机械系统动力学答案2011版啊
合肥工业大学机械动力学基础试题(含部分答案)
②由动能定理可知: E = m1 x12
1 2
其中 x1 a , x2 b , 为杆转过的角度. J eq m1a 2 m2b2 再求等效刚度, keq x 2
1 2
1 2 1 2 2 kx2 kb keq kb2 2 2
④推导出用单元节点位移表示的单元应变、单元应力表达式,再利用虚功方程建立单元节 点力阵与节点位移列阵之间的关系,形成单元的刚度方程式。 ⑤根据系统的动能与势能,得到各单元的刚度矩阵和质量矩阵。 ⑥考虑整体结构的约束情况,修正整体刚度方程,求解单元节点的运动方程。 ⑦由单元节点的运动方程“装配”成为全系统的运动方程。 (6)简述机械系统的三要素及动力学模型。 (2012) 答:三要素:惯性、弹性、阻尼. 动力学模型:①集中参数模型,由惯性元件、弹性元件和阻尼元件等离散元件组成;②有 限单元模型,由有限个离散单元组成,每个单元则是连续的;③连续弹性体模型将实际结 构简化成质量和刚度均匀分布或按简单规律分布的弹性体. 3. 试求图示振动系统的运动微分方程和固有频率。 (图 3、图 5 作纯滚动)
不作用外载荷时的力矩平衡可列为: ∴系统固有频率为:
M J
eq
keq 0
keq J eq
kb 2 . m1a 2 m2b 2
③由于 m作纯滚动,则运动微分方程可表示为: J kx r 0 ,其中 J 为 m相对于接地 点的转动惯量, J
kk mx kx 0 ,即: mx 1 2 k3 cos 2 x 0 k1 k2
∴系统固有频率为:n
k m
k1k2 k3 cos 2 k k k (k k 2 ) cos 2 k1 k 2 . = 1 2 3 1 m m(k1 k 2 )
第11章机械系统动力学

第十一章机械系统动力学11-1填充题(1) _____________________________ 机器速度波动的类型有______________________________ 和两种。
前者一般采用的调节方法是_______ ,后者一般采用的调节方法是_________ 。
(2)用飞轮进行调速时,若苴它条件不变,则要求的速度不均匀系数越小,飞轮的转动惯量将越—。
在满足同样的速度不均匀系数条件下,为了减小飞轮的转动惯量,应将飞轮安装在___________ 轴上。
(3)___________________________________________________ 最大盈亏功是指机械系统在一个运动循环中的与 _________________________________________________ 之差的最大值。
(4) ____________________________________________________________________________ 某机械主轴实际转速在其平均转速的±3%范围内变化,则其速度不均匀系数忌___________________________ 。
(5)某机器的主轴平均角速度^lOOrad/s,机器运转的速度不均匀系数飪0.05,则该机器的最大角速度如《等于_______ r ad/s,最小角速度轴加等于 ________ rad/s。
11-2选择题(1)_______________________________________________________________________________________ 在周期性速度波动中,一个周期内等效驱动力做功瞅1与等效阻力做功M的疑值关系是__________________A.Wd>Wr;B.恥<昭;C. WWr:D.肌=%(2)在机械系统的启动阶段,系统的动能______ ,并且 _____ 。
