤哪⼀种分区分配算法实现这⼀⽅案? CA.⾸次适应B. 最佳适应C. 最差适应D. 下次适应5.在⼀页式存储管理系统中,页表内容如下所⽰。
2016浙大远程信息系统安全离线作业

2016浙大远程信息系统安全离线作业浙江大学远程教育学院《信息系统安全》课程作业姓名:学号:年级:学习中心:—————————————————————————————第一次作业一、判断题提示:此题为客观题,进入“在线”完成。
二、选择题提示:此题为客观题,进入“在线”完成。
三、简答题1、SIM卡是(Subscriber Identity Model 客户识别模块)的缩写,也称为智能卡、用户身份识别卡, GSM数字移动电话机必须装上此卡方能使用。
一般SIM卡的IC芯片中,有8kB 的存储容量,可供储存以下信息: (1) 100组电话号码及其对应的姓名文字。
(2) 15组短信息(Short Message)。
(3) 5组以上最近拨出的号码。
(4) 4位SIM卡密码(PIN)。
SIM卡有两个PIN码:PIN1码和PIN2码。
通常讲的PIN 码就是指PIN1码,它用来保护SIM卡的安全,加密SIM卡中的数据,是属于SIM卡的密码。
PIN2码跟网络的计费(如储值卡的扣费等)和SIM卡内部资料的修改有关。
某间谍被国家安全部门抓获,将手机SIM卡咬碎成几个部分。
国家安全部门将SIM卡的各部分数据恢复整合,获得部分联系人信息。
问国家安全部门需要进行哪些流程。
(视频教学内容第13、14章)1)S IM被咬碎成几个部分,首先需要把每个部分存储的IC芯片中的数据读出2)根据咬碎几个部分的几何位置,恢复原SIM卡中8KB数据3)恢复的8KB数据是加密过的数据,属于密文4)需要破解PIN1码,PIN码只有4位,可以穷举从0000到9999。
5)用PIN1码解密获得电话号码、短信、最近拨出的号码。
6)容易出错地方:PIN2可以不解密。
根据题意,PIN2与计费有关和SIM卡内部资料的修改,不用来加密数据2、银行卡复制器是一种金融入侵工具,安装在银行的柜员机的磁卡入口处,只要卡插入后账户资料就被磁卡采集器读取,同时需要偷看用户的密码。
2016秋新版 浙大远程 电子技术基础 离线作业答案 第二篇 第1章习题(word文档良心出品)
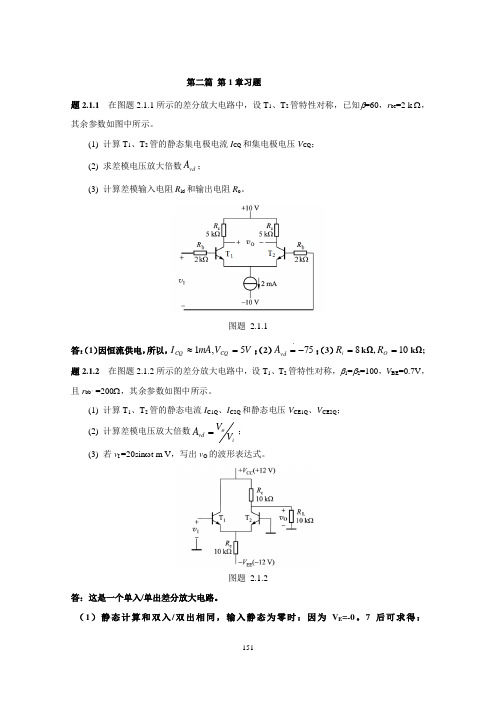
第二篇 第1章习题题2.1.1 在图题2.1.1所示的差分放大电路中,设T 1、T 2管特性对称,已知β=60,r be =2 k Ω,其余参数如图中所示。
(1) 计算T 1、T 2管的静态集电极电流I CQ 和集电极电压V CQ ; (2) 求差模电压放大倍数vd A ;(3) 计算差模输入电阻R id 和输出电阻R o 。
图题 2.1.1答:(1)因恒流供电,所以,V V mA I CQ CQ 5,1=≈;(2).75-=vd A ;(3)8=i R k Ω,10=O R k Ω; 题2.1.2 在图题2.1.2所示的差分放大电路中,设T 1、T 2管特性对称,β1=β2=100,V BE =0.7V ,且r bb ′=200Ω,其余参数如图中所示。
(1) 计算T 1、T 2管的静态电流I C1Q 、I C2Q 和静态电压V CE1Q 、V CE2Q ; (2) 计算差模电压放大倍数iovd V V A =;(3) 若v I =20sin ωt m V ,写出v O 的波形表达式。
图题 2.1.2答:这是一个单入/单出差分放大电路。
(1)静态计算和双入/双出相同,输入静态为零时:因为V E =-0。
7后可求得:V V V V V V mA I I OQ Q CE Q CE Q C Q C 58.2,28.3,7.12,57.02121====;(2)1.52.=vd A ;(3))sin 04.158.2(t v o ω+=V 。
题2.1.3 在图题2.1.3所示的差分放大电路中,设T 1、T 2管特性对称,β1=β2=100,V BE =0.7V ,且r bb ′=200Ω,其余参数如图中所示。
(1) 计算T 1、T 2管的静态电流I CQ 和静态电压V CEQ 。
若将R c1短路,其它参数不变,则T 1、T 2管的静态电流和电压如何变化?(2) 计算差模输入电阻R id 。
当从单端(c 2)输出时的差模电压放大倍数2vd A &=?; (3) 当两输入端加入共模信号时,求共模电压放大倍数2vc A &和共模抑制比K CMR ; (4) 当v I1=105 mV ,v I2=95 mV 时,则T 2管集电极电压v C2是多少?e 点电压v E 是多少?图题 2.1.3答:(1) 求静态工作点:mA 56.0102101/107122)1/(1=⨯+-=+β+-=e b BE EE CQ R R V V IV 7.07.01010056.01-≈-⨯-=--=BE b BQ E V R I V V 1.77.01056.012=+⨯-=--=E c CQ CC CEQ V R I V V若将R c1短路,则mA 56.021==Q C Q C I I (不变) V 7.127.0121=+=-=E CC Q CE V V VV 1.77.01056.0122=+⨯-=--=E c CQ CC Q CE V R I V V (不变)(2) 计算差模输入电阻和差模电压放大倍数:Ω=⨯+=β++=k 9.456.026101200)1('EQ T bb be I V r r Ω=+⨯=+=k 8.29)9.410(2)(2be b id r R R5.338.2910100)(22.=⨯=+=be b cd r R R A β(3) 求共模电压放大倍数和共模抑制比:5.0201019.410101002)1(2.-=⨯++⨯-=+++-=e be b c c R r R R A ββ675.05.332.2.===c d CMR A A K (即36.5dB ) (4) 当v I1=105 mV ,v I2=95 mV 时,mV 109510521=-=-=I I Id v v vmV 100295105221=+=+=I I Ic v v v m V 285100)5.0(105.332.2.2=⨯-+⨯=⋅+⋅=∆Ic c Id d O v A v A v所以,V O2相对于静态值增加了285 mV 。
2016秋新版 浙大远程 电子技术基础 离线作业答案 第二篇 第4章习题

第二篇 第4章习题题2.4.1 一个负反馈放大器产生自激振荡的相位条件为πϕ)12(+=n AF ,而正弦振荡器中的相位平衡条件是πϕn AF 2=,这里有无矛盾?答:负反馈反馈回来的信号与原信号应该是-180o 的正数倍,才能形成负反馈;而振荡电路必须是正反馈,即反馈回来的信号应该是原信号360o 的正数倍。
题2.4.2 振荡器的幅度平衡条件为1=。
F A ,而起振时,则要求1>。
F A ,这是为什么? 答:平衡条件是稳定振荡时的幅度要求,而起振必须要求正反馈量不断地大于原信号,才能振起来。
振起来后,如一直还大于,则放大器会进入饱和,使信号失真,所以应该进入稳定振荡,即要求振幅自动维持在1的水平。
题2.4.3 RC 桥式正弦振荡器如图题2.4.3 所示,其中二极管在负反馈支路内起稳幅作用。
图题2.4.3(1)试在放大器框图A 内填上同相输入端(+)和反相输入端(-)的符号,若A 为μA741型运放,试注明这两个输入端子的管脚号码。
(2)如果不用二极管,而改用下列热敏元件来实现稳幅:(a )具有负温度系数的热敏电阻器;(b )具有正温度系数的钨丝灯泡。
试挑选元件(a )或(b )来替代图中的负反馈支路电阻(R 1或R 3),并画出相应的电路图。
答:(1) RC 桥式正弦振荡器中,由于RC 串并联网络在f=f o 时,其相移φAF =0,为满足相位条件:φAF =φA +φF =0,放大器必须接成同相放大器,因此与RC 串并联网络连接的输入端为(+),与负反馈支路连接的输入端为(-),若A 为A741,其管脚号为:反相输入端为2,同相输入端为3。
(2) (a)负温度系数的热敏电阻取代R 3;(b)正温度系数的钨丝灯泡取代R1。
题2.4.4试用相位平衡条件判别图题2.4.4所示各振荡电路。
(1)哪些可能产生正弦振荡,哪些不能?(注意耦合电容C b、C e在交流通路中可视作短路。
)(2)对那些不能满足相位平衡条件的电路,如何改变接线使之满足相位平衡条件?(用电路图表示。
2016年浙大远程教育供配电实用技术离线作业(选)
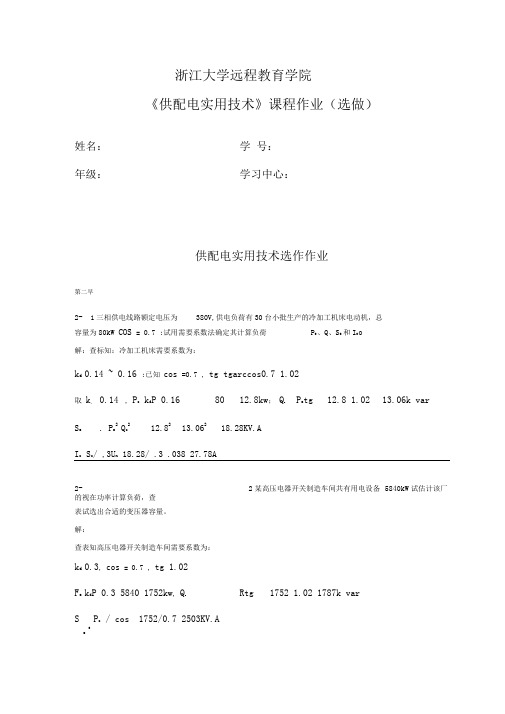
浙江大学远程教育学院《供配电实用技术》课程作业(选做)姓名:学号:年级:学习中心:供配电实用技术选作作业第二早2-1三相供电线路额定电压为380V,供电负荷有30台小批生产的冷加工机床电动机,总容量为80kW COS = 0.7 ;试用需要系数法确定其计算负荷P c、Q、S c和I c o解:查标知:冷加工机床需要系数为:k d 0.14 ~ 0.16 ;已知cos =0.7 , tg tgarccos0.7 1.02取k, 0.14 , P c k d P 0.16 80 12.8kw;Q c P c tg 12.8 1.02 13.06k varS c . P c2Q c212.8213.06218.28KV.AI c S c/ ,3U n18.28/ .3 .038 27.78A2-2某高压电器开关制造车间共有用电设备5840kW试估计该厂的视在功率计算负荷,查表试选出合适的变压器容量。
解:查表知高压电器开关制造车间需要系数为:k d 0.3, cos = 0.7 , tg 1.02F c k d P 0.3 5840 1752kw, Q c Rtg 1752 1.02 1787k varS P c / cos 1752/0.7 2503KV.Acc选用SZ3150-6变压器。
3-1试按发热条件选择220/380V、TN— C系统中的相线和PEN线截面及穿线钢管直径。
己知线路的计算电流为120A,安装地点的环境温度为25C。
拟用BV型铜芯塑料线穿PVC管埋地敷设。
解:TN-C系统中相线和PEN线穿钢管是四根单芯BV型铜芯塑料线,安装环境温度为25o C 时,需要线路电流大于计算电流120A,查表得当管径为70mm导线截面为70口吊时,线路电流I=161A>I 30 = 120A 。
XI0.4 (800 1.5 600 (1.5 0.5) 600 (1.5 0.5 0.5))156 V 10线路电压的电阻损失为:U rl 5%U N U xl 500 156 344V( P)1 P2(h 12) P3(l1 3 4 5 6 7 l3))和r。
浙大远程机电运动控制系统作业必做答案完整版
浙大远程机电运动控制系统作业必做答案 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】机电运动控制系统(习题集)必做作业1.直流电机有哪些调速方法根据其速度公式说明之, 并说明如何釆用电力电子手段实现。
答: 根据直流电机速度公式 φφe a a a e C I R U C E n -== , 有 (1) 电枢电压 U a 控制 - 调压调速 (向下调速)采用电力电子手段时,有晶闸管可控整流器供电和自关断器件H 型桥脉宽调制(PWM)供电等方式, 其损耗小,控制性能好。
(2) 磁场φ 控制 - 弱磁(向上调速),采用电力电子手段时,有晶闸管可控整流器供电励磁控制。
(3)由于运行损耗大、效率低, 一般不再釆用串 R a 调速。
2. 画出双闭环晶闸管—直流电动机不可逆调速系统电原理图(非方块图),须清楚表达两个闭环的关键元件,写出各部分名称,标注有关信号量;指出两闭环连接上的特点及相互关系。
答:双闭环晶闸管—直流电动机不可逆调速系统电原理图如下:两闭环连接上的关系是速度调节器的输出作为电流调节器的输入,这就使得该系统具有由速度调节器的输出限幅值确定了电流环的给定值,进而确定了系统的最大电流的特点。
3.分析双闭环晶闸管—直流电动机不可逆调速系统:(1) 如果要改变转速,应调节什么参数为什么(2) 如要控制系统的起动电流、确保系统运行安全,应调节什么参数为什么答: (1) 改变转速时只能改变速度调节器的输入u g ,因为它是速度环的指令信号。
改变速度调节器的参数对稳态速度无调节作用,仅会影响动态响应速度快慢。
(2) 要控制系统的起动电流、确保系统运行安全,应调节速度调节器的输出限幅值。
因为速度调节器的输出限幅值确定了电流环的给定值,进而确定了系统的最大电流。
4. 填空 : 双闭环晶闸管━直流电动机调速系统中,内环为_电流_环,外环为_速度_环,其连接关系是:_速度调节器_的输出作为_电流调节器_的输入,因此外环调节器的输出限幅值应按_调速系统允许最大电流_ 来整定;内环调节器的输出限幅值应按_可控整流器晶闸管最大、最小移相触发角_来整定。
浙江大学远程物理化学离线作业答案
浙江大学远程教育学院《物理化学》课程作业(必做)(2016)第一章热力学第一定律一、填空题1、系统的性质分为广度性质与_____强度性质________。
2、热力学第一定律的数学表达式就是Δq=u+W 。
3、ΔU=Q v的适用条件就是封闭系统中等容非体积功为零。
4、O2(g)的的标准摩尔燃烧焓等于零(填“小于”、“大于”或“等于” )。
二、简答题1、什么就是系统?什么就是环境?答:将一部分物质从其她部分中划分出来,作为研究对象,这一部分物质就称为系统;系统之外与系统密切相关的部分称为环境。
2、什么就是等压过程?什么就是可逆过程?答: 等压过程就是在环境压力恒定下,系统始,终态压力相同且等于环境压力的过程。
某系统经过一过程由状态1变为状态2之后,如果能使系统与环境都完全复原,则该过程称为可逆过程。
3、什么就是热力学第一定律?答:自然界的一切物质都具有能量,能量有多咱不同的形式,能量可以从一种形式转化为另一种形式,能量的总量在转化过程中保持不变。
4、什么就是标准摩尔生成焓?什么就是标准摩尔燃烧焓?答:自然界的一切物质都具有能量,能量有多咱不同的形式,能量可以从一种形式转化为另一种形式,能量的总量在转化过程中保持不变。
三、计算题1、1 mol单原子理想气体在298K时,在恒定外压为终态压力下从15、00 dm3等温膨胀到40、00 dm3,求该过程的Q、W、ΔU与ΔH。
ΔU=ΔH=0答:P=nRT/V=(1*8、31*298)/(40/1000)=61、94KPaW=-61、94*(40-15)=-1548、5JQ=-W=1548、5J2、1 mol 水在100℃、101、3kPa 下蒸发为水蒸气,吸热40、7kJ,求该过程的Q、W、△U与△H 。
答:Q =40、7KjW=-3、10kJ △U=37、6Kj △H=40、7kJ3、 已知298、2K 时,NaCl(s)、H 2SO 4(l)、Na 2SO 4 (s)与HCl(g)的标准摩尔生成焓分别为-411、-811、3、-1383与-92、3 kJ·mol -1,求下列反应的θm r H ∆与θm r U ∆2NaCl(s) + H 2SO 4(l) = Na 2SO 4(s) + 2HCl(g)答:2NaCl(s)+H2SO4(1)=Na2SO4(s)+2HCl(g)△rHme=(∑H)产物-(∑H)反应物 =(-1383-92、3*2)-(-411*2-811、3) =65、7KJ/mol4、 已知298、2K 时,C(石墨)、H 2(g)与C 2H 6(g)的标准摩尔燃烧焓分别为-393、5 kJ·mol -1、-285、8 kJ·mol -1与-1559、8 kJ·mol -1。
自动控制元件离线作业答案
浙江大学远程教育学院《自动控制元件》课程作业—————————————————————————————第一章直流伺服电动机1-1直流伺服电动机的电磁转矩和控制电流由什么决定答:电磁转矩T em=C mΦI a 由每极磁通量和绕组电流大小决定。
控制电流由负载转矩大小决定。
1-2当直流伺服电动机的负载转矩恒定不变时,控制电压升高将使稳态的电磁转矩、控制电流、转速发生怎样的变化为什么答:(1)控制电流由负载转矩大小决定,不变。
(2)电磁转矩T em=C mΦI a 可见电磁转矩也不变。
(3)Ua-Ua0=Ea=CeΦn,可见转速变大。
1-3已知一台直流电动机,其电枢额定电压Ua=110V,额定运行时电枢电流Ia=0.4A,转速n=3600rpm,它的电枢电阻Ra=50欧姆,负载阻转矩To=。
试问该电动机额定负载转矩是多少解:Ea=Ua-IaRa=*50=90VEa=CeΦnCe=0.105Cm得:90=0.105CmΦ*3600 则CmΦ=T2+T0=Tem= CmΦIa代入得:T2=**10-3=1-6当直流伺服电动机电枢电压、励磁电压不变时,如将负载转矩减少,试问此时电动机的电枢电流、电磁转矩、转速将怎样变化并说明由原来的状态到新的稳态的物理过程。
解:Ea=Ua-IaRa=CeΦnTem=T2+T0=CmΦIa电枢电流由负载转矩决定。
可得:电枢电流减小、电磁转矩减小、转速增大。
第二章直流测速发电机2-4某直流测速发电机,其电枢电压U=50V,负载电阻R L=3000Ω,电枢电阻Ra=180Ω,转速n=3000rpm,求该转速下的空载输出电压Uo和输出电流Ia。
解:U0=Ea/(1+Ra/Rf)=Ia=U0/Rl=3000=0.015A第三章步进电动机3-8某五相反应式步进电动机转子有48个齿,试分析其有哪几种运行方式及对应的步距角,并画出它们的矩角特性曲线族。
解:步矩角:2π/(48*5)=π/120五相单5拍五相双5拍五相三拍五相四拍3-10四相反应式步进电动机,转子有50个齿,试计算各种运行方式的步距角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浙江大学远程教育学院 《自动控制元件》课程作业
姓名: 学 号: 年级:
学习中心:
第一章 直流伺服电动机
1-1直流伺服电动机的电磁转矩和控制电流由什么决定?
答:1. 由T em =C m ΦI a 可知电磁转矩由每极磁通量和绕组电流大小决定。
2. 由T em =T 0 +T 2 =CmΦIa 控制电流由负载转矩(T 2)和空载转矩(T 0)决定。
1-2当直流伺服电动机的负载转矩恒定不变时,控制电压升高将使稳态的电磁转矩、控制电流、转速发生怎样的变化?为什么?
答:1. 电磁转矩T em =T 0 +T 2可见电磁转矩不变; 由T em =C m ΦI a 知控制电流I a
也不变; 2. KeKt
RaTem
Ke Ua n -
=
可见U a 升高使得理想空载转速变大导致转速n 升高。
1-3已知一台直流电动机,其电枢额定电压Ua=110V ,额定运行时电枢电流Ia=0.4A ,转速n=3600rpm ,它的电枢电阻Ra=50欧姆,负载阻转矩To=15mN.m 。
试问该电动机额定负载转矩是多少? 答:Ea= Ua- IaRa=110-0.4×50=90V
Ea=Ce Φn, Ce=0.105Cm 所以Cm Φ=90/0.105/3600= 0.238; T em =T 0 +T 2=CmΦIa ,
所以T 2=CmΦIa -T 0 =0.4*0.238 – 15*10-3=0.0952-15×10-3=80.2mN.m
1-6当直流伺服电动机电枢电压、励磁电压不变时,如将负载转矩减少,试问此时电动机的电枢电流、电磁转矩、转速将怎样变化?并说明由原来的状态到新的稳态的物理过程。
答:电磁转矩T em =T 0 +T 2可见T 2 ↓电磁转矩也↓; 由T em =C m ΦI a 知控制电流I a ↓; Ea= Ua- IaRa 可见I a ↓知Ea↑,由Ea=Ce Φn 知Ea↑知n ↑;
当电磁转矩降低到和新的负载转矩相等后, 系统即进入新的平衡状态.
第二章 直流测速发电机
2-4某直流测速发电机,其电枢电压U=50V ,负载电阻R L =3000Ω,电枢电阻Ra=180Ω,转速n=3000rpm ,求该转速下的空载输出电压Uo 和输出电流Ia 。
答: 发电机Ea = Ua +IaRa 输出电流: Ia=50/3000=0.0167A
Ea =50+0.0167×180=53; 所以空载电压Uo =Ea =53
第三章 步进电动机
3-8某五相反应式步进电动机转子有48个齿,试分析其有哪几种运行方式及对应的步距角,并画出它们的矩角特性曲线族。
答: 5相单5拍A→B→C→D→E→A Θb = 360/5/48= 1.5°
T emA =-T jmax sin(Θe ) T emB =-T jmax sin(Θe -
52π) T emC =-T jmax sin(Θe -5
4π
)
T emD =-T jmax sin(Θe -56π) T emE =-T jmax sin(Θe -5
8π
)
5相双5拍AB→BC→CD→DE→EA→AB Θb = 360/5/48= 1.5°
T emAB =-1.62T jmax sin(Θe -5
π
) T emBC =-1.62T jmax sin(Θe -53π) T emCD =-1.62T jmax sin(Θe -π) T emDE =-1.62T jmax sin(Θe -5
7π) T emEA =-1.62T jmax sin(Θe -5
9π
)
5相10拍 A→AB→B→BC→C→CD→D→DE→E→EA→AB Θb =
360/10/48=
0.75°
3-10四相反应式步进电动机,转子有50个齿,试计算各种运行方式的步距角。
并画出其单、双拍制的矩角特性曲线族。
若单相通电时的最大静态转矩为0.1N ·m ,试计算各种运行方式的起动转矩;并判断转子上负载为0.08N ·m 时哪种运行方式可使步进电动机正常运行。
解: 1. 四相单四拍步距角Θb =360/4/50= 1.8°, Θbe = 2π
,
如下图四相单四拍相邻2相矩角特性曲线交点q1转矩 T emq1=TT jmax sin
4
π
=0.1×0.707=0.0707N·m <0.08N·m 电机不能正常运行
2. 四相双四拍步距角Θb =360/4/50=1.8°, Θbe = 2
π, T emq1= 1.414T jmax sin 4
π
=1.414×0.0707=0.1N·m >0.08N·m , 电机能正常运行
3.四相八拍步距角Θb =360/8/50=0.9°, Θbe = 4π
T emq1= 1.414T jmax sin 4
π
=1.414×0.0707=0.1N·m >0.08N·m , 电机能正常运行
矩角特性曲线族
矩角特性曲线族
第四章旋转变压器
4-6用正余弦旋转变压器可以构成直角坐标系旋转θ角的变换,接线如图题图4-1,4-2所示(见书P119)。
试分析其工作原理。
解:Uxs= Ussinθ, Uys = Uscosθ, Uxc= Uccosθ, Uyc = Ucsinθ,
因Ux= Uxs- Uxc,Uy= Uys +Uyc; 有Ux= Ussinθ-Uccosθ,Uy= Uscosθ+Ucsinθ,如p点与坐标系uov相当于正余弦旋转变压器转子,当其顺时针旋转θ,坐标系顺uov时针旋转θ就会输出新的坐标(Ux 、Uy )
4-8有一只旋变发送机XF和一只旋变变压器XB定子绕组对应联接作控制式运行,如题图4-3所示(见书P119),已知:图中的θ1=15°°,θ2=10°°,试求:
(1)旋变变压器转子的输出绕组的协调位置XT;
(2)失调角r。
解: 1. 协调位置XT在转子逆时针旋转95°
2.失调角r。
γ= -θ1- (90-θ2)= -95°
第五章自整角机
5-4三台自整角机如题图5-1所示(见书P147)接线。
中间一台为力矩式差动接收机,左右两台为力矩式发送机,试问:当左右边两台发送机分别转过θ2、
θ1角度时,中间的接收机将转过的角度θ与θ2和θ1之间是什么关系?
解:r=θ2-θ1 ,
θ2-θ1>0则顺时针转动
θ2-θ1=0则不动
θ2-θ1<0则逆时针转动
5-6某力矩式自整角机接线如题图5-3所示(见书P148)
(1)画出接收机转子所受的转矩方向:
(2)画出接收机的协调位置;
(3)求失调角。
解: 1. 接收机转子所受的转矩方向是逆时针方向
2.接收机转子逆时针旋转转角度= 15-35= -20°
3.失调角r=θ1-θ2=15°-35°= -20°
5-7对于题图5-4所示(见书P148)自整角测量线路,CX为自整角发送机,CT为自整角变压器,它们的转子的转角分别为θ1和θ2。
画出三相绕组合成磁场轴线的位置,并写出输出电势的有效值Eo和转角θ1、θ2的关系式。
解: 1. 合成磁场轴线的位置:
2. 输出电势Eo = 4.44fWϕSin(θ1 –θ2)
f为激磁电源频率,W为自整角变压器输出绕组有效匝数;θ为自整角变压器的主磁通。