模糊控制的理论基础
模糊控制——理论基础(4模糊推理)

模糊控制——理论基础(4模糊推理)1、模糊语句将含有模糊概念的语法规则所构成的语句称为模糊语句。
根据其语义和构成的语法规则不同,可分为以下⼏种类型:(1)模糊陈述句:语句本⾝具有模糊性,⼜称为模糊命题。
如:“今天天⽓很热”。
(2)模糊判断句:是模糊逻辑中最基本的语句。
语句形式:“x是a”,记作(a),且a所表⽰的概念是模糊的。
如“张三是好学⽣”。
(3)模糊推理句:语句形式:若x是a,则x是b。
则为模糊推理语句。
如“今天是晴天,则今天暖和”。
2、模糊推理常⽤的有两种模糊条件推理语句:If A then B else C;If A AND B then C下⾯以第⼆种推理语句为例进⾏探讨,该语句可构成⼀个简单的模糊控制器,如图3-11所⽰。
其中A,B,C分别为论域U上的模糊集合,A为误差信号上的模糊⼦集,B为误差变化率上的模糊⼦集,C为控制器输出上的模糊⼦集。
常⽤的模糊推理⽅法有两种:Zadeh法和Mamdani法。
Mamdani推理法是模糊控制中普遍使⽤的⽅法,其本质是⼀种合成推理⽅法。
注意:求模糊关系时A×B扩展成列向量,由模糊关系求C1时,A1×B1扩展成⾏向量3、模糊关系⽅程①、模糊关系⽅程概念将模糊关系R看成⼀个模糊变换器。
当A为输⼊时,B为输出,如图3-12所⽰。
可分为两种情况讨论:(1)已知输⼊A和模糊关系R,求输出B,这是综合评判,即模糊变换问题。
(2)已知输⼊A和输出B,求模糊关系R,或已知模糊关系R和输出B,求输⼊A,这是模糊综合评判的逆问题,需要求解模糊关系⽅程。
②、模糊关系⽅程的解近似试探法是⽬前实际应⽤中较为常⽤的⽅法之⼀。
模糊控制理论基础知识

第二章 模糊控制理论基础知识2.1 模糊关系一、模糊关系R ~所谓关系R ,实际上是A 和B 两集合的直积A ×B 的一个子集。
现在把它扩展到模糊集合中来,定义如下:所谓A ,B 两集合的直积A ×B={(a,b)|a ∈A ,b ∈B} 中的一个模糊关系R ~,是指以A ×B 为论域的一个模糊子集,其序偶(a,b)的隶属度为),(~b a Rμ,可见R ~是二元模糊关系。
若论域为n 个集合的直积,则A 1×A 2×A 3×……A n 称为n 元模糊关系R ~,它的隶属函数是n 个变量的函数。
例如,要求列出集合X={1,5,7,9,20}“序偶”上的“前元比后元大得多”的关系R ~。
因为直积空间R=X ×X 中有20个“序偶”,序偶(20,1)中的前元比后元大得多,可以认为它的隶属度为1,同理认为序偶(9,5)的隶属于“大得多”的程度为0.3,于是我们可以确定“大得多”的关系R ~为R ~=0.5/(5,1)+ 0.7/(7,1)+ 0.8/(9,1)+ 1/(20,1)+ 0.1/(7,5)+0.3/(9,5)+ 0.95/(20,5)+ 0.1/(9,7)+0.9/(20,7)+ 0.85/(20,9)综上所述,只要给出直积空间A ×B 中的模糊集R ~的隶属函数),(~b a Rμ,集合A 到集合B 的模糊关系R ~也就确定了。
由于模糊关系,R ~实际上是一个模糊子集,因此它们的运算完全服从第一章所述的Fuzzy 子集的运算规则,这里不一一赘述了。
一个模糊关系R ~,若对∀x ∈X ,必有),(~x x R μ=1,即每个元素X 与自身隶属于模糊关系R ~的隶属度为1。
称这样的R ~为具有自返性的模糊关系。
