第17章机器人辅助康复治疗
第十七章 康复机器人辅助治疗
从大脑获取与外界通信信息的全新人机接口方式 直接连接大脑和外部环境 通过主动意图识别、帮助病人进行主动康复训练 设定的不同模式进行康复训练 利用虚拟现实技术进行视觉反馈
第三节 下肢康复机器人辅助训练
第三节 下肢康复机器人辅助训练
一、概述
1.定义 2.发展现状 3.分类
第二节 上肢康复机器人辅助训练
2.训练方法
运动模式 分期训练 关节组合模式
第二节 上肢康复机器人辅助训练
运动模式
被动运动 助动运动 主动运动
•自由运动 •抗阻运动 •扰力运动
第二节 上肢康复机器人辅助训练
分期训练
康复治疗需针对病人的具体情况制订训练方案 不同时期需要采用不同的康复方法进行渐进式治疗 急性期,重点是预防关节挛缩及提供适宜感觉刺激 亚急性期,诱导关节的分离运动和抑制异常的运动模式 慢性期,机器人辅助的任务特异性主动运动
第一节 概述
第一节 概述
一、康复机器人的概念
1. 定义 2. 分类 3. 康复机器人的优势 4. 发展趋势 5. 医学理论依据
第一节 概述
1.定义
医疗机器人的一个重要分支 利用智能化、自动化技术和器械辅助病人进行康复治
疗、护理和日常生活的高科技产品 涉及到康复医学、生物力学、机械学、机械力学、电
第二节 上肢康复机器人辅助训练
2.发展历程
MIT-MANUS训练系统 MIME(mirro-image motion enabler, MIME) 手-物体-手系统(hand-object-hand system) ARM-Guide(assisted rehabilitation and
第二节 上肢康复机器人辅助训练
康复医学中的康复技术的新进展
康复医学中的康复技术的新进展近年来,康复医学领域的技术不断取得新的进展,为康复治疗的效果提供了更多的可能性。
本文将介绍康复医学中的一些新兴技术,包括机器人辅助康复、虚拟现实技术和神经反馈系统等,以及它们在康复治疗中的应用。
一、机器人辅助康复技术机器人辅助康复技术是近年来康复医学领域中的重要研究方向之一。
利用机器人设备能够实现康复治疗的个性化、精准化和定量化,提高患者的康复效果。
例如,下肢康复机器人可以帮助脊髓损伤患者进行步态训练,通过精确的运动控制和力量支撑,促进患者的运动恢复。
二、虚拟现实技术虚拟现实技术是另一个在康复医学中迅速发展的领域。
通过利用计算机生成的视觉、听觉和触觉等感官刺激,虚拟现实技术能够为患者创造出生动逼真的虚拟环境,提供与现实世界相似或完全不同的体验。
在康复治疗中,虚拟现实技术可以被应用于平衡和协调训练、动作控制和认知功能的恢复等方面,提供更具吸引力和互动性的治疗方式。
三、神经反馈系统神经反馈系统是一种通过测量和分析神经信号,帮助患者调整和控制自身生理和身体状态的技术。
通过具体的信号反馈,患者可以实时了解自身的身体状态,从而更好地掌握康复训练的进程和效果。
神经反馈系统被广泛应用于神经康复和运动控制的研究中,有助于提高患者的主动性和参与度。
四、其他康复技术的新进展除了上述提到的技术,康复医学领域还涌现出诸如电磁刺激、脑机接口和基因治疗等新兴技术。
电磁刺激技术通过对神经组织进行刺激,促进神经再生和功能恢复;脑机接口技术以大脑电活动作为输入信号,实现对外部设备的控制和交互;基因治疗技术通过改变基因表达,促进神经细胞的修复和再生。
这些技术的不断突破为康复治疗提供了新的方向和希望。
总结:康复医学中的康复技术不断取得新的进展,从机器人辅助康复到虚拟现实技术,再到神经反馈系统和其他新兴技术,它们都为康复治疗带来了新的突破和可能性。
这些技术的应用不仅提高了康复治疗的效果,还提供了更加个性化和精准化的治疗方式。
医疗机器人在康复治疗中的作用与效果
