高速脉冲输入和输出
PLC高速脉冲输出PTO

PLC高速脉冲输 出PTO的性能测 试与优化
性能测试的方法与工具
测试方法:使用专业的测试设备对PLC高速脉冲输出PTO进行性能测试,包括脉冲频 率、脉冲宽度、脉冲精度等参数的测量和校准。
测试工具:使用PLC编程软件、示波器、计数器等工具进行性能测试,确保测试结果 的准确性和可靠性。
测试环境:在符合PLC高速脉冲输出PTO技术规格的环境下进行性能测试,包括温度、 湿度、气压等环境因素的考虑和控制。
与传统的模拟量输出相比,PLC高速脉冲输出PTO具有更高的精度和更广泛的应 用范围。
PLC高速脉冲输出PTO的原理
高速脉冲输出PTO的工作原理是通过PLC控制器产生高速脉冲信号,控制电机等执行机构的运动。 PLC高速脉冲输出PTO的脉冲频率、脉冲宽度和脉冲极性等参数可以通过编程进行精确控制。 高速脉冲输出PTO在自动化控制系统中广泛应用于位置控制、速度控制和张力控制等领域。 PLC高速脉冲输出PTO的可靠性高,稳定性好,能够适应各种复杂环境下的工业控制需求。
添加标题
添加标题
配置脉冲输出模块
添加标题
添加标题
调试和测试脉冲输出功能
编程实例及解析
编程环境:使用PLC厂商提供 的编程软件或集成开发环境 (IDE)
编程语言:使用C++或 Python等高级语言进行编 程
编程步骤:编写程序逻辑,配 置脉冲参数,测试和调试等
实例解析:以实际应用为例, 分析编程实现的过程和技巧
感谢您的观看
汇报人:XX
PLC高速脉冲输出PTO的应用场景
自动化生产线 控制
机器人关节驱 动
伺服电机定位 控制
高速计数与测 量
PLC高速脉冲输 出PTO的参数设 置
s7-200脉冲输出功能
一、 S7-200 PLC 高速脉冲输出功能1、概述S7-200 有两个置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。
当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制。
置PTO 功能提供了脉冲串输出,脉冲周期和数量可由用户控制。
但应用程序必须通过PLC内置I/O 提供方向和限位控制。
为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO 或位控模块的组态。
向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。
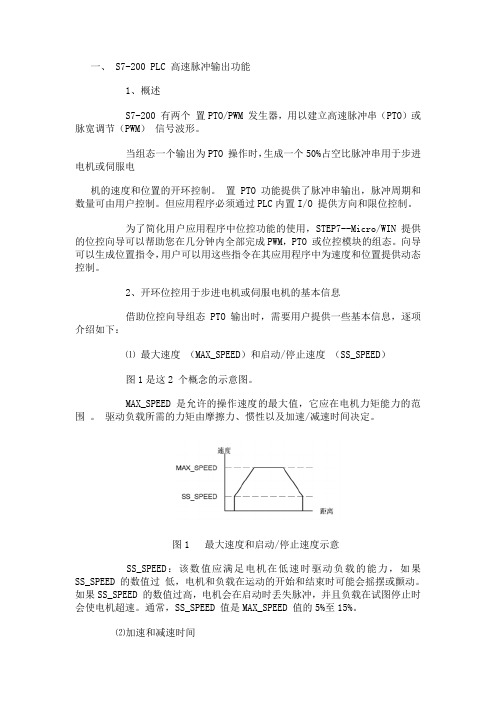
2、开环位控用于步进电机或伺服电机的基本信息借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下:⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)图1是这2 个概念的示意图。
MAX_SPEED 是允许的操作速度的最大值,它应在电机力矩能力的范围。
驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。
图1 最大速度和启动/停止速度示意SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED 的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。