一个模糊R ~,若对∀x ,y ∈X ,均有),(~y x Rμ=),(~x y Rμ 即(x,y)隶属于Fuzzy 关系R ~和(y,x)隶属于Fuzzy 关系R ~的隶属度相同,则称R ~为具有对称性的Fuzzy 关系。
第二章模糊控制理论基础
u U u U
经典集合论中任意一个元素与任意一个集合之间的 关系,只是“属于”或“不属于”两种,两者必居其一 而且只居其一。它描述的是有明确分界线的元素的组合。
用经典集合来处理模糊性概念时,就不行。
对于诸如“速度的快慢”、“年龄的大小”、 “温度的高低”等模糊概念没有明确的界限。
经典集合对事物只用"1"、"0"简单地表示“属于” 或“不属于”的分类;而模糊集合则用“隶属度 (Degree of membership)”来描述元素的隶属程度, 隶属度是0到1之间连续变化的值。
四种方法: 1、模糊统计法
基本思想:论域U上的一个确定的元素v0是否属于一个可变动的清 晰集合A*作出清晰的判断。
对于不同的实验者,清晰集合A*可以有不同的边界。但它们都对 应于同一个模糊集A。
模糊集A 年轻人
v0
清晰集A1* 清晰集A2*
论
17-30岁 20-35岁
域 U
所有人
计隶算属步度骤函:数在确每立次的统方计法中:,v0是固定的(如某一年龄), A*的值是可变的,作n次试验,则
示。
uU表示元素(个体)u在集合论域(全体) U内。
集合表示法(经典集合):
(1)列举法:将集合的元素全部列出的方法。 (2)定义法:用集合中元素的共性来描述集合的方法。
(3)归纳法:通过一个递推公式来描述一个集合的方法。 (4)特征函数表示法:利用经典集合论非此即彼的明晰性 来表示集合。因为某一集合中的元素要么属于这个集合, 要么就不属于这个集合。
定义2-8 设A,B F(U),则定义代数运算: (1)A与B的代数积记作A • B,运算规则由下式确定:
A • B(u)= A(u)B(u)
模糊控制的数学基础-1(2-16至2-30)模糊运算、分解定理
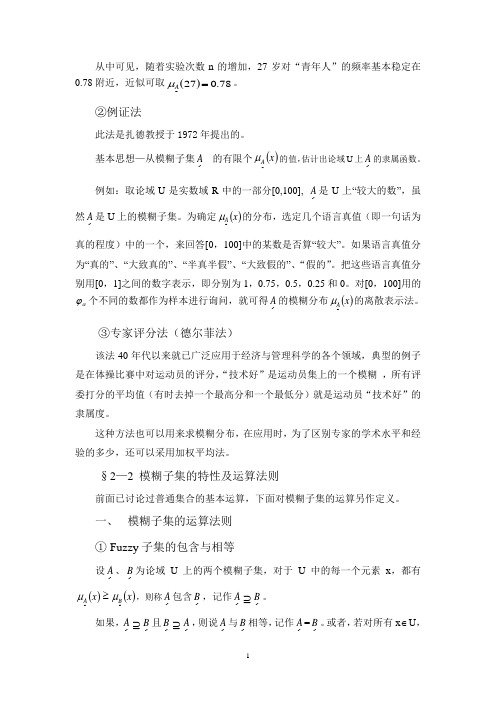
从中可见,随着实验次数n 的增加,27岁对“青年人”的频率基本稳定在0.78附近,近似可取()78.027~=A μ。
②例证法此法是扎德教授于1972年提出的。
基本思想—从模糊子集~A的有()x A ~μ的值,估计出论域U 上~A 的隶属函数。
例如:取论域U 是实数域R 中的一部分[0,100], ~A 是U 上―较大的数‖,虽然~A 是U 上的模糊子集。
为确定()x A ~μ的分布,选定几个语言真值(即一句话为真的程度)中的一个,来回答[0,100]中的某数是否算―较大‖。
如果语言真值分为―真的‖、―大致真的‖、―半真半假‖、―大致假的‖、“假的”。
把这些语言真值分别用[0,1]之间的数字表示,即分别为1,0.75,0.5,0.25和0。
对[0,100]用的αϕ个不同的数都作为样本进行询问,就可得~A 的模糊分布()x A ~μ的离散表示法。
③专家评分法(德尔菲法)该法40年代以来就已广泛应用于经济与管理科学的各个领域,典型的例子是在体操比赛中对运动员的评分,“技术好”是运动员集上的一个模糊 ,所有评委打分的平均值(有时去掉一个最高分和一个最低分)就是运动员“技术好”的隶属度。
这种方法也可以用来求模糊分布,在应用时,为了区别专家的学术水平和经验的多少,还可以采用加权平均法。
§2—2 模糊子集的特性及运算法则前面已讨论过普通集合的基本运算,下面对模糊子集的运算另作定义。
一、 模糊子集的运算法则 ① Fuzzy 子集的包含与相等设~A 、~B 为论域U 上的两个模糊子集,对于U 中的每一个元素x ,都有()x A ~μ≥()x B ~μ,则称~A 包含~B ,记作~A ⊇~B 。
