实验三_连续系统串联校正
_自动控制原理实验教学改革肖理庆

求学生独立完成剩余部分并观察程序运行结果。本 环节目的是使学生掌握利用 Matlab 编程对控制系 统进行简单分析与设计的能力。
2 实验内容改革
我院 2008-2009 学年“自动控制原理”教学大纲 中,实验教学总共 16 学时,实验项目如表 1 所示。
专业实验室每台计算机均安装了课题小组利用 Matlab 图形用户界面设计功能自制的虚拟实验系 统。本系统包 含 了“自 动 控 制 原 理 实 验 箱 ”所 有 实 验,学生在实验教学中可以利用此虚拟实验系统,灵 活改变实 验 参 数,并 根 据 实 验 结 果 验 证 相 关 结 论。 本环节主要为了克服实验箱单元电路不能灵活组合 的缺点,要求学生把主要精力集中在系统特性的研 究上。 1. 3 Simulink 仿真
由表 1 可知,开设的实验项目主要为验证性实 验,缺乏设 计 性 实 验、综 合 性 实 验 以 及 专 业 拓 展 实 验。为了鼓励学生自主实验,培养并提高学生科学 实验能力、创新能力以及实践应用能力,提高实验教 学效果,我们更新了实验项目,如表 2 所示。
表 2 “自动控制原理”提高型实验项目
实验项目 编号
“自动控制原理”是电气工程及其自动化专业一 门专业基础课,在专业课程体系中占有极其重要的地 位[1]。“自动控制原理”主要内容包括: 控制系统的 数学模型、控制系统的时域分析法、根轨迹法、频率 法、控制系统的校正、非线性系统的分析、采样控制系 统的分析与设计等。由于课程涉及的系统分析与设 计方法复杂,因此学生普遍反映该课程比较难学[2]。
表 1 “自动控制原理”验证型实验项目
实验项目 编号
S05203301 S05203302 S05203303 S05203304 S05203305 S05203306
几种常用的串联校正装置及校正方法
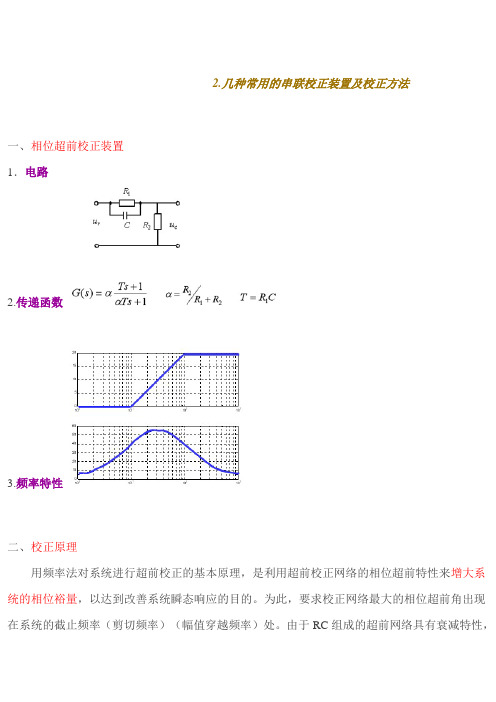
2.几种常用的串联校正装置及校正方法一、相位超前校正装置1.电路2.传递函数3.频率特性二、校正原理用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目的。
为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)(幅值穿越频率)处。
由于RC组成的超前网络具有衰减特性,因此,应采用带放大器的无源网络电路,或采用运算放大器组成的有源网络。
一般要求校正后系统的开环频率特性具有如下特点:①低频段的增益充分大,满足稳态精度的要求;②中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是为了系统具有满意的动态性能;③高频段要求幅值迅速衰减,以较少噪声的影响。
三、校正方法方法多种,常采用试探法。
总体来说,试探法步骤可归纳为:1.根据稳态误差的要求,确定开环增益K。
2.根据所确定的开环增益K,画出未校正系统的博特图,量出(或计算)未校正系统的相位裕度。
若不满足要求,转第3步。
3.由给定的相位裕度值,计算超前校正装置应提供的相位超前量(适当增加一余量值)。
4.选择校正装置的最大超前角频率等于要求的系统截止频率,计算超前网络参数a和T;若有截止频率的要求,则依该频率计算超前网络参数a和T。
5.验证已校正系统的相位裕度;若不满足要求,再回转第3步。
例某单位反馈系统的开环传递函数如下设计一个超前校正装置,使校正后系统的静态速度误差系数Kv=20s-1,相位裕度为γ≥50°。
解:根据对静态速度误差系数的要求,确定系统的开环增益K。
绘制未校正系统的伯特图,如图中的蓝线所示。
