全阶磁链观测和定子参考电压矢量预测的异步电动机SVM—DTC系统研究
一种改进的异步电机DTC_SVM控制系统研究
控 制策 略 ,将传 统 的非零 空 间 电压矢 量进 一步 细分 ,并 推 导 了任 意 空 间 电压 矢量 合成 方法 ,给 出了基 于矢 量细 分的 DT C S VM 控制 系统模 型 。仿真 结果 表 明,该 系统 能提高 转矩 和磁链 控制 精度 ,同时有 效 降低 转 矩低 速脉 动 ,提 高系 统低速 运行 稳定 性 。 关键 词 :矢量细 分 S VM 异 步 电机 直接转 矩控 制 文章 编号 : 1 0 0 3 . 4 8 6 2( 2 0 1 3 )0 4 . 0 0 4 4 . 0 3
o f a r b i t r a r y s p a c e v o l t a g e v e c t o r . T h e DT C _ S V M s y s t e m mo d e l i s b u i l t w i t h v e c t o r s u b d i v i s i o n . S i mu l a t i o n r e s u l t s s h o w t h a t t h e t o r q u e a n d lU f X l i n k a g e c D f D , p r P c f D a r e s i g n i ic f a n t i m p r o v e me n t , t h e t o r q u e r i p p l e
将 非 零 空 间 电压 矢 量 进 一 步 细 分 , 达 到 了 l 2
矩 脉 动 较 大 的缺 点 】 。 国 内外 研 究 学 者 围绕 改 善
i s r e d u c e d a n d t h e s t a b i l i t y a t l o w s pe e d i s i m pr o v e d Ke y wo r d s : v e c t o r s u b d i v i s i o n ; SV M ;a s y n c h r o n o u s mo t o r ;d i r e c t t o r q u e c o n t r o l
非恒值磁链幅值给定SVM-DTC系统改进磁链观测器

非恒值磁链幅值给定SVM-DTC系统改进磁链观测器郭梓浩;刘凤春【期刊名称】《微特电机》【年(卷),期】2018(046)002【摘要】针对非恒值磁链幅值给定的永磁同步电动机基于空间电压矢量调制的直接转矩控制(SVM-DTC)系统,传统的第二类改进型积分器不能对磁链进行准确观测,且电动机输出性能差.提出了一种变限幅的改进型积分器,实现在非恒值磁链幅值给定SVM-DTC系统的磁链准确观测,电动机运行稳定并能提高功率因数.%For permanent magnet synchronous motors direct torque control system based on space vector modulation (SVM-DTC) with inconstant flux amplitude reference,conventional modified integration with constant amplitude limiter could not observe the stator flux accurately,and had bad output performance.A new modified integration with variable amplitude limiter was proposed to observe the stator flux accurately in the SVM-DTC system with inconstant flux amplitude reference,it also can improve stability and power factor of the motor.【总页数】5页(P56-60)【作者】郭梓浩;刘凤春【作者单位】大连理工大学,大连116024;大连理工大学,大连116024【正文语种】中文【中图分类】TM351【相关文献】1.非恒定磁链幅值给定的永磁同步电机直接转矩控制 [J], 唐校;杨向宇;赵世伟;胡致远2.一种新的直接转矩控制的定子磁链幅值给定机制 [J], 刘红伟;范永坤;熊皑3.基于新型磁链观测器的PMSM SVM-DTC系统仿真 [J], 严卫生;林海;吴涛;严卫4.不同定子磁链幅值给定下的永磁同步电机直接转矩控制 [J], 樊明迪;杨阳;杨勇;谢门喜5.基于磁链预测的PMSM无磁链环SVM-DTC研究 [J], 金振;杨建飞;邱鑫;张永民;葛浩锐;白晨光因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊自适应控制的无轴承异步电动机SVM-DTC运行控制