如果,~A ⊇~B 且~B ⊇~A ,则说~A 与~B 相等,记作~A =~B 。
或者,若对所有x ∈U ,都有()x A ~μ=()x B ~μ,则~A =~B 。
②模糊子集的并、交、补运算设~A 、~B 为论域U 上的两个模糊子集,规定~A ~B 、~A ~B 、~A 的隶属函数分别为~~BAμ、~BAμ、~A μ,并且对于U 的每一个元素x 都有~~BAμ()∆x ()x A ~μ∨()x B ~μ=max[()x A ~μ,()x B ~μ] —~A ,~B 的并~~BAμ()∆x ()x A ~μ∧()x B ~μ=min[()x A ~μ,()x B ~μ]— ~A ,~B 的交~Aμ()∆x 1–()x A ~μ —~A 的补eg,设论域U={}4321,,,x x x x ,~A 、~B 是论域U 上的两个模糊集。
模糊控制理论与应用研究
模糊控制理论与应用研究随着科技的发展和人工智能的兴起,控制理论也得到了越来越广泛的应用。
其中,模糊控制理论作为一种新型的控制方法,被许多领域所采用,如机器人、汽车、电子设备等。
那么模糊控制理论是什么?它又有哪些应用呢?一、模糊控制理论的基本概念和原理模糊控制理论是在人工智能和控制理论的基础上发展起来的一种新型控制方法。
相较于传统的控制方法和系统,模糊控制更加灵活和适应性强。
其核心原理是模糊逻辑,即在给定的条件下,将模糊概念映射到具体的控制行为上。
模糊控制涉及到很多数学和计算机算法,比如模糊集合、模糊规则、模糊推理等,这些都是构成模糊控制系统的基础。
二、模糊控制理论的应用1.机器人控制机器人是模糊控制的一个典型应用领域。
机器人控制需要根据外部环境和任务需求来实现运动控制和路径规划等功能,而传统的控制方法很难涵盖这些功能。
因此,模糊控制可以实现对机器人的高自适应性控制,使其可以适应多种环境和不同的任务需求。
2.汽车控制在汽车控制领域,模糊控制也被广泛应用,其中最典型的应用是自动驾驶。
自动驾驶需要能够对行车环境进行识别和处理,并根据车辆的速度、方向、加速度等信息,实现自主控制。
3.电子设备控制除了机器人和汽车控制,模糊控制在电子设备控制领域也有广泛的应用。
电子设备控制中,需要对输入信号进行分析和处理,根据控制目标,制定相应的控制策略。
而模糊控制可以实现对信号的快速处理,从而减少控制误差和能耗。
总的来说,模糊控制理论和应用是一种可以帮助人们更好的解决控制问题的方法,不论是在机器人、汽车、电子设备等领域,模糊控制都可以帮助我们更好的实现自主控制和智能化控制,从而为我们的生产生活带来更多的便利和效益。
第3章 模糊控制理论的基础讲解
(3)模糊控制易于被人们接受。模糊控 制的核心是控制规则,模糊规则是用语言 来表示的,如“今天气温高,则今天天气 暖和”,易于被一般人所接受。 (4)构造容易。模糊控制规则易于软件 实现。 (5)鲁棒性和适应性好。通过专家经验 设计的模糊规则可以对复杂的对象进行有 效的控制。
第二节 模糊集合
一、模糊集合 模糊集合是模糊控制的数学基础。
c (x) Min A (x), B (x)
② 代数积算子
c (x) A (x) B (x)
③ 有界积算子
c (x) Max0, A (x) B (x) 1
(2)并运算算子 设C=A∪B,有三种模糊算子: ① 模糊并算子
c (x) Max A (x), B (x)
c (x) A (x) B ( x) 1 1 (1 A (x)) (1 B (x))