由该图可知未校正系统的相位裕度为γ=17°根据相位裕度的要求确定超前校正网络的相位超前角由P133页,式(6-5)超前校正装置在w m处的幅值为在为校正系统的开环对数幅值为-6.2dB 对应的频率,这一频率就作为是校正后系统的截止频率。
计算超前校正网络的转折频率,由P133,式(6-4)为了补偿因超前校正网络的引入而造成系统开环增益的衰减,必须使附加放大器的放大倍数为4.2。
连续系统PID控制器设计及其参数整定(实验)
连续系统PID 控制器设计及其参数整定1 实验目的1.掌握PID 控制规律及控制器实现; 2.对给定系统合理地设计PID 控制器;3.掌握对给定控制系统进行PID 控制器参数在线实验工程整定的方法。
2 实验设备PC 机(装有MATLAB 软件)一台。
3 实验原理PID 控制器由比例单元(P )、积分单元(I )和微分单元(D )组成。
在控制系统的设计与校正中,PID 控制规律的优越性是明显,它的基本原理却比较简单。
基本的PID 控制规律可描述为:()Ic P D K G s K K s s=++或1()(1)c P d i G s K T s T s =++ 在串联校正中,比例控制可提高系统开环增益,减少系统稳态误差,提高系统的控制精度,但会降低系统的相对稳定性,甚至造成系统闭环系统不稳定;积分控制可以提高系统的型别,有利于提高系统稳态性能,但积分控制增加了一个位于原点的开环极点,是信号产生90°的相位滞后,对系统的稳定不利,故不宜采用单一的积分控制器;微分控制规律能反映输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性,但微分控制增加了一个(-1/τ)的开环零点,使系统的相角裕度提高,因此有助于系统动态性能的改善。
PID 控制器的参数整定是控制系统设计的核心内容,它根据被控过程的特性确定PID 控制器的比例系数、积分时间和微分时间。
PID 控制器参数整定的方法很多,概括起来有两大类:1) 理论计算整定法。
主要依据系统的数学模型,经过理论计算确定控制器参数。
2) 工程整定方法。
主要有Ziegler-Nichols 整定法、临界比例度法、衰减曲线法。
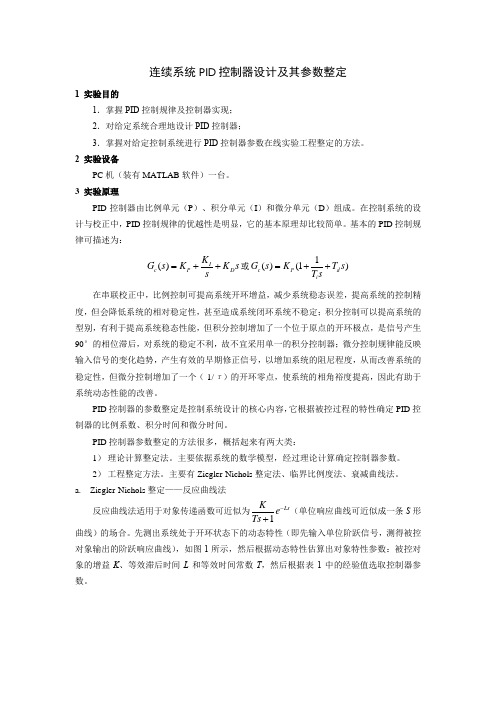
a. Ziegler-Nichols 整定——反应曲线法反应曲线法适用于对象传递函数可近似为1LsK e Ts -+(单位响应曲线可近似成一条S 形曲线)的场合。
先测出系统处于开环状态下的动态特性(即先输入单位阶跃信号,测得被控对象输出的阶跃响应曲线),如图1所示,然后根据动态特性估算出对象特性参数:被控对象的增益K 、等效滞后时间L 和等效时间常数T ,然后根据表1中的经验值选取控制器参数。
自动控制串联校正实验报告
实验五线性定常系统的串联校正班级:姓名:学号:实验指导老师:成绩:实验目的:1、对系统性能进行分析,选择合适的校正方式,设计校正器模型。
2、通过仿真实验,理解和验证所加校正装置的结构、特性和对系统性能的影响;3、通过模拟实验部分进一步理解和验证设计和仿真结果,进而掌握对系统的实时调试技术。
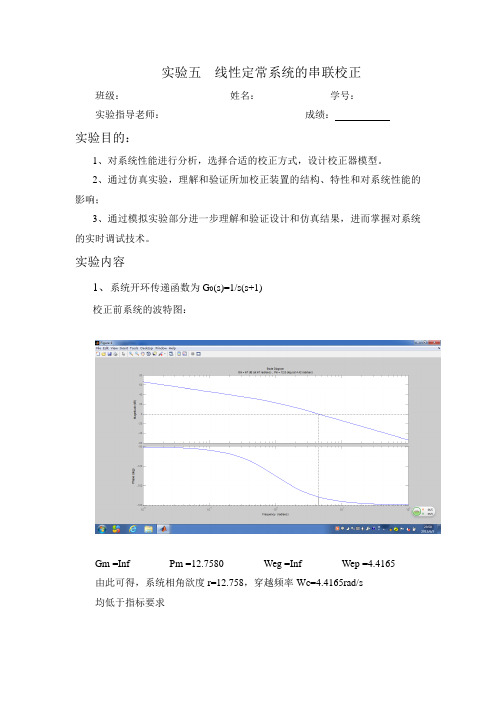