医疗机器人在康复治疗中的作用与效果在现代医学的发展过程中,医疗机器人已经逐渐成为一种不可或缺的技术。
特别是在康复治疗领域,医疗机器人的应用不仅提高了康复治疗的效果,还大大提升了康复患者的生活质量。
一、机器人辅助康复治疗的种类在康复治疗中使用的医疗机器人有多种类型,其中最常见的是运动康复机器人。
运动康复机器人可以通过模拟运动的方式,帮助康复患者进行肌肉力量的恢复和运动功能的训练。
此外,还有神经康复机器人,它能够通过精确的刺激,促进神经再生和康复效果的提升。
还有一些智能康复机器人,它们能通过人工智能技术和大数据分析,实现个性化康复方案和实时监测。
二、医疗机器人在康复治疗中的作用首先,医疗机器人能够提供一种无需过多人力投入的康复治疗方式。
在康复治疗中,患者需要进行反复的训练和练习,耗费大量的人力和物力。
而医疗机器人可以通过自动化的方式,为康复患者提供长时间连续的康复训练,大大减轻了医护人员的负担。
其次,医疗机器人能够提供更加精确和个性化的治疗方案。
每个康复患者的病情和治疗需求都不尽相同,传统的人工治疗往往难以满足个体化的要求。
而医疗机器人可以通过预设程序和实时监测,根据患者的情况调整治疗方案,使得康复治疗更加精确和个性化。
另外,医疗机器人还能够提供一种安全的治疗环境。
在康复治疗中,一些患者需要进行复杂的运动和操作,如果没有足够的安全保障,很容易导致二次伤害的发生。
而医疗机器人可以通过精确的控制和监测,为康复患者提供安全可靠的治疗环境,降低了二次伤害的风险。
三、医疗机器人在康复治疗中的效果医疗机器人在康复治疗中的应用已经取得了显著的成效。
研究表明,使用医疗机器人进行运动康复治疗可以显著提高康复患者的肌肉力量和运动功能。
而神经康复机器人在提高神经再生和功能恢复方面也表现出了良好的效果。
此外,智能康复机器人通过个性化的治疗方案和实时监测,可以帮助康复患者更好地掌握康复进展,提高治疗效果。
不仅如此,医疗机器人还为康复患者带来了更多的福利。
医疗机器人的康复辅助技术
医疗机器人的康复辅助技术随着科技的不断进步,医疗机器人已经逐渐成为现实,为医疗行业带来了巨大的变革。
其中之一就是医疗机器人的康复辅助技术,它在康复治疗领域发挥着重要作用。
本文将介绍医疗机器人的康复辅助技术及其优势,以及它在康复治疗中的具体应用。
一、医疗机器人的康复辅助技术概述医疗机器人的康复辅助技术是指利用机器人技术来辅助进行康复治疗的一种方法。
通过利用机器人的高精度和灵活性,患者可以进行更加精准和个性化的康复训练。
医疗机器人的康复辅助技术主要包括以下几个方面:1. 运动康复机器人:这种机器人可以帮助患者进行运动康复训练,如肌肉力量训练、关节活动训练等。
它们可以根据患者的具体情况调整训练难度和强度,提供个性化的康复方案。
2. 步态康复机器人:步态康复机器人可以帮助患者恢复行走能力。
通过模拟人体的步态运动,它们可以协助患者进行步态训练,提高患者的平衡和协调能力。
3. 假肢康复机器人:对于需要使用假肢的患者来说,假肢康复机器人可以提供更加精准和自然的运动控制。
它们通过感知患者的神经信号来控制假肢的运动,使患者能够更加自如地进行日常活动。
二、医疗机器人的康复辅助技术的优势医疗机器人的康复辅助技术相比传统的康复治疗方法具有以下几个优势:1. 精准性:机器人可以提供更加精准和准确的力量和运动控制,从而实现更加精细的康复治疗。
患者可以根据自身情况进行个性化的治疗,提高治疗效果。
2. 重复性:机器人可以进行长时间的重复训练,提供更大的治疗剂量。
这对于一些需要进行大量重复训练的疾病来说尤为重要,如中风后的康复训练。
3. 安全性:机器人可以提供更加安全的治疗环境。
它们具有高度的稳定性和安全保护机制,能够避免患者在康复训练中受到伤害。