γ取值为[0,1]。
当γ=0时, c (x) A (x) ,B相(x当) 于A∩B
时的算子。
当γ=1时,c (x) A(x) B (x) A(,x)相.B (x)
(3)等集
两个模糊集A和B,若对所有元素u,
它们的隶属函数相等,则A和B也相等。
即
A B A (u) B (u)
(4)补集 若 A 为A的补集,则
A A (u) 1 A (u)
例如,设A为“成绩好”的模糊集, 某学生 u0 属于“成绩好”的隶属度为:
A (u0 ) 0.8 则u0 属于“成绩差”的隶属度
第三章 模糊控制的理论基础
第一节 概 述 一、 模糊控制的提出
以往的各种传统控制方法均是建立在 被控对象精确数学模型基础上的,然而, 随着系统复杂程度的提高,将难以建立 系统的精确数学模型。
模糊控制及其应用
作为一个控制系统,对那些难以预测、难以 量化、难以用数学模型描述、难以识别、难 以界定、随机性很大的动态特性常变的控制 系统,用经典的控制方法已经不能满足要求, 故出现了模糊控制。
模糊控制的定义:
模糊控制是以模糊数学作为理论基础,以人 的控制经验作为控制的知识模型,以模糊集 合、模糊语言变量以及模糊逻辑推理作为控 制算法的一种控制。
i 1
n
均方根误差, (xi x)2 / n ;n 工件总数。
i 1
式中参数的大小直接影响隶属曲线的形状,而隶属函数曲线的形状
不同会导致不同的控制特性,如图5所示的三个模糊子集A、B、C 的隶属函数曲线的形状不同,显然模糊子集A形状尖些,它的分辨 率高,其次是B,最低是C。
μ(x)
μA(x)
③建立模糊控制器的控制规则
模糊控制器的控制规则是基于手动控制策略,而手动控 制策略又是人们通过学习、试验以及长期经验积累而逐渐形 成的,存贮在操作者头脑中的一种技术知识集合。手动控制 过程一般是通过对被控制对象(过程)的一些观测,操作者 再根据已有的经验和技术知识,进行综合分析并作出控制决 策,并经调整对被控对象进行控制,从而使系统达到预期的 目标。手动控制策略一般都可以用条件语句加以描述,常见 的模糊条件语句及其对应的模糊关系R概括如下:
1.模糊变量的描述
模糊变量的描述是通过语言的描述实现的, 而语言变量有以下五个要素:
(1)语言变量及其名称 语言变量是模糊控制系统控制量即模糊控制量的语言 描述。语言变量的名称如误差、进给量、表面粗糙度、 温度等一些需要控制的量。
(2)语言变量的语言值 是对语言变量的大小、高低等不同等级的语言描述。 如作为语言变量误差的语言值大小的描述为很大、大、 中、小、零等。
智能控制模糊控制PPT课件
机械结构力学及控制国家2.1.1 模糊控制的发展概述 模糊控制的发展——第三阶段
上世纪80年代,模糊理论的应用在深度和广度上 都有了较大进展,产生了大量的应用成果。
识别
输入的烹饪功能命令,口感命令
都是模糊的概念,带有人类思维
执行级
的命令。
对象
智能控制系统分层递阶结构示意图
机械结构力学及控制国家重点实验室
8
2.1 引言
2.1.1 模糊控制的发展概述 举个小例子
如何从人群中识别出自己认识的人?
计算机怎么识别?
脸部特征(脸型,眼睛,鼻子等) 身材(高、矮,胖、瘦) 声音 年龄 走路特征
如今需求:要考虑视觉、听觉、触觉信号,包含了图形、 文字、语言、声音等信息
输入参数越来越直接,越来越智能。
机械结构力学及控制国家重点实验室
4
2.1 引言
2.1.1 模糊控制的发展概述 一个小问题
随着社会文明的进步,社会分工越来越明确。于是对 于大部分人来说,做饭能力。。。
排骨怎么烧?
