移动机器人定位系统设计方案
世界技能大赛移动机器人运动控制系统设计

0引言世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台,比赛项目共分为6个大类,分别为结构与建筑技术、创意艺术和时尚、信息与通信技术、制造与工程技术、社会与个人服务、运输与物流。
移动机器人项目属于制造与工程技术领域的赛事之一,随着制造业的转型升级,技能人才的培养也扮演着越来越重要的角色,为了更好地推广移动机器人项目,让更多的院校参与世界技能大赛,让更多的学生学会利用自动控制技术设计世界技能大赛所需的移动机器人,笔者将几年来对移动机器人电机控制、运动规划方面的一些技巧及实现做了总结,旨在让更多的参与者快速学会对移动机器人的控制,更好地推动移动机器人相关专业的发展。
1系统组成1.1系统基本构成世界技能大赛移动机器人项目一般要求参赛队伍所制作的移动机器人具有较为灵活的移动能力,为了满足这一条件,普遍采用全方位移动的机器人设计。
全方位移动机器人具有全方位运动能力,其实现方式关键在于全方位的轮系结构,该结构具备每一个大轮边缘套有小轮的机构,能够避免普通轮系不能侧滑带来的非完整性运动限制,从而实现全方位运动。
在比赛中,机器人较为常用的底盘是用 3 个全向轮组成的底盘运动控制系统。
其中,三个全向轮运动轴心夹角按照 120°进行设计,之间通过3条横梁互为60°连接构成,如图1所示,底盘三个全向轮由独立的电机驱动。
底盘运动信息主要通过三个360线的编码器和一个9轴陀螺仪获取。
图1 三轮机器人效果图(左)及实物图(右)1.2系统主体框架世界技能大赛移动机器人项目所设计的机器人,既要考虑到实用性,又要考虑到使用提供指定套件来搭建。
整个指定套件提供了4个直流电机、3个舵机、1个陀螺仪、2个超声波传感器、2个红外传感器、2个限位开关,设计的机器人需要依赖于上述提供的电气元件。
笔者所使用的三轮平台由核心控制模块(MYRIO)、传感器检测模块、世界技能大赛移动机器人运动控制系统设计 章安福(广州市工贸技师学院,广州,510000)摘 要世界技能大赛移动机器人项目要求设计的机器人能够在2m×4m的平面场地中完成一定的任务,而全向轮式移动机器人为非完整性约束系统,机器人可向任意方向做直线运动而不需事先做旋转运动,同时可执行复杂的弧线运动。
基于ROS的自主移动机器人控制系统设计
基于ROS的自主移动机器人控制系统设计自主移动机器人是近年来兴起的一种新型机器人,它能够在无人监管的情况下完成一定的任务。
集成控制系统是自主移动机器人的重要组成部分,它可以实现机器人的定位、导航、避障等基本功能。
本文将介绍一个基于ROS(Robot Operating System)的自主移动机器人控制系统设计。
1. ROS简介ROS是一个开源机器人操作系统,它为机器人开发者提供了一套标准化的工具和库,使得机器人软件开发变得更加简单和高效。
ROS是以C++和Python为主要语言开发的,它提供了许多机器人领域常用的功能模块,包括运动规划、感知、控制等。
2. 控制系统的硬件架构自主移动机器人控制系统的硬件架构主要包括机器人本体、传感器、计算机等部分。