第11章 机械系统动力学
l ——外力矩M L作用构件的角速度;
u xp、u yp、ul ——相应类速度。
3. 动力学方程
在不考虑系统势能变化的情况下(对于刚体机械系统,一般情 况下,构件重量产生的势能 构件动能,可以略去),将 E 1 J e1q12微分,得 2 E J e1q1 q
E 1 2 dJ e1 q1 q1 2 d q1
凯思方程:
是将主动力和惯性力都转化到广义坐标中,它们在广义
坐标中也同样应用达朗贝尔原理,表达式为:
( r ) M *(r ) FP Fm 0
P P 1 m 1
M个惯性力对第r个广义坐标的广义惯性力之和
P个主动力对第r个广义坐标的广义力之和
11-2 刚性机械系统动力学
系统的简化:
1. 系统的动能: 设系统有m个活动构件,则系统的总动能E:
1 m 2 2 E mi xsi ysi J sii2 2 i 1
“.”表示对时间的导数
由于xsi、ysi、i 都是广义坐标q1的函数,即 xsi xsi (q1 ) ysi ysi (q1 ) (q ) i 1 i 所以
H 13
(2)求等效转动惯量J e 根据动能等效原则,得:
1 1 2 2 2 J e12 J112 J 22 J H H m2vO2 2 2
2 2
2
vO2 2 H Je J 1 J2 J H m2 1 1 1 2 H 2 z3 2 H 由i23 1 3 2 3 H H z2 H 1 2 H 1 1 2 又 1 4
机械系统动力学
t
J
0
M()
t0
当 M ()ab 时,可解出t的值
t
t0
Jln ab b ab0
第十四章 机械系统动力学
HIGH EDUCATION PRESS
3.等效转动惯量是常数、等效力矩为等效构件速度函数的运动 方程的求解
将 d d 代入 dt d
J d M()
dt
得:Jdd M()
d J d M()
第十四章 机械系统动力学
HIGH EDUCATION PRESS
三、等效参量的计算
1. 作定轴转动的等效构件的等效参量的计算 2. 作直线移动的等效构件的等效参量的计算
第十四章 机械系统动力学
HIGH EDUCATION PRESS
1.作定轴转动的等效构件的等效参量的计算
等效转动惯量的计算:
动能:
1
A
Mi2 Fi2 G2
CF
曲柄压力机的受力分析
第十四章 机械系统动力学
HIGH EDUCATION PRESS
二、等效构件
名词术语: 1. 等效转动惯量 2. 等效质量 3. 等效力矩 4. 等效力
第十四章 机械系统动力学
HIGH EDUCATION PRESS
二、等效构件
等效构件示意图
第十四章 机械系统动力学
第十四章 机械系统动力学
HIGH EDUCATION PRESS
2.作用在机械上的驱动力
(1)驱动力为常量 (2)驱动力是位移的函数 (3)驱动力是速度的函数
第十四章 机械系统动力学
HIGH EDUCATION PRESS
解析法研究异步电动机驱动力矩特性
M
d
0 tan
作业(二)答案:单自由度机械系统动力学等效转动惯量等效力矩
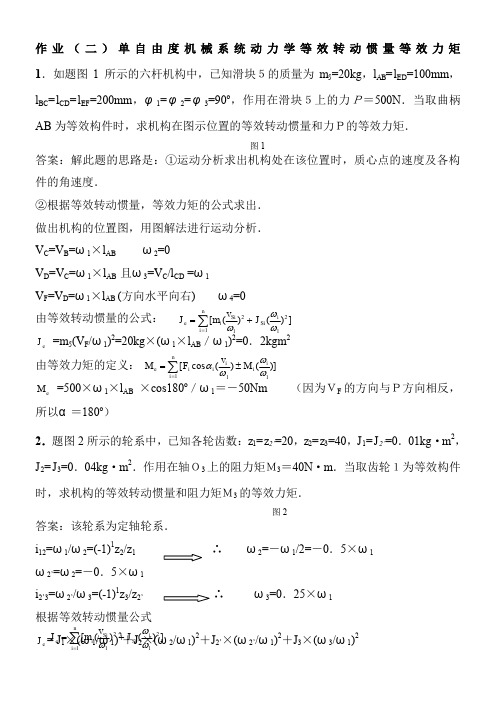
