能量原理之结构力学版
合集下载
结构力学 能量法

2
2E
M (x) y
Iz
U
udV
V
A
l
1 2E
M 2(x)
I
2 z
y 2dAdx
U M 2 (x)dx
l 2EI z
4) 组合变形杆的应变能
Strain-energy of combined deformationed bars
M(x)
N(x) T(x)
U FN 2 (x)dx T 2 (x)dx M 2 (x)dx
机械能守恒 在等温绝热平衡的(缓慢的)加载过程中,外 力对弹性体所做的功全部转化为应变能
外力功 = 应变能
W=U
A
a
–√–2
P P
D Pa
B0 C P
例 图示桁架各杆件的 抗拉刚度均为 EA,求结 点 C 的竖向位移。
各杆应变能
U AD
P2a 2EA
P2a U DC 2EA
UBD (
2P)2 ( 2EA
U T 2 (x)dx M 2 (x)dx
l 2GI p
l 2EIz
U
( T 2 (x)dx
M 2 (x)dx )
n l 2GI p
l 2EIz
5) 杆件结构系统的应变能
Strain-energy of a bars system
A bars system , having some simple tension or compression bars and some beams . Its strain-energy can be attained as follows :
应变比能 (strain-energy density)
结构力学

结构动力学
结构动力学是研究工程结构在动载荷作用下的响应和性能的分支学科。动载荷是指随时间而改变的载荷。在 动载荷作用下,结构内部的应力、应变及位移也必然是时间的函数。由于涉及时间因素,结构动力学的研究内容 一般比结构静力学复杂的多。(见结构动力学)
结构稳定理论
结构稳定理论是研究工程结构稳定性的分支。现代工程中大量使用细长型和薄型结构,如细杆、薄板和薄壳。
结构力学
基础学科
01 简介
03 发展简史 05 研究方法
目录
02 工作任务 04 学科体系 06 能量法
结构力学是固体力学的一个分支,它主要研究工程结构受力和传力的规律,以及如何进行结构优化的学科, 它是土木工程专业和机械类专业学生必修的学科。结构力学研究的内容包括结构的组成规则,结构在各种效应 (外力,温度效应,施工误差及支座变形等)作用下的响应,包括内力(轴力,剪力,弯矩,扭矩)的计算,位 移(线位移,角位移)计算,以及结构在动力荷载作用下的动力响应(自振周期,振型)的计算等。结构力学通 常有三种分析的方法:能量法,力法,位移法,由位移法衍生出的矩阵位移法后来发展出有限元法,成为利用计 算机进行结构计算的理论基础。
能量法
结构力学中的能量原理以内部和外部力量的能量或作业的形式表达应力,应变或变形,位移,材料特性和外 部影响之间的关系。由于能量是一个标量,这些关系为固体力学中可变形体的控制方程提供了方便和可选的方法。 它们也可以用于获得相当复杂系统的近似解,绕过了解一组控制偏微分方程的困难任务。
感谢观看
简介
结构力学是一门古老的学科,又是一门迅速发展的学科。新型工程材料和新型工程结构的大量出现,向结构 力学提供了新的研究内容并提出新的要求。计算机的发展,又为结构力学提供了有力的计算工具。另一方面,结 构力学对数学及其他学科的发展也起了推动作用。有限元法这一数学方法的出现和发展就和结构力学的研究有密 切关系。在固体力学领域中,材料力学给结构力学提供了必要的基本知识,弹性力学和塑性力学是结构力学的理 论基础。另外,结构力学与流体力学相结合形成边缘学科——结构流体弹性力学。
结构动力学是研究工程结构在动载荷作用下的响应和性能的分支学科。动载荷是指随时间而改变的载荷。在 动载荷作用下,结构内部的应力、应变及位移也必然是时间的函数。由于涉及时间因素,结构动力学的研究内容 一般比结构静力学复杂的多。(见结构动力学)
结构稳定理论
结构稳定理论是研究工程结构稳定性的分支。现代工程中大量使用细长型和薄型结构,如细杆、薄板和薄壳。
结构力学
基础学科
01 简介
03 发展简史 05 研究方法
目录
02 工作任务 04 学科体系 06 能量法
结构力学是固体力学的一个分支,它主要研究工程结构受力和传力的规律,以及如何进行结构优化的学科, 它是土木工程专业和机械类专业学生必修的学科。结构力学研究的内容包括结构的组成规则,结构在各种效应 (外力,温度效应,施工误差及支座变形等)作用下的响应,包括内力(轴力,剪力,弯矩,扭矩)的计算,位 移(线位移,角位移)计算,以及结构在动力荷载作用下的动力响应(自振周期,振型)的计算等。结构力学通 常有三种分析的方法:能量法,力法,位移法,由位移法衍生出的矩阵位移法后来发展出有限元法,成为利用计 算机进行结构计算的理论基础。
能量法
结构力学中的能量原理以内部和外部力量的能量或作业的形式表达应力,应变或变形,位移,材料特性和外 部影响之间的关系。由于能量是一个标量,这些关系为固体力学中可变形体的控制方程提供了方便和可选的方法。 它们也可以用于获得相当复杂系统的近似解,绕过了解一组控制偏微分方程的困难任务。
感谢观看
简介
结构力学是一门古老的学科,又是一门迅速发展的学科。新型工程材料和新型工程结构的大量出现,向结构 力学提供了新的研究内容并提出新的要求。计算机的发展,又为结构力学提供了有力的计算工具。另一方面,结 构力学对数学及其他学科的发展也起了推动作用。有限元法这一数学方法的出现和发展就和结构力学的研究有密 切关系。在固体力学领域中,材料力学给结构力学提供了必要的基本知识,弹性力学和塑性力学是结构力学的理 论基础。另外,结构力学与流体力学相结合形成边缘学科——结构流体弹性力学。
第十三章 - 能量法.ppt-结构力学

三 利用功能原理计算位移
第十三章 能量法/三 利用功能原理计算位移
利用
U W
1 P 2
可以计算荷载作用点的位移,但是
只限于单一荷载作用,而且所求位移只是荷载作用点 (或作用面)沿着荷载作用方向与荷载相对应的位移。
第十三章 能量法/三 利用功能原理计算位移
例题 图示变截面受拉杆,E、A 为已知,求加力点C的水平位
第十三章 能量法/二 变形能
4 关于变形能计算的讨论
1 2 以上计算公式仅适用于线弹性材料在小变形下的变形能的计算。 变形能可以通过外力功计算,也可以通过杆件微段上的内力功
等于微段的变形能,然后积分求得整个杆件上的变形能。
3 变形能为内力(或外力)的二次函数,故叠加原理在变形能计算
中不能使用。只有当杆件上任一载荷在其他载荷引起的位移上不做功
P
CP
Pl 3 48 EI
BP
mo
Pl 2 16 EI
A
B
Bm
o
C
Cm
o
mol 2 16 EI
mol 3EI
L/2
L/2
B
Pl 2 16 EI
Pl 3 mo l 2 C 48EI 16 EI
mo l 3EI
第十三章 能量法 /一 外力功
解: (2)外力功的计算
FN L U W 2 EA
式中
2
FN
——轴力,
A ——截面面积
第十三章 能量法/二 变形能
由拉压杆件组成的杆系的变形能: 2 1 5 4 受力复杂杆(轴力沿杆的轴线变化)的变形能
x
P 3
2 n Pi 2 Li FNi Li U i 1 2 Ei Ai i 1 2 Ei Ai n
结构力学第13章 能量原理

超静定结构:多余约束截断处的位移要连续和协调, 超静定结构:多余约束截断处的位移要连续和协调,即:
i (ε , γ , κ ) = ∑ ∫ ( Mκ + FNε + FQγ )ds ∑ FRk ck = 0
——超静定结构可能位移存在的条件即变形协调条件 超静定结构可能位移存在的条件即变形协调条件 静定结构:没有多余约束,对任意给定的应变, 静定结构:没有多余约束,对任意给定的应变,满足位移边界 (联结 条件的可能位移总是存在的. 联结)条件的可能位移总是存在的 联结 条件的可能位移总是存在的.
vC = ε 0 FN + γ 0 FQ + κ 0 M + ∫ εdFN + ∫ γdFQ + ∫ κdM
0 0 0
FN0 +γ κ0 + κ
FN 0
vCn = ∫ (ε 0 + ε )dFN vCs = ∫ (γ 0 + γ )dFQ
0 FQ
FN
FQ
M
vCb = ∫ (κ 0 + κ )dM
§13-1 可能内力与可能位移
(2)杆端的静力边界条件:采用整体坐标 )杆端的静力边界条件:
杆件结构中: 杆件结构中: 杆端的静力边界条件为
Fx = FPx Fy = FPy Fθ = FPθ
方向为自由的杆端处) (在沿x方向为自由的杆端处) 在沿 方向为自由的杆端处 方向为自由的杆端处) (在沿y方向为自由的杆端处) 在沿 方向为自由的杆端处 方向为自由的杆端处) (在沿θ方向为自由的杆端处) 在沿 方向为自由的杆端处
6. 几何可能应变:对存在的几何可能位移进行微分而导出的应变. 几何可能应变:对存在的几何可能位移进行微分而导出的应变.
龙驭球《结构力学Ⅱ》配套题库-章节题库(能量原理)【圣才出品】
第13章能量原理
一、判断题
1.用能量法计算无限自由度体系的临界荷载,所得计算结果均不小于精确解。
()【答案】对
二、综合分析题
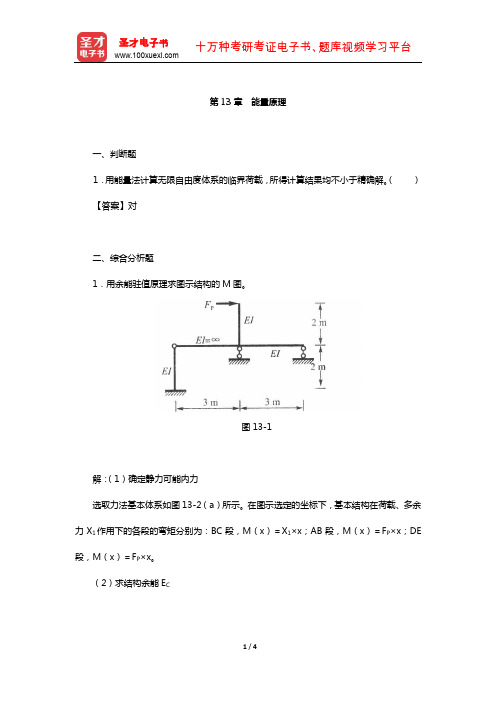
1.用余能驻值原理求图示结构的M图。
图13-1
解:(1)确定静力可能内力
选取力法基本体系如图13-2(a)所示。
在图示选定的坐标下,基本结构在荷载、多余力X1作用下的各段的弯矩分别为:BC段,M(x)=X1×x;AB段,M(x)=F P×x;DE 段,M(x)=F P×x。
(2)求结构余能E C
(3)应用余能驻值条件即9X1+0=0;由此求得X1=0.
(4)求内力
该结构的M图如图13-2(b)所示。
图13-2
2.图13-3所示超静定结构,各杆的抗拉(压)刚度EA相同,材料的线膨胀系数均为α。
设杆1在制造时长了δ,装配成结构以后,各杆温度又同时上升了t℃,试应用势能驻值原理求各杆的轴力。
图13-3
解:(1)确定几何可能位移
如图13-4所示,设A点的竖向位移为△,则AB、AD杆的伸长均为,从而可得
AC、AB、AD杆的应变为
图13-4
其中ε1由三部分构成,ε2、ε3由两部分构成如下:
可以求得
可以求得
(2)求结构的势能
结构的应变能为各杆的拉伸应变能之和
结构的荷载势能为:V P=0 结构的势能为
(3)应用势能驻值原理
由此求得:
(4)求内力。
结构力学-课件
6.6 对称结构
7.渐进法
8.设计实例简单分析
1.虚功原理
2.影响线:
2.1 静力法做影响线
2.2 机动法做影响线
2.3 影响线的应用
3.简支梁的包络图和绝对最大弯矩
4.应用虚力原理求刚体体系的位移
4.1 概念介绍
4.2 荷载作用下的位移计算举例
4.3 图乘法
5.力法求解超静定结构
5.1 超静定结构的组成和超静定次数
5.2 力法的基本思路
5.3 对称结构
5.4 支座移动时的位移计算:
6.位移法求解超静定结构
6.1 基本概念
6.2 等ห้องสมุดไป่ตู้面杆件的刚度方程(形常数、载常数)
6.3 无侧移刚架的计算
6.4.有侧移刚架的计算
6.5 位移法的基本体系
结构力学之能量原理

γ
dv =0, ϕ =− , 则 dx
(12-12) )
2 2 du 2 d v 1 U = ∫ u1 dx = ∫ EA + EI ⋅ 2 dx dx 2 dx
定义:单位杆长上的应变余能为杆件的应变余能密度, 定义:单位杆长上的应变余能为杆件的应变余能密度, 表示。 用u*1表示。 当杆件同时承受拉伸、剪切和弯曲时, 当杆件同时承受拉伸、剪切和弯曲时,其杆件的应 变余能密度为
′ EI ⋅ vi′′⋅ v ′′dx Z j + ∑ ∫ EI ⋅ vi′′⋅ v′p dx − ∑ Fp ∆ i = 0 或 ∑∑ ∫ j e p j =1 e
n
因为, 时的基本结构的内力( 因为, ⋅ vi′′ = − M i 为Zi=1时的基本结构的内力(弯矩), 时的基本结构的内力 弯矩), EI
(12-3) )
根据应变余能密度的定义, 应变余能密度 根据应变余能密度的定义,则应变余能密度u*N为
U* 1 * uN = = ∫δ ⋅ dFN = ∫ε ⋅ dσ V A⋅ dx
(12-4) )
即应力∼ 应变曲线中OAC所围的面积。 所围的面积。 即应力∼ 应变曲线中 所围的面积
dσ
σ
C
A B
O
结构力学
第12章 能量原理
主要内容
1 杆件的应变能及应变余能计算 2 结构势能定义及势能原理 3 结构余能定义及余能原理
能量的概念大家早已了解, 能量的概念大家早已了解,在第六章分析静定结构 的位移计算中,曾介绍了虚功方程的两种应用: 的位移计算中,曾介绍了虚功方程的两种应用:虚设单 位力求位移和虚设单位位移求未知力。 位力求位移和虚设单位位移求未知力。在本章中将介绍 基于能量原理基础上的解题方法。 基于能量原理基础上的解题方法。
结构力学(虚功原理和结构位移计算)ppt课件
A
i
δij
j Pj=1
B
δjj
δjj --直接柔度 δij --间接柔度
δjj >0
>0 δij <0
=0
完整版课件
9
5、计算位移的有关假定
1)、结构材料服从“虎克定律”,即应力、应变成线形关系。
2)、小变形假设。变形前后荷载作用位置不变。
3)、结构各部分之间为理想联结,不计摩擦阻力。
4)、当杆件同时承受轴力与横向力作用时, 不考虑由于杆弯曲 所引起的杆端轴力对弯矩及弯曲变形的影响。
由平衡条件知:
A
R1
b 未知力与已知力 a 之间的几何方程
由虚功方程:
R1
C
a
b
图(a)
C
图(b)
Δ1c1ab0
即
完整版课件
Δ
c1
•
b a
B
B' P=1 B
14
应用虚力原理求未知位移的关键是沿拟求位移Δ方向虚设单 位荷载,并利用平衡条件求与已知位移c1对应的支反力 R1 这种解法称为单位荷载法。
特点:利用静力平衡,通过虚功方程来解几何问题。 适用范围: 刚体体系的位移计算,
若求桁架中AB杆的角位移,应加 一单位力偶,构成这一力偶的两个 集中力的值取 1/d。作用于杆端 且垂直于杆(d 为杆长)。
完整版课件
32
3) 若要求结构上两点(A、B)沿其连线的相对位移,可在 该两点沿其连线加上两个方向相反的单位力。
完整版课件
33
4) 若求梁或刚架上两个截面的相对角位移,可在两个截 面上加两个方向相反的单位力偶。
当静力加载时,即:
P
P由0增加至P
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F1 F2 如果将F1+F2视为 一个力,应为
V
F F l V V
1 2 2 1 2 2
3.直接“叠加”
2 EA
F 1 F 2 l
2
2 EA
4.先加F1
2 F 1 1 l V 1 F 1 1 2 2 EA
F2从零开 始,缓慢 加载
F1+F2
A
PA
FP C PC FP C
B
ml m C 16EI
mA
ml 3EI
A
mA
B
mC
1 V F m 2 P mC mA 2
m
2 3 2 2 F l F ml 1 m l P P V V V 1 2 EI 96 16 6
2 2 F F l N V dx 2EA 2EA l
F
2 2 F F l V v Al dv 2 2 EA 2 EA V
1 1F F v 2 2 AEA
应变能密度和余能密度
1
功和余功 F1
F
dv d
d
1
d
1
dW F d
2 N 2 x 2
FQ2
为什么此时可以叠加?
A
Δ
B
例1.计算图示杆中的应变能(EA已知) 解: 1.用定义计算
2 F x N dV dx 2 EA
F1
l l
F2
2 F F F 2 1 2 V dx dx 2 EA 0 2 EA 0 l l 2
2 F F F l 2l 1 2 2 EA 2 EA 2
注意:力作用处的挠度或转角一般 未知,故基本方法是用内力计算。
2 2 2 F M M N x V dx dx dx 2 EA l 2 GI 2 EI P z l l
A m
FP C B
§2* 余功、应变余能
一、功和余功
F1 F1
F
dF
F
1
1
d
dW F d
对于线性弹性问题
1
余能 应变能ቤተ መጻሕፍቲ ባይዱ
v vC
dv d E d
1
dv d C
v C d
0
v d E d
0 0
1
1
1
1
d E 0
1 2 1 E 1 1 1 2 2
2 1 1 1 11 2E 2
l/2
l 23 2 2 2 2 F l F m l 1 m l M x M x P P 1 2 V dx dx EI 96 16 6 2 EI 2 EI 0 l/2
2.先加FP,再加m
PC FP l 48EI
2
3
1 V 1 F PPC 2
dW dF c
W
1
Fd
0
WC
F1
dF
0
对于线性弹性问题
F1
余功
W W C
功
1
二、应变能密度和余能密度
1
一、功和余功 F1
F
dv d
d
1
dW F d
F1
1
d
d
1
1
dF
F
1
dv d C
dW dF c
能量原理
§1 概述
缓慢加载,无热耗,弹性阶段 (不必线性弹性)——外力功全部转 化为应变能(变形能)。
§2 弹性体应变能
一、杆在基本变形下的应变能
1.轴向拉压
FN(x) dx
2 1 F x N x d l dx 微线段应变能: dV F N 2 2 EA
FN(x+dx)
2 1 M dV d dx M 2 2 EI z
d
M
二、应变能的叠加 1.计算应变能时,一般不能“直接”叠加 例: 1.只加F1
l
E、A、l
F1+F2
2 2 F dx F 1 1 1 l V F 1 1 1 2 EA 2 EA 2 0
2.只加F2
2 F 1 2 l V 2 F 2 2 2 2 EA
2 2 2 F M M 用此式计算的是储存在杆 N x V dx dx dx 件整体内部的总应变能 2 EA 2 GI 2 EI P z l l l
v d
0
1
1 1 1 2
线性弹性问题
用此式计算的是单向应力状态下储存在单位 体积内部的应变能(应变能密度或比能)。
杆中应变能:
2 F x N V dV dx 2 EA l l
1.轴向拉压
2.圆轴扭转 3.弯曲
2 1 F x N dV x d l dx F N 2 2 EA
2 1 M x dV M d dx x 2 2 GI P
2 F F F l 2l 1 2 V 2 EA 2 EA 2
F1
l l
F2
2.先加F2,然后加F1(用外力功)
2 l 1 * 1 F 2 V 1 F 2 2 F 2 2 2 EA
F2
l F l 1 * * 1 F 1 1 V F F F F 2 1 1 2 1 1 2 2 2 EA EA
F1
l l
F2
V V V 1 2
例2.计算图示梁中的应变能(EI已知)
解:
1.按定义计算
M2 V dx 2EI l
0 xl /2 l /2 xl
A m
FP C B
m F P m x 2 l x M m F P l x 2 l
5.再加F2
1 V F22 F 12 2 2 F F 2 l 1F 2l 2EA EA
* 2
1 2
F1 F2
F1
6. 叠加
2 F F l 1 2 V
加F2时,F1已经作用在杆上, 对变形Δ 2作功。
2 EA
2.组合变形时的应变能:
F M M dx V dx dx dx 2 EA l 2 GI 2 EI 2GA P z l l l