如果SS_SPEED 的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。
通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和减速时间加速时间ACCEL_TIME:电机从 SS_SPEED速度加速到MAX_SPEED速度所需的时间。
减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。
图2 加速和减速时间加速时间和减速时间的缺省设置都是1000 毫秒。
通常,电机可在小于1000 毫秒的时间工作。
参见图2。
这2 个值设定时要以毫秒为单位。
FP0高速脉冲输出功能位置控制整理版

FP0高速脉冲输出功能脉冲输出功能利用FP0的高速计数器功能,可以实现两路脉冲信号的输出。
并且,若与脉冲控制的电机(如步进电机或数字式交流伺服电机等)一起使用,配以FP0的专用指令,可实现定位控制、梯形升降速控制、原点返回和点动等功能。
概述●利用FP0的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●指令F168能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●F168指令也能实现自动回原点功能。
●利用指令F169,可以实现点动(JOG)的脉冲输出。
设置系统寄存器当使用脉冲输出功能时,应将相应通道(CH0或CH1)的系统寄存器No.400和No.401设置为“不使用高速计数器”。
设置方法请参考“7.4.3的系统寄存器表”。
F168 位置控制(梯形控制/原点返回)根据设定的参数,从特定的输出点(Y0或Y1)输出特定形式的脉冲信号。
说明:●若控制标志(Control flag)(R903A或R903B)为OFF,且控制触点(如R0)为ON状态时,则从指定的输出点(Y0或Y1),按照数据表给定的参数输出一个特定形式的脉冲串。
● 数据表用于指定位控运动的控制码、起始速度、最大速度、加速/减速时间或目标值等。
● 根据加/减速时间,输出频率从起始速度升到最大速度。
通道 控制标志 当前值 目标值 方向输出 原点接近原点输入CH0 R903A DT9044,9045 DT9046,9047 Y2 DT9052,bit2 X0CH1 R903B DT9048,9049 DT9050,9051 Y3 DT9052,bit6X1运行模式说明:● 增量模式<相对值控制>根据目标的设置设定值,来输出相应脉冲数的脉冲。
将控制码(Control code )设置为H02(即:增量模式;正向:OFF ;反向:ON ),当目标值为正时,方向信号输出为OFF ,同时高速计数器的当前值增加。
三菱PLC高速输出——脉冲输出PLSY的讲解
三菱PLC⾼速输出——脉冲输出PLSY的讲解对于伺服或步进电机使⽤的脉冲输出控制指令,需要根据不同功能选择需要的指令,三菱PLC中的⾼速脉冲输出指令主要有16位的PLSY、PLSR、PLSV,32的DPLSY、DPLSR、DPLSV,今天就来说说基本的PLSY指令的介绍。