三、医疗机器人的康复辅助技术的应用医疗机器人的康复辅助技术在康复治疗中有着广泛的应用。
以下是几个典型的应用场景:1. 中风康复:机器人可以帮助中风患者进行肌肉力量训练和步态康复训练,促进中风患者的康复恢复。
机器人辅助康复治疗与训练系统设计

机器人辅助康复治疗与训练系统设计近年来,康复治疗与训练在医学领域中得到了广泛应用。
为了提高治疗效果和提供更好的康复训练资源,研发一套机器人辅助康复治疗与训练系统成为了大家关注的焦点。
本文将从系统设计的角度探讨该系统的目标、功能、设计原则,并介绍其中涉及的核心技术和关键组件。
1. 系统目标机器人辅助康复治疗与训练系统的目标是帮助康复患者恢复和改善受损的身体功能,提高生活质量。
系统应该能够为患者提供个性化、全面的康复治疗和训练方案,并通过记录和分析数据来评估治疗进展。
2. 功能需求(1)运动辅助功能:系统应该能够通过机器人运动装置辅助患者进行康复运动,提供适当的力量支持和运动轨迹控制。
同时,系统还应该能够记录患者运动数据,以便后续的分析和评估。
(2)交互界面:系统应该提供友好的交互界面,使患者能够轻松使用。
交互界面应该包括简洁明了的操作指南和反馈信息。
(3)个性化康复方案:系统应该根据患者的特定康复需求和身体状况,为其制定个性化的康复治疗和训练计划。
该计划应该包括具体的运动目标、频率、持续时间和难度等信息,并能根据患者的进展进行调整。
(4)进展评估与反馈:系统应该能够通过数据分析和算法,对患者的运动进展进行评估,并提供及时的反馈。
评估结果应该能够量化患者的康复程度,并据此调整康复方案。
3. 设计原则(1)安全性:系统设计应该注重患者的安全。
机器人运动装置需要具备安全保护措施,避免对患者造成伤害。
此外,交互界面和操作流程也应该简单明了,避免患者因误操作而导致意外伤害。
(2)可定制性:系统应该具备一定的可定制性,以适应不同患者的康复需求。
康复方案应该根据患者的病情、病史和身体状况进行个性化调整,并能根据患者的康复进展进行动态调整。
(3)数据存储与分析:系统应该能够记录和存储患者的运动数据,并结合数据分析算法,对患者的康复进展进行评估。
这样可以根据评估结果调整康复方案,提高治疗效果。
4. 核心技术和关键组件(1)机器人运动装置:机器人运动装置是系统的核心组件之一,它可以为患者提供力量支持和运动轨迹控制。
机器人技术在康复训练中的应用
机器人技术在康复训练中的应用机器人技术的迅猛发展,为康复训练带来了前所未有的机遇。
作为一种辅助治疗手段,机器人在康复领域的应用已经取得了显著的成果。
通过使用机器人进行康复训练,患者能够得到更精确、个性化的治疗,并且可以提高治疗效果和康复速度。
本文将探讨机器人技术在康复训练中的应用,并分析其优势和挑战。
首先,机器人技术在康复训练中的应用可以为患者提供精确和个性化的治疗。
传统的康复训练通常依赖于医师或康复师的经验和技术水平,受其个人能力和时间限制,很难实现个性化治疗。
而机器人技术可以根据患者的具体情况制定个性化的治疗方案,并根据实时数据进行调整,确保治疗的精确性和有效性。
例如,机器人手臂可以通过感应技术精确控制运动轨迹,帮助患者进行手部康复训练。
这种个性化的治疗方案可以更好地满足患者的需求,提高治疗效果。
其次,机器人技术在康复训练中的应用可以提高治疗效果和康复速度。
机器人可以根据患者的进展和反馈进行实时调整,确保治疗的准确性和效果。
与传统的人工治疗相比,机器人可以提供更稳定、持久的力量和运动控制,减少了人为错误的可能性。
此外,机器人还可以记录和分析患者的康复数据,为医师提供有价值的依据和参考,优化治疗方案。
通过机器人技术的辅助,患者可以实现更高强度的康复训练,加快康复进程。