机器人本体主要由底盘、电机、轮子等组成,传感器则包括激光雷达、视觉传感器、惯性导航系统等。
计算机可以是嵌入式电脑或者笔记本电脑等。
3. 控制系统的软件设计在ROS中,机器人的控制系统被称为“ROS节点”。
我们需要为机器人的各个模块(底盘、激光雷达、摄像头等)分别创建ROS节点,并在节点之间建立通信机制。
例如,我们可以为底盘设计一个控制节点,为激光雷达设计一个数据处理节点,为摄像头设计一个图像处理节点等。
4. 控制系统的软件框架控制系统的软件框架是ROS节点的整体设计方案,它主要包括节点的定义、通信机制设计、运动规划、障碍物避障等。
在本文中,我们以一个四轮差速机器人为例,介绍自主移动机器人控制系统的软件框架。
(1) 定义节点我们需要为机器人的各个功能模块定义ROS节点,例如底盘控制节点、激光雷达节点、摄像头节点等。
在定义节点时,需要指定节点的名称、输入输出消息类型等。
(2) 通信机制设计在各个节点之间建立通信机制,可以使用ROS的消息机制实现。
节点之间可以发布(Publish)和订阅(Subscribe)消息,实现数据的传输与共享。
(3) 运动规划运动规划是机器人控制系统的重要组成部分,它可以实现自主导航和路径规划。
基于航迹推算的移动式机器人定位系统设计
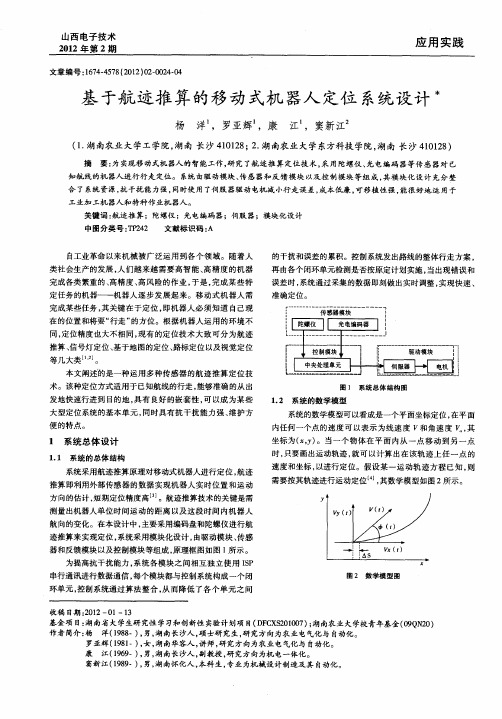
如图 3所示 为 伺服 器系 统 硬件 电路 的 信号处 理单 元。
() 2
㈤ =
.
该 电路包 括了信号 整合 和信号运算 , 中 D 2 L3 C 其 S 6 S 2 M实现 编码盘信号 的整合 , 即把 4路 P WM 信 号 整合 成 2路 P WM 信号 。由于编码盘信号 是由 A、 B两路相 位差为 9 。 P 0 的 WM 组成 , 通过对 D 2 L 3 C S6 S2 M逻 辑使 能 口的电平控 制 , 可实现 输 出端在 A、 B信号超前或滞后 9 。 O 时输 出高 电平或低 电平 , 以此判 断出电机正 反转状态 。L 2 M69为 PD信 号算 法芯 片 , I 通过对编码盘信号运算 和 D 2 L3 C S 6 S 2 M输 出信号状态 分析 , 芯片可发 出信号使 电机一直保持在编码盘 的某一个栅格 处 , 让 电机急停锁死或准确运动所需要的栅格数 , 实现对 机器人 移动 的准确控制 。H P 2 0 C - 62为高速 光耦 芯片 , 目的是减 其
定任务 的机器— —机器人逐 步发展起 来。移 动式机器 人需 完成某些任务 , 其关键 在于定位 , 即机 器人必须 知道 自己现 在 的位置和将要“ 行走 ” 的方 位。根据机器人 运用 的环境不
的干扰和误差的累积。控制 系统发 出路线 的整体行走方案 , 再 由各个闭环单元 检测是否按原定计划实施 , 当出现错误 和
坐标为( Y 。当一个 物体在 平 面内从 一点 移动 到另一 点 , ) 时, 只要 画出运动轨迹 , 就可 以计算 出在 该轨迹上 任一 点 的
1 系统 总体设 计
1 1 系统 的总体结构 .