tr u ,f x a d Roo ipa e n h n c mp e i h r dt n D t o . A d i as mp o e h y tm o q e l n trd s lc me tw e o a d w t t e ta i o TC meh d u r h i n t lo i r v s te s se
W i e f zy ag rt m ,i i a y t b an t e c nr lv l g o o e to e f x a d tr u e p ci ey T o t t u z l oi h h h t s e s o o ti h o to ot e c mp n n f t u n o q e r s e t l . w a h l v
无 轴承异 步 电动机 作 为 一种 集 驱 动 与悬 浮 功 能于一体的新型磁悬浮电动机¨ , J 由于悬浮控制绕
V c r dli ,V 技 术应用 到 直接转矩 控 制 et uao S M) o Mo tn 中 , 以大 大 减 小转 矩 脉 动 和 得 到 固定 的 开关 频 可
vlg et saheera — ieajs n n o eted trac rbe s ntru o n u o. h e oaevc r ci e t dut t dsl iubnepo l qel padf x opT ed— t o v l m me a v h s m i o o l l
基于全阶状态观测器的无速度传感器DTC系统
X IGuo hu , — a SH EN on pi , U H g— ng Y Sho — i GU IW e— a u y , ihu
( .S h o f I f r t nS in ea d En n eig,CSU,Ch n sa 4 0 8 , 1 c o l n o ma i ce c n giern o o a g h 1 0 3 Hu’ a n n,C ia; hn
l we f o ro t r sa o e it n e c n i c e s h b e v re r ri h w p e a i l ,S r e O i c e s mo o t t rr ss a c a r a e t eo s r e ro t e l s e d r pd y O i o d rt r a e n n o n n e t t r cso ,t e o s r e h u d e t t t t rr s sa c tt e s metme h n i c n ma e s r h t s i e p e ii n h b e v rs o l s i e s a o e it n e a h a i ,t e a k u e t a ma ma t t e s se a s a e p re tc a a t rsi n t e lw p e .Th mu a e e p rme t r s l a i a e t a h h y t m lo h v e f c h r c e itci h o s e d e e l t x e i n e u t v l t h tt e s d s h me h v e f c t t y a c p r o ma c n p e si t r c s n i h w p e . c e a ep re ts a i d n mi e f r n ea d s e d e t c ma ep e ii n t e l o o s e d Ke r s f l o d r s a e o s r e ; ie tt r u o t o ; p e e s r s ; a u o t b l y t e r ywo d : u l r e t t b e v r d r c o q e c n r l s e d s n o l s Ly p n v S sa i t h o y — e i