然而,机器人技术在康复训练中也面临一些挑战。
首先,机器人技术的成本较高,对医疗机构和患者来说可能是一个不小的负担。
目前,机器人设备的价格较高,相对较少的医疗机构能够承担这种高昂的投资费用。
此外,机器人技术的运营和维护成本也不容忽视。
这些问题需要得到解决,以促进机器人技术在康复训练中的广泛应用。
第二,机器人技术在康复训练中的安全性和可靠性也是一个重要问题。
机器人技术的运动控制和力量输出需要精确控制,否则可能对患者造成意外伤害。
因此,机器人的设计和开发需要符合严格的安全标准,并采用多重安全措施,例如紧急停机按钮和重力传感器等,以确保患者在训练过程中的安全。
机器人在医疗康复中的作用
机器人在医疗康复中的作用近年来,随着科技的不断进步和应用,机器人在医疗康复中的作用逐渐受到重视和广泛应用。
机器人作为一种先进的技术手段,不仅可以提供有效的康复训练,还能与医护人员合作,为患者提供精准的康复治疗。
本文将探讨机器人在医疗康复中的具体作用和意义。
一、机器人在康复治疗中的应用机器人在医疗康复中的应用涉及多个方面,例如运动功能康复、言语功能康复、认知功能康复等。
在运动功能康复方面,机器人可以通过运动训练等方式,帮助患者恢复丧失的运动功能。
机器人的高精度和强大的计算能力,能够准确记录患者的运动数据,并根据个体情况进行个性化的康复计划制定。
在言语功能康复中,机器人可以通过语音交互和语音模拟等方式,帮助患者进行言语训练,提高口腔肌肉的灵活性和语言表达能力。
在认知功能康复中,机器人可以通过计算能力和人工智能技术,为患者提供认知训练和辅助记忆功能,帮助患者提高认知能力和生活自理能力。
二、机器人在医疗康复中的优势相比传统康复方法,机器人在医疗康复中具有很多优势。
首先,机器人可以提供精准、一对一的康复治疗。
传统康复需要护士或医生亲自进行指导,但由于人力资源有限,很难实现个体化、精准化的康复训练。
而机器人具有高度可编程性和个性化设置功能,能够根据患者的具体情况进行康复训练,提供更好的治疗效果。
此外,机器人还能够持续记录患者的康复数据和进展情况,为医护人员提供更多参考和决策依据。
另外,机器人在康复训练中减轻医护人员的负担,提高康复效率。
康复训练通常需要医护人员全程陪同并进行康复指导,但是医护人员数量有限,往往难以满足患者的需求。
机器人可以承担一部分康复训练的工作,减轻医护人员负担,提高康复效率。
此外,机器人的高效率和长时间工作能力,使其可以为患者提供更充分的康复训练和服务。
三、机器人在医疗康复中的发展前景目前,机器人在医疗康复中的应用还处于初级阶段,但随着科技的进一步发展和应用,机器人在医疗康复领域的发展前景非常广阔。
人工智能辅助康复治疗提高康复效果与运动康复
人工智能辅助康复治疗提高康复效果与运动康复随着科技的不断进步与发展,人工智能逐渐应用于康复治疗领域,为康复患者提供更好的治疗效果与运动康复。
本文将从人工智能辅助康复治疗的优势、应用场景和实际案例等方面进行探讨,旨在明确人工智能在康复治疗中的作用与意义。
一、人工智能辅助康复治疗的优势人工智能技术的不断发展,为康复治疗带来了许多优势。
首先,人工智能可以根据康复患者的病情以及个体差异,实现个性化的康复方案制定。
通过分析康复患者的身体状况和康复需求,人工智能可以生成量身定制的康复计划,从而提高康复的效果和效率。
其次,人工智能可以辅助康复治疗的过程中进行实时监测和反馈。
传统的康复治疗中,往往需要康复师长时间地观察和分析患者的运动状态,而人工智能可以通过传感器和摄像头等设备,实时采集和分析患者的运动数据,帮助康复师及时发现问题并进行有效干预。
最后,人工智能可以提供丰富的辅助康复治疗工具和设备。