实验内容1、系统开环传递函数为G0(s)=1/s(s+1)校正前系统的波特图:Gm =Inf Pm =12.7580 Weg =Inf Wep =4.4165由此可得,系统相角欲度r=12.758,穿越频率Wc=4.4165rad/s均低于指标要求校正前闭环系统的单位阶跃响应曲线:由图可得,校正前系统的单位阶跃响应参数如下:最大超调量为70%,调整时间为Ts=5.78s.源程序代码如下:num = [20];den = [1 1 0];g = tf(num,den)Nyquist(g)bode(g)margin(g)[Gm,Pm,Weg,Wep] = Margin(g)gf = feedback(g,1)step(gf)2、经过理论计算得到校正器模型:Gc(s)=(0.38s+1)/(0.046s+1)校正后系统的波特图为Gm =Inf Pm =59.1872 Weg =Inf Wep =7.5393 校正后的系统相角欲度为r=59.1872,穿越角频率Wc=7.5393rad/s,符合性能指标要求。
校正前后系统的波特图比较:校正后闭环系统的单位阶跃响应由图可得,校正后闭环系统的单位阶跃响应参数如下:最大超调量为15%,调整时间Ts=0.744s。
系统的稳定性和快速性得到了提高。
源程序代码如下:num = [20]den = [1 1 0]g0 = tf(num,den)gc = tf([0.38 1],[0.046 1]);g = g0 * gc;Bode(g,g0)margin(g)[Gm,Pm,Weg,Wep] = margin(g)gf = feedback(g,1);figure;step(gf)3、模拟部分3.1 根据给定的实验模型搭接校正前的模拟电路图根据传递函数绘制系统模拟电路图,搭接后系统传递函数为G0(s)=19.6/s*(s+1)在试验台上搭接模拟电路完毕后,使用模拟示波器观测校正前系统的阶跃响应,其响应曲线如下图所示:从图中可以看出,模拟校正前网络的阶跃响应参数为:最大超调量为68.6%,调整时间为Ts=6.185s3.2 搭建校正后系统的模拟电路图,校正环节传递函数为:Gc(s)=(0.47s+1)/(1+0.039s)在试验台上搭接校正器的模拟电路后,并引入原系统,用模拟示波器观测校正后系统的阶跃响应,其响应曲线如图所示:由图可知,校正后系统阶跃响应参数如下:最大超调量为:9%,调整时间Ts=0.344s。
实验六 连续系统串联校正

实验六 连续系统串联校正本实验为设计性实验一、实验目的1.了解和观测校正装置对系统稳定性及动态特性的影响。
2.学习校正装置的设计和实现方法。
二、实验原理工程上常用的校正方法通常是把一个高阶系统近似地简化成低阶系统,并从中找出少数典型系统作为工程设计的基础,通常选用二阶、三阶典型系统作为预期典型系统。
只要掌握典型系统与性能之间的关系,根据设计要求,就可以设计系统参数,进而把工程实践确认的参数推荐为“工程最佳参数”,相应的性能确定为典型系统的性能指标。
根据典型系统选择控制器形式和工程最佳参数,据此进行系统电路参数计算。
在工程设计中,经常采用二阶典型系统来代替高阶系统(如采用主导极点、偶极子等概念分析问题)其动态结构图如图7-1所示。
同时还经常采用“最优”的综合校正方法。
图7-1二阶典型系统动态结构图 二阶典型系统的开环传递函数为)2()1()(2n n s s Ts s K s G ξωω+=+= 闭环传递函数2222)(nn n s s s ωξωω++=Φ 式中KTT K n 21,==ξω,或者n n T K ξωξω21,2== 二阶系统的最优模型(1)最优模型的条件根据控制理论,当22707.0==ξ时,其闭环频带最宽,动态品质最好。
把22=ξ代入KT 21=ξ得到,KT T K 21,21==或,这就是进行校正的条件。
(2)最优模型的动态指标为%3.4%100%21/=⨯=--ξξπσe ,T t n s 3.43≈=ω三、实验仪器及耗材1.PC电脑一台2.虚拟电子元件、示波器、万用表等。
四、实验内容及要求未校正系统的方框图如图7-2所示,图7-3是它的模拟电路。