异步电动机的SVMDTC控制
同,这一点对于直接转矩控制系统尤为重要;从图5{
(b)和图6(b)可以看出,在转子电阻参数变化情况}
下,观测器也能实现磁链跟踪,而且稳态跟踪误差几!
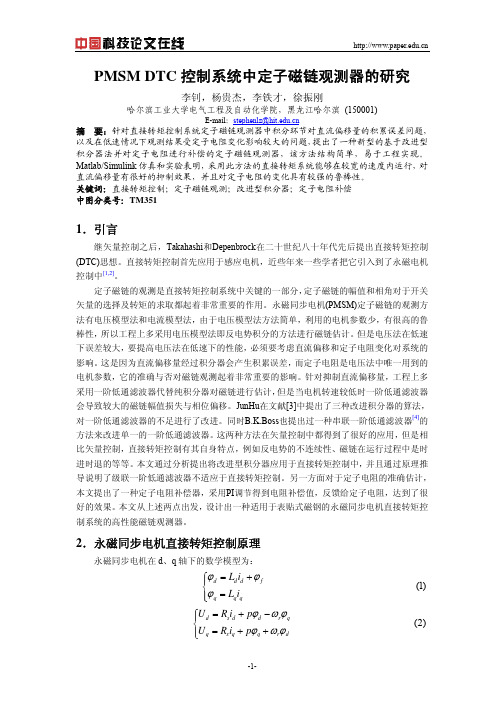
圈4蠡为正整数时观测器极点变化轨迹
乎为零,由此看出转子电阻参数变化对定子磁链稳i霆 态值几乎没有影响;由此看出,在单自由度极点配置;皇
方法下,全阶磁链观测器对定、转子参数变化具有很l税 强的鲁棒性。从图7、图8可以看出,与BAsIc—DTc;髻
J
S
(2)
X=
||}2l 七3I
k
后32 I|}42
(7)
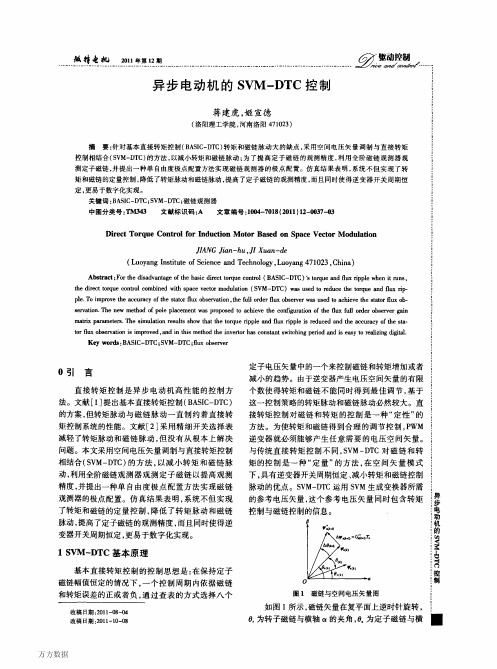
SVM—DTC利用转矩和磁链的偏差通过两个PI
调节器,分别生成电压空间矢量的切向分量和径向 分量,然后由SVM生成逆变器的开关信号,使得转
kl
矩和磁链脉动大大减少。与基本直接转矩控制不
同,sVM—DTC不是用查表的方式来实现电压空间
3状态观测器极点配置方法
系统矩阵A一解的极点位置"墙J。如果所选矩阵A 一胛的特征值使得误差向量的动态特性渐进稳定
且足够快,则任意误差向量都将以足够快的速度收
敛于零(原点)。误差向量e的收敛速度取决于系
统矩阵A一翮的极点位置,通过增益矩阵K可以配
置观测器需要的任意极点位置。 式(7)的增益矩阵K有八个位置参数,极点配
置极为复杂,文献[9]把其参数缩减为四个,文献
图6定子磁链误差
这样,增益矩阵只有一个参数,在新型配置方法 情况下,极点配置更为方便快捷有效。
从图3可以看出,观测器的极点是共轭复极点,
其对应分量是衰减振荡的。极点值的实部决定观测
器的快速性,虚部与实部之比决定观测器的稳定性。 从图4可以看出,当五从l增加到1l(增量为1)时,
PMSM DTC控制系统中定子磁链观测器的研究
的磁链矢量ϕ 的值就会减小并向逆时针旋转,直到重新与反电势正交。当 γ 角小于 90°时分
析方法相似。因此自适应积分器可以自动调整补偿磁链的幅值来达到消除直流偏移量的目 的。
-3-
β emf α
γ
ϕ2 ϕ2'
γ
PMSM DTC 控制系统中定子磁链观测器的研究
李钊,杨贵杰,李铁才,徐振刚
哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 (150001)
E-mail:stephenlz@
摘 要:针对直接转矩控制系统定子磁链观测器中积分环节对直流偏移量的积累误差问题, 以及在低速情况下观测结果受定子电阻变化影响较大的问题,提出了一种新型的基于改进型 积分器法并对定子电阻进行补偿的定子磁链观测器,该方法结构简单,易于工程实现。 Matlab/Simulink 仿真和实验表明,采用此方法的直接转矩系统能够在较宽的速度内运行,对 直流偏移量有很好的抑制效果,并且对定子电阻的变化具有较强的鲁棒性。 关键词:直接转矩控制;定子磁链观测;改进型积分器;定子电阻补偿 中图分类号:TM351
-2-
由于电机的机电时间常数远大于电磁时间常数,使得定子磁链瞬时转速变得比转子磁链 转速大,造成定转子磁链之间夹角瞬时增加,转矩迅速增大,反之亦然。这说明了磁链运行 状态是时进时退的,这样在磁链基波信号上必然会叠加上高频信号。另外,直接转矩控制中 反电势是通过定子绕组外加电压减去电阻压降求得的,定子绕组外加电压为六个电压矢量组 成的跳变信号,而电机中由于电感的作用电流为连续值,所以它们的差反电势为非连续的跳 变信号。
ϕ1
ϕ
ϕ'
基于全阶磁链观测器的异步电机无速度传感器矢量控制系统

( De igCo p rO e Ja g i o p r . t. xn 3 2 4 J n x, hn ; h nIsi t o Maie 1 xn p e r , in x p e C Co L d De ig3 4 2 , a g i C ia 2Wu a t ue f r n t n
船 电技 术 l 控制技术
V13 o3 013 o.1 . N 21.
基 于全 阶磁链 观测 器 的异 步 电机 无速 度 传感 器矢 量控 制 系 统
李 立 明 刘 忠 举
武汉 4 06 ) 3 04 ( 江 西 铜 业 股 份 有 限 公 司 德 兴 铜 矿 ,德 兴 3 4 2 ; 中国船 舶重 工 集 团公 司第 七一 二研 究 所 , I 32 4 2
摘 要 : 设 计 了 一 种 基 于全 阶 观 测 器 的 自适 应 磁 链 观 测 器 , 通 过 引 入 定 子 电 流 反 馈 使 观 测 器 对 电机 参 数
具 有 一 定 的 鲁 棒 性 , 减 少 了 电 机 参 数 的 误 差 以 及 参 数 在 运 行 过 程 中 的 变 化 对 磁 链 观 测 准 确 性 的 影 响 。 同
关键 宇 :异 步 电机
矢 量控 制 全 阶磁链 观 测模 型 无速 度传 感 器
文献 标识 码 :A 文 章 编 号 : 1 0 . 8 2(0 1 0 .0 20 0 34 6 2 1) 30 4 .3
中图分 类号 :T 0 . T 2 3 M3 12 P 7
Se s r e sVe t rC o r l s e o n n o l s c o nt o Sy t m fI du to o o cin M t r Us n i g a Ful O r e bs r r l d rO e ve
异步电动机矢量控制_FOC_和直接转矩控制_DTC_方案的比较
异步电动机矢量控制_FOC_和直接转矩控制_DTC_方案的比较首先,我们来看看FOC方案。
FOC方案是基于电机矢量控制理论而发展起来的一种控制方法,在控制异步电动机时,可以通过精确测量和控制转子磁链矢量的方向和大小,来实现精确控制电机的转矩和转速。
其核心思想是将电动机的三相定子电流进行矢量拆分,分为一个磁场矢量和一个转矩矢量,从而实现转子磁链方向和大小的控制。
FOC方案的优点是控制精度高,响应速度快。
由于可以实时测量和控制电机的磁链矢量,FOC方案可以精确控制电机的转矩和转速。
此外,由于转子磁链矢量可以根据需要即时调整,FOC方案可以快速响应转矩和速度的变化,从而适用于需要快速响应和精确控制的应用。
然而,FOC方案也存在一些缺点。
首先,FOC方案的实现较为复杂,需要进行电流和电压的矢量控制,以及相应的转子定位和速度估算算法。
这些复杂的控制算法在实践中需要较高的计算能力和较多的计算资源,因此实现起来较为困难。
其次,FOC方案对于电机参数和系统模型的准确性要求较高。
由于FOC方案需要测量和控制转子磁链矢量,因此对电机参数和系统模型的准确性要求较高,如果参数不准确,将导致控制性能下降。
接下来,我们来看看DTC方案。
DTC方案是一种基于直接转矩控制原理的控制方法,其核心思想是通过采用转矩和磁链两个控制变量直接控制电机的转矩和速度。
DTC方案通过测量和计算磁链和转矩的误差,根据预定的控制规则直接调节电机的电压和频率,以实现对电机转矩和速度的控制。
DTC方案的优点是实现简单,控制快速。
DTC方案不需要进行电流和电压的矢量控制,只需要测量和控制磁链和转矩的误差,因此实现起来相对简单。
此外,DTC方案由于直接控制电机的电压和频率,可以快速响应转矩和速度的变化,适用于需要快速相应和简单控制的应用。
然而,DTC方案也存在一些缺点。
首先,DTC方案的动态性能较差。
由于DTC方案是基于磁链和转矩误差进行控制的,其控制性能受到不可避免的误差和延迟的影响,因此其动态性能较差,不能达到FOC方案的精确度和响应速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
,
文献 标 志码 :A
文 章 编 号 :10 —8 8 2 1 )00 6 —4 0 164 (0 1 1—0 00
Re e r h o p c co o ulto die tTo qu nto o y c o u s a c n S a e Ve t r M d a in- r c r e Co r lf r As n hr no s M o o nto s d o l Or rFl x Obs r a in a a o t r Co r lBa e n Fu l de u e v to nd St t r
Absr c :To o v t e r b e ta t s le h p o lm o ag u a d tr u i l n h o v n in l ie t tr u o to f lr e f x n o q e rpp e i t e c n e to a dr c o q e c n r l l