例如,虚拟现实技术可以为康复治疗提供更加真实的环境体验,增强患者的主动参与和治疗效果。
机器人辅助康复治疗设备可以模拟人工师的动作指导和患者之间的互动,提高治疗的可行性和效果。
二、人工智能辅助康复治疗的应用场景人工智能辅助康复治疗的应用场景非常广泛。
首先,针对运动神经系统的康复治疗,人工智能可以通过分析患者的运动数据,监测和评估康复进程,帮助康复师掌握康复效果,并根据结果进行调整和优化。
其次,对于脑卒中和脊髓损伤等病症的康复治疗,人工智能可以通过虚拟现实技术和机器人辅助康复设备,重新建立患者与外界的联系和交互,提高运动能力和生活质量。
同时,人工智能还可以通过智能床垫和座椅等设备,提供舒适和安全的康复环境。
再次,对于运动障碍和肌肉骨骼损伤的康复治疗,人工智能可以通过运动跟踪和智能治疗器械,帮助患者恢复运动功能和力量,减轻康复师的工作负担,提高治疗效果。
三、人工智能辅助康复治疗的实际案例人工智能辅助康复治疗的实际应用已经取得了一些显著的成果。
机器人辅助神经电生理治疗恢复疗法
机器人辅助神经电生理治疗恢复疗法随着科技的进步和医疗技术的不断发展,机器人辅助神经电生理治疗恢复疗法成为了神经学领域的一项重要且创新的治疗方法。
该疗法利用机器人技术与神经电生理治疗相结合,为患者提供了有效且个性化的康复支持。
神经电生理治疗恢复疗法是一种通过电刺激神经系统以促进神经元再生和神经突触重塑的方法。
这种治疗方法在许多神经系统疾病的康复治疗中得到了广泛应用,包括中风、脊髓损伤、帕金森病等。
然而,在传统的神经电生理治疗中,患者通常需要配合医生的指导来进行康复训练,这不仅费时费力,还限制了治疗的效果和应用范围。
而机器人辅助神经电生理治疗恢复疗法则能够有效地解决上述问题。
机器人技术的引入使得治疗操作更加精确和准确,可以根据患者的实际情况进行个性化的治疗方案制定。
机器人通过精密控制和模拟人类运动学来实现对患者肌肉和神经功能的刺激和训练。
这种治疗方式不仅能够帮助患者恢复动作和功能,还可以增强神经元的再生和连接,促进康复进程。
在机器人辅助神经电生理治疗恢复疗法中,最常见的技术是使用外部机器人装置配合神经电刺激设备。
这些机器人装置通常由多个关节组成,能够模仿人类运动,并在特定位置和角度施加刺激。
通过根据患者的康复需求进行精确调整,可以实现针对性的康复训练。
除了精确的刺激外,机器人辅助神经电生理治疗恢复疗法还具有远程监控和调整的优势。
患者可以使用远程设备来进行康复治疗,医生可以通过互联网或无线网络远程观察和指导患者的治疗进程。
这种方式既提高了治疗的便利性,也降低了患者和医生之间的时间和空间限制。
机器人辅助神经电生理治疗恢复疗法已经在临床实践中取得了一定的成果。
临床研究表明,与传统康复治疗相比,机器人辅助神经电生理治疗恢复疗法可以显著提高患者的康复效果和生活质量。
同时,该疗法还能够有效缩短康复周期,减少并发症的发生,降低医疗资源的消耗。
然而,机器人辅助神经电生理治疗恢复疗法在实际应用中仍存在一些挑战。
首先,机器人装置的成本较高,导致该疗法的普及受到限制。
医疗机器人康复治疗方法
医疗机器人康复治疗方法随着科技的不断进步,人工智能和机器人技术在医疗领域的应用变得越来越广泛。
其中,医疗机器人在康复治疗中发挥着重要的作用。
本文将介绍几种常见的医疗机器人康复治疗方法,以及它们在患者康复中的优势。
1. 运动康复机器人运动康复机器人主要用于神经康复治疗,可帮助患者进行运动训练和康复训练。
这些机器人一般由机械臂、传感器和控制系统组成。
机械臂能够根据患者的运动能力和康复目标进行调整,帮助患者完成各种运动动作。
传感器可以监测患者的运动状态和肌肉活动情况,从而为治疗师提供有关患者康复进展的指导。
控制系统则根据患者的需求进行运动模式的设定和调整。