01三种指令(PLSY、PLSR、PLSV)的区别1)简单介绍下这⼏个的区别,PLSY是基本的脉冲输出,功能是发送指定频率和指定数量脉冲的指令;2)PLSR是带有加减速功能的脉冲输出指令,功能是发送指定频率和制动数量脉冲的指令,同时能指定从0到指定频率的时间或从指令频率到0的时间。
如果这个加减速时间设置为0则与PLSY指令⼀样;3)PLSV是输出带有旋转⽅向的可变速脉冲指令,功能是输出指定⽅向和指令频率的脉冲,它与PLSR区别是可在指令运⾏中改变频率,PLSR则是即使改变操作数运⾏中也不反映,在下⼀次指令驱动时更改内容有效。
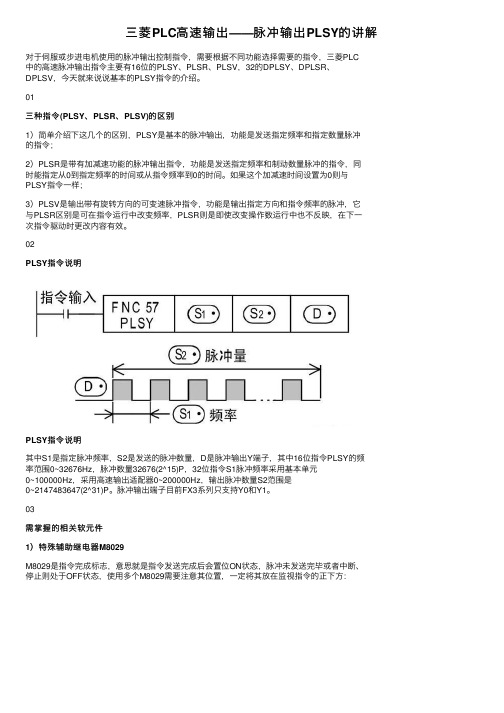
02PLSY指令说明PLSY指令说明其中S1是指定脉冲频率,S2是发送的脉冲数量,D是脉冲输出Y端⼦,其中16位指令PLSY的频率范围0~32676Hz,脉冲数量32676(2^15)P,32位指令S1脉冲频率采⽤基本单元0~100000Hz,采⽤⾼速输出适配器0~200000Hz,输出脉冲数量S2范围是0~2147483647(2^31)P。
脉冲输出端⼦⽬前FX3系列只⽀持Y0和Y1。
03需掌握的相关软元件1)特殊辅助继电器M8029M8029是指令完成标志,意思就是指令发送完成后会置位ON状态,脉冲未发送完毕或者中断、停⽌则处于OFF状态,使⽤多个M8029需要注意其位置,⼀定将其放在监视指令的正下⽅:M8029放置位置下⾯我们在三菱FX3g型PLC中看下指令的使⽤,XY双轴采⽤PLSY指令,X轴频率200p/s,脉冲数量2000p,Y轴脉冲频率500p/s,脉冲数量2500p,可以算出,X轴10s完成,Y轴5s完成,下⾯观察M8029的变化:M8029的变化从上图看出,Y轴脉冲发送完成后,M8029闭合,但只⽤Y轴下⽅的M8029有输出M201,X轴没有,等到X轴脉冲指令完成,M200才闭合,所以在放置M8029标志⼀定要注意位置。
西门子plc脉冲指令详解

西门⼦plc脉冲指令详解(1)脉冲输出(PLS)指令被⽤于控制在⾼速输⼊(Q0.0和Q0.1)中提供的“脉冲串输出”(PTO)和“脉宽调制”(PWM)功能。
PTO提供⽅波(50%占空⽐)输出,配备周期和脉冲数⽤户控制功能。
PWM提供连续性变量占空⽐输出,配备周期和脉宽⽤户控制功能。
脉冲指令如图所⽰。
(2) S7-200有两台PTO/PWM发⽣器,建⽴⾼速脉冲串或脉宽调节信号信号波形。
⼀台发⽣器指定给数字输出点Q0.0,另⼀台发⽣器指定给数字输出点Q0.1。
⼀个指定的特殊内存(SM)位置为每台发⽣器存储以下数据:⼀个控制字节(8位值)、⼀个脉冲计数值(⼀个不带符号的32位值)和⼀个周期值及脉宽值(⼀个不带符号的16位值)。
(3) PTO/PWM发⽣器和过程映像寄存器共⽤Q0.0和Q0.1。
PTO或PWM功能在Q0.0或Q0.1位置现⽤时,PTO/PWM发⽣器控制输出,并禁⽌输出点的正常使⽤。
输出信号波形不受过程映像寄存器状态、点强迫数值、执⾏⽴即输出指令的影响。
PTO/PWM发⽣器⾮现⽤时,输出控制转交给过程映像寄存器。
(4)过程映像寄存器决定输出信号波形的初始和最终状态,使信号波形在⾼位或低位开始和结束。
脉冲串(PTO)功能提供⽅波(50%占空⽐)输出或指定的脉冲数和指定的周期。
脉宽调制(PWM)功能提供带变量占空⽐的固定周期输出。