作业(二)单自由度机械系统动力学等效转动惯量等效力矩1.如题图1所示的六杆机构中,已知滑块5的质量为m 5=20kg ,l AB =l ED =100mm ,l BC =l CD =l EF =200mm ,φ1=φ2=φ3=90o ,作用在滑块5上的力P=500N .当取曲柄AB 为等效构件时,求机构在图示位置的等效转动惯量和力P的等效力矩.图1答案:解此题的思路是:①运动分析求出机构处在该位置时,质心点的速度及各构件的角速度.②根据等效转动惯量,等效力矩的公式求出.做出机构的位置图,用图解法进行运动分析.V C =V B =ω1×l AB ω2=0V D =V C =ω1×l AB 且ω3=V C /l CD =ω1V F =V D =ω1×l AB (方向水平向右) ω4=0由等效转动惯量的公式:e J =m 5(V F /ω1)2=20kg ×(ω1×l AB /ω1)2=0.2kgm 2由等效力矩的定义: e M =500×ω1×l AB ×cos180o/ω1=-50Nm (因为VF 的方向与P方向相反,所以α=180o )2.题图2所示的轮系中,已知各轮齿数:z 1=z 2’=20,z 2=z 3=40,J 1=J 2’=0.01kg ·m 2,J 2=J 3=0.04kg ·m 2.作用在轴O3上的阻力矩M3=40N ·m .当取齿轮1为等效构件时,求机构的等效转动惯量和阻力矩M3的等效力矩.图2答案:该轮系为定轴轮系.i 12=ω1/ω2=(-1)1z 2/z 1∴ ω2=-ω1/2=-0.5×ω1ω2’=ω2=-0.5×ω1i 2’3=ω2’/ω3=(-1)1z 3/z 2’ ∴ ω3=0.25×ω1根据等效转动惯量公式e J = J 1×(ω1/ω1)2+J 2×(ω2/ω1)2+J 2’×(ω2’/ω1)2+J 3×(ω3/ω1)2 ∑=+=n i i Si Si i e J v m J 12121]()([ωωω∑=±=n i i i i i i e M v F M 111)]()(cos [ωωωα∑=+=n i i Si Si i e J v m J 12121]()([ωωω=J 1+J 2/4+J 2’/4 +J 3/16=0.01+0.04/4+0.01/4+0.04/16=0.025 kg ·m 2根据等效力矩的公式: e M =M 3×ω3/ω1=40×0.25ω1/ω1=10N ·m3.在题图3所示减速器中,已知各轮的齿数:z 1=z 3=25,z 2=z 4=50,各轮的转动惯量J 1=J 3=0.04kg ·m 2,J 2=J 4=0.16kg ·m 2,(忽略各轴的转动惯量),作用在轴Ⅲ上的阻力矩M 3=100N ·m .试求选取轴Ⅰ为等效构件时,该机构的等效转动惯量J 和M 3的等效阻力矩M r .图3答案:i 12=ω1/ω2=z 2/z 1 ω2=ω1/2 ω3=ω2=ω1/2 i 34=ω3/ω4=z 4/z 3ω4=ω1/4等效转动惯量:J=J 1(ω1/ω1)2+J 2(ω2/ω1)2+J 3(ω3/ω1)2+J 4(ω4/ω1)2=0.042+0.16×(1/2)2+0.04×(1/2)2+0.16×(1/4)2=0.04+0.04+0.01+0.01=0.1 kg ·m 2等效阻力矩:M r =M 3×ω4/ω1=100/4=25(N ·m)4.题图4所示为一简易机床的主传动系统,由一级带传动和两级齿轮传动组成.已知直流电动机的转速n 0=1500r/min ,小带轮直径d =100mm ,转动惯量J d =0.1kg ·m 2,大带轮直径D =200mm ,转动惯量J D =0.3kg ·m 2.各齿轮的齿数和转动惯量分别为:z 1=32,J 1=0.1kg ·m 2,z 2=56,J 2=0.2kg ·m 2,z 2’=32,J 2’=0.4kg ·m 2,z 3=56,J 3=0.25kg ·m 2. 要求在切断电源后2秒,利用装在轴上的制动器将整个传动系统制动住.求所需的制动力矩M 1.