2. 平衡康复机器人平衡康复机器人主要用于帮助患有平衡障碍的患者进行康复治疗。
这些机器人可以通过模拟真实场景和提供反馈来帮助患者恢复平衡能力。
机器人可以根据患者的平衡能力进行调整,为患者提供定制化的训练方案。
在训练过程中,机器人会记录患者的平衡状态和进展情况,为治疗师提供有价值的数据。
3. 感觉康复机器人感觉康复机器人主要用于恢复患者的触觉和运动感知功能。
这些机器人通常通过模拟触觉和提供反馈来帮助患者重新建立与外界的感觉联系。
机器人可以模拟不同的触觉刺激,并根据患者的反应进行调整。
在康复过程中,机器人可以识别患者的触摸和运动信息,为治疗师提供有关患者康复进展的指导。
4. 认知康复机器人认知康复机器人主要用于帮助患有认知障碍的患者进行康复治疗。
这些机器人可以通过模拟不同认知任务和提供反馈来帮助患者恢复认知能力。
机器人可以为患者提供个性化的认知训练,帮助他们提高记忆、注意力和问题解决能力。
在训练过程中,机器人可以记录患者的表现和进展情况,为治疗师提供有关患者康复进程的信息。
医疗机器人康复治疗方法具有以下优势:首先,机器人康复治疗可以提供个性化的康复方案。
每个患者的康复需求和能力不同,传统的康复治疗无法满足每个患者的个性化需求。
而机器人康复治疗可以根据患者的具体情况进行调整,为每个患者提供针对性的康复方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《物理治疗学》第二版
目录
• 预防帕金森病患者跌倒的步态和步伐训练
– 使用吊带支具:不能独立行走的患者使用减重系统 – 口头指导:迈大步(髋部伸展运动) – 使用节拍器 – 前后移动和横向移动训练
– 提高行走速度
《物理治疗学》第二版
目录
• 对于身体状况非常严重、且处于治疗初期阶段的患者,
要使用跑台训练
目录
《物理治疗学》第二版
目录
• 坐下的能力(也可用手支撑)
• 心血管状况:能够保持垂直的姿势10分钟,且血压没有降低
• 能理解治疗师的说明 • 下肢没有不稳定性骨折或严重的ห้องสมุดไป่ตู้质疏松
• 在安装吊带的部位没有压力点或开放性创伤
《物理治疗学》第二版
目录
• 使用吊带进行减重和保护
– 用于减重的吊带要固定在胸腔下部
目录
• 指导患者
– 放开单只胳膊支撑,直至两只胳膊都放开
– 抬头
• 如果条件允许:使用动态减重系统
《物理治疗学》第二版
目录
• 安全起见:患者要一直使用吊带支具
《物理治疗学》第二版
目录
• 支撑相末期时提高髋关节伸展度
《物理治疗学》第二版
目录
• 每周至少3次训练,每次20分钟
• 训练越多效果越好
《物理治疗学》第二版
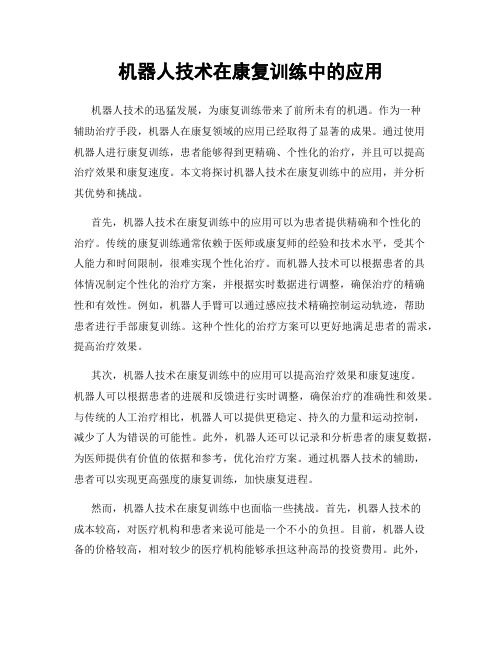
< FAC 2行走障碍:< FAC 2
Walking aids of any sort are not taken into consideration. 不使用任何的行走辅具
Category 分类 0 1 Degree of dependency 依赖程度 No gait ability 无步态能力 Dependancy/Degree II 依赖性/等级Ⅱ Dependancy / Degree I 依赖性/等级Ⅰ Attributes 特性 Patient is not able to walk or with help of 2 persons only 患者不能行走或只能在2人帮助下行走 Patient is dependent on continuous assistance of a person, who supports the weight and controls balance 患者需在一人连续扶持下减重并维持平衡 Patient is dependent on intermittent assistance of a person, who supports balance and coordination 患者在1人持续或间断扶持下行走 Patient requires verbal support, but no physical support of a person 患者只需口头鼓励,而不用身体扶持
