大欧拉角的空间直角坐标转换方法探讨
直角坐标系中的几何变换方法总结

直角坐标系中的几何变换方法总结直角坐标系是我们在数学和物理学中经常使用的一种坐标系统。
在直角坐标系中,我们可以通过坐标点的位置来描述一个点的位置。
然而,在实际问题中,我们经常需要对坐标系进行一些变换,以便更好地解决问题。
本文将总结一些常见的几何变换方法,帮助读者更好地理解和应用直角坐标系。
一、平移变换平移变换是指在直角坐标系中将一个图形沿着某个方向移动一定的距离。
平移变换不改变图形的形状和大小,只改变了它的位置。
在直角坐标系中,我们可以通过将图形中的每个点的坐标增加或减少相同的数值来实现平移变换。
例如,如果我们要将一个图形沿着x轴正方向平移3个单位,我们可以将每个点的x坐标加3。
二、旋转变换旋转变换是指在直角坐标系中将一个图形绕着某个点或某个轴旋转一定的角度。
旋转变换不改变图形的大小和形状,只改变了它的方向。
在直角坐标系中,我们可以通过将图形中的每个点绕着旋转中心进行旋转来实现旋转变换。
旋转的角度可以用弧度或度数来表示。
例如,如果我们要将一个图形绕着原点逆时针旋转90度,我们可以使用旋转矩阵来计算每个点的新坐标。
三、缩放变换缩放变换是指在直角坐标系中将一个图形沿着某个方向放大或缩小一定的比例。
缩放变换改变了图形的大小,但不改变它的形状和方向。
在直角坐标系中,我们可以通过将图形中的每个点的坐标乘以相同的比例因子来实现缩放变换。
例如,如果我们要将一个图形沿着x轴方向放大2倍,我们可以将每个点的x坐标乘以2。
四、对称变换对称变换是指在直角坐标系中将一个图形关于某个点、某个直线或某个平面进行对称。
对称变换不改变图形的大小和形状,只改变了它的位置。
在直角坐标系中,我们可以通过将图形中的每个点的坐标关于对称中心进行对称来实现对称变换。
例如,如果我们要将一个图形关于x轴进行对称,我们可以将每个点的y坐标取负值。
五、剪切变换剪切变换是指在直角坐标系中将一个图形沿着某个方向进行拉伸或压缩。
剪切变换改变了图形的形状,但不改变它的大小和方向。
欧拉角与旋转矩阵的转换方法

欧拉角与旋转矩阵的转换方法欧拉角(Euler angles)和旋转矩阵(rotation matrix)是描述物体在三维空间中旋转的常用数学工具。
欧拉角由三个旋转轴和三个旋转角度组成,而旋转矩阵是一个3x3的正交矩阵。
这两种表示方法之间的转换方法可以分为两个步骤:将欧拉角转换为旋转矩阵,或将旋转矩阵转换为欧拉角。
一、欧拉角转换为旋转矩阵欧拉角的转换公式有多种实现方式,其中最为常用的是Z-Y-X欧拉角序列的转换公式。
假设欧拉角序列为ψ、θ、φ(分别表示绕Z轴、Y轴和X轴的旋转角度),则对应的旋转矩阵R可以通过以下的步骤来计算:1.将ψ、θ、φ分别转换为对应的旋转矩阵Rz(ψ)、Ry(θ)和Rx(φ),这里Rz、Ry和Rx分别表示绕Z轴、Y轴和X轴的旋转矩阵。
2.将Rz(ψ)、Ry(θ)和Rx(φ)按照Z-Y-X的次序相乘,得到最终的旋转矩阵R=Rz(ψ)Ry(θ)Rx(φ)。
具体地,Rz(ψ)、Ry(θ)和Rx(φ)的计算公式如下:Rz(ψ) = [[cos(ψ), -sin(ψ), 0], [sin(ψ), cos(ψ), 0], [0, 0, 1]]Ry(θ) = [[cos(θ), 0, sin(θ)], [0, 1, 0], [-sin(θ), 0, cos(θ)]]Rx(φ) = [[1, 0, 0], [0, cos(φ), -sin(φ)], [0, sin(φ), cos(φ)]]将以上的计算公式代入到步骤2中,就可以得到欧拉角对应的旋转矩阵R。
二、旋转矩阵转换为欧拉角将旋转矩阵转换为欧拉角的过程比较复杂,通常需要分解出旋转矩阵的三个旋转角度。
下面介绍一种常用的分解方法,即将旋转矩阵分解为绕Z轴、Y轴和X轴旋转的角度。
假设旋转矩阵为R,则分解的步骤如下:1.计算R矩阵第三列的单位向量v32. 计算v3在xz平面上的投影v3_projected,即将v3的y分量设为0。
3. 计算v3与单位向量z的夹角θ1、可以使用反余弦函数计算cos(θ1) = v3_projected · z,其中·表示向量的点积。
旋转矩阵、欧拉角、四元数理论及其转换关系

