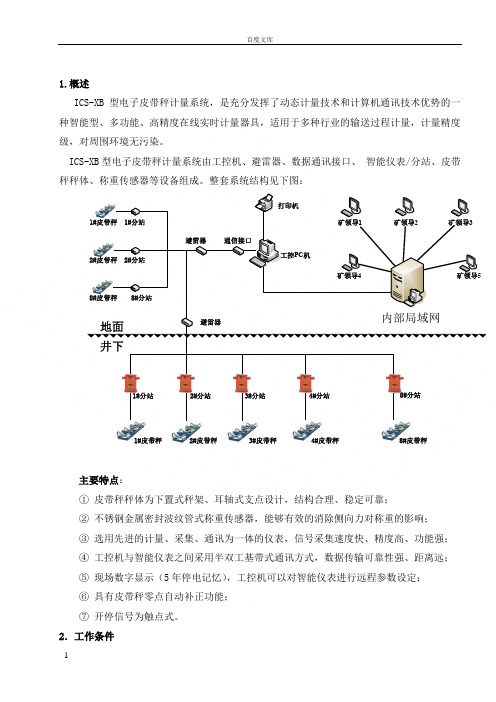
在线称重计量机示意图
T7E中文使用说明书(V1.01)

YH-T7E型称重显示指示器V1.01上海耀华称重系统有限公司制造目录第一章技术参数........................................................................................ - 2 - 第二章安装连接........................................................................................ - 3 -一、仪表示意图............................................................................................ - 3 -二、传感器的连接........................................................................................ - 3 -三、串行通讯接口........................................................................................ - 4 - 第三章操作说明........................................................................................ - 5 -一、开机........................................................................................................ - 5 -二、按键操作说明........................................................................................ - 5 -三、称重操作................................................................................................ - 5 - 第四章标定说明........................................................................................ - 7 - 第五章信息提示出错说明........................................................................ - 8 - 第六章蓄电池的使用................................................................................ - 8 -亲爱的用户:在使用仪表前,敬请仔细阅读说明书!该仪表不宜用于公众贸易场合!!!第一章技术参数1 型号 YH-T7E2 模拟部分输入信号范围 -19mV~19mV转换速度 10 次/秒非线性 0.0015%增益漂移 0.03%供桥电压 DC 5V传感器连接 1~4只350Ω传感器3 显示显示范围 -99999~999999(不考虑小数点)分度值 1/2/5/10/20/50 可选4串行通讯接口信号 RS232信号传输距离<20米5 使用环境电源AC220V;50、60Hz(-2%~+2%)使用温度 -10 °C~40 °C储运温度 -25 °C~55 °C相对湿度≤85%RH保险丝 500mA6 自重约2千克第二章安装连接一、仪表示意图(图2-1) 前盖示意图电源开关交流电源预留232通信传感器(图2-2) 后盖示意图二、传感器的连接1. 传感器的连接采用9芯插头座(孔). 图2-3 标注了各引脚的意义。
D2002E_P、P1、P2_使用说明书

第二章 技术参数 ..................................................................................................................................................2 一、D2002E(P/P1/P2)称重显示器技术指标 ...................................................................................................2
电子皮带秤使用说明书(总)