图7-2未校正系统的方框图图7-3未校正系统的模拟电路设计串联校正装置使系统满足下述性能指标σ≤5%(1)超调量%(2)调节时间t s≤1秒K≥20 1/秒(3)静态速度误差系数v1.测量未校正系统的性能指标(1)按图7-3接线;σ和调节时间t s。
新版自动控制理论实验课程教学大纲.答案

《自动控制理论》实验教学大纲课程名称:自动控制理论课程性质:非独立设课使用教材:自编课程编号:面向专业:自动化课程学分:考核方法:成绩是考核学习效果的重要手段,实验成绩按学生的实验态度,独立动手能力和实验报告综合评定,以20%的比例计入本门课程的总成绩。
实验课总成绩由平时成绩(20%)、实验理论考试成绩(40%)、实验操作考试成绩(40%)三部分组成,满分为100分。
实验理论考试内容包含实验原理、实验操作方法、实验现象解析、实验结果评价、实验方案设计等。
考试题型以填空、判断、选择、问答为主,同时可结合课程特点设计其他题型。
实验操作考试根据课程特点设计若干个考试内容,由学生抽签定题。
平时成绩考核满分为20分,平时成绩= 平时各次实验得分总和÷实验次数(≤20分)。
每次实验得分计算办法为:实验报告满分10分(其中未交实验报告或不合格者0分,合格6分,良好8分,优秀10分);实验操作满分10分(其中旷课或不合格者0分,合格6分,良好8分,优秀10分)。
撰写人:任鸟飞审核人:胡皓课程简介:自动控制理论是电气工程及其自动化专业最主要的专业基础必修课。
通过本课程的各个教学环节的实践,要求学生能熟练利用模拟电路搭建需要的控制系统、熟练使用虚拟示波器测试系统的各项性能指标,并能根据性能指标的变化分析参数对系统的影响。
实验过程中要求学生熟悉自动控制理论中相关的知识点,可以在教师预设的实验前提下自己设计实验方案,完成实验任务。
教学大纲要求总学时80,其中理论教学68学时、实验12学时,实验个数6个。
9采样控制系统的分析√4选做10采样控制系统的动态校正√4选做合计实验一典型环节的电路模拟一、实验类型:综合性实验二、实验目的:1.熟悉THBCC-1型实验平台及“THBCC-1”软件的使用;2.熟悉各典型环节的阶跃响应特性及其电路模拟;3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
三、实验内容与要求:1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响;3.画出各典型环节的实验电路图,并注明参数。
线性系统串联校正
线性系统串联校正一·实验目的1. 熟悉串联校正装置对线性系统稳定性和动态特性的影响。
2. 掌握串联校正装置的设计方法和参数调试技术。
二·实验要求1. 观测未校正系统的稳定性和动态特性。
2. 按动态特性要求设计串联校正装置。
3. 观测加串联校正装置后系统的稳定性和动态特性, 并观测校正装置参数改变对系统性能的影响。
4.对线性系统串联校正进行计算机仿真研究, 并对电路模拟与数字仿真结果进行比较研究。
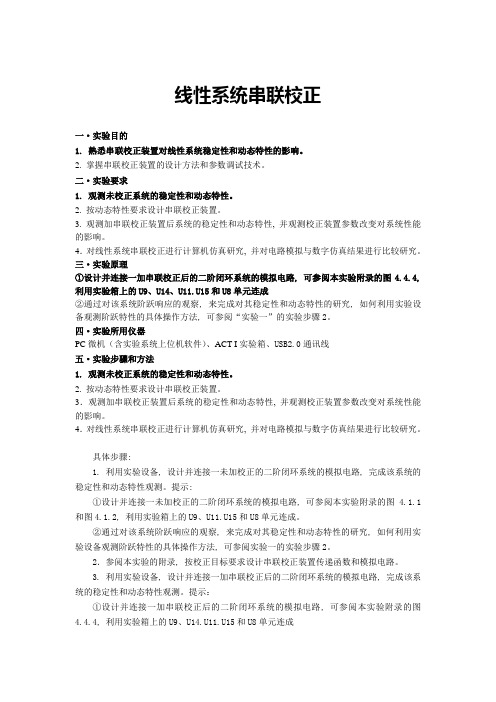
三·实验原理①设计并连接一加串联校正后的二阶闭环系统的模拟电路, 可参阅本实验附录的图4.4.4, 利用实验箱上的U9、U14、U11.U15和U8单元连成②通过对该系统阶跃响应的观察, 来完成对其稳定性和动态特性的研究, 如何利用实验设备观测阶跃特性的具体操作方法, 可参阅“实验一”的实验步骤2。
四·实验所用仪器PC微机(含实验系统上位机软件)、ACT-I实验箱、USB2.0通讯线五·实验步骤和方法1. 观测未校正系统的稳定性和动态特性。
2. 按动态特性要求设计串联校正装置。
3.观测加串联校正装置后系统的稳定性和动态特性, 并观测校正装置参数改变对系统性能的影响。