《2024年基于ROS的小场景移动机器人设计与实现》范文
《基于ROS的小场景移动机器人设计与实现》篇一一、引言随着科技的进步,机器人技术得到了广泛的应用和深入的研究。
其中,移动机器人在各种场景中发挥着越来越重要的作用。
本文将介绍一种基于ROS(Robot Operating System)的小场景移动机器人的设计与实现。
该机器人适用于特定的小范围环境,如家庭、工厂内部等,能够完成自主导航、避障、物品搬运等任务。
二、系统概述本系统采用ROS作为机器人开发的框架,结合传感器、电机驱动等硬件设备,实现机器人的运动控制和环境感知。
系统主要由以下几个部分组成:移动平台、传感器模块、控制模块和ROS 软件架构。
三、硬件设计1. 移动平台:采用差速驱动的移动平台,由两个电机驱动,通过编码器获取运动信息。
2. 传感器模块:包括激光雷达、红外传感器、摄像头等,用于实现机器人的环境感知和避障功能。
3. 控制模块:采用微控制器作为核心,负责接收传感器数据,并根据ROS的指令控制电机的运动。
四、软件设计1. ROS软件架构:采用ROS作为软件架构,实现机器人的运动控制和环境感知。
ROS提供了丰富的工具和库,方便开发人员快速搭建机器人系统。
2. 导航与定位:通过激光雷达和编码器数据,实现机器人的导航与定位功能。
采用SLAM(同时定位与地图构建)算法,实现机器人在未知环境中的自主导航。
3. 避障功能:通过红外传感器和摄像头等传感器数据,实现机器人的避障功能。
当机器人检测到障碍物时,会根据障碍物的距离和类型,采取相应的避障策略。
4. 任务执行:通过ROS的节点通信机制,实现机器人的任务执行功能。
开发人员可以根据需求,编写相应的ROS节点,实现机器人的各种任务。
五、实现过程1. 硬件组装:将移动平台、传感器模块和控制模块进行组装,搭建出机器人的硬件平台。
2. 软件开发:在ROS环境下,编写机器人的软件代码。
包括导航与定位、避障功能、任务执行等功能的实现。
3. 测试与调试:对机器人进行测试与调试,确保机器人能够正常工作。
基于ROS的开源移动机器人系统设计
基于ROS的开源移动机器人系统设计ROS(Robot Operating System)是一个开源的机器人操作系统,广泛应用于各种移动机器人平台。
在设计基于ROS的开源移动机器人系统时,需要考虑机器人的硬件平台、软件架构、传感器集成、控制与导航等方面。
一、硬件平台设计硬件平台是移动机器人系统的基础,需要根据具体需求选择适合的硬件组件。
常见的硬件组件包括电机、传感器(如激光雷达、摄像头、惯性测量单元等)、嵌入式控制板等。
硬件平台的设计需要考虑机器人的尺寸、载重、功耗等特性,同时要与ROS兼容。
二、软件架构设计在基于ROS的移动机器人系统中,软件架构设计起着关键作用。
可以采用分层架构,类似于ROS自身的设计。
常见的软件架构包括感知层、规划层、执行层等。
感知层负责获取机器人周围环境的信息,规划层负责生成机器人的路径规划,执行层负责执行路径规划控制机器人运动。
此外,还可以设计上层的用户界面和运维管理模块。
三、传感器集成设计移动机器人系统通常需要使用多种传感器,如激光雷达、摄像头、惯性测量单元等。
传感器集成设计需要考虑硬件的连接和通信协议,以及软件的驱动和数据处理。
在ROS中,可以使用ROS官方提供的传感器驱动包,也可以自行开发传感器驱动。
四、控制与导航设计控制与导航是移动机器人系统的核心功能。
在ROS中,可以使用导航栈(Navigation Stack)实现机器人的路径规划和导航。
路径规划可以使用ROS导航栈中提供的全局路径规划器(Global Planner)和局部路径规划器(Local Planner)来完成。
导航栈还提供了定位功能,可以使用SLAM(Simultaneous Localization and Mapping)算法实现机器人的自主定位。
五、模块和功能的扩展基于ROS的开源移动机器人系统非常灵活,可以根据具体需求扩展功能和添加模块。
可以使用ROS的Package和Node机制,将整个系统划分为多个独立的功能模块,每个模块运行在一个独立的Node中,通过ROS的消息机制进行通信。
《移动机器人》课件-第6章 移动机器人定位

传感器动态性能还需提高,地图 存在累积误差
12
6.2 同时定位与建图
SLAM问题可以描述为: 移动机器人从一个未知的位置出发,在不断运动过程中根据自身位姿估计和传感 器对环境的感知构建增量式地图,同时利用该地图更新自己的定位。 定位与增量式建图融为一体,而不是独立的两个阶段。
13 移动机器人
6.2 同时定位与建图
移动机器人
三维正态分布曲线
6.3.2 NDT算法
6.3.2 NDT算法
移动机器人
6.3.2 NDT算法
移动机器人
6.3.2 NDT算法
相对于ICP需要剔除不合适的点对(点对距离过大、包含边界点的点对)的 缺点,NDT算法不需要消耗大量的代价计算最近邻搜索匹配点,并且概率密度函 数在两幅图像采集之间的时间可以离线计算出来;
Cartographer的核心内容是融合多传感器数据的局部子图创建以及闭环检测 中的扫描匹配。该方案的不足是没有对闭环检测结果进行验证,在几何对称的环 境中,容易引起错误的闭环。
移动机器人
6.3 基于激光雷达的定位方法
激光雷达点云数据是由一系列空间中的点组成的,属于稀疏点云。 点云处理的关键在于点云的配准,是通过点云构建完整场景的基础。 目前常用的配准方法有ICP算法和 NDT算法。 典型的基于激光雷达的定位方法主要有:Gmapping、Hector SLAM和
6.1 定位
(2)绝对定位 原理:确定移动机器人在全局参考框架下的位姿信息。 特点:不依赖于时间和初始位姿,没有累积误差问题,具有精度高、可靠性
强等特点。 采用导航信标、主动或被动标识、地图匹配、全球定位系统、超声波、激光、
卫星、WiFi、射频标签、蓝牙、超宽带、计算机视觉等定位方法,属于绝对定位 范围。
agv移动机器人原理与设计
agv移动机器人原理与设计AGV(Automated Guided Vehicle),即自动引导车,是一种智能型的移动机器人。
它基于红外线、激光和视觉等多种传感器技术,利用计算机控制系统,实现自主的导航和运输。
AGV移动机器人的运行原理主要包括三个主要的部分:导航、位置确定和运动控制。
1. 导航:AGV移动机器人通过激光或红外线等传感器根据设定的导航路径进行自主导航。
2. 位置确定:AGV移动机器人利用位置传感器、编码器和激光器等装置实时获取其位置信息。
3. 运动控制:AGV移动机器人的运动控制主要包括速度控制、方向控制和转向控制等。
AGV移动机器人的设计1. 硬件设计:AGV移动机器人的硬件设计包括机械结构、控制系统和传感器等。
a) 机械结构:机械结构设计决定了AGV移动机器人的形状和外观,同时也影响着机器人的负载能力和稳定性。
因此,机械结构设计需要考虑机器人的运输任务,以便更好地满足用户的需求。
b) 控制系统:控制系统是AGV移动机器人的核心部分,它主要由控制板和电机等组成。
在设计控制系统时需要考虑以下要素:控制方式、控制精度和刹车系统等。
c) 传感器:传感器在AGV移动机器人的自主导航和定位中扮演着重要角色。
常用的传感器有:红外传感器、激光传感器和编码器等。
a) 系统架构:系统架构包括软硬件的分层、模块化和接口定义等。
良好的系统架构有利于程序的设计、开发和维护。
b) 导航规划:导航规划是AGV移动机器人的基础,通过对机器人的移动任务的分析,确定最优的路径。
导航规划通过机器人的传感器信息获取、对环境的感知来选择适当的路径,以实现更高程度的自主导航。
c) 运动控制:运动控制主要是通过控制软件实现AGV移动机器人的速度、方向和转向等,同时控制机器人的动力、制动和倒车等功能,提高机器人的运动精度和稳定性。
通过编写特定的控制算法,避免机器人过度或轻微摆动。
总之,AGV移动机器人原理和设计均涉及到硬件和软件两个方面,其中,硬件方面包括机械结构、控制系统和传感器等组成部分,软件方面则包括系统架构、导航规划和运动控制等。
移动机器人自主导航系统及上位机软件设计与实现
计算机测量与控制.2022.30(1) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·141 ·收稿日期:20210601; 修回日期:20210720。
基金项目:国家自然科学基金项目(61973275);浙江省省属高校基本科研业务费(RF-A2020004)。
作者简介:崔 奇(1997),男,安徽亳州人,硕士生,主要从事移动机器人路径规划方向的研究。
引用格式:崔 奇,夏 浩,滕 游,等.移动机器人自主导航系统及上位机软件设计与实现[J].计算机测量与控制,2022,30(1):141146.文章编号:16714598(2022)01014106 DOI:10.16526/j.cnki.11-4762/tp.2022.01.022 中图分类号:TP311文献标识码:A移动机器人自主导航系统及上位机软件设计与实现崔 奇,夏 浩,滕 游,刘安东(浙江工业大学信息工程学院,杭州 310023)摘要:针对移动机器人自主导航系统,采用C++语言设计了一款基于Qt的跨平台实时数据可视化上位机软件;该软件执行SLAM技术和路径规划算法,实现可视化移动机器人建图与导航过程以及实时读取数据参数等功能;首先介绍移动机器人的硬件结构和功能;其次给出了自主导航所运用到的改进RRT 算法和动态窗口法;在详细叙述上位机软件工作流程的基础上,开发和设计了实时话题显示、读取以及界面可视化等功能;最后基于ROS系统完成移动机器人自主导航功能,并通过实时地图与数据可视化来验证所设计上位机软件功能的有效性。
关键词:移动机器人;自主导航;Qt;上位机;数据可视化犇犲狊犻犵狀犪狀犱犐犿狆犾犲犿犲狀狋犪狋犻狅狀狅犳犎狅狊狋犆狅犿狆狌狋犲狉犛狅犳狋狑犪狉犲犳狅狉犕狅犫犻犾犲犚狅犫狅狋犃狌狋狅狀狅犿狅狌狊犖犪狏犻犵犪狋犻狅狀犛狔狊狋犲犿狊CUIQi,XIAHao,TENGYou,LIUAndong(CollegeofInformationEngineering,ZhejiangUniversityofTechnology,Hangzhou 310023,China)犃犫狊狋狉犪犮狋:Inthispaper,across-platformreal-timedatavisualizationsoftwareisdesigned,whichbasedonQtforautonomousnavigationsystemsofmobilerobotbyusingC++language.ThesoftwareimplementsSLAMtech nologyandpathplanningalgorithmtorealizevisualizationofmappingnavigationprocessofmobilerobotandreal-timedataparameterreading.Firstly,weintroducethehardwarestructureandfunctionofmobilerobot.Secondly,givetheimprovedRRT algorithmanddynamicwindowmethodusedinautonomousnavigation.Basedonthede taileddescriptionoftheworkflowofthehostsoftware,thefunctionsofreal-timetopicdisplay,readingandinterfacevisualizationaredeveloped.Finally,themobilerobotautonomousnavigationfunctioniscompletedunderROSsystem,bythereal-timemapanddatavisualization,thefunctionvalidityofthedesignedhostsoftwareisverified.犓犲狔狑狅狉犱狊:mobilerobot;autonomousnavigation;Qt;hostsoftware;datavisualization0 引言移动机器人是一种在复杂环境下工作,具有自行感知、自行规划、自我决策功能的智能机器人。
室内移动机器人自主定位导航系统设计
室内移动机器人自主定位导航系统设计周旭龙,赵言正,杨玥旻(上海交通大学机械与动力工程学院,上海200240)摘要:提出一种基于机器人操作系统(ROS )的室内全方位移动机器人自主定位导航系统,以Nvidia Jetson TX2嵌入式计算机作为上层计算平台,通过激光雷达感知环境,并融合轮式里程计和单轴惯性测量单元,使用基于粒子滤波的自适应蒙特卡洛算法对机器人进行定位。
根据A*和紧绷带(TEB )算法规划最优路径,实现移动机器人自主导航和避障功能。
Stage 仿真及场地实验结果均表明,该系统不仅可自主精确定位机器人并构建高精度环境地图,还可规划最优路径并快速绕过动态障碍物。
关键词:移动机器人;同时定位与地图构建;室内定位与导航;激光雷达;机器人操作系统中图分类号:TP242文献标志码:A文章编号:1674-5590(2020)05-0055-05Design of autonomous localization and navigation system for indoor mobile robotZHOU Xulong,ZHAO Yanzheng,Y ANG Y uemin(School of Mechanical Engineering,Shanghai Jiao Tong University,Shanghai 200240,China )Abstract:An autonomous localization and navigation system is designed for omnidirectional indoor mobile robots,whichtakes Nvidia Jetson TX2as upper computing platform and senses surrounding environment by lidar.Integrating wheel odometer and single axis inertial measurement unit,the designed system locates the robot by using self-adaptive Monte -Carlo algorithm basing on particle wave filter and implements autonomous navigation and obstacles avoidance by A-star algorithm and TEB algorithm.Results of Stage simulation and field experimentboth show that the designed system can autonomously and accurately locate the robot,construct surrounding mapwith high accuracy,plan optimal path and help the robot avoid dynamic obstacles in time.Key words:mobile robot ;simultaneous localization and mapping;indoor localization and navigation;lidar;robot operatingsystem收稿日期:2020-01-14;修回日期:2020-03-07作者简介:周旭龙(1994—),男,山东潍坊人,硕士研究生,研究方向为移动机器人自主定位与导航.随着社会进步与发展,室内移动智能机器人成为目前机器人的热门研究方向[1]。
基于视觉SLAM的移动机器人导航与定位系统设计
基于视觉SLAM的移动机器人导航与定位系统设计移动机器人导航与定位是目前机器人研究领域的热点之一,可以广泛应用于自动驾驶、室内定位、无人机导航等领域。
视觉SLAM(Simultaneous Localization and Mapping)技术作为一种基于视觉感知的导航与定位方法,可以通过摄像机获取环境信息,同时实时地进行定位与地图构建,被广泛应用于移动机器人导航与定位系统的设计。
本文将详细介绍基于视觉SLAM的移动机器人导航与定位系统的设计。
首先,我们将介绍视觉SLAM的基本原理和技术,然后探讨移动机器人导航与定位系统的需求和设计要求,最后提出一种基于视觉SLAM的系统设计方案。
视觉SLAM是一种通过摄像机获取环境信息进行定位与地图构建的技术。
它通过对摄像机获取的图像序列进行特征提取和匹配,从而实现对相机位置和地图的估计。
常见的视觉SLAM算法包括ORB-SLAM、LSD-SLAM、DVO-SLAM等。
这些算法通常采用特征点、直接法或者半直接法进行地图构建和相机定位。
视觉SLAM的优点是可以在不依赖额外传感器的情况下,通过摄像机获取环境信息,实现高精度的导航与定位。
移动机器人导航与定位系统的设计需要考虑到环境感知、运动控制和路径规划等方面。
首先,机器人需要能够感知周围的环境,包括障碍物检测、地标识别等。
这样可以避免机器人碰撞到障碍物,同时利用地标信息进行定位。
其次,机器人需要能够进行准确的运动控制,包括速度控制、姿态调整等。
这样可以保证机器人在导航过程中的稳定性和精确性。
最后,机器人需要具备路径规划的能力,根据当前位置和目标位置确定最优路径,避免不必要的行走和转向。
基于视觉SLAM的移动机器人导航与定位系统设计需要解决以下几个关键问题。
首先是特征提取和匹配问题。
系统需要能够通过摄像机获取到清晰的图像,然后提取关键特征点,并将其与地图上的特征点进行匹配,以实现相机位置的估计。
其次是地图构建和更新问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移动机器人定位--传感器和技术摘要确切的了解车辆的位置是移动机器人应用的一个基本问题。
在寻找解决方案时,研究人员和工程师们已经开发出不同的移动机器人定位系统、传感器以及技术。
本文综述了移动机器人定位相关技术,总结了七种定位系统:1.里程法;2.惯性导航;3.磁罗盘;4.主动引导;5.全球定位系统;6.地标式导航和7.模型匹配。
讨论了各自的特点,并给出了现有技术的例子。
移动机器人导航技术正在蓬勃发展,正在开发更多的系统和概念。
因为这个原因,本文给出的各种例子只代表各自的种类,不表示作者的倾向。
在文献上可以发现许多巧妙的方法,只是限于篇幅,本文不能引用。
1。
介绍摘要概述了该技术在传感器、系统、方法和技术的目标,就是在一个移动机器人的工作环境中被找到。
在测量文献中讨论这个问题,很明显,不同方法的基准比较是困难的,因为缺乏公认的测试标准和规的比较。
使用的研究平台大不相同,用于不同的方法的关键假设也大不相同。
再进一步,困难源自事实上不同的系统是处在其发展的不同阶段。
例如,一个系统已经可以商业化;而另一个系统,也许有更好的性能,却只能实验室条件下作有限的测试。
正是由于这些原因,我们一般避免比较甚至判断不同系统或技术的表现。
在这篇文章里,我们也不考虑自动引导车(AGV)。
AGV使用磁带、地下的引导线、或地面上的彩色条纹在作引导。
这些小车不能自由设计路径,不能改变自己的道路,那样它们无法响应外部传感器输入(如避障)。
然而,感兴趣的读者可能会在[Everett, 1995]找到AGV引导技术调查。
也许最重要的移动机器人定位文献的阅读结果,正是到目前为止,并没有真正完美的解决问题的方案。
许多局部的解决办法大致分为两组:绝对的和相对的位置测量。
因为缺乏一种完善的方法,开发移动机器人通常结合两种方法,从每个小组选一个方法。
这些方法可以进一步分为以下七类:I:相对位置的测量(也称为Dead-reckoning)1。
里程法2。
惯性导航II:绝对位置测量(基于参考的系统)3。
磁罗盘4。
主动发射引导5。
全球定位系统6。
地标式导航7。
模型匹配2。
传感器和技术概述在这部分中,我们将概述应用于移动机器人定位的传感器和技术,也将给出适用的商用系统的实例或证据充分的研究结果。
2.1 距离测量法距离测量法是目前应用最广泛的移动机器人定位导航方法,它提供了很好的短期精度,很便宜,并允许非常高的采样率。
然而,它的基本的想法是在整个时间里累积增量运动信息,这样随着时间的推移,不可避免地导致无限积累误差。
具体地说,定位误差将导致严重的横向位置误差,伴随机器人的行程,按比例增加。
尽管有这些限制,大多数研究人员都认同距离测量是一个机器人的导航系统的重要的组成部分。
如果距离测量精度可以提高的话,导航的任务可以简化。
例如Cox [1991],Byrne 等[1992],Chenavier 和 Crowley[1992],提出距离测量数据和绝对位置测量融合方法,以获得更可靠的位置估计。
距离测量法是基于简单的等式(见[Borenstein 等, 1996a]),当驱动轮的转数可以变换成准确的相对于地面的直线位移时,它是精确的。
然而,如因车轮打滑以及其他一些更偶然的原因,轮子旋转可能不是成比例的转化为线性运动。
产生的误差可分为两类:系统误差和非系统误差[Borenstein 和 Feng, 1996]。
系统错误是那些源于机器人运动学的误差,例如轮子直径的偏差或相对于理想轮距的不确定性。
非系统误差是那些来自地板与车轮间的相互作用,例如车轮滑动或颠簸和裂缝。
通常,当一个移动机器人安装了里程/地标混合式的导航系统,环境中必须放置的地标的密度,从经验上已经决定了基于最坏情况下的系统误差。
一个或多个大型非系统误差发生时,这些系统都可能失败。
2.1.1 距离误差的测量在移动机器人中,一个重要但经常遇到的困难是距离误差的定量测量。
缺乏明确定量的距离误差测量规导致缺少移动平台的校准以及在科学交流上可比较的距离精度。
为了解决这个问题,Borenstein和Feng[1995]开发出一种方法,定量测量系统的距离误差,以及在一个有限的程度上的非系统误差。
这个方法,称为密歇根大学基准(UMBmark),它要求移动机器人预先编程自动跟踪4x4米的正方形和四个现场90度转弯。
这个过程是要在顺时针方向(cw)运动五次和逆时针方向(ccw)运动5次。
由距离法计算得到的机器人最后返回的位置与实际返回位置比较,将有一个类似如图1的图形。
图1的结果可以表达如下:--顺时钟组和反时钟组运行后的停止位置分布在两个完全不同的区域。
--顺时钟组或反时钟组部的分布是来自非系统误差。
但是,图1显示的是未标定车辆,运行在一个较为光滑的混凝土地面,在总测量误差中,系统误差显著大于非系统误差误。
--顺时钟组或反时钟组运行时不对称的重心的结果来自两类系统误差,统称为A类和B类[Borenstein and Feng, 1996]。
A类误差被定义为定位错误,它导致减少(或增加)转数,而不论是哪个方向正方形运动。
相比之下,B型误差导致减少(或增加)的转数,在两个方向上的作用是相反的。
一个典型的A型误差中轮距的作用是不确定的,而B型误差来源于轮子直径的不同。
实验进行UMBmark后一个数值,体现了odometric精度(相对系统误差)测试车辆可以发现[Borenstein峰,1996):UMBmark试验的基础上,Borenstein峰(1995、1996)开发了一种校准减少系统程序odometry微分传动车辆的错误。
在这个过程UMBmark测试在进行连续五次,公约的方向找到xc.g。
,连续波和xc.g.,公约。
从一组方程定义在[Borenstein峰,1995;两个校准常数]发现,这些图像可以包含在基本odometry计算的机器人。
应用该程序几个differential-drive平台是一个不断减少10到20倍的系统误差。
图2所示一个典型的校准结果的会议。
Emax,系统运行结果对于许多校准时段编织的LabMate机器人与平均Emax,系统= 330毫米无标定车辆和Emax,系统= 24 mm在校准。
2.1.2非系统测量误差Borenstein峰[1995]也提出了一种测量方法non-systematic错误。
这方法——UMBmark 扩展,可用于比较不同的机器人在相似的条件,虽然测量误差少non-systematic有用,因为这得视情况而定强烈的在地板上的特点。
然而,使用一套明确的不规则性和地板年近的平台错误可能Borenstein[1995]发展了一种方法非系统性检测和拒绝在移动机器人odometry错误。
这方法,两个合作平台不断非系统性相互纠正他们odometry(和一定的制度) 错误,即使是在两个平台上运动。
一个视频名为“瓣”展示这一系统的情况下运行包括在在文献[Borenstein等问题,1996 b])和[Borenstein 1995 v)。
一个商业版本的机器人,如图3,现在是可得到的[编织]“OmniMate名义下。
”,是因为它的部odometry误差修正,OmniMate 几乎完全麻木不仁的撞击,裂缝,或畸形放在地板上[Borenstein,1995)。
2.2 惯性导航惯性导航使用陀螺仪与加速度计分别测量旋转的速度和加速度。
测量值积分一次(或两次,对加速度计)得到位置。
惯性导航系统的优势是独立测量,也就是说不需要外部参考。
然而,惯性传感器数据是随时间漂移的,因为需要积分速率数据才能得到位置;任何一点小小的常数误差的增加,在积分后是不受约束的。
当超出扩展时间周期,惯性传感器大多不适合。
2.2.1 加速度计使用加速度计的测试结果对移动机器人的导航一般是不够的。
来自密歇根大学的研究信息发现,在较低的加速度(即在低的速度转变)下,信噪比很低。
加速度计有着广泛的漂移,它们也确实是对地面的不平坦敏感,这是因为来自任何高低不平的地面的干扰将引起重力加速度的一个分量被检测到。
一个低成本的惯性导航系统被用来克服包括以下倾斜传感器的问题[Barshan和Durrant-Whyte,1993;1995]。
倾斜传感器提供的倾斜信息提供给加速度计,以清除在加速度计的每个轴上表现出来的的重力成分。
尽管如此,从倾斜补偿系统得到的结果表明位置漂移率为1到8厘米/秒(0.4-3.1吋/秒),这取决于加速度变化的频率。
对大多数移动机器人的应用来说,这是一个无法接受的误差率。
2.2.2 陀螺仪陀螺仪(也称为“速度陀螺”或者是“陀螺”)对机器人定位是特别重要的,因为它们可以帮助补偿距离测量法最重要的弱点:在一个基于距离测量的定位方法里,任何小的瞬间的定位误差会导致一个持续增加的横向位置误差。
因为这个原因,如果定位误差能探测到并立即改正,它将是非常有益的。
对移动机器人的应用,直到最近,高度精确的陀螺还是太昂贵了。
例如,一个高质量的惯性导航系统(INS),如那些在一个商用飞机里安装的,将会有一个典型的工作中漂移大约是每小时1850米(1海里),价格由5万到7万美金(伯,1992)。
高端INS包用于地面在长距离行程中优于0.1%,但价格在10万美元到20万美金,而低性能的型号(即长距离时1%)在2万至5万美元之间[Dahlin 和Krantz,1988]。
然而,最近光纤陀螺(也被称为“激光陀螺”),具有众所周知的准确度,价格已大幅减少,已成为一个非常有吸引力的移动机器人导航解决方案。
一个商业上可用激光陀螺是安德鲁[ANDREW]公司的“Autogyro Navigator”,如图4。
这是一个单轴干涉型光纤陀螺(技术细节见[埃弗雷特,1995])。
它是基于偏振恒持光纤和精密光纤陀螺技术。
ANDREW最新型号Autogyro Navigator的技术规格见表1。
这种激光陀螺价格在1000美元以下,很适合作移动机器人导航。
2.3 磁罗盘在(x,y和θ)中,根据其影响相对定位累积误差情况,车辆航向是最有意义的导航参数。
因为这个原因,一个测量航向绝对值的传感器在解决自主平台导航需求中是极其重要的。
磁罗盘就是这样一个传感器。
任何磁罗盘都有的一个缺点,就是由于在电线或者钢结构附近的地球的磁场经常被扭曲 [Byrne et al.,1992]。
使得在室难以直接利用地磁传感器。
基于与地球磁场相关的效应的不同,可用的不同传感器有:机械磁罗盘;磁通门罗盘;霍尔罗盘;磁阻罗盘;磁弹罗盘。
最适合用于移动机器人应用的是磁通门罗盘。
只要保持一定的水平姿态,磁通门罗盘将测量地磁场的水平分量,伴随而来的决定性优势是低功耗、没有运动部件、容忍冲击和振动、快速启动以及相对较低的价格。
如果想要车辆在非平坦地形下操作,传感器线圈应该安装在平衡架上,避免机械损伤和由地磁场的垂直分量引入的严重的误差。