(5)每台PTO/PWM发⽣器有⼀个控制字节(8位)、⼀个周期值和脉宽值(不带符号的16位值)及⼀个脉冲计数值(不带符号的32位值),这些值全部存储在特殊内存( SM)区域的指定位置。
⼀旦设置这些特殊内存位的位置,选择所需的操作后,执⾏脉冲输出指令( PLS)即启动操作。
该指令使S7-200读取SM位置,并为PTO/PWM发⽣器编程。
(6)通过修改SM区域中(包括控制字节)要求的位置,可以更改PTO或PWM的信号波形特征,然后执⾏PLS指令。
可以在任意时间向控制字节(SM67.7或SM77.7)的PTO/PWM启⽤位写⼊零,禁⽤PTO或PWM信号波形的⽣成,然后执⾏PLS指令。
PLC高速脉冲输出PTO

3.EM253位控模块:用于速度和位置控制的附加模块。
PTO的功能是什么?高速脉冲串输出PTO的功能为: 输出指定数目,占空比为50%的方波脉冲串。
PTO的特点特点:高速脉冲串输出(PTO)方式下:只能改变脉冲的周期值和脉冲 数。
1.周期值 输出脉冲的周期以?s或ms为增量单位,变化范围分别是10~65 535?s或 2~65 535ms。
PTO的种类在PTO方式下,要输出多段脉冲串时,允许脉冲串排队。
PTO输出多段脉冲 的方式有两种: 1.单段PTO:定义一个脉冲串,输出一个脉冲串 (特性参数通过特殊寄存器 分别定义) 。
2.多段PTO:集中定义多个脉冲串,按顺序输出多个脉冲串(特性参数通过 包络表集中定义) 。
单段PTO1. 单段管线简述 用指定的特殊标志寄存器定义脉冲串特性参数(每次定义一个脉冲串)。
高速脉冲串输出中断及适用机型在PTO方式下:当输出完指定数量的脉冲后,产生高速脉冲段 输出中断。
1. PTO/PWM 0 的中断事件号是19 2. PTO/PWM 1 的中断事件号是20 3.注意 高速脉冲串输出时,CPU自动将PTO空闲位SM66.7(或SM76.7) 置1(空闲)。
高速脉冲输出适用机型输出高频脉冲信号时,应选用晶体管输出型 PLC(只适用于直 流负载)。
PLC高速脉冲输出PTO
高速脉冲输出指令(PTO)
PTO是什么?高速脉冲串输出PTO(Pulse Train Output)内置于西门子s7-200可编程控制器或s7-1200可编程控制器中,是其三 种开环控制方式之一,用于速度和位置控制。
注:西门子s7-200的三种开环控制方式为: 1.脉宽调制(PWM):用于速度,位置或占空比控制。
PLC高速脉冲输出

在高速脉冲输出编程中,需要注意以下几点
2. 考虑执行机构的响应特性
不同的执行机构(如伺服电机、步进电机等)具有不同的 响应特性,需要根据其特性进行相应的参数调整。
3. 使用位置反馈
为了提高定位精度和稳定性,可以使用位置反馈机制,通 过读取执行机构的位置信息进行实时调整。
1. 合理设置脉冲参数
根据实际需求,合理设置脉冲的频率、宽度、数量等参数 ,以保证执行机构能够准确、稳定地运行。
数控机床
在数控机床中,高速脉冲输出可用 于控制主轴的旋转速度和进给轴的 移动速度,提高加工精度和效率。
高速脉冲输出与伺服电机的控制
控制原理
高速脉冲输出通过向伺服电机发送高速脉冲信号来控制其运动。脉冲的频率、数量和方 向决定了电机的转速和位置。
伺服电机参数设置
为了实现精确的控制效果,需要对伺服电机的参数进行合理设置,包括增益、积分时间 常数等。
工智能等先进技术相结合,实现更加智能化、自动化的控制。
挑战
尽管PLC高速脉冲输出技术已经取得了很大的进展,但在实际应用中仍存在一些挑战, 如高脉冲频率下的稳定性和可靠性问题、不同控制系统之间的兼容性问题等。未来需要
进一步研究和改进,以解决这些挑战,推动PLC高速脉冲输出技术的更广泛应用。
THANKS FOR WATCHING
编程语言
PLC的编程语言主要有指令表(IL)、梯形 图(LD)、结构化文本(ST)等。
VS
开发环境
PLC的开发环境通常包括编程软件、仿真 软件和调试软件等,用于编写、调试和测 试PLC程序。
02
高速脉冲输出技术
高速脉冲输出的定义与特点
定义
高速脉冲输出是指可编程逻辑控制器 (PLC)通过其输出端口产生的高速 脉冲信号。
4路高速脉冲输出的应用例程说明
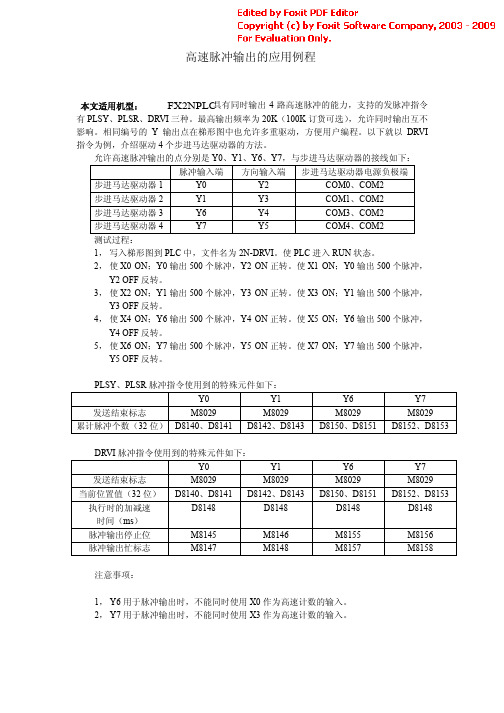
4 Y7Y5COM4FX2NPLC 高速脉冲输出的应用例程本文适用机型:具有同时输出4路高速脉冲的能力,支持的发脉冲指令有PLSY 、PLSR 、DRVI 三种。
最高输出频率为20K (100K 订货可选),允许同时输出互不影响。
相同编号的Y 输出点在梯形图中也允许多重驱动,方便用户编程。
以下就以DRVI 指令为例,介绍驱动4个步进马达驱动器的方法。
允许高速脉冲输出的点分别是Y0、Y1、Y6、Y7,与步进马达驱动器的接线如下:脉冲输入端方向输入端步进马达驱动器电源负极端步进马达驱动器1 Y0 Y2 COM0、COM2 步进马达驱动器2 Y1 Y3 COM1、COM2 步进马达驱动器3 Y6 Y4 COM3、COM2 步进马达驱动器、COM2测试过程:1, 写入梯形图到PLC 中,文件名为2N-DRVI 。
使PLC 进入RUN 状态。
2, 使X0 ON ;Y0输出500个脉冲,Y2 ON 正转。
使X1 ON ;Y0输出500个脉冲,Y2 OFF 反转。
3, 使X2 ON ;Y1输出500个脉冲,Y3 ON 正转。
使X3 ON ;Y1输出500个脉冲,Y3 OFF 反转。
4, 使X4 ON ;Y6输出500个脉冲,Y4 ON 正转。
使X5 ON ;Y6输出500个脉冲,Y4 OFF 反转。
5, 使X6 ON ;Y7输出500个脉冲,Y5 ON 正转。
使X7 ON ;Y7输出500个脉冲,Y5 OFF 反转。
PLSY 、PLSR 脉冲指令使用到的特殊元件如下:Y0 Y1 Y6 Y7发送结束标志 M8029 M8029 M8029 M8029 累计脉冲个数(32位) D8140、D8141D8142、D8143D8150、D8151 D8152、D8153DRVI 脉冲指令使用到的特殊元件如下:Y0 Y1 Y6 Y7发送结束标志 M8029 M8029 M8029 M8029 当前位置值(32位) D8140、D8141D8142、D8143D8150、D8151 D8152、D8153执行时的加减速 时间(ms )D8148 D8148 D8148 D8148脉冲输出停止位 M8145 M8146 M8155 M8156 脉冲输出忙标志 M8147 M8148 M8157 M8158注意事项:1, Y6用于脉冲输出时,不能同时使用X0作为高速计数的输入。