• 使用普通鞋子
• 使用足部矫形器
《物理治疗学》第二版
目录
• 突发安全状况可使用紧急制动 • 要求患者在支撑相终末期完全伸展髋关节 • 患者训练时要平视,不可看着地面 • 要求患者在训练时对着镜子调整身体姿势 • 患者训练时需要一个节奏
《物理治疗学》第二版
目录
静态减重
• 患者的重心被一个稳定的作用力支撑
《物理治疗学》第二版
目录
• 在患者支撑相终末期旋前时给予辅助 • 如果必要,可由两名治疗师在患者两侧进行辅助
《物理治疗学》第二版
目录
• 对脚后跟的额外辅助
• 对膝部以上部位的额外辅助
• 由两名治疗师从患者后侧进行髋关节伸展运动
《物理治疗学》第二版
目录
• 问题:很薄的鞋底是否能更好地刺激承重感受器
• 尽可能少地控制减重的量(最大减重量不超过体重的1/3)
《物理治疗学》第二版
目录
• 当患者平躺、站立或坐下的时候安装吊带
• 往下拉至胸腔下部 • 将内部的带子拉紧 • 将腿部和髋关节的带子固定 • 可将带子绕过腿部
《物理治疗学》第二版
目录
• 注意吊带承重的时候不可滑动 • 注意吊带的压力点
28
《物理治疗学》第二版
目录
• 患者只有进行行走练习才能重新学会步行
• 使用跑台和电动机械设备进行训练
– 任务:以步行为训练目的
《物理治疗学》第二版
目录
• 关键因素是站立相和摆动相重复的量
• 使用跑台和机器人练习时,重复的次数会更多
《物理治疗学》第二版
目录
• 基于中枢模式发生器的原理
《物理治疗学》第二版
《物理治疗学》第二版
目录
• 指导:主动性
膝关节伸展
• 增加减重
《物理治疗学》第二版
目录
• 说明:移重至左侧
• 通过弯曲肘部实现移重
• 增加对健侧的减重(为什么?)
《物理治疗学》第二版
目录
• 增加姿势的变换
– 上举一只胳膊或两只胳膊
– 抬头
• 如有需要,治疗师需要协助患者矫正关节位置
《物理治疗学》第二版
第十七章
第一节
概述
第二节 机器人辅助肢体功能训练
第三节 物理治疗方法的发展及展望
目录
治疗型康复机器人 辅助型康复机器人
《物理治疗学》第二版
目录
其他分类
老年技术性(依据年龄特征) 生物机器人(根据设计理念) 神经机器人(针对神经功能恢复)
《物理治疗学》第二版
目录
• 美国的Lum PS • MIT-Manus • ReoGo • 其他
《物理治疗学》第二版
目录
• Lokomat
• Lokohelp • 其他
《物理治疗学》第二版
目录
外骨骼机械
操作型机械
《物理治疗学》第二版
目录
外骨骼和末端效 应器
自由度
《物理治疗学》第二版
目录
• 2001年Volpe等人使用MIT-MANUS
• 2010年《新英格兰医学杂志》上的报道
《物理治疗学》第二版
目录
• DEGAS的机器人辅助步行研究
《物理治疗学》第二版
目录
• 改善上肢活动的协调性
• 改善痉挛和疼痛
• 减轻上肢的残疾程度
《物理治疗学》第二版
目录
• 渐进式的治疗,训练动作阶段化 • 全方位的运动
《物理治疗学》第二版
目录
• ReoGo上肢康复机器人为例
《物理治疗学》第二版
目录
• 发现错误练习法
《物理治疗学》第二版
目录
• 两边的支撑杆调节到骨盆高度