图4∑=±=n i i i i i i e M v F M 111()(cos [ωωωα答案:电机的转速n0=1500r/min其角速度ω0=2π×1500/60=50π(rad/s)三根轴的转速分别为:ω1=d×ω0/D=25π(rad/s)ω2=z1×ω1/z2=32×25π/56=1429π(rad/s)ω3=z2’×ω2/z3=32×1429π/56=816π(rad/s)轴的等效转动惯量:J V=J d×(ω0/ω1)2+J D×(ω1/ω1)2+J1×(ω1/ω1)2+J2×(ω2/ω1)2+ J2’×(ω2/ω1)2+ J3×(ω3/ω1)2∴J V=0.1×(50π/25π)2+0.3×12+0.1×12+(0.2+0.1)×(14.29π/25π)2+0.25×(8.16π/25π)2=0.4+0.4+0.098+0.027=0.925 (kg·m2)轴制动前的初始角速度ω1=25π,制动阶段做减速运动,即可求出制动时的角加速度∴ωt=ω0-εt即0=25π-2εε=12.5π则在2秒内制动,其制动力矩M为:M=J V×ε=0.925×12.5=36.31 (kg·m)5.在题图5所示定轴轮系中,已知各轮齿数为:z1=z2’=20,z2=z3=40;各轮对其轮心的转动惯量分别为J1=J2’=0.01kg·m2,J2=J3=0.04kg·m2;作用在轮1上的驱动力矩M d=60N·m,作用在轮3上的阻力矩M r=120N·m.设该轮系原来静止,试求在M d和M r作用下,运转到t=15s时,轮1的角速度ω1和角加速度α1.图5答案:i12=ω1/ω2=(-1)1×z2/z1 ω2=-ω1/2i13=ω1/ω3=(-1)2×z2×z3/z1×z2’ω3=20×20×ω1/40×40=ω1/4轮1的等效力矩M为:M=M d×ω1/ω1+M r×ω3/ω1 =60×1-120/4=30 N·m轮1的等效转动惯量J为:J=J1(ω1/ω1)2+(J2’+J2)(ω2/ω1)2+J3(ω3/ω1)2=0.01×1+(0.01+0.04)/4+0.04/16=0.025 (kg·m2)∵M=J ×ε∴角加速度ε=M/J=1200 (rad/s2)初始角速度ω0=0 ∴ω1=ω0+ε×tω=1200×1.5=1800(rad/s)。
机械系统动力学答案2011版啊

机械系统动力学2011版1.如图所示的扭转摆,弹簧杆的刚度系数为K,圆盘的转动惯量为J,试求系统的固有圆频率。
(15分)图1解:如图建立坐标系设定坐标轴Z与摆线重合,初始时在重力作用下平衡,给圆盘一个相对于Z 轴的微小扭转角Ф,使之做自由扭转震动,该系统的扭转振动的微分方程为:将上式化简后得:系统的固有频率:2.系统如图所示,其滑轮质量为M。
忽略绳的弹性和M的转动(只考虑M 的上下振动),试利用能量法确定系统的固有频率。
(15分)机械系统动力学2011版图2解:如图建立坐标系:方法一:通过微分方程求出固有频率 物体平衡时,弹簧变形为:以物体平衡位置为原点,建立图示X 坐标系,物块分力如图所示,其运动微分方程:对于m 物块对于M 物块整理可得:系统的固有频率:方法二:利用能量法确定系统的固有频率 以系统平衡时重物的位置为原点。
δ x机械系统动力学2011版系统的动能系统的势能由于d(U+T)/dt=0所以可得:其中可得系统的固有频率:或可表示为:设系统运动方程为若以平衡位置为势能零点,则系统势能系统的动能由于机械能守恒定律,即T+U=常数,则得可得系统的固有频率:3. 某振动系统如图3所示,试用拉个朗日法写出系统的动能、势能和能量散失函数。
(10分)图3机械系统动力学2011版系统有两个质量块,设各质量块的位移x 1(t), x 2(t)为广义坐标,并设x 1(t)>x 2(t),系统地动能为系统的势能4. 图4所示的系统,物体质量为1m ,滑轮质量为2m ,半径为R ,试求系统的振动微分方程。