V+和 K2/F1 两个端子接开停信号,与皮带开关同步的一对无源常开触点相连。 主板上的拨码器为 2 进制,分别为 1、2、4、8。设置仪表编号时将拨码拨至有数码一侧, 如:设置为 4 号仪表,将 3 号拨码拨到 3 一侧,设置 3 号仪表,将 1 和 2 拨码拨到有数字一 侧。
⑹称重监测分站(井下)
1 和我公司数据接口、板卡连接为半双工基带式通讯 2 485 信号输出,可与 485 转 RJ45 连光纤或环网,也可直接与工控机
485 通讯,有效通讯距离 1 公里。 3 4-20 毫安信号输出,输出信号为瞬时流量信号,相应的电流信号对
应的是 吨/小时,常见为与现场 PLC 连接,距离越近信号损耗越小,最好 不要超过 500 米。
工控机是台湾研华原装进口的,供电电源:AC 220V,允许波动电压范围:-10%~20%, 如果现场电压不稳定,要加装电脑专用的 UPS 稳压电源。在正常使用时,机器要每天 24 小时开机。每套系统可以带 8 台秤。 ⑵ 板式主站卡
板卡是安装在工控机内的底板上的,接收采集数据信号并传送至计量程序。板卡上有 2 个 8 位拨码器。靠近 15 针插头的拨码器将 4 和 8 拨至有数字的一侧,表示地址码为 220, 另一个拨码器将所有的端子拨至有数字一侧,表示可以通讯 8 台秤。 ⑶ 数据通讯接口(红),F2(绿),∧(黄),∨(蓝)
RET
复位到初始显示状态;结束参数修改。
F1
显示累积量(P),流量(F)。
切换显示系数(K,显示为 E),零点值(U0),传感器当前信号值(U1), F2
带速(L),皮带周期(H),皮带一周信号最大值和零点值的差值(U2)。
信号值和零点值的差值 U2; 14.带速 :显示 皮带 设定速度 值 (L1),单 位:cm; 15.周期 :显示 皮带 运转一周 所需的 时间 (状态或停止计量状态; 17.打印 :锁操作面板,解锁:依次按 <停|开><打印><F2><F1><∧><∨><确认>; :备用; 19 复位:功能 1 为复位主机,主机复位后显示累计量 P 值,功能 2 为配合累计、K
上海耀华称重系统 XK3190-C2 称重显示器 说明书
称重显示器
2005 年 11 月版
上海耀华称重系统有限公司制造
公司地址:上海浦东新区上南路 4059 号
销售部直线电话:(021) 58863788
50840546 50842579
58411284
50842876
50840434 58862570
50823184
58491310 50824201 50824202 50824203
4
X K 3 1 9 0-C 2
串行通讯接口采用 RS232C(标准产品),本公司可根据客户的特殊需要,选配 RS422 接口。(输 出格式与 RS232C 相同)。接口采用 15 芯插头座,(与大屏幕共用一只插座),其引脚意义见图 3-5 中 6、7、8 脚。本仪表可选择连续发送或指令应答方式:
亲爱的用户: 在使用仪表前,敬请阅读本使用说明书。
X K 3 1 9 0-C 2
第一章 概 述
XK3190-C2 称重显示控制器采用 MCS—51 单片微处理器及高精度高速度的Σ-△A/D 转换技术, 对重量进行转换显示,可方便地与电阻应变式传感器连接组成定量、累计和包装秤。可广泛应用于 商业,工矿企业,仓储码头等多种计量场合。
六、键盘功能说明
1、参数设置时 【输入】:确认设置的参数; 【称重】:退出参数设置,直接返回称重显示; 【置零】:在多步参数设置时,不保存当前参数,回退到上个参数的设置;
2、一般功能
5
X K 3 1 9 0-C 2
【检查】:检查累计量; 【日期】:检视及修改当前日期; 【打印】:打印当前重量; 【累计】:累计当前重量; 【加料】:一次手动加料; 【功能】:进入参数设置及标定; 【启动】:使系统进入自动控制状态; 【暂停继续】:暂停控制状态,再按一次继续。
电子皮带秤(称重传感器、测速传感器、积算器)
(称重传感器、测速传感器、积算器)
ICS-10-17
使用说明书
徐州科利达电控科技有限公司
感谢您使用徐州科利达电控科技有限公司生产的电子皮带秤。
本使用说明书所述内容不仅适用于用户,也能为产品的安装和检修人员提供参考。
安装和使用电子皮带秤前请您仔细阅读。
请认真保留本使用说明书,以备参考。
2 工法特点
2.1皮带秤采用“整体安装法”。安装工艺简单,便于实施、施工周期短等优点,应用前景十分广泛。
2.2皮带秤的校验采用“链码标定法”。
2.2.1链码标定装置,由滚球、链片、内外连板和挂环等组成,其材质为不锈钢。
2.2.2利用“链码标定法”校验电子皮带秤校验精度高(静态0.03%,动态0.1%),操作简单方便,工作效率高。
5.器和称重域托辊必须处于自由状态,无卡涩现象;
5.3.4安装和焊接传感器套件时必须取出传感器;
5.3.5安装传感器时应将上、下套件可靠的用接地线连接。
5.3.6传感器安装就位后,禁止在其周围使用电焊。
5.4电气回路检查
5.4.1首先检查整个系统回路接线是否正确。接线是否有松动、虚接现象。称重系统接线如图5.4.1-1所示.