• 将松紧带固定在患者的重心位置 • 如果有必要,可在患者前面加一 根支撑杆,并将患者与之固定
《物理治疗学》第二版
目录
• 将手/上肢用吊索或吊带固定 • 如有需要,可在肢体与吊索之间放置垫子或内衬
《物理治疗学》第二版
目录
• 站立相时
– 髋关节伸展 – 或前脚承重
《物理治疗学》第二版
目录
• 独立的步行能力 • 提高步行速度 • 改善步态质量
《物理治疗学》第二版
目录
• 事实证明
– 训练强度 – 训练任务的针对性 – 积极参与 – 加强运动协调的训练
以上为确保有效康复的关键因素
《物理治疗学》第二版
目录
• 强度:大量的重复运动
• 任务针对性:只针对步行进行训练 • 积极参与:治疗师尽可能不去辅助患者的行走 • 加强运动协调的训练:针对站立相和摆动相的练习
《物理治疗学》第二版
目录
LOKOHELP视频
《物理治疗学》第二版
总结
• 康复机器人的概念和分 类 • 康复机器人的举例和特 征 • 机器人辅助训练的疗效
总结
• 机器人辅助上肢功能练习的目标
– 上肢训练的条件和方法
– Reogo举例
• 机器人辅助步行的训练目标
– 跑台和机器人训练 – 减重 – 治疗师辅助 – LOKOHELP举例
物理治疗学目录
第一章 概论……………………………燕铁斌 中山大学孙逸仙纪念医院 第二章 关节活动技术…………………王俊 广东省工伤康复医院 第三章 体位转移技术…………………汪琴 第三军医大学附属西南医院 第四章 肌肉牵伸技术…………………陈和木 安徽医科大学第一附属医院 第五章 关节松动技术…………………燕铁斌 中山大学孙逸仙纪念医院 第六章 肌力训练技术…………………白跃宏 上海交通大学附属第六人民医院 第七章 牵引疗法………………………尚翠侠 西安交通大学医学院第一附属医院 第八章 平衡与协调训练………………金冬梅 中山大学孙逸仙纪念医院 第九章 步行功能训练…………………王翔 南京医科大学第一附属医院 第十章 神经发育疗法…………………黄杰 华中科技大学同济医学院附属同济医院 第十一章 本体神经肌肉促进技术………邱小红 长治医学院 第十二章 运动再学习技术………………范文双 哈尔滨医科大学附属第五医院 第十三章 强制性运动疗法………………杜平 齐齐哈尔医学院医学技术学院 第十四章 心肺功能训练…………………杜平 齐齐哈尔医学院医学技术学院 第十五章 引导式教育……………………范艳萍 佳木斯大学康复医学院 第十六章 虚拟环境训练技术……………李红玲 河北医科大学第二医院 第十七章 机器人辅助康复治疗…………李放 复旦大学附属华山医院 第十八章 直流电疗法……………………毛容秋 广西医科大学第一附属医院 第十九章 低频电疗法……………………毛容秋 广西医科大学第一附属医院 第二十章 中频电疗法……………………姜贵云 承德医学院附属医院 第二十一章 高频电疗法……………………姜贵云 承德医学院附属医院 第二十二章 光疗法…………………………吴军 大连医科大学附属第二医院 第二十三章 超声波疗法……………………王艳 黑龙江中医药大学附属第二医院 第二十四章 传导热疗法……………………刘曦 泸州医学院附属医院 第二十五章 压力疗法………………………张志强 中国医科大学附属盛京医院 第二十六章 磁疗法…………………………潘翠环 广州医学院第二附属医院 第二十七章 水疗法…………………………潘翠环 广州医学院第二附属医院 第二十八章 冷疗法与冷冻疗法……………王艳 黑龙江中医药大学附属第二医院 第二十九章 生物反馈疗法…………………李红玲 河北医科大学第二医院 第三十章 冲击波疗法……………………张志强 中国医科大学附属盛京医院 第三十一章 物理治疗文书…………………张志强 中国医科大学附属盛京医院