(15分)图4以平衡位置为坐标原点,设小车偏离平衡位置x ,弹簧K1对小车力为F K1,弹簧K2 对滑轮力为F K2,小车对滑轮的力为F 12,滑轮对小车的反作用力为F 21 对于小车可列微分方程对于滑块可列微分方程其中整理方程组可得系统振动微分方程:方法二: 利用能量法确定系统的振动微分方程机械系统动力学2011版以系统平衡时重物的位置为原点, 设小车偏离平衡位置x ,滑轮偏转 系统的动能系统的势能由于d(U+T)/dt=0 所以可得:整理方程组可得系统振动微分方程:5. 如图5所示的单摆,其质量为m ,摆杆是无质量的刚性杆,长为l 。
机械系统动力学 第三章 机械系统运动微分方程的求解2
3-3机械系统的运动方程求解方法-半解析数值法
解: 2)求 与 t之间的关系
图3-3-9 等效力矩与时间的关系 图3-3-8 等效转动惯量的导数的变化规律
3-3机械系统的运动方程求解方法-半解析数值法
图3-3-10 曲柄角速度与时间的关系
3-3机械系统的运动方程求解方法-半解析数值法
二、等效力矩是等效构件和角速度的函数 Me Me ,
3-2机械系统的运动方程求解方法-数值法
3-2-1 欧拉法
对于常微分方程的定解问题,形如
y f (x, y)
y(x0 )
y0
3-2-1
所谓数值解法, 就是寻求解 y(x) 在一系列离散节点
x1 x2 xn xn1 上的近似值 y1, y2 , , yn , yn1 。
相邻两个节点的间距 hn xn1 xn
一、等效力矩是等效构件转角的函数时,即 M e M e
对上式积分:
ห้องสมุดไป่ตู้ 1
2
J e
2
1 2
J e0 02
0
Me
d
W
J e0 0 2 2W Je
3-3机械系统的运动方程求解方法-半解析数值法
由 d dt d
dt
t t0
d 0
例3-3-1:对于3-2-1所示的偏置曲柄滑块机构,若已
2!
3! t
3-2机械系统的运动方程求解方法-数值法
3-2-2 Newmark- 法
x(t t) x(t) x(t)t x(t) t2 x (t) t3 o(t4)
2!
3!
线性加速度法的迭代公式 1
大致具有3阶精度,将上式的最后一项中
即为Newmark- 法。其迭代公式为
机械系统设计习题(有答案版)
第一章绪论1、系统:具有特定功能的、相互间具有一定联系的许多要素构成的一个整体,即由两个或两个以上的要素组成的具有一定结构和特定功能的整体都是系统。
2、机械系统的组成:1、动力系统。
2、执行系统。
3、传动系统。
4、操纵、控制系统。
5、支承系统。
6、润滑、冷却与密封系统。
3、产品设计类型:完全创新设计、适应性设计、变异性设计。
4、机械系统的设计要求:功能、适应性、可靠性、生产能力、使用经济性、成本六方面的要求。
5、产品的产生过程分哪几个阶段?产品策划---产品设计---产品生产---产品运转---产品报废或回收。
6、产品的设计过程分哪几个阶段?功能原理方案设计阶段---结构总体设计阶段---技术设计阶段第二章机械系统总体设计1、功能原理方案设计步骤设计任务-求总功能-总共能分解-寻求子功能解-原理解功能-评价与决策-最佳原理方案2、什么是“黑箱法”:根据系统的某种输入及要求获得某种输出的功能要求,从中寻找出某种物理效应或原理来实现输入-输出之间的转换,得到相应的解决方法,从而推求出“黑箱”的功能结构,使“黑箱”逐渐变成“灰箱”、“白箱”的一种方法。
3、功能元、功能结构功能元:在一个系统中,总功能可以分解为一些分功能,其中可以分解到最低层次的分功能,并且分解到最后不能再分解的基本功能单位叫做功能元。
功能结构:将总功能分解为分功能,并相应找出实现各分功能的原理方案,从而简化了实现总功能的原理构思。
