机械系统动力学-第1、2讲-作业
机械系统动力学作业---平面二自由度机械臂运动学分析资料讲解
机械系统动力学作业---平面二自由度机械臂运动学分析平面二自由度机械臂动力学分析[摘要]机器臂是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。
本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。
经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。
[关键字]平面二自由度机械臂动力学拉格朗日方程一、介绍机器人是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。
机器人动力学问题有两类:■ ■■(1)给出已知的轨迹点上的■J- ■■■■■■,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q。
这对实现机器人动态控制是相当有用的。
(2)已知关节驱动力矩,求机器人系统相应的各瞬时的运动。
也就是说,给出关节力矩■ ■■向量T求机器人所产生的运动風&及&。
这对模拟机器人的运动是非常有用的。
二、二自由度机器臂动力学方程的推导过程机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。
机器人动力学方程的具体推导过程如下:(1)选取坐标系,选定完全而且独立的广义关节变量O r , r=l, 2,…,n。
(2)选定相应关节上的广义力F r :当O r是位移变量时,F r为力;当O r是角度变量时, F r为力矩。
(3)求出机器人各构件的动能和势能,构造拉格朗日函数。
(4)代入拉格朗日方程求得机器人系统的动力学方程。
下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
1平更二自由度机械臂1、分别求出两杆的动能和势能设齐、B 2是广义坐标,Q i、Q2是广义力。
两个杆的动能和势能分别为:式中,’是杆1质心C i.,\ )的速度向量,\是杆2质心C i ( ' , J )的速度向量。
第11章 机械系统动力学
l ——外力矩M L作用构件的角速度;
u xp、u yp、ul ——相应类速度。
3. 动力学方程
在不考虑系统势能变化的情况下(对于刚体机械系统,一般情 况下,构件重量产生的势能 构件动能,可以略去),将 E 1 J e1q12微分,得 2 E J e1q1 q
E 1 2 dJ e1 q1 q1 2 d q1
凯思方程:
是将主动力和惯性力都转化到广义坐标中,它们在广义
坐标中也同样应用达朗贝尔原理,表达式为:
( r ) M *(r ) FP Fm 0
P P 1 m 1
M个惯性力对第r个广义坐标的广义惯性力之和
P个主动力对第r个广义坐标的广义力之和
11-2 刚性机械系统动力学
系统的简化:
1. 系统的动能: 设系统有m个活动构件,则系统的总动能E:
1 m 2 2 E mi xsi ysi J sii2 2 i 1
“.”表示对时间的导数
由于xsi、ysi、i 都是广义坐标q1的函数,即 xsi xsi (q1 ) ysi ysi (q1 ) (q ) i 1 i 所以
H 13
(2)求等效转动惯量J e 根据动能等效原则,得:
1 1 2 2 2 J e12 J112 J 22 J H H m2vO2 2 2
2 2
2
vO2 2 H Je J 1 J2 J H m2 1 1 1 2 H 2 z3 2 H 由i23 1 3 2 3 H H z2 H 1 2 H 1 1 2 又 1 4
机械原理与机械设计 (上册) 第4版 第11章 机械系统动力学
k
qi
δW Fe1δq1 Fe2δq2
P Fe1q1 Fe2q2
(i 1,2)
3. 动力学方程
J11q1
J12q2
1 2
J11 q1
q12
J11 q2
q1q 2
J12 q2
1 2
J 22 q1
q22
Fe1
J 12 q1
J 22q2
J12 q1
1 2
J11 q2
q12
J 22 q1
q1q 2
dt
等效驱动力矩
等效阻力矩
若 me 与 Je 为常数,则
Fed Fer M ed M er
me Je
dv dt
d
dt
能量形式(积分形式)
s2 s1
Fedds
s2 s1
Ferds
1 2
me 2 v22
1 2
me1v12
阻抗功
损耗功
总耗功
输入功
Wd (Wr Wf ) Wd Wc E2 E1
终止动能
起始动能
第二节 多自由度机械系统的动力学分析(简介)
机械系统的动力学方程:外力与运动参数(位移、速度等)之间的函数关系式
一、拉格朗日方程
动能
势能
自由度
d dt
E qi
E qi
U qi
Fei
(i 1,2,, N)
J1 1
m2 vc2 Jc2 2
m3v3
d
1 2
J112
1 2
m2vc22
1 2
J
2
c2 2
1 2
m3v32
(M11
P3v3
)dt
第一章单自由度机械系统动力学建模解析

静力分析(static) 动态静力分析(kinetio-static) 动力分析(dynamic) 弹性动力分析(elastodynamic)
1 静力分析
对低速机械,运动中产生的惯性可以忽略不计,对机 械的运动过程中的各个位置,可以用静力学方法求出 为平衡载荷而需在驱动构件上施加的驱动力或力矩, 以及各运动副中的约束反力,可用此进行原动机功率 的计算、构件和运动副承载能力的计算。
v32
(M1
1
v3
F3 )v3
me
n i 1
mi
vsi v
2
等 J效si质 量vi
2 me
Fe
n i 1
Fi
程,其维数等于机构的自由度数目; 另一类是含运动副约束反力的代数与微分混合型
方程,其维数大于机构的自由度数目。
机构动力学分析的发展与现状
建立复杂机构动力学模型的常用力学方法有: * 牛顿-欧拉(Newton-Euler)法 * 拉格朗日(Lagrange)法 * 虚功原理法 * 凯恩(Kane)法 * 旋量法和R-W法等。
机械系统动力学
绪论
机械系统动力学是应用力学的基本理论解决 机械系统中动力学问题的一门学科,其核心 问题是建立机械系统的运动状态与其内部参 数、外部条件之间的关系,找到解决问题的 途径
三体机械臂
可伸展卫星太阳能电池板
汽车
五轴并联机床
机械动力学研究内容 :
机械原理由三部分组成:
机械结构学、机构运动学和机械动力学
4 弹性动力分析
随着机械系统向高速轻质化发展,构件的柔度加大,惯 性力急剧加大,构件的弹性变形可能给机械的运动输出 带来误差。机械系统柔度 系统的固有频率 ,机械 运转速度 激振频率 可能会发生共振,破坏运动精度 ,影响疲劳强度,引发噪声。
机械系统动力学
t
J
0
M()
t0
当 M ()ab 时,可解出t的值
t
t0
Jln ab b ab0
第十四章 机械系统动力学
HIGH EDUCATION PRESS
3.等效转动惯量是常数、等效力矩为等效构件速度函数的运动 方程的求解
将 d d 代入 dt d
J d M()
dt
得:Jdd M()
d J d M()
第十四章 机械系统动力学
HIGH EDUCATION PRESS
三、等效参量的计算
1. 作定轴转动的等效构件的等效参量的计算 2. 作直线移动的等效构件的等效参量的计算
第十四章 机械系统动力学
HIGH EDUCATION PRESS
1.作定轴转动的等效构件的等效参量的计算
等效转动惯量的计算:
动能:
1
A
Mi2 Fi2 G2
CF
曲柄压力机的受力分析
第十四章 机械系统动力学
HIGH EDUCATION PRESS
二、等效构件
名词术语: 1. 等效转动惯量 2. 等效质量 3. 等效力矩 4. 等效力
第十四章 机械系统动力学
HIGH EDUCATION PRESS
二、等效构件
等效构件示意图
第十四章 机械系统动力学
第十四章 机械系统动力学
HIGH EDUCATION PRESS
2.作用在机械上的驱动力
(1)驱动力为常量 (2)驱动力是位移的函数 (3)驱动力是速度的函数
第十四章 机械系统动力学
HIGH EDUCATION PRESS
解析法研究异步电动机驱动力矩特性
M
d
0 tan
作业(二)答案:单自由度机械系统动力学等效转动惯量等效力矩
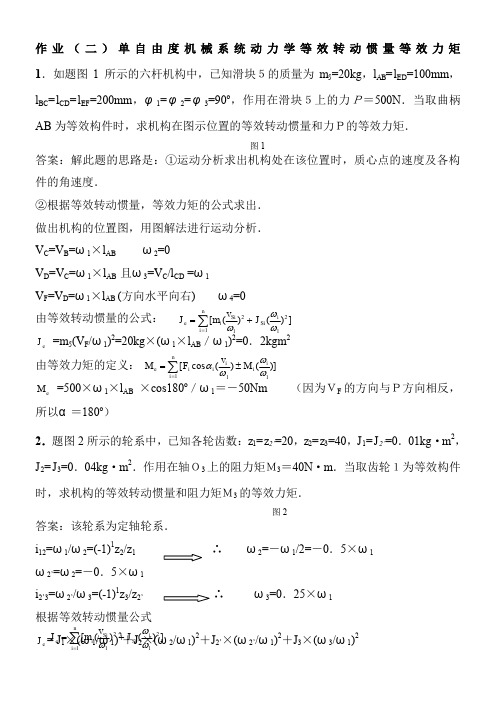
作业(二)单自由度机械系统动力学等效转动惯量等效力矩1.如题图1所示的六杆机构中,已知滑块5的质量为m 5=20kg ,l AB =l ED =100mm ,l BC =l CD =l EF =200mm ,φ1=φ2=φ3=90o ,作用在滑块5上的力P=500N .当取曲柄AB 为等效构件时,求机构在图示位置的等效转动惯量和力P的等效力矩.图1答案:解此题的思路是:①运动分析求出机构处在该位置时,质心点的速度及各构件的角速度.②根据等效转动惯量,等效力矩的公式求出.做出机构的位置图,用图解法进行运动分析.V C =V B =ω1×l AB ω2=0V D =V C =ω1×l AB 且ω3=V C /l CD =ω1V F =V D =ω1×l AB (方向水平向右) ω4=0由等效转动惯量的公式:e J =m 5(V F /ω1)2=20kg ×(ω1×l AB /ω1)2=0.2kgm 2由等效力矩的定义: e M =500×ω1×l AB ×cos180o/ω1=-50Nm (因为VF 的方向与P方向相反,所以α=180o )2.题图2所示的轮系中,已知各轮齿数:z 1=z 2’=20,z 2=z 3=40,J 1=J 2’=0.01kg ·m 2,J 2=J 3=0.04kg ·m 2.作用在轴O3上的阻力矩M3=40N ·m .当取齿轮1为等效构件时,求机构的等效转动惯量和阻力矩M3的等效力矩.图2答案:该轮系为定轴轮系.i 12=ω1/ω2=(-1)1z 2/z 1∴ ω2=-ω1/2=-0.5×ω1ω2’=ω2=-0.5×ω1i 2’3=ω2’/ω3=(-1)1z 3/z 2’ ∴ ω3=0.25×ω1根据等效转动惯量公式e J = J 1×(ω1/ω1)2+J 2×(ω2/ω1)2+J 2’×(ω2’/ω1)2+J 3×(ω3/ω1)2 ∑=+=n i i Si Si i e J v m J 12121]()([ωωω∑=±=n i i i i i i e M v F M 111)]()(cos [ωωωα∑=+=n i i Si Si i e J v m J 12121]()([ωωω=J 1+J 2/4+J 2’/4 +J 3/16=0.01+0.04/4+0.01/4+0.04/16=0.025 kg ·m 2根据等效力矩的公式: e M =M 3×ω3/ω1=40×0.25ω1/ω1=10N ·m3.在题图3所示减速器中,已知各轮的齿数:z 1=z 3=25,z 2=z 4=50,各轮的转动惯量J 1=J 3=0.04kg ·m 2,J 2=J 4=0.16kg ·m 2,(忽略各轴的转动惯量),作用在轴Ⅲ上的阻力矩M 3=100N ·m .试求选取轴Ⅰ为等效构件时,该机构的等效转动惯量J 和M 3的等效阻力矩M r .图3答案:i 12=ω1/ω2=z 2/z 1 ω2=ω1/2 ω3=ω2=ω1/2 i 34=ω3/ω4=z 4/z 3ω4=ω1/4等效转动惯量:J=J 1(ω1/ω1)2+J 2(ω2/ω1)2+J 3(ω3/ω1)2+J 4(ω4/ω1)2=0.042+0.16×(1/2)2+0.04×(1/2)2+0.16×(1/4)2=0.04+0.04+0.01+0.01=0.1 kg ·m 2等效阻力矩:M r =M 3×ω4/ω1=100/4=25(N ·m)4.题图4所示为一简易机床的主传动系统,由一级带传动和两级齿轮传动组成.已知直流电动机的转速n 0=1500r/min ,小带轮直径d =100mm ,转动惯量J d =0.1kg ·m 2,大带轮直径D =200mm ,转动惯量J D =0.3kg ·m 2.各齿轮的齿数和转动惯量分别为:z 1=32,J 1=0.1kg ·m 2,z 2=56,J 2=0.2kg ·m 2,z 2’=32,J 2’=0.4kg ·m 2,z 3=56,J 3=0.25kg ·m 2. 要求在切断电源后2秒,利用装在轴上的制动器将整个传动系统制动住.求所需的制动力矩M 1.图4∑=±=n i i i i i i e M v F M 111()(cos [ωωωα答案:电机的转速n0=1500r/min其角速度ω0=2π×1500/60=50π(rad/s)三根轴的转速分别为:ω1=d×ω0/D=25π(rad/s)ω2=z1×ω1/z2=32×25π/56=1429π(rad/s)ω3=z2’×ω2/z3=32×1429π/56=816π(rad/s)轴的等效转动惯量:J V=J d×(ω0/ω1)2+J D×(ω1/ω1)2+J1×(ω1/ω1)2+J2×(ω2/ω1)2+ J2’×(ω2/ω1)2+ J3×(ω3/ω1)2∴J V=0.1×(50π/25π)2+0.3×12+0.1×12+(0.2+0.1)×(14.29π/25π)2+0.25×(8.16π/25π)2=0.4+0.4+0.098+0.027=0.925 (kg·m2)轴制动前的初始角速度ω1=25π,制动阶段做减速运动,即可求出制动时的角加速度∴ωt=ω0-εt即0=25π-2εε=12.5π则在2秒内制动,其制动力矩M为:M=J V×ε=0.925×12.5=36.31 (kg·m)5.在题图5所示定轴轮系中,已知各轮齿数为:z1=z2’=20,z2=z3=40;各轮对其轮心的转动惯量分别为J1=J2’=0.01kg·m2,J2=J3=0.04kg·m2;作用在轮1上的驱动力矩M d=60N·m,作用在轮3上的阻力矩M r=120N·m.设该轮系原来静止,试求在M d和M r作用下,运转到t=15s时,轮1的角速度ω1和角加速度α1.图5答案:i12=ω1/ω2=(-1)1×z2/z1 ω2=-ω1/2i13=ω1/ω3=(-1)2×z2×z3/z1×z2’ω3=20×20×ω1/40×40=ω1/4轮1的等效力矩M为:M=M d×ω1/ω1+M r×ω3/ω1 =60×1-120/4=30 N·m轮1的等效转动惯量J为:J=J1(ω1/ω1)2+(J2’+J2)(ω2/ω1)2+J3(ω3/ω1)2=0.01×1+(0.01+0.04)/4+0.04/16=0.025 (kg·m2)∵M=J ×ε∴角加速度ε=M/J=1200 (rad/s2)初始角速度ω0=0 ∴ω1=ω0+ε×tω=1200×1.5=1800(rad/s)。
机械系统动力学作业
6
3)、工作辊有大质量差时
图 3-5 在上下工作辊有很大的质量和质量差下固有频率的变化趋势
图 3-6 在上下工作辊有很大的质量和质量差下上下工作辊的主振型差的变化趋势 以上两图是在 m3=30,m2 逐渐减小的情况下得到的,当上下工作辊有很大的质量并且有相对大的差 距时,这里只是对这种变化情况分析 f 和 dh 的变化趋势。由上图 3-5 和图 3-6 可知,在 f4 下,上下工作辊 振型有变化,但是还是维持在很大的高度情况;而在 f3 的情况下有较大的 dh 变化。
各阶振型的图形表示为:
第一阶
第二阶
第三阶
图 2-1 各阶主振型图示
4
第四阶
三、当各参数变化时的分析和优化 3.1 参数[k]和[m]变化对系统的影响
由(2.4)式可知影响固有频率 f 和各阶主振型的因素有[k]和[m]的变化引起,所以这只对这两种情况 进行 MATLAB 计算并画出图形来对比和分析各参数变化时对系统的影响。且影响轧件质量的只要是由上下 工作辊的上下振型差距(dh)决定的。
f2
f3
151.83
481.92
表 2-4 第二阶 -0.4947 -0.2159 0.4555 0.7079
各阶主振型 第三阶 -0.0763 0.7039 0.7019 -0.0778
机械动力学作业
机械动力学作业1、机械动力学的研究内容机械动力学是一门基于Newton力学,研究机械系统宏观动态行为的学科。
该学科的研究对象包括几乎所有具有机械功能的系统,其研究范围涵盖了这类系统的建模与仿真、动力学分析与设计、动力学控制、运行状态监测和故障诊断等。
该学科的主要任务是采用尽可能低的代价使产品在设计、研制、运行各阶段具有最佳的动力学品质。
机械动力学是机械原理的主要组成部分。
它研究机械在运转过程中的受力、机械中各构件的质量与机械运动之间的相互关系,是现代机械设计的理论基础。
研究机械运转过程中能量的平衡和分配关系。
主要研究的是:在已知外力作用下,求具有确定惯性参量的机械系统的真实运动规律;分析机械运动过程中各构件之间的相互作用力;研究回转构件和机构平衡的理论和方法;机械振动的分析;以及机构的分析和综合等等。
研究内容概况6个方面:1、在已知外力作用下,求具有确定惯性参量的机械系统的真实运动规律;分析机械运动过程中各构件之间的相互作用力;研究回转构件和机构平衡的理论和方法;机械振动的分析;以及机构的分析和综合等等。
为了简化问题,常把机械系统看作具有理想、稳定约束的刚体系统处理。
对于单自由度的机械系统,用等效力和等效质量的概念,可以把刚体系统的动力学问题转化为单个刚体的动力学问题;对多自由度机械系统动力学问题一般用拉格朗日方程求解。
机械系统动力学方程常常是多参量非线性微分方程,只在特殊条件下可直接求解,一般情况下需要用数值方法迭代求解许多机械动力学问题可借助电子计算机分析计算机根据输入的外力参量、构件的惯性参量和机械系统的结构信息,自动列出相应的微分方程并解出所要求的运动参量。
2、分析机械运动过程中各构件之间的相互作用力。
这些力的大小和变化规律是设计运动副的结构、分析支承和构件的承载能力以及选择合理润滑方法的依据。
在求出机械真实运动规律后可算出各构件的惯性力,再依据达朗伯原理用静力学方法求出构件间的相互作用力。
机械系统动力学课程简介及大纲
课程内容简介课程中文名称:机械系统动力学课程英文名称:Dynamics of mechanical system开课单位:机电工程学院任课教师及职称(3名以上):开课学期:学分:总学时:适用专业:机械制造及其自动化课程内容简介(400字以内):本课程介绍机械系统中常见的动力学问题、机械动力学问题的类型和解决问题的一般过程,讲述刚性机械系统的动力学分析与设计;机构惯性力平衡的原理与方法;含弹性构件的机械系统的动力学;含柔性转子机械的平衡原理与方法;含间隙副机械的动力学;含变质量机械系统动力学以及机械动力学数值仿真数学基础以及相关软件的仿真实例讲解。
通过本课程的学习,使学生能从系统的角度和动力学的观点了解机械产品动态设计的基础知识,掌握当前机械动力学分析的基本方法,学会运用机械多刚体动力学进行复杂机构的动力学分析与综合运用机械弹性动力学和多柔体系统动力学方法对各类典型机构进行弹性动力分析及综合,具备分析和解决工程实际问题的能力。
教材及主要参考书目:1.杨义勇.机械系统动力学.北京: 清华大学出版社,2009.2.陈立平,张云清,任卫群等.机械系统动力学分析及ADAMS应用教程.北京:清华大学出版社,2005.3.徐业宜.高等学校试用教材.北京:机械工业出版社,1991.4.蒋伟.机械动力学分析.北京:中国传媒大学出版社,2005.5.邵忍平. 机械系统动力学.北京:机械工业出版社,20056.唐锡宽,金德闻.机械动力学.北京:高等教育出版社,1983.课程教学大纲课程中文名称:机械系统动力学课程英文名称:Dynamics of mechanical system学分和学时分配:教学目的:本课程着重培养学生对复杂机械系统动力学建模及分析的能力。
通过本课程学习,要求学生掌握当前机械动力学分析的基本方法,学会运用机械多刚体动力学进行复杂机构的动力学分析与综合运用机械弹性动力学和多柔体系统动力学方法对各类典型机构进行弹性动力分析及综合,具备分析和解决工程实际问题的能力。
机械原理课程教案—机械系统动力学
机械原理课程教案—机械系统动力学一、教学目标1. 让学生理解机械系统动力学的基本概念和原理。
2. 使学生掌握刚体动力学、弹性体动力学和机器动力学的基本分析方法。
3. 培养学生运用机械系统动力学知识解决实际问题的能力。
二、教学内容1. 刚体动力学:刚体的运动方程、刚体运动的合成与分解、刚体动力学的守恒定律。
2. 弹性体动力学:弹性体的基本方程、弹性体的振动、弹性体动力学的应用。
3. 机器动力学:机器的动态特性、机器的振动分析、机器的稳定性和可靠性。
三、教学方法1. 采用讲授法,讲解基本概念、原理和分析方法。
2. 利用多媒体演示,展示实例和动画,增强学生的直观感受。
3. 开展课堂讨论,引导学生主动思考和探究。
4. 布置课后习题,巩固所学知识。
四、教学准备1. 教材:机械系统动力学相关教材。
2. 多媒体课件:包括文字、图片、动画和视频等。
3. 教案:详细的教学计划和步骤。
4. 习题:用于巩固知识的练习题。
五、教学过程1. 引入:通过实例介绍机械系统动力学的重要性,激发学生的兴趣。
2. 讲解:讲解刚体动力学的基本概念和分析方法,引导学生掌握刚体运动的合成与分解。
3. 演示:利用多媒体演示刚体动力学的实例和动画,让学生更好地理解刚体动力学的原理。
4. 练习:布置刚体动力学的练习题,让学生巩固所学知识。
5. 课堂讨论:引导学生讨论刚体动力学在实际工程中的应用,培养学生的实际问题解决能力。
6. 布置作业:布置刚体动力学的课后习题,让学生进一步巩固知识。
六、教学内容(续)4. 机器动力学:机器的动态特性分析机器的振动分析与控制机器的稳定性和可靠性评估机器的故障诊断与预测七、教学重点与难点1. 教学重点:刚体动力学的基本分析方法弹性体动力学的振动分析和应用机器动力学的动态特性分析机器的振动控制和稳定性评估2. 教学难点:弹性体动力学的复杂方程求解机器动力学中的非线性问题机器的故障诊断与预测算法八、教学评价1. 课堂参与度:观察学生在课堂讨论和提问中的活跃程度。