4.对线性系统串联校正进行计算机仿真研究, 并对电路模拟与数字仿真结果进行比较研究。
具体步骤:1. 利用实验设备, 设计并连接一未加校正的二阶闭环系统的模拟电路, 完成该系统的稳定性和动态特性观测。
提示:①设计并连接一未加校正的二阶闭环系统的模拟电路, 可参阅本实验附录的图 4.1.1和图4.1.2, 利用实验箱上的U9、U11.U15和U8单元连成。
②通过对该系统阶跃响应的观察, 来完成对其稳定性和动态特性的研究, 如何利用实验设备观测阶跃特性的具体操作方法, 可参阅实验一的实验步骤2。
2.参阅本实验的附录, 按校正目标要求设计串联校正装置传递函数和模拟电路。
3. 利用实验设备, 设计并连接一加串联校正后的二阶闭环系统的模拟电路, 完成该系统的稳定性和动态特性观测。
zdkz

实验五连续系统串联校正一、实验目的1. 加深理解串联校正装置对系统动态性能的校正作用。
2. 对给定系统进行串联校正设计,并通过模拟实验检验设计的正确性。
二、实验仪器1.EL-AT-II型自动控制系统实验箱一台2.PC计算机一台三、实验内容1.串联超前校正(1)系统模拟电路图如图5-1,图中开关S断开对应未校情况,接通对应超前校正。
图5-1 超前校正电路图(2)系统结构图如图5-2图5-2 超前校正系统结构图图中 Gc1(s)=22(0.055s+1)Gc2(s)=0.005s+12.串联滞后校正(1)模拟电路图如图5-3,开关s断开对应未校状态,接通对应滞后校正。
图5-3 滞后校正模拟电路图(2)系统结构图示如图5-4图5-4 滞后系统结构图图中 Gc1(s)=1010(s+1)Gc2(s)=11s+13.串联超前—滞后校正(1)模拟电路图如图5-5,双刀开关断开对应未校状态,接通对应超前—滞后校正。
图5-5 超前—滞后校正模拟电路图(2)系统结构图示如图5-6。
图5-6超前—滞后校正系统结构图图中 Gc1(s)=66(1.2s+1)(0.15s+1)Gc2(s)=(6s+1)(0.05s+1)四、实验步骤1.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
超前校正3.连接被测量典型环节的模拟电路(图5-1)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4.开关s放在断开位置。
5.选中 [实验课题→连续系统串联校正→超前校正] 菜单项,鼠标单击将弹出参数设置窗口。
系统加入阶跃信号。
参数设置完成后鼠标单击确认测量系统阶跃响应,并记录超调量σp和调节时间ts。
6.开关s接通,重复步骤5,将两次所测的波形进行比较。
并将测量结果记入下表中:滞后校正7.连接被测量典型环节的模拟电路(图5-3)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验地点:第一实验楼1503、1505房间
温馨提示:各自打印一份带到实验教室,带上自己的U盘
为方便实验报告撰写,
请同学们将自己的实验数据存储到自己的U盘中
逐字阅读要求,按照要求做,特别提醒按时提交实验报告
实验报告要求:
(1)写清学号、姓名、班级、专业、实验日期
(2)字体要求:宋体五号
(3)实验报告内容包含:实验标题、实验要求(目的)、实验步骤、仿真结果、结果分析、实验小结
希望同学们独立实验、独立分析、给出独立见解。
实验报告分为电子档和纸质档。
(1)电子档提交时间:2015年6月11日
电子档提交方式:每位同学将word文档发给董茜茜
文档命名方式:班级名称_学号_姓名_第*次实验.doc
(2)纸质档提交时间另行通知。
实验箱使用说明:
1、启动计算机;
2、连接自动控制系统实验箱和计算机数据线;
3、确认无误后打开实验箱电源;