反之,同一层次的功能单位组合起来,应能满足上一层次功能的要求,最后组合成的整体应能满足总功能的要求。
这种功能的分解和组合关系称为功能结构。
4、机械系统总体参数包括哪些性能参数、结构参数、尺寸参数、运动参数、动力参数。
5、七个标准公比为:1.06、1.12、1.26、1.41、1.58、1.78和2。
6、公比φ、变速范围R n与级数Z间的关系。
Z=lgRn/lgφ+1第三章执行系统设计1、执行系统的组成:由执行末端和与之相连的执行机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图1
解:如图建立坐标系
设定坐标轴Z与摆线重合,初始时在重力作用下平衡,给圆盘一个相对于Z轴的微小扭转角Ф,使之做自由扭转震动,该系统的扭转振动的微分方程为:
将上式化简后得:
系统的固有频率:
2.系统如图所示,其滑轮质量为M。忽略绳的弹性和M的转动(只考虑M的上下振动),试利用能量法确定系统的固有频率。(15分)
方法二:利用能量法确定系统的振动微分方程
以系统平衡时重物的位置为原点,设小车偏离平衡位置x,滑轮偏转
系统的动能
系统的势能
由于d(U+T)/dt=0
所以可得:
整理方程组可得系统振动微分方程:
5.如图5所示的单摆,其质量为m,摆杆是无质量的刚性杆,长为l。它在粘性阻尼系数为r的液体中摆动,悬挂点O的运动为 。试写出单摆微幅摆动的微分方程式。(15分)
图5
根据动力学方程可得:
整理可得动力学方程
6.如图6所示的提升机,通过刚度系数 的钢丝绳和天轮(定滑轮)提升货载。货载重量 ,以 的速度等速下降。求提升机突然制动时的钢丝绳最大张力。(15分)
解:物体等速度下降时,弹簧的变形为
以平衡点为原点建立x坐标,建立其微分方程是
代入化简后可得
系统的固有频率
当重物突然停止时刻,取时间t=0,作为振动的起点。则运动的初始条件为:
图2
解:如图建立坐标系:
方法一:通过微分方程求出固有频率
物体平衡时,弹簧变形为:
以物体平衡位置为原点,建立图示X坐标系,物块分力如图所示,其运动微分方程:
对于m固有频率:
方法二:利用能量法确定系统的固有频率
以系统平衡时重物的位置为原点。
系统的动能
系统的势能
由于d(U+T)/dt=0
两边积分有
上式中,左端第一项表示质量m的瞬时动能,左端第二项表示弹簧相对静平衡位置的瞬时位能,方程的右边表示系统的总能量,方程表示能量守恒
设弹簧ξ段的动能为:
整根弹簧的动能
因为 ,
所以
当t=0时,瞬时速度为最大
初位移
初始速度
代入公式可得起振幅及初相位
则物体的运动方程
其最大张力 =294 186N
7.质量弹簧系统如图所示,其质量 的振动方程为 ( )。弹簧单位长度质量为 、长度 ,振动圆频率 ,最大振幅 。试推导出弹簧的最大动能公式并根据以上数值求出 。(15分)
图7
解:单自由度系统的自由振动方程为
在上诉方程的两边x'(t)得
所以可得:
其中
可得系统的固有频率:
或可表示为:
设系统运动方程为
若以平衡位置为势能零点,则系统势能
系统的动能
由于机械能守恒定律,即T+U=常数,则
得
可得系统的固有频率:
3.某振动系统如图3所示,试用拉个朗日法写出系统的动能、势能和能量散失函数。(10分)
图3
系统有两个质量块,设各质量块的位移x1(t),x2(t)为广义坐标,并设x1(t)>x2(t),系统地动能为
系统的势能
4.图4所示的系统,物体质量为 ,滑轮质量为 ,半径为 ,试求系统的振动微分方程。(15分)
图4
以平衡位置为坐标原点,设小车偏离平衡位置x,弹簧K1对小车力为FK1,弹簧K2
对滑轮力为FK2,小车对滑轮的力为F12,滑轮对小车的反作用力为F21
对于小车可列微分方程
对于滑块可列微分方程
其中
整理方程组可得系统振动微分方程: