西门子plc硬件组态HWConfig
西门子S7-200SMART硬件设备组态
西门子S7-200SMART硬件设备组态
西门子S7-200 SMART提供各种类型I/O点数丰富的CPU模块、扩展模块和信号板,对于不同的应用需求能够提供更加经济、灵活的解决方案。
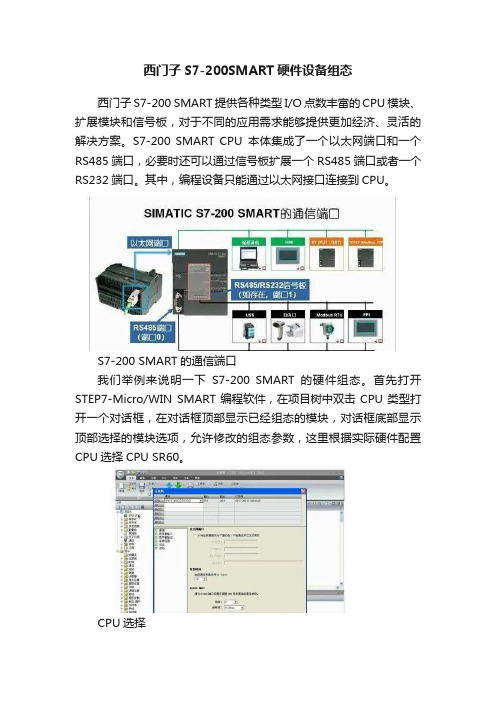
S7-200 SMART CPU本体集成了一个以太网端口和一个RS485端口,必要时还可以通过信号板扩展一个RS485端口或者一个RS232端口。
其中,编程设备只能通过以太网接口连接到CPU。
S7-200 SMART的通信端口
我们举例来说明一下S7-200 SMART的硬件组态。
首先打开STEP7-Micro/WIN SMART编程软件,在项目树中双击CPU类型打开一个对话框,在对话框顶部显示已经组态的模块,对话框底部显示顶部选择的模块选项,允许修改的组态参数,这里根据实际硬件配置CPU选择CPU SR60。
CPU选择
信号板选择通信板SB CM01,端口类型选择RS232,EM0选择EM DE08(8开关量输入),同样的选择其他的扩展模块。
所有模块的I/O地址统一自动分配,不可更改。
组态完成后单击确定按钮,这时项目树中的CPU类型更改为所选的类型。
选择所需硬件设备
今天我们简单介绍了西门子S7-200 SMART硬件设备组态,在以后的文章中我会继续分享关于西门子S7-200 SMART的其他知识点,欢迎大家持续关注!。
plcse
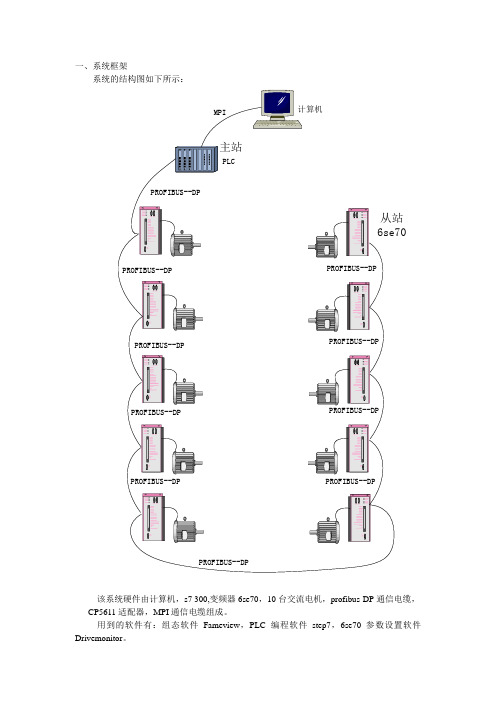
一、系统框架系统的结构图如下所示:该系统硬件由计算机,s7 300,变频器6se70,10台交流电机,profibus-DP通信电缆,CP5611适配器,MPI通信电缆组成。
用到的软件有:组态软件Fameview,PLC编程软件step7,6se70参数设置软件Drivemonitor。
计算机上装有Fameview软件和step7,Drivemonitor。
PROFIBUS – DP的DP即Decentralized Periphery。
它具有高速低成本,用于设备级控制系统与分散式I/O的通信。
用于现场层的高速数据传送。
主站周期地读取从站的输入信息并周期地向从站发送输出信息。
总线循环时间必须要比主站(PLC)程序循环时间短。
本系统是单主站多从站式网络控制系统,并配有监控层。
PLC为主站,计算机处于监控层,配有通信板CBP2的变频器为从站。
主站只有一个,从站有10个。
变频器6se70是不能通讯的,必须安装通信板CBP2才能通信。
系统工作原理:计算机通过Fameview来实现对s7 300中数据的读取和修改。
PLC通过profibus-dp电缆读取变频器中的实际转速值,并将数据传输给计算机。
计算机将给定值和开关量通过PLC传输给变频器,从而改变变频器的输出,进而控制电动机的启停,改变电机的转速。
PLC是变频器的直接控制器,计算机通过PLC间接实现对变频器的控制。
二、6se70参数设置使用简单的应用参数设置,参数设置如下:P060=7P071=380v(输入装置进线电压)P100=3(开/闭环控制类型)3:不带测速机的矢量控制P101=220v(电动机的额定电压)P102=1.1A (电动机的额定电流)P107=50Hz (电动机的额定频率)P108=1420r/min (电动机的额定转速)P109=2 (电动机的极对数)P368=6 (选择设定值和命令源)6代表设定值和命令来自于profibus即CBP板。
西门子s7-300系列plc硬件组态
可变编址
2x
SIMATIC® S7
Siemens AG 2003. All rights reserved.
Date: File:
2016/4/23 HWConfig.10
SITRAIN Training for
Automation and Drives
硬件组态: 编辑符号名, 监视/修改变量
单击右键
120.0 to 123.7
124.0 to 127.7
PS 机架 2
IM
(接收)
64.0 to 67.7
68.0 to 70.7
72.0 to 75.7
76.0 to 79.7
80.0 to 83.7
84.0 to 87.7
88.0 to 91.7
92.0 to 95.7
PS
机架 1
IM
(接收)
32.0 to 35.7
SIMATIC® S7
Siemens AG 2003. All rights reserved.
Date: File:
2016/4/23 HWConfig.11
SITRAIN Training for
Automation and Drives
CPU 属性:循环 / 时钟存储器
双击
时钟存储器位 频率 (Hz) 周期 (s)
S7-300™模块编址
槽号 1 2 4 5 6 7 8 9 10 11
模块
PS
CPU
SM
SM
SM
SM
SM
SM
SM
SM
地址 0.0 地址 0.7 地址 1.0 地址 1.7
SIMATIC® S7
Siemens AG 2003. All rights reserved.
西门子PLC组态方法

西门子PLC组态方法硬件连接软件组态1、在桌面打开S7tgtopx Manager软件2、点击“File”中的“New”新建文件3、输入新建文件的“名称”(如“zourz”)4、右击“zourz”选择“Insert New Object”中的“SIMATIC 400 Station”5、双击“Hardware”6、PLC组态选择“背板”展开“SIMA TIC 400”选择“BACK-400”,在“BACK-400”中选择与背板相对应的编号“6ES7-400-1JA01-0AA0”即“BACK-400”中的“UR2”,双击“UR2”再点击“OK”完成“背板”选择7、选择“PS-400”展开“SIMATIC 400”选择“PS-400”中的“Standard PS-400”,在“Standard PS-400”中选择编号为“6ES7-407-0KA02-0AA0”即“Standard PS-400”中的“PS 407 10A”,双击“PS 407 10A”再点击“OK”完成“PS-400”选择8、选择“CPU”展开“SIMATIC 400”选择“CPU-400”中的“CPU 416-3 PN/DP”,在“CPU 416-3 PN/DP”中选择“V5.3”双击,在弹出的对话框中可以修改IP地址点击“New”在弹出的对话框中可以重命名“PN网络”名称,然后点击“OK”,“OK”9、选择“CP”展开“SIMATIC 400”选择“CP-400”中的“CP 443-1 Advanced-IT”,在“CP 443-1 Advanced-IT”中选择“6GK7 443-1GX20-0EX0”中的“V2.0”双击,在弹出的对话框中直接点击“OK”完成“CP”选择10、选择“DI”展开“SIMATIC 400”选择“SM-400”中的“DI-400”,在“DI-400”中选择“DI16xDC24V11、选择“DO”展开“SIMATIC 400”选择“SM-400”中的“DO-400”,在“DO-400”中选择“DO16xDC24V 、2A”双击,在弹出的对话框中直接点击“OK”完成“DO”选择12、选择“AI”展开“SIMATIC 400”选择“SM-400”中的“AI-400”,在“AI-400”中选择“AI16x16Bit”双击,在弹出的对话框中直接点击“OK”完成“AI”选择13、选择“AO”展开“SIMATIC 400”选择“SM-400”中的“AO-400”,在“AO-400”中选择“AO8x13Bit”双击,在弹出的对话框中直接点击“OK”完成“AO”选择点击“编译”在弹出的对话框中点击“OK”点击“下载”在弹出的对话框中点击“OK”在弹出的对话框中点击“View”在弹出的对话框中选择MAC号位“00-0E-8C-A7-9F-82”的PLC(选择PLC),然后点击“OK”在弹出的三个对话框中都点击“OK”,然后“硬启动”PLC看状态是否正常。
基于西门子S7-300系列PLC定时功能的实现
高级班
章优仕
2013年8月
基于西门子S7-300系列PLC 定时功能的实现
The Implementation of Timer Function Based on the Siemens S7-300 Series PLC
一、定时器的概念
等待响应 时序构造 定时计数 人为制造 中断 产生时间 脉冲
Acc_T=Time_Count - Acc_M
if (Acc_T>Timer_Set) { O:Out_timer=True} ON延时
43 2013-8-12
2.4、利用扫描周期实现定时
FC1程序清单
A JC L T R JU M001: L L -I JN L T
44
#Enabled M001 0 #Acc_M #Out_Timer M000 #Acc_M 0 M002 #Time_Count #Acc_M
{ C_100msec=C_100sec + Trunc(SCR/Time_Base)*Time_Base
SCR=Trunc(SCR/Time_Base) O:Out_100msec=Out_100msec + SCR} 100ms为单位 记录当前更 新时间
2013-8-12
40
2.4、利用扫描周期实现定时
X0 M0
T0
M0
X0 M1 N T0 M2 T0 SD S5T#10S Y0
M2
M0
2.1.1 定时器的典型应用
5、SF定时器
TOF
下降沿起动, 运行时高电平
2.1.1 定时器的典型应用
【例5】断开延时控制程序(E05_2)
X0
PLC中PWM功能模块的应用研究
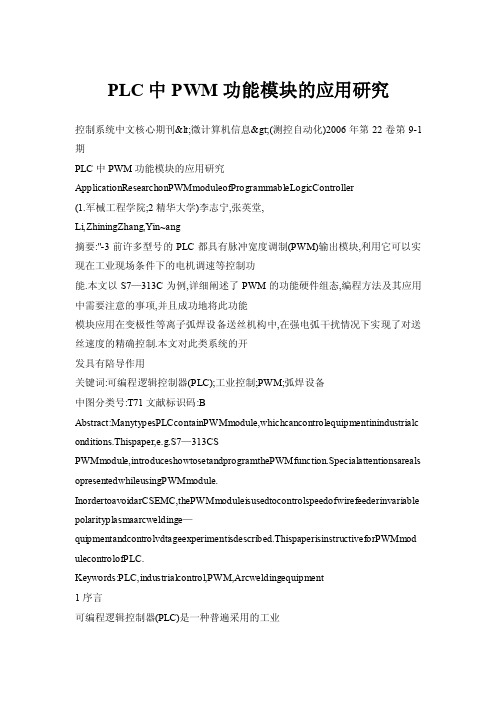
PLC中PWM功能模块的应用研究控制系统中文核心期刊<微计算机信息>(测控自动化)2006年第22卷第9-1期PLC中PWM功能模块的应用研究ApplicationResearchonPWMmoduleofProgrammableLogicController(1.军械工程学院;2精华大学)李志宁,张英堂,Li,ZhiningZhang,Yin~ang摘要:"-3前许多型号的PLC都具有脉冲宽度调制(PWM)输出模块,利用它可以实现在工业现场条件下的电机调速等控制功能.本文以S7—313C为例,详细阐述了PWM的功能硬件组态,编程方法及其应用中需要注意的事项,并且成功地将此功能模块应用在变极性等离子弧焊设备送丝机构中,在强电弧干扰情况下实现了对送丝速度的精确控制.本文对此类系统的开发具有陪导作用关键词:可编程逻辑控制器(PLC);工业控制;PWM;弧焊设备中图分类号:T71文献标识码:BAbstract:ManytypesPLCcontainPWMmodule,whichcancontrolequipmentinindustrialc onditions.Thispaper,e.g.S7—313CSPWMmodule,introduceshowtosetandprogramthePWMfunction.Specialattentionsareals opresentedwhileusingPWMmodule.InordertoavoidarCSEMC,thePWMmoduleisusedtocontrolspeedofwirefeederinvariable polarityplasmaarcweldinge—quipmentandcontrolvdtageexperimentisdescribed.ThispaperisinstructiveforPWMmod ulecontrolofPLC.Keywords:PLC,industrialcontrol,PWM,Arcweldingequipment1序言可编程逻辑控制器(PLC)是一种普遍采用的工业控制设备,它抗干扰性能好,可靠性高,已经在工业生产中得到了广泛的应用.随着PLC制造技术的不断进步,PLC已经不仅仅输入,输出逻辑继电器的组合,而是一个集成了A/D,D/A,PROFIBUS以及PWM等模块的复杂设备,可以实现比较复杂的工业现场过程控制功能.并可按照不同现场总线的要求,组成FCS系统, 实现工业生产现场控制自动化.许多型号的PLC.如s7—200,s7—300,FP0,FP1,CJ1M等.都集成了PWM功能模块.利用它可以方便地实现如电机调速等控制功能.本文针对$7300系列中的S7—313C型PLC的PWM功能模块.研究了其PWM功能开发中的软硬件组态以及编程方法.结合其在变极性等离子弧焊设备中的实际应用.阐明了开发中应该注意的事项.对今后进行此类开发的技术人员具有指导作用.2PWM功能组态及其编程方法正确使用PWM功能主要包括有硬件组态,软件编程和故障处理三个方面.下面分别论述.2.】PWM功能硬件组态方法在S7—313C中.PWM的输出脉冲频率范围为0~李志宁:讲师在读博士本研究得到国家自然科学基金项目资助(50175109) 2.5KHz,脉冲输出启动的延迟设定范围为0-250s,在PLC程序运行期间,输出脉冲周期和占宽比可通过软件编程调整.从硬件角度看,S7—313C的PWM模块功能端有三个,其物理地址为300Hex,301Hex,302Hex.在整个硬件系统中,它们与输出功能端Q124.o,Q124.1,Q124.2是复用的,也就是说.如果将这三个输出端用做PWM端输出.则不能用它来实现输出功能.反之亦然.除此以外,此模块功能端与计数,频率测量模块的功能端之间也是复用的关系.S7—313C系统软件默认将这三个功能端设置为普通输出功能端,故如果要实现PWM输出功能.首先要通过开发机(一般为PC机)上的SIEMENSE的STEP'/ 软件(PLC集成环境开发软件)中的硬件组态功能窗口来设置三个输出端为PWM输出.具体的说,需要设定其输出脉冲的周期,脉冲输出的延时长度以及时基.此过程需要调用参数赋值界面.主要有以下步骤: (1)启动STEP软件的SIMATIC管理器,在项目中调用HWConfig(硬件组态界面)(2)双击硬件组态界面中的"计数"子模块.打开"属性"对话框.如图1所示.图1所示是将PWM输出0通道的脉冲周期设置为1ms,最小时基(timebase)为0.1ms,其余两个通道设置方法类似.延时功能主要用于精确的时序控制中.本文中的例子无此要求,故将延时设定为0.一42—3607r.,,年邮局订阅号:82-946控制系统岫d-'匪:_[互]一』~.J图1PWM通道参数设置界面(3)组态完毕后,点击"OK",关闭参数赋值屏面格式.(4)使用Station>Saveandcompile,将组态保存在"HWConfig"中.(5)将S7—313C的CPU处于"STOP"模式中时,点击PLC>Downloadtomodule,就可以将参数数据通过PLC与开发机之间的编程电缆下载到PLC中.这样输入的组态参数就会保存在PLC系统数据存储器中,然后启动PLC,PWM功能组态完成.通过上述步骤组态完毕后,只是使PLC具备了输出PWM波的硬件基础.当PLC运行期间,PWM脉冲波的启动和停止以及输出脉冲的调制,则需要对PLC 程序控制来实现.2.2PWM功能编程控制方法在S7—313C控制软件中,PWM输出启动,停止和参数调整均是通过调用固化在PLC内部系统软件中的特殊功能块SFB49(一种系统级的功能子程序)及SFB49对应的背景数据块实现.背景数据块的数据数据结构是一定的,但是数据块号可任意指定,本文将数据块设为DB49.正确调用SFB49的关键就是明确其形参的意义,并且按照要求设计SFB的数据块DB49.SFB49需要组态的输入的形参,即PWM功能的启动,停止和占宽比调节等参数的含义和取值范围,如表1所示.表2是SFB49调用后的输出参数表,可以利用输出参数的状态来进行程序进程控制.表1输入参数输入参数数据类型地址}数据含义参数范围LADDRWORD0通道的物理地址300-302Hex CHANNELINT2通道号o-2SW_ENBOO..ue/FALSeMAN—D0B00L4.1硬件控制输出TRUE/FALSESET—D0B00L4.2输出控制TRUE/FALSE0UTPV ALIblT6.0指定输出值O一1000地址是指此数据在背景数据块中的地址.表2输出参数为了能调用SFB49功能块,要在STEP7的环境下按照表1,2,3,4要求创建DB49,关键是要保证每个数据的地址与类型要严格与表1,2,3,4中的地址和类型相对应,详细创建与组态方法参考文献3.启动和停止PWM功能有两种方法:一种利用SFB49控制DB49中的SW_EN实现PWM软件启动和停止,即如果将SW_EN设定为True,则PWM功能启动,如果将SW_EN置为False,则PWM功能停止; 另一种方法是硬件启动,在图1中选中Hardwaregate 选项,并将表1,2中的MAN—Do和Set_Do设定为True即可由PWM模块的硬件门端子控制启停.除了PWM波信号的启动和停止功能,实际工作中对PWM波调节功能主要有占空比,输出脉冲周期两项,下面分别介绍:2.2.1PWM波输出占空比调节占空比设定值由输入参数OUT_VAL来控制,其与输出PWM波占空比之间的关系式是:D:=—OUT_—V AL1000①OUT_VAL的取值范围为O一1000.例如:需要实现输出脉冲的占空比D=0.2,则将OUT_VAL置为200即可.下面的程序是控制PWM通道2启动,设定占空比为0.2,软件控制输出,不进行硬件控制和输出周期参数调整.CALLSFB49,DB49(LADDR:=Ⅵr#l6#302.CHANNEL:=2.SWEN:=TRUE.MAN_DO:=FALSE,SETDO:=FALSE.OUI.PV A1.z=20o.JOB—REQ:=FALSE,JOBjD:=W#16#1,JOB_VAL:=MD136);2.2.2PWM输出脉冲周期参数调整@霸邮局订82舢360~L/#-_43—控制系统中文核心期刊l=微计算机信息>(测控自动化)2006年第22卷第£}-1期如果要对PWM输出周期参数值进行调整,则需要组态表3所示的输人参数,而表4的功能输出参数则主要是为故障处理使用.表3脉冲宽度调制输入参数输出参数数据类型地址数据含义参数范围下面以利用SFB49调整输出脉冲周期为例.先将JOB—REQ设定为TRUE,再令JOB—ID为01,给定JOB_VAL值,则调整后的输出脉冲的周期,式中为0.1ms或者lms,JOB—V AL的数据类型为长整型.下面的程序代码就是将PWM通道2设置为的PWM输出,且将脉冲宽度调整为10ms(). CALLSFB49.DB49fLADDR:=W#16#302,(:HANNEL:=2.SWEN:=TRUE.MANDO:=FALSE.SETDO:=FALSE.OUrⅡ)_VAL:=200,JOB_REQ:=TRUE,JOB_ID:=W#16#1,JOB—V AL:=I~100);本文两个例程均利用了STL语言编写.并在STEP7V5.2集成开发环境下调试通过.3_3故障处理表4SFB49功能输出参数输出参数数据类型地址数据含义参数范围JOBDONEBOOL16.3启动作业TRUE/FALSE一使能JOB_ERRBOOL16.4错误作业TRUE/FALSEJOB-SWORD18错误编号0一开唧ex当程序调用SFB49出现错误时,会在PLC作业中产生错误报文.主要有两种错误,即作业错误和基本组态错误.作业错误发生在作业编译或作业执行过程中.如果出现错误,"JOB_ERR"参数将被置为"TRUE".如果出现基本的组态错误,则会触发系统错误,例如"错误的操作模式".参数"BIE"被置为FALSE,指示产生了一个系统错误.这些错误可以利用SFB49的功能输出参数值(见表4)来定位.当故障发生后,此时PLC的CPU会处于"STOP"模式,此时可以通过STEP7软件的"HWConfig"界面来获得故障的代码,也可将背景数据块DB49中的JOB_STA T值读出,得到错误编号.3应用中的注意事项3.1PWM功能端与输入功能端之间互锁如果在此型号的PLC中设定使用了PWM功能后,与PWM通道0,1,2对应有三个输入端1124.1,1124.3,1124.5就不能够作为普通的输入端使用了.在此型号的PLC中规定,如果1124.1为高电平,则相应的PWM的0通道停止输出.事实上,这三个输入端是为用户开发基于PWM模块的闭环控制系统预留的功能端.如果仅仅使用PWM功能,而不利用此功能和其他的外围设备构成闭环控制,则可以简单地将1124.1, 1124.3,1124.5悬空或接低电平.3.2PWM输出脉冲的占空比调节范围这是一个在应用中容易被忽略而引起故障的问题.在图1中PWM通道参数设置窗口,有一个选项为'minimumspulseperiod'.本文的设置值为0.2ms.根据此型PLC规定,输出PWM脉冲的占宽比调整范围为1.0.2ms.,一r-0._2m~.1,T为输出脉冲的周期(ms).那么调LY.TJ 用SFB49时,输人参数OUTP_V AL应满足②式:1000×0.2ms<OUTPV AL1000×—T-0—.2ms⑦..一如果OUTPVAL<1000×—0.2—ms,则输出的脉冲的一一一全周期始终为低电平;如果OUTP—V AL>1000×—T-0—.2ms,. 则输出脉冲的全周期始终为高电平,即在这两种情况下,调用SFB49已经不能对输出脉冲占空比进行调节了.在下面的应用实例中还会用到这一约束条件.4应用实例在笔者研究的变极性等离子弧焊设备中.对送丝速度的控制是利用MillerS一64送丝机实现的.其速度控制端需要0—8V的模拟电压.为了使弧焊设备控制器在强电弧干扰环境下能稳定工作,本文选用了S7—313C型PLC作为系统的焊接工艺过程控制器.此型PLC内含D/A模块,但是在弧焊设备工作现场,如果采用D/A输出模块产生模拟电压来直接控制送丝机.一44—36O元,年邮局订阅号:82.946控制系统由于D/A输出端必然要同送丝机控制电路共地,而送丝机与焊接:【件之间有电气联系,高频引弧和焊接电弧产生的电磁干扰将对PLC的D/A模块形成干扰,导致D/A模块的输出控制电压难以保持稳定,直接影响送丝机的调速精度,严重时可能损坏D/A模块.本文采用了图2所示的控制方案,核心是通过调节PWM波占空比来产生送丝机控制电压,具体就是通过光电隔离装置将PLC中的PWM输出端和送丝机进行电气隔离,利用比例积分电路将PWM波的脉冲信号变为与PWM波占空比成线性关系的送丝机控制电压图2利用PWM波产生送丝机控制电压示意图在本文中,通过对实际的PWM波的占空比及其对应输出控制电压的测试数据进行回归分析,得到如下的控制电压和占空比之间的线性关系表达式:U=仅D+b③U一送丝机控制电压(V),D~PwM波占空比,O~---- 15.2V,b=一1.64V.根据本文实际的电路参数需要,取输出PWM波频率f=500Hz,根据前面所述的最小脉冲宽度公式②, 可知0.1≤D≤O.9,代入③式,可知输出控制电压的范围0V≤U≤12V.满足对送丝机调速控制电压范围的要求.实际焊接过程中,根据送丝速度设定值,可得所需要的控制电压值,再利用公式③反推出调用SFB49 时OUTP—VAL需要设定的参数值.2015S10351086S342一f'~00HzD=02■■●-I●■l■lIl_■f=50OHzD=051一,,:""图3不同占空比条件下PWM波及控制电压波形图3(a),(b)所示是D=0.2,0.5时PWM波形,图3(C),(d)是其产生的控制电压波形.由图3可知,当D=0.2时,U=2.0V,当D=0.5时,U=6.1V(此处U为平均值).由图3可见,此电路输出的控制电压有一定的波动,但因为送丝机是一个惯性环节,其时问常数为0.1~0.2S.所以这样的高频波动对送丝速度控制基本无影响.经过实际测试,此设备的送丝速度控制精度达1-2mm/s,现在此设备已经投入了焊接生产中.5结束语PLC中的PWM功能模块可靠性高,特别适应工业环境下的设备控制,其PWM波频率输出范围宽,占空比和输出脉冲宽度可以编程调整,并且具有硬件启停控制功能,使用简便可靠.本文的创新之处在于在变极性等离子弧焊设备中采用了S7—313C的PWM模块结合外部的光电隔离以及比例积分电路,实现了在电弧干扰环境下对送丝速度的精确控制,此应用实例对今后此类设备的开发与控制具有指导意义.参考文献:[1lCPU31xCtechnologicalfunctions[Z].SIEMENSE:2001.10[21S7—200与S7—300应用论文集[Z1.SIEMENSE:2002.4 [3]SIMATICSTEP7V5.2编程使用手册[Z】.SIEMENSE:2003.2 魏先民.PLC控制系统应用的抗干扰问题研究[J】微计算机信息.2005.18:65—67;『5】姜启源,何青,高立.数学实验[M】.北京:高等教育出版社, 1999.作者简介:李志宁,男,1972年8月出生,汉族,硕士.现为军械工程学院火炮工程系讲师,并在清华大学机械工程系攻读博士学位,主要研究方向为高能束加工与控制等,E—mail:*********************;都东,男,1962年8月出生,汉族,博士.现为清华大学机械工程系教授,博士生导师,材料加工与自动化研究所所长.主要研究方向为材料加工过程建模与控制,机器人技术与应用等.Biography:Mr.LiZhining,bornonOctoberin1972,receivedM. SdgreefromOrdnanceEngineeringCollege.Heisinstructorof OrdnanceEngineeringCollegeandcurrentlyworkingtowardthe Ph.D.de~eeatdepartmentofMechanicalEngineeringof TsinghuaUniversity.Hismainresearchsubjectisprocessand controlusinghigh-energybeam.(050003军械工程学院火炮工程系)李志宁张英堂(100084清华大学机械工程系)李志宁张英堂(OrdnanceEngineeringCoHegeArtilleryDepartment)Li, ZhilIingZhang,Yingtang (TsinghuaUniversityMechanicalEngineeringDepartment)Li, ZhiIIingZhang,Yingtang通讯地址:(100084北京市清华大学机械工程系焊接馆109)李志宁(投稿日期:2006.1.121(修稿日期:2006.2.16)国自控搠邮局订阅号:82.94636o元,年一45—。
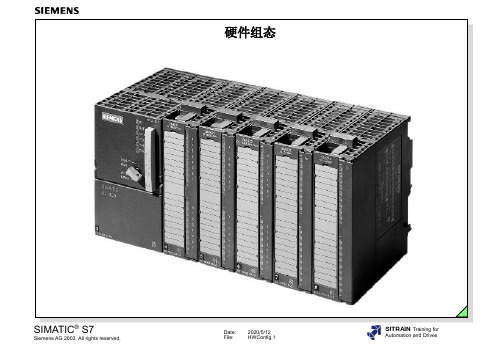
硬件组态
显示硬件诊断
Diagnosing Hardware 这个功能打开能 够在线连接的站并且提供关于模板状态或操 作模式的信息.你可以看见模板或CPU操作 模式的诊断信息 .当双击符号时会弹出一个 包含更多信息的屏幕.
可以用如下方式打开:
√ 在 SIMATIC Manager
√ 用 PLC-> Hardware Diagnose
选择I/O模板的这一行 选 Edit Symbolic Names.
给每个通道提供符号名称和可能的注释.表中的符号名是提供给S7程序的.
当使用新的设备块时,只需用知道名称.设备会自动得到模板的设定,考虑到它们的输入/输出和它们所占的槽 . 基于明确的信号名额外的定义不再需要.所有设定从设备的硬件组态和参数读出.
如何组态硬件 ?
在项目中,选择组态的AS,在硬件组态中使用硬件目录来寻找和配置组件(框架,电源,CPU,通讯板和I/O 模板)
组态框架 SIMATIC 400 -> Rack 400 -> UR1
使用鼠标拖放将移动到左上窗口,之前必须在目录下方窗口检查详细的描述(订货号和注释)
组态电源 SIMATIC 400 -> PS 400 -> e.g. PS 407 10A
下载AS硬件配置到PLC
后续下载 在完成配置的改变后,建议选择系统总线方式进行后续下载
Start -> SIMATIC -> SIAMATIC NET-> Settings -> Set PC Station Important : 在创建了和MPI接口的通讯后,CP 443-1作为以太网CP,软件下载可以用以太网总线, 通讯速度更快. 下载硬件组态只有在网络配置下列步骤完成后进行.
plc和以太网通讯协议
竭诚为您提供优质文档/双击可除plc和以太网通讯协议篇一:西门子s7-1200与s7-300plc的以太网tcp及isoontcp通信1.概述1.1s7-1200的pRoFinet通信口s7-1200cpu本体上集成了一个pRoFinet通信口,支持以太网和基于tcp/ip的通信标准。
使用这个通信口可以实现s7-1200cpu与编程设备的通信,与hmi触摸屏的通信,以及与其它cpu之间的通信。
这个pRoFinet物理接口是支持10/100mb/s的Rj45口,支持电缆交叉自适应,因此一个标准的或是交叉的以太网线都可以用于这个接口。
1.2s7-1200支持的协议和最大的连接资源s7-1200cpu的pRoFinet通信口支持以下通信协议及服务tcpisoontcp(RcF1006)s7通信(服务器端)通信口所支持的最大通信连接数s7-1200cpupRoFinet通信口所支持的最大通信连接数如下:3个连接用于hmi(触摸屏)与cpu的通信1个连接用于编程设备(pg)与cpu的通信8个连接用于openie(tcp,isoontcp)的编程通信,使用t-block指令来实现3个连接用于s7通信的服务器端连接,可以实现与s7-200,s7-300以及s7-400的以太网s7通信s7-1200cpu可以同时支持以上15个通信连接,这些连接数是固定不变的,不能自定义。
tcp (transportconnectionprotocol)tcp是由RFc793描述的标准协议,可以在通信对象间建立稳定、安全的服务连接。
如果数据用tcp协议来传输,传输的形式是数据流,没有传输长度及信息帧的起始、结束信息。
在以数据流的方式传输时接收方不知道一条信息的结束和下一条信息的开始。
因此,发送方必须确定信息的结构让接收方能够识别。
在多数情况下tcp应用了ip(internetprotocol),也就是“tcp/ip协议”,它位于iso-osi参考模型的第四层。
组态王与西门子S7-200的几种通信方式
组态王与西门子S7-200的几种通信方式1 引言随着工业自动化技术的发展,人们对自动化监控系统的要求越来越高。
而在设计开发实时监控系统时,现场设备与上位机软件的通讯是关键技术,下面主要介绍国产流行工控软件“组态王”与西门子S7-200的通信方式。
2 组态王简介“组态王”是在PC机上建立工业控制对象人机接口的一种智能软件包,它以Windows 98/Windows 2000/ Windows NT4.0中文操作系统作为其操作平台,具有图形功能完备,界面一致友好,易学易用的特点。
该软件包由工程管理器(ProjManager)、工程浏览器(TouchExplorer)、画面运行系统(TouchVew)三部分组成。
ProjManager用于新建工程、工程管理,并能对已有工程进行搜索、备份及有效恢复,实现数据字典的导入和导出。
TouchExplorer是“组态王”软件的核心部分和管理开发系统,是应用工程的开发环境,内嵌画面开发系统,可完成对画面的设计、动画的连接等工作。
TouchVew是“组态王”软件的实时运行环境,用于显示画面开发系统中建立的动画图形画面,并负责数据库与I/O服务程序的数据交换,通过实时数据库管理从一组工业控制对象采集到的各种数据,并把数据的变化用动画的方式形象地表示出来,同时完成报警、历史记录、趋势曲线等监视功能,并可生成历史数据文件。
在TouchExplorer的画面开发系统中设计开发的画面应用程序必须在TouchVew运行环境中才能运行。
3 S7-200系列PLC西门子公司的SIMATIC S7-200系列属于小型可编程序控制器,可用于代替继电器的简单控制场合,也可以用于复杂的自动化控制系统。
S7-200系列PLC共有5种基本型号的CPU模块,即CPU221、CPU222、CPU224、CPU226、CPU226XM,控制点数可以从10点扩展到248点。
其中,CPU221无扩展功能,适于用做小点数的微型控制器,CPU222有扩展功能,CPU224是具有较强控制功能的控制器,CPU226和CPU226 XM适用于复杂的中小型控制系统。
手把手教你如何使用西门子Step7软件组态S7-300 PLC通过PROFINET与ET200S从站通讯
S7-300 PROFINET IO 通讯快速入门1 PROF INE T IO概述PROFINET是一种用于工业自动化领域的创新、开放式以太网标准(IEC 61158)。
使用PROFINET,设备可以从现场级连接到管理级。
• PROFINET用于自动化的开放式工业以太网标准。
• PROFINET基于工业以太网。
• PROFINET采用TCP/IP和IT标准。
• PROFINET是一种实时以太网。
• PROFINET实现现场总线系统的无缝集成。
通过PROFINET,分布式现场设备(如现场IO设备,例如信号模板)可直接连接到工业以太网,与PLC等设备通讯。
并且可以达到与现场总线相同或更优越的响应时间,其典型的响应时间在10ms的数量级,完全满足现场级的使用。
在使用Step7 进行组态的过程中,这些现场设备(IO device, IO设备)制定由一个中央控制器(IO controller, IO控制器)。
借助于具有PROFINET的能力接口或代理服务器,现有的模板或设备仍可以继续使用,从而保护PROFIBUS用户的投资。
IO Supervisor(IO 监视设备)用于HM I和诊断。
在PROFINET的结构中,PROFINET IO是一个执行模块化,分布式应用的通讯概念。
PROFINET IO能让您从您所熟悉的PROFIBUS一样,创造出自动化的解决方案。
所以不管您组态PROFINET IO或PROFIBUS,在STEP7中有着相同的应用程序外观。
2 PROF INE T IO现场设备简介以下SIM A TIC产品用于PROFINET分布式设备:• IM151-3 PN作为IO设备直接连接ET200S的接口模块。
• CPU317-2DP/PN或CPU315-2DP/PN作为IO控制器的CPU模块,用于处理过程信号和直接将现场设备连接到工业以太网。
• IE/PB LINK PN IO将现有的PROFIBUS设备透明的连接到PROFINET的代理设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
124.0 to 127.7
PS 机架 2
IM
(接收)
64.0 to 67.7
68.0 to 70.7
72.0 to 75.7
76.0 to 79.7
80.0 to 83.7
84.0 to 87.7
88.0 to 91.7
92.0 to 95.7
PS 机架 1
IM
(接收)
32.0 to 35.7
36.0 to 39.7
参数分配
选择可分配参数模块的特性,例如:保持区、 循环时间和模拟输入等。
设定组态
设定好的硬件组态和参数分配。
实际组态
已存在硬件的实际组态和参数分配。
插入一个站
启动硬件组态编辑器
产生硬件设定组态
S7-300™模块编址
槽号 1 2 4 5 6 7 8 9 1M
SM
SM
20.0 to 23.7 9
24.0 to 27.7 10
28.0 to 31.7 11
2
3
模块地址概况
“Address Overview”
可变编址
2x
硬件组态: 编辑符号名, 监视/修改变量
CPU 属性:循环 / 时钟存储器
双击
时钟存储器位 频率 (Hz) 周期 (s)
7
6
5 1 1
4 1.25 0.8
3 2 0.5
2 2.5 0.4
1 5 0.2
0 10 0.1
0.5 0.62 2 1.6
保存硬件设定组态与下载到模块
下载 (只有CPU在 STOP 模式)
上载硬件实际组态到PG/PC
练习:上载硬件实际组态到PG/PC 并改名
结果
练习:匹配实际组态
练习: 从 “My_Program”拷贝块
硬件组态
目标
学习了本章之后,你将 ... ... ... ... ... 能够在项目中插入硬件站 能够生成硬件站的组态并赋值参数 能够读出硬件站的实际组态并赋值参数 熟悉S7-300™ 输入和输出模板的地址
硬件组态和参数分配
组态
在硬件组态的站窗口中分配机架、块和可分布式 I/O,可以从硬件目录中选择部件。
1.
2.
3.
练习:时钟存储器参数分配和测试
CPU 属性
2x
CPU 属性:概述
CPU 属性:启动
CPU 属性:保持存储器
仅当 CPU 没有后备电池
CPU 属性:保护
CPU 属性:诊断/时钟
CPU 属性: 通讯
40.0 to 43.7
44.0 to 47.7
48.0 to 51.7
52.0 to 55.7
56.0 to 59.7
60.0 to 63.7
PS 机架 0 槽 1
CPU
IM
(发送)
0.0 to 3.7 4
4.0 to 7.7 5
8.0 to 11.7 6
12.0 to 15.7 7
16.0 to 19.7 8
SM
SM
SM
SM
地址 0.0 地址 0.7 地址 1.0 地址 1.7
多行组态中DI/DO编址
机架 3 PS IM
(接收)
96.0 to 99.7
100.0 to 103.7
104.0 to 107.7
108.0 to 111.7
112.0 to 115.7
116.0 to 119.7
120.0 to 123.7