机械结构力学及控制国家重点实验室
特别是在日本,模糊控制被成功地应用于废水处 理、机器人、汽车驾驶、家用电器和地铁系统等 许多领域,掀起了模糊技术应用的浪潮。模糊软 硬件也投入商业使用。
机械结构力学及控制国家重点实验室
13
2.1 引言
2.1.1 模糊控制的发展概述 模糊控制的发展——第四阶段
上世纪90年代以来,模糊理论的研究取得了一系列突 破性的进展,例如自适应模糊控制,模糊系统的结构 和稳定性分析,模糊优化,模糊逼近等。
人工智能控制技术课件:模糊控制
模糊集合
模糊控制是以模糊集合论作为数学基础。经典集合一般指具有某种属性的、确定的、
彼此间可以区别的事物的全体。事物的含义是广泛的,可以是具体元素也可以是抽象
概念。在经典集合论中,一个事物要么属于该集合,要么不属于该集合,两者必居其一,
没有模棱两可的情况。这表明经典集合论所表达概念的内涵和外延都必须是明确的。
1000
1000
9992
9820
的隶属度 1 =
= 1,其余为: 2 =
= 0.9992, 3 =
=
1000
1000
1000
9980
9910
0.982, 4 =
= 0.998, 5 =
= 0.991,整体模糊集可表示为:
1000
1000
1
0.9992
0.982
0.998
《人工智能控制技术》
模糊控制
模糊空基本原理
模糊控制是建立在模糊数学的基础上,模糊数学是研究和处理模糊性现
象的一种数学理论和方法。在生产实践、科学实验以及日常生活中,人
们经常会遇到模糊概念(或现象)。例如,大与小、轻与重、快与慢、动与
静、深与浅、美与丑等都包含着一定的模糊概念。随着科学技术的发展,
度是2 ,依此类推,式中“+”不是常规意义的加号,在模糊集中
一般表示“与”的关系。连续模糊集合的表达式为:A =
)( /其中“” 和“/”符号也不是一般意义的数学符号,
在模糊集中表示“构成”和“隶属”。
模糊集合
假设论域U = {管段1,管段2,管段3,管段4,管段5},传感器采
1+|
模糊控制的理论基础
有关隶属函数的MATLAB设计,见著作:
楼顺天,胡昌华,张伟,基于MATLAB的系统分析 与设计-模糊系统,西安:西安电子科技大学出版 社,2001
例2.5 隶属函数的设计:针对上述描述的6种隶属 函数进行设计。M为隶属函数的类型,其中M=1 为高斯型隶属函数,M=2为广义钟形隶属函数, M=3 为 S 形 隶 属 函 数 , M=4 为 梯 形 隶 属 函 数 , M=5为三角形隶属函数,M=6为Z形隶属函数。 如图所示。
X Years
图2-1 “年轻”的隶属函数曲线
2.2.2 模糊集合的运算 1 模糊集合的基本运算
由于模糊集是用隶书函数来表征的,因此两 个子集之间的运算实际上就是逐点对隶属度作 相应的运算。
(1)空集 模糊集合的空集为普通集,它的隶属度为0,
即
A A (u) 0
(2)全集 模糊集合的全集为普通集,它的隶属度为1,
设A和B经过平衡运算得到C,则
c (x) A (x) B ( x) 1 1 (1 A (x)) (1 B (x))
其中γ取值为[0,1]。 当γ=0时,c (x) A (x) B (x),相当于A∩B时的算子。
当γ=1,c (x) A(x) B (x) A(x) B (x) ,相当于
B 0.3 0.1 0.4 0.6 u1 u2 u3 u4
求A∪B,A∩B
则 A B 0.9 0.2 0.8 0.6
u1 u2 u3 u4
A B 0.3 0.1 0.4 0.5 u1 u2 u3 u4
例2.4 试证普通集合中的互补律在模糊集
合中不成立,即 A (u) A (u) 1,
则 u0属于“成绩差”的隶属度为:
A (u0 ) 1 0.8 0.2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例2.[程控机床]:自动进刀切削,加工出预期的几何形 状直线、圆弧等各种差补控制,进给量控制,等等。
编辑ppt
3
模糊控制(1/10)
模糊控制与传统控制的差异: 传统控制的设计,以数学模型来描述受
控系统。 模糊控制的设计,只需对系统的操作法
则定义区分清楚即可,经过反复的误差 修正就可以达到控制结果。
– Simulink是一种工程人员适用的高级仿真
工具软件。p177
编辑ppt
11
Simulink仿真环境
File》new》model新建模型
File》open》打开.mdl文件,打开一个模型。
Simulink打开simulink库,库中有各种仿真可 用的元件。包含许多子库(continuous、 discrete、function&table、math、nonlinear、 signal&system、sinks、sources。。。)
编辑ppt
8
anfisedit fuzzy mfedit ruleedit ruleview surfview
GUI工具
打开ANFIS编辑器的GUI(图形用户界 面) 调用基本的FIS编辑器
隶属度函数编辑器
规则编辑器和解析器
规则观察器和模糊推理方框图
输出曲面观察器
编辑ppt
9
模糊控制系统实例p191
编辑ppt
1
水塔水位控制 p173 1、if(level is okay) then valve is no_change)1 2、if( level is low)then ( valve is open_fast) 3、if( level is high)then ( valve is close_fast) 4、if( level is okay)and (rate is positive) then ( valve is open_slow) 5、if( level is okay)and (rate is negative) then ( valve is open_fast)
多条规则 合成:
Ri : if x Ai andy Bi thenz zi
n
Ai(x)Bi(y)zi
z
i1 n
i1 Ai(x编辑)pptBi(y)
7
MATLAB及其应用
Matlab自身的优越性使其推出后得到各个领域专 家学者的广泛关注,各个领域的专家学者相继推出 了Matlab工具箱,其中主要有信号处理、控制系统、 神经网络、模糊控制、最优系统、系统辨识、通信、 图形图像处理、小波分析和样条等工具箱,而且工 具箱还在不断增加和完善,这些工具箱给各个领域 的工程研究和应用提供了有力的工具。并且,随着 计算机软硬件的更新及升级,Matlab这套软件的功 能也变得越来越强大与实用,尤其是Simulink工具平 台的出现,使得各个系统的设计和仿真变得相当容 易和直观。
Cart and Pole (slcp)
小车上的单摆
Cart and two Poles (slcpp1) 小车上的双摆
Backing Truck (sltbu)
卡车倒车
Shower Model (shower) 淋浴温控模型
编辑ppt
10
Matlab在仿真中的应用
Simulink快速入门
– Simulink是一种利用matlab开发的系统仿 真软件工具。用来提供系统级的建模和 仿真工作平台。它可以建模和仿真线形 系统、非线性系统、连续(模拟)系统、离 散系统和各类系统的混合系统。可以用 动画来观察仿真过程。
编辑pptni型模糊器:用max min运算做推理的运算的模糊 推理器。 2、larsen型模糊推理器:用乘积算法做模糊蕴含规则的模糊 推理器。 3、Sugeno型模糊推理器:(0阶和1阶)
ix fAan y d Bthz ekn 阶 (0)
ix fAan y d Bthz epn *xq*yr阶 (
编辑ppt
2
控制的定义
控制的本意 :为了达到某种目的对事物进行支配、 管束、管制、管理、监督、镇压。
例1.[钢铁轧制]:轧出厚度一致的高精度铁板
温度控制,生铁成分控制,厚度控制,张力控制,等等。
自动控制 :
在没有人直接参与的情况下,利用外加的设备或装置 (称 控制装置或控制器), 使机器、设备或生产过程 (被控对象)的某个工作状态或参数(即 被控量 )自动 地按照预定的规律运行。
Matlab能用仿真解决的问题,基本上取决于 simulink库。
与模糊控制有关的元件库是fuzzy logic toolbox。
编辑ppt
12
应用举例
建立一个最简单的系统
x sitn)(
x(0)1;解x 2-co(st)
单质量弹簧系统
Mx kxcx
x(0)10,0x(0) 0
M
Missile Guidance System dblcart1(双质量-弹簧系统)
Ball Juggler (slbb)
魔法小球
Inverse kinematics (invkine) 机器人手臂的往复运动
Defuzzification Methods 去模糊化方法
MF gallery
各种模糊函数
Water Tank (sltank)
水箱控制
Water Tank with Rule Viewer 带观测器的水箱控制
Matlab处理模糊运算的过程: 1、根据用户设定的and和or和每一条推 理规则,计算本条规则得到的模糊概念。 2、将每一条规则计算出来的模糊概念, 根据also的设定来综合成一条模糊概念。 3、去模糊化,把模糊的概念转化为确 定的输出。 实际上,模糊控制器根据输入(MI) 及内部的规则计算出输出。
编辑ppt
13
水箱
h
are*a h 2*g*h*outar
flowin
编辑ppt
14
建立一个复杂的系统
生长在罐中的微生物模型。
编辑ppt
4
模糊控制(2/10)
1. 模糊控制系統
我们关注的控制系统一般指的是反馈控制系统, 利用误差(e)和误差的变化率来控制系统。
编辑ppt
5
模糊控制(3/10)
2.模糊控制器架构
误差 模糊化
模糊化 誤差
模糊化 控制信号
明确 控制信号
模糊推理 (控制规则)
反模糊化
误差变化量
模糊化 误差变化量