9.7施工余废料及时清理回库,让现场保持干净。
9.8爱护现场已安和未安的所有设备、构件不受损,并坚决抵制不文明的行为。
9.9施工人员进入施工现场,必须做好标准化作业施工,正确使用安全帽、工作服等劳动防护用品。
9.10施工现场用水、用电设施的安装和使用符合安装规范和安全操作规程,并按施工组织设计进行接(架)设,临时接用要提出申请,按批复实施,严禁随意接水、接电。
2.测量皮带转n圈的时间,要求时间最好大于6分钟
8第八章 称重系统
三、自动控制功能分析
禁止比较判别是在两级给料方式下,前级给料结束后,不 是马上判别重量是否达到末级给料关门值,而是延时一段 时间,在此时间内并不判别重量是否达到末级给料关门值, 延时时间到后才开始判断,从而避开前级给料的冲击在秤 上造成的波峰。 采用这种控制方法,能够使前级给料值最接近末级给料值, 也就是增大了前级给料量,相对减少了末级给料,从而缩 短了整个工作周期,提高秤的工作效率,可以证明,前级、 末级料流流盈比越大,效果越显著;
完整的包装秤由给料装置、称重系统、卸料装置、夹袋装 置、封口装置、喷码装置组成,并且配用相应的仪表、气 路。 包装秤还有一个辅助装置料仓,它的主要作用是暂存物料。 对其形状没有什么特殊的要求。一般选用漏斗状料仓,便 于下料。 给料部分形式较多, 通常有直落式、螺旋给料、刮刀式、 振动式和皮带给料,根据物料和厂房的不同可选择不同的 方式。这一部分选择是否合适直接影响到定量包装机的包 装速度和精度。
三、自动控制功能分析
分组检测就是应用数据统计原理及误差分析,对称重数据 进行抽检。定量包装的误差由系统误差及随机误差两部分 组成,总误差为两部分各自绝对值之和。系统误差的方向 常表现为固定的,而随机误差分布具有单峰、对称、有界、 抵偿性质。根据这一特性,应用数理统计原理,我们把整 个包装秤的工作过程分为检测组和不检测组。检测组和不 检测组是相邻的,不检测组即抽样组,在检测组中记录秤 体稳定时的满秤值和空秤值,然后把这一组数据的代数平 均值,作为自动控制依据,去控制下一相邻的不检测组及 下一检测组的控制过程,适当选取检测组及不检测组的个 数,就可以控制抽样的样本数及采样间隔。采用这样的方 法,可以减小随机测量误差的影响,而在不检测组中由于 不需记录秤重数据,所以不必等待秤体稳定,从而节省时 间,提高效率。
电子秤原理及电子秤原理图(打印版)

电子秤原理及电子秤原理图一、名词解释利用作用于物体上的重力来测量该物体质量(重量)的计量仪器,装有电子装置的秤为电子秤。
二、工作原理秤重物品经由装在机构上的重量传感器,将重力转换为电压或电流的模拟讯号,经放大及滤波处理后由A/D处理器转换为数字讯号,数字讯号由中央处理器(CPU)运算处理,而周边所须要的功能及各种接口电路也和CPU连接应用,最后由显示屏幕以数字方式显示。
电子秤原理图:三、主要组成组件1.重量传感器2.放大器电路3.滤波器电路4.模拟数字转换器5.中央处理器6.电源供应电路7.按键8.外壳9.机构 10.秤盘电子秤设计2(2006-05-05 09:08:26)第五部分:附录电子秤的信号采集、处理、显示的程序 .#include <reg52.h>#include<absacc.h>//ad 控制线#define ad_244 XBYTE[0xbfff];sbit ad_stb=P3^3;sbit ad_start=P1^1;//lcd 控制线sbit lcd_di=P1^7;sbit lcd_rw=P1^2;sbit lcd_e=P1^0;//7289 控制线sbit cs7289=P1^3;sbit clk7289=P1^4;sbit dio7289=P1^5;//sbit key7289=P1^6; //7289 查询方式sbit key7289=P3^2; //7289 中断方式sbit baoj=P3^5;//7289 子程序void ini_7289(void);void send7289(short);short receive(void);void keyin(void);//lcd 子程序void ini_lcd(void);void lcdd_send(short); void lcdi_send(short); void chk_busy(void);//ad 子程序void ad(void);void baojing(void);void d_change(long);// 初始化,编号,日期void ini();void error1(void);void nop1(){}void change(s)int dealy; // 全局变量short sh=0; // 商品号short dot=0; // 小数点标志bit list=0;short qb=0;char xdata shuju[7]=""; short xdata bcd[5];char xdata s1[16]=" 单价 : 元 ";char xdata s2[16]=" 重量 : Kg";char xdata s3[16]=" 金额 : 元 ";char xdata s4[16]=" 累计 : 元 ";char code message0[]=" 信息学院山东大学 ";char code message1[]=" 输入收银员代号 :";char code message2[]=" 输入日期 :";char code message3[16]=" -- 山东大学 -- ";char code message5[16]=" 垃圾公司欢迎您 !!";char xdata bianhao[16]=" 收银员: ";char xdata riqi[16]=" - - ";long int xdata zongjia=0,jine=0,jine1=0;int xdata shizhong=0,pizhong=0,zhongliang=0;long int xdata qingdan[20][4];char code shangpin[11][4]={{" 单价 "},{" 苹果 "},{" 梨 "},{" 花生 "},{" 大米 "}, {" 桃子 "},{" 塑料 "},{" 瓜子 "},{" 桔子 "},{" 香蕉 "},{" 玉米 "}};long int xdata danjia[11]={0,2,3635,5502,0,3320,5502,660,3210,6600,5600};char xdata jiage[6]={0x0,0x0,0x0,0xfe,0x0,0x0}; // 0.00short xdata xiuzheng[]={0,2,5,6,7,8,9,12,13};char s[16];{s[6]=shuju[0];s[7]=shuju[1];s[8]=shuju[2];s[9]=shuju[3];s[10]=shuju[4];s[11]=shuju[5];s[12]=shuju[6];}//**************************************************************** void main(){short i,j;long int x,z;int y;int xdata duilie[3]={0};P1=0xff;ini_lcd(); // 初始化 LCDlcdi_send(0x8a);while(message0[i]) lcdd_send(message0[i++]);ini_7289(); // 初始化 7289pizhong=ad1();lcdi_send(0x1); // 总清屏ini(); // 初始页面 , 收银员编号,日期lcdi_send(0x1); // 总清屏EA=1;EX0=1; // 中断//EX1=1;//ad_start=1;while(1){if(list){lcdi_send(0x80); // 显示单位名称for(i=0;i<16;i++) lcdd_send(message3[i]); x=qingdan[0][0]; // 商品名单价for(i=0;i<4;i++) s1[i]=shangpin[x][i];x=qingdan[0][1];d_change(x); change(s1);lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s1[i]);x=qingdan[0][2]; // 显示重量d_change(x); change(s2);s2[10]=s2[9];s2[9]='.';if(s2[8]==32) s2[8]=0x30;lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s2[i]);x=qingdan[0][3];d_change(x); change(s3);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(s3[i]); // 以上为第一页EA=0;EX0=0; // 关键盘中断for(j=1;j<qb;j++){while(key7289);x=qingdan[j][2];d_change(x); change(s2); // 显示数据s2[10]=s2[9];s2[9]='.'; if(s2[8]==32) s2[8]=0x30;lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s2[i]);x=qingdan[j][1];d_change(x); change(s1);x=qingdan[j][0];for(i=0;i<4;i++) s1[i]=shangpin[x][i];lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s1[i]);x=qingdan[j][3];d_change(x); change(s3);lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s3[i]);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(0x20);lcdi_send(0x98);while(key7289==0);}while(key7289);d_change(zongjia); change(s4);lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s4[i]);lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(bianhao[i]); lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(message5[i]); lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(riqi[i]);list=0;while(key7289==0);while(key7289==1);while(key7289==0);EA=1;EX0=1;}else{ y=0;/* duilie[2]=duilie[1]; // 数字滤波duilie[1]=duilie[0];y=ad1();duilie[0]=y>>1;x=duilie[0];x=x<<1;x=x+duilie[1]+duilie[2]; */zhongliang=ad1();shizhong=zhongliang-pizhong; // 数据转换x=danjia[sh];jine1=shizhong*x;jine=jine1/1;d_change(shizhong); change(s2); // 显示数据s2[10]=s2[9]; s2[9]='.';if(s2[8]==32) s2[8]=0x30;lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s2[i]);d_change(danjia[sh]); change(s1);for(i=0;i<4;i++) s1[i]=shangpin[sh][i]; lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s1[i]);d_change(jine); change(s3);lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s3[i]);d_change(zongjia); change(s4);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(s4[i]);lcdi_send(0x98);//while(1);}}}void keyin(void) interrupt 0 using 0 // 中断 0 服务程序{char X,i;long int y;send7289(0x15); // 接收数据X=receive();cs7289=1;X=X&0x1f;switch(X){case 0xf : {zongjia=zongjia+jine;qingdan[qb][0]=sh;qingdan[qb][1]=danjia[sh];qingdan[qb][2]=shizhong;qingdan[qb][3]=jine;qb++; sh=0;dot=0;danjia[0]=0;for(i=0;i<6;i++) jiage[i]=0;}break; // 累加case 0xe : pizhong=zhongliang; break; // 去皮case 0xd : {danjia[sh]=0;dot=0;} break; // 清单价case 0xc : {zongjia=0;jine=0;dot=0;list=0;qb=0;pizhong=0; if(sh==0) danjia[sh]=0;} break; // 总清case 0xa : dot=1;break; // 点case 0xb : list=1;break; // 清单case 0x19 : sh=10;break;case 0x18 : sh=9;break;case 0x17 : sh=8;break;case 0x16 : sh=7;break;case 0x15 : sh=6;break;case 0x14 : sh=5;break;case 0x13 : sh=4;break;case 0x12 : sh=3;break;case 0x11 : sh=2;break;case 0x10 : sh=1;break;case 0x1f :case 0x1e :case 0x1d :case 0x1c :case 0x1a : break;case 0x1b : dot=1;break;default :{ if(dot==0) {jiage[0]=jiage[1];jiage[1]=jiage[2];jiage[2]=X;} if(dot==1) {jiage[4]=X;dot++; }else if(dot==2) {jiage[5]=X; dot++;}else if(dot>2) break;// lcdi_send(0x84);y=jiage[0];y=y*10+jiage[1];y=y*10+jiage[2];y=y*10+jiage[4];danjia[sh]=y*10+jiage[5];}}while(key7289==0); // 等待键盘松开}/*void ad(void) interrupt 2 using 1{short x,y;x=ad_244;y=x;if(x&0x80) baojing();else x=x>>4;y=y&0xf;bcd[x]=y;} */// 初始页面void ini() // 输入收银员编号 , 日期{short i,j;char X;lcdi_send(0x80); // 提示输入收银员编号i=0;while(message1[i]) lcdd_send(message1[i++]); for(i=8;i<12;i++){while(key7289);send7289(0x15); // 接收数据X=receive();cs7289=1;bianhao[i]=X+0x30;lcdi_send(0x93);for(j=8;j<16;j++) lcdd_send(bianhao[j]);while(key7289==0);}lcdi_send(0x88); // 提示输入日期i=0;while(message2[i]) lcdd_send(message2[i++]); for(i=0;i<10;i++) // 输入日期{if(i==4||i==7) i++;while(key7289==1);send7289(0x15); // 接收数据X=receive();cs7289=1;riqi[i]=X+0x30;j=0;lcdi_send(0x9a);for(j=0;j<10;j++) lcdd_send(riqi[j]);while(key7289==0);}while(key7289);nop1();while(key7289==0);nop1();lcdi_send(0x1);}//LCD 子程序void ini_lcd() //LCD 初始化子程序{lcdi_send(0x30);lcdi_send(0x1); // 总清lcdi_send(0xc);lcdi_send(0x2); // 光标右移, AC+1}void lcdd_send(short X) //LCD 发送数据子程序{chk_busy();nop1();lcd_di=1;lcd_rw=0;lcd_e=0;P0=X;for(dealy=0;dealy<5;dealy++);//lcd_e=1; X=X;P0=0xff;}void lcdi_send(short X) //LCD 发送指令子程序{chk_busy();nop1();lcd_di=0;lcd_rw=0;lcd_e=0;P0=X;for(dealy=0;dealy<5;dealy++);//lcd_e=1; X=X;P0=0xff;}void chk_busy(){short i=0xff;while(i&0x80){lcd_di=0;lcd_rw=1;lcd_e=0;i=P0;lcd_e=1;}}//7289 子程序void ini_7289(){short i;cs7289=1; key7289=1; dio7289=1; //7289 初始化子程序for(i=0;i<50;i++)for(dealy=0;dealy<5;dealy++); // 延时 25mssend7289(0xa4); cs7289=1;}void send7289(short X) //7289 发送数据子程序{short i,j=1;cs7289=0;for(dealy=0;dealy<6;dealy++); // 延时 50us for(i=7;i>=0;i--){j=j<<i;dio7289=X&j;j=1;j=1;clk7289=1;for(dealy=0;dealy<1;dealy++) ; // 延时 10us clk7289=0;for(dealy=0;dealy<1;dealy++) ; // 延时 10us }dio7289=0;}short receive() //7289 接收数据子程序{short i,X=0;dio7289=1;for(dealy=0;dealy<6;dealy++); // 延时 50us for(i=0;i<=7;i++){clk7289=1;for(dealy=0;dealy<1;dealy++); // 延时 10usX=X<<1;if(dio7289)X++;clk7289=0;for(dealy=0;dealy<1;dealy++); // 延时 10us }dio7289=0;return(X);}//ad//AD 子程序int ad1(){short k,x;int ad_zhi=0,xz;EA=0;ad_start=1;for(k=0;k<5;k++){ while(ad_stb);x=ad_244;x=x&0xf;ad_zhi=ad_zhi*10+x;}ad_start=0;EA=1;EX0=1;ad_zhi=ad_zhi>>1;xz=ad_zhi-50;xz=xz/100;ad_zhi=ad_zhi+xiuzheng[xz];return(ad_zhi);void d_change(long X){char qian,bai,shi,ge,shifen,baifen; long int yu;if(X>) error1();qian=X/100; yu=X%100;bai=yu/10; yu=yu%10;shi=yu/1; yu=yu%1;ge=yu/100; yu=yu%100;shifen=yu/10;baifen=yu%10;qian=qian+0x30;bai=bai+0x30;shi=shi+0x30;ge=ge+0x30;shifen=shifen+0x30;baifen=baifen+0x30;if(qian==0x30){qian=0x20;if(bai==0x30){bai=0x20;if(shi==0x30) shi=0x20;}}shuju[0]=qian;shuju[1]=bai;shuju[2]=shi;shuju[3]=ge;shuju[4]='.';shuju[5]=shifen;shuju[6]=baifen;}void baojing(){short i;for(i=0;i<50;i++){baoj=0;for(dealy=0;dealy<10;dealy++); baoj=1;for(dealy=0;dealy<10;dealy++);}}摘要本系统采用单片机 AT89S52 为控制核心,实现电子秤的基本控制功能。
灌装机在线称重流程
灌装机在线称重流程初探摘要:灌装机的灌装机构前后分别设置有两套相同的在线称量机构,一是对传送机构上灌装前的西林瓶进行抓取称重后放回,二是对传送机构上灌装后质量的西林瓶进行抓取称重后放回。
经过在线称量系统计算分析,并将灌装误差反馈至灌装机构,进行在线质量校准。
关键词:灌装机;在线称重;流程一、引言灌装机在线称量有两套相同的质量检测装置。
每套质量检测装置均设有称重传感器、质量检测台,以及由伺服运动控制器控制的取瓶夹钳、取瓶旋转主轴和主轴升降机构;称重传感器获得电信号后,输出给在线质量校准控制器,在线质量校准控制器输出实测质量信号及误差信号,并对定量填充系统的填充量进行在线质量校准。
传感器是在线称量技术的核心部件,被誉为“信息装备的特种元件”,是信息技术的三大产业支柱之一,并且是一项适应我国先进生产力发展要求的高技术,是目前我国信息产业发展的重点基础类新型的产业。
但是我国目前的传感技术产业现状远远不能满足国内市场的需要。
据统计,2003年我国用的270万台套压力传感器中,进口的传感器约占了70%,用汇额约30亿美元以上。
国产化的压力传感器仅占20%,而全部采用国内技术生产的传感器却只占了极少的10%的风份额。
我国在环境保护中使用的毒性气体传感器有20万套左右,同样令人遗憾的是进口产品占78%;还有农业及工业用二氧化碳传感器几乎全部依靠进口;而汽车电子用传感器就跟不用说了,除低档车用一些温度、转速、位置、压力传感器国产外,其余的全部靠引进,占到市场总额的90%。
二、在线称重的流程灌装机在线称量的工艺流程有两套相同的在线称量过程和在线质量校准过程组成。
两套相同的在线称量过程一是对传送机构上灌装前的西林瓶进行抓取称重后放回,二是对灌装后的西林瓶进行抓取称重后放回。
经过在线称量系统计算分析,并将灌装误差反馈至灌装机构,进行装量的在线调整。
其工作原理如图1所示,共由36个传感器,18个电机共同完成这个过程。
图1 在线称量工作原理示意图灌装前在线称量流程:当灌装前位置检测装置检测到灌装前西林瓶的到位检测信号时,传送带传送暂停,主轴升降机构电机将取瓶旋转主轴降到位后,取瓶夹钳夹紧灌装前西林瓶再升到位,传送带传送启动,取瓶旋转主轴转送灌装前西林瓶至质量检测台上面,取瓶旋转主轴降到位,取瓶夹钳松放灌装前西林瓶到位后,进行质量检测并输出灌装前西林瓶实测质量输入信号。