以来 ,就以其新颖的控制思想 ,简洁明了的系统结 构和优良的静 、动态性能而备受关注¨ 。传统 D C T
的一个 显著 缺 点是 磁 链 和 转 矩 脉动 大 。存 在 较 大 脉
动 的主要原 因是开 关 表 中有 限 的 电压 矢 量 ,以及 电
制精度 越 高矢 量划 分 就 越 细 ,电 压 矢 量 表 就 越 大 , 增加 了控 制 的复 杂 性 』 。对 定 子 磁链 的观 测 ,采 用 的主要方法 有 “一i 型 、i 模 —n模 型 和 u—n模 型 j 。 i n模 型 和 M—n模 型结 构 复 杂 。u—i 型 结 构 简 — 模 在低 速 时定 子 电阻压 降很 大 ,影 响磁 链 观 测 精度 。同 时 由纯 积 分 环节带 来 的直 流偏 置会 造 成 磁链 估 算 的误 差 。 自
r n t trr fr n e v la e v co i h wa d lt d by S e tsao e e e c otg e trwh c s mo u ae VM ,o tmu c mbi t n o h u d me t l p i m o nai ft e f n a n a o v la e s a e v c o s o t ie n o d rt c urt l o e s t he e r ro tt rfu n o q e o tg p c e trwa b an d i r e o a c aey c mp n ae t ro fsao x a d tr u .Th l e
0 引 言
直 接转矩 控制 ( T 技术 自上世 纪 8 D C) 0年代 问世
制 ( S M) 能 输 出任 意 电 压矢 量 。无 差 拍 控 制依 DV 都
赖 电机参 数 ,计算 量 太 大 ,难 以实 现 J S M 在 。D V 不 同的速度 范 围使 用 了不 同 的 电压 矢 量 ,该 方 法控
i c e e to ttrfu ac lto n r m n fsao x c l ua in.t e sao ee e c o tg e trwa ac lt d Ac o d n o t e c r l h ttrr fF n e v la e v co s c lu ae . c r i g t h u .
smu ai n r s lsv rf h fe tv n s ft e meh d. i lto e u t e i t e ef cie e s o h to y
Ke r y wo ds:a y h o o s moo ;d r c oqu o to ;s a e v co d a in;f bs r ain s nc r n u t r ie ttr e c n rl p c e tr mo ult o l ux o e to v
( T , e ot l t tg d c ep l a rsne .Wi l odr u bevt na dte D C) anw cn o s a yt r uet us w s ee t r r e o e h e p d t f l re f xosra o n h u l i h
第4 4卷 第 1 0期
21 0 1正
赦 '枇 l }
MI CROM OTORS
V0. J.No 1 144 .0
Oc. t201 1
1 O月
全 阶磁 链 观 测 和定 子参 考 电压 矢 量 预 测 的 异 步 电 动 机 S M— T V D C系统 研 究
党存 禄 ,周超 英 ,宋文 超 ,鄢 家财
Re e e c la e Ve t r Ca c l to f r n e Vo t g c o l u a i n
DA u l NG C nu,Z U C a yn HO h o ig,S ONG W e c a ,YAN Ja a nh o ic i
( a zo n e i e nl y L nhu7 0 5 ,C i ) L nhu U i r t o Tc oo , a zo 3 0 0 hn v sy f h g a
( 兰州理工大学 电气工程与信息工程学院 ,兰州 70 5 ) 30 0
摘
要 :针对传统直接转矩控制存在磁链和转矩 脉动大的问题 ,提出 了一种新 的减小 脉动的控制策 略。通过 全阶磁
链观测和定子磁链期 望增量估算计算 出定子 参考 电压矢 量 ,利用 S M技术 获得基本 电压空 间矢量 的优化 组合 ,对 V 转矩和磁链 进行 精确 补偿 。仿真结果验证了该算 法的有效性 。