4、在桌面双击 [自动控制试验系统] 运行软件。
5、测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
【调试前关闭实验箱电源,禁止带电操作,后果自负】
实验三连续系统串联校正
一、实验目的
1. 加深理解串联校正装置对系统动态性能的校正作用。
2. 对给定系统进行串联校正设计,并通过模拟实验检验设计的正确性。
二、实验仪器
1.EL-AT-III型自动控制系统实验箱一台
2.计算机一台
三、实验内容
1.串联超前校正
(1)系统模拟电路图如图5-1,图中开关S断开对应未校情况,接通对应超前校正。
图5-1 超前校正电路图
(2)系统结构图如图5-2
图5-2 超前校正系统结构图
图中 Gc1(s)=2
2(0.055s+1)
Gc2(s)=
0.005s+1
2.串联滞后校正
(1)模拟电路图如图5-3,开关s断开对应未校状态,接通对应滞后校正。
图5-3 滞后校正模拟电路图
(2)系统结构图示如图5-4
图5-4 滞后系统结构图
图中 Gc1(s)=10
10(s+1)
Gc2(s)=
11s+1
3.串联超前—滞后校正
(1)模拟电路图如图5-5,双刀开关断开对应未校状态,接通对应超前—滞后校正。
图5-5 超前—滞后校正模拟电路图
(2)系统结构图示如图5-6。
图5-6超前—滞后校正系统结构图
图中 Gc1(s)=6
6(1.2s+1)(0.15s+1)
Gc2(s)=
(6s+1)(0.05s+1)
四、实验步骤
1.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信
正常后才可以继续进行实验。
超前校正:
3.连接被测量典型环节的模拟电路(图5-1)。
电路的输入U1接A/D、D/A卡的DA1输出,
电路的输出U2接A/D、D/A卡的AD1输入,将将纯积分电容两端连在模拟开关上。
检查无误后接通电源。
4.开关s放在断开位置。
-
5.在实验项目的下拉列表中选择实验五[五、连续系统串联校正]。
鼠标单击按钮,
弹出实验课题参数设置对话框。
在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果,并记录超调量σp和调节时间ts。
6.开关s接通,重复步骤5,将两次所测的波形进行比较。
并将测量结果记入下表中:
滞后校正:
7.连接被测量典型环节的模拟电路(图5-3)。
电路的输入U1接A/D、D/A卡的DA1输出,
电路的输出U2接A/D、D/A卡的AD1输入,将纯积分电容两端连在模拟开关上。
检查无误后接通电源。
8.开关s放在断开位置。
9.在实验项目的下拉列表中选择实验五[五、连续系统串联校正]。
鼠标单击按钮,
弹出实验课题参数设置对话框,在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果,并记录超调量σp和调节时间ts。
10.开关s接通,重复步骤9,将两次所测的波形进行比较。
并将测量结果记入下表中:
超前--滞后校正
11.连接被测量典型环节的模拟电路(图5-5)。
电路的输入U1接A/D、D/A卡的DA1输
出,电路的输出U2接A/D、D/A卡的AD1输入,将纯积分电容两端连在模拟开关上。
检查无误后接通电源。
12.开关s放在断开位置。
13.在实验项目的下拉列表中选择实验五[五、连续系统串联校正]。
鼠标单击按钮,
弹出实验课题参数设置对话框,在参数设置对话框中设置相应的实验参数后鼠标单
击确认等待屏幕的显示区显示实验结果,并记录超调量 p和调节时间ts。
14.开关s接通,重复步骤13,将两次所测的波形进行比较。
并将测量结果记入下表中:
五、实验小结。