旋转矩阵、欧拉⾓、四元数理论及其转换关系1. 概述旋转矩阵、欧拉⾓、四元数主要⽤于表⽰坐标系中的旋转关系,它们之间的转换关系可以减⼩⼀些算法的复杂度。
本⽂主要介绍了旋转矩阵、欧拉⾓、四元数的基本理论及其之间的转换关系。
2、原理2.1 旋转矩阵对于两个三维点p1(x1,y1,z1),p2(x2,y2,z2),由点 p1 经过旋转矩阵 R 旋转到 p2,则有注:旋转矩阵为正交矩阵RR^T=E任意旋转矩阵:任何⼀个旋转可以表⽰为依次绕着三个旋转轴旋三个⾓度的组合。
这三个⾓度称为欧拉⾓。
三个轴可以指固定的世界坐标系轴,也可以指被旋转的物体坐标系的轴。
三个旋转轴次序不同,会导致结果不同。
2.2 欧拉⾓欧拉⾓有两种:静态:即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静⽌,所以称为静态。
动态:即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态。
使⽤动态欧拉⾓会出现万向锁现象;静态欧拉⾓不存在万向锁的问题。
对于在三维空间⾥的⼀个参考系,任何坐标系的取向,都可以⽤三个欧拉⾓来表现。
参考系⼜称为实验室参考系,是静⽌不动的。
⽽坐标系则固定于刚体,随着刚体的旋转⽽旋转。
如图1,设定xyz-轴为参考系的参考轴。
称xy-平⾯与XY-平⾯的相交为交点线,⽤英⽂字母(N)代表。
zxz顺规的欧拉⾓可以静态地这样定义:α是x-轴与交点线的夹⾓,β是z-轴与Z-轴的夹⾓,γ是交点线与X-轴的夹⾓。
图中三个欧拉⾓分别为:(α,β,γ);蓝⾊的轴为:xyz轴红⾊的轴为:XYZ轴绿⾊的线为交线:Nα∈[0,2π],β∈[0,π],γ∈[0,2π]很可惜地,对于夹⾓的顺序和标记,夹⾓的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当⽤到欧拉⾓时,我们必须明确的表⽰出夹⾓的顺序,指定其参考轴。
实际上,有许多⽅法可以设定两个坐标系的相对取向。
欧拉⾓⽅法只是其中的⼀种。
此外,不同的作者会⽤不同组合的欧拉⾓来描述,或⽤不同的名字表⽰同样的欧拉⾓。
欧拉角
欧拉角科技名词定义中文名称:欧拉角英文名称:Euler angles定义:构件在三维空间中的有限转动,可依次用三个相对转角表示,即进动角、章动角和自旋角,这三个转角统称为欧拉角。
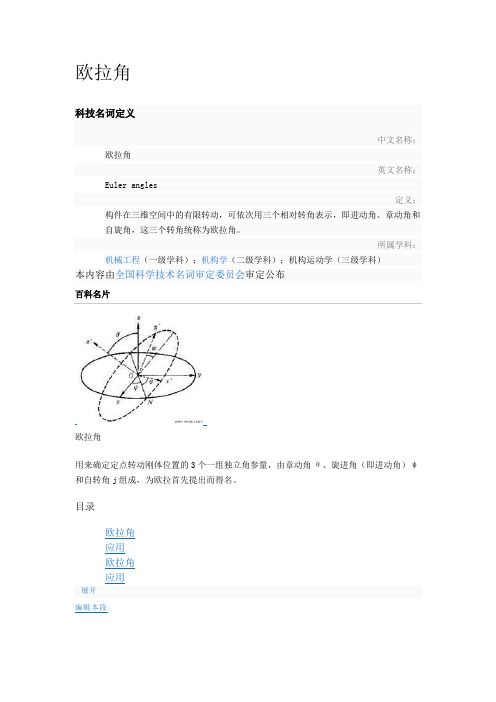
所属学科:机械工程(一级学科);机构学(二级学科);机构运动学(三级学科)本内容由全国科学技术名词审定委员会审定公布欧拉角用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角j组成,为欧拉首先提出而得名。
目录它们有多种取法,下面是常见的一种。
如图所示,由定点O作出固定坐标系Oxyz和固连于刚体的动坐标系Ox′y′z′。
以轴Oz和Oz′为基本轴,其垂直面Oxy和Ox′y′为基本平面。
由轴Oz欧拉角量到Oz′的角θ称章动角。
平面zOz′的垂线ON称节线,它又是基本平面Ox′y′和Oxy的交线。
在右手坐标系中,由ON的正端看,角θ应按逆时针方向计量。
由固定轴Ox量到节线ON的角ψ称旋进角;由节线ON量到动轴Ox′的角j称自转角。
由轴Oz和Oz′正端看,角ψ和j也都按逆时针方向计量。
若令Ox′y′z′的初始位置与Oxyz重合,经过相继绕Oz、ON和Oz′的三次转动后,刚体将转到图示的任意位置。
如果刚体绕通过定点O的某一轴线以角速度ω转动,而ω在动坐标系Ox′y′z′上的投影为ωx′、ωy′、ωz′,则它们可用欧拉角及其微商表示如下:ωx′=sinθsinj+cosj,ωy′= sinθcosj-sinj,ωz′=cosθ+。
如果已知ψ、θ、j和时间的关系,则可用上式计算ω在动坐标轴上的3个分量;反之,如已知任一瞬时t的ω各个分量,也可利用上式求出ψ、θ、j和时间t的关系,因而也就决定了刚体的运动。
上式通常被称为欧拉运动学方程。
原理欧拉角Eulerian angles用来唯一地确定定点转动刚体位置的三个一组独立角参量[1],由章动角θ、进动角ψ和自转角嗞组成,为L.欧拉首先提出,故得名。
对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。
不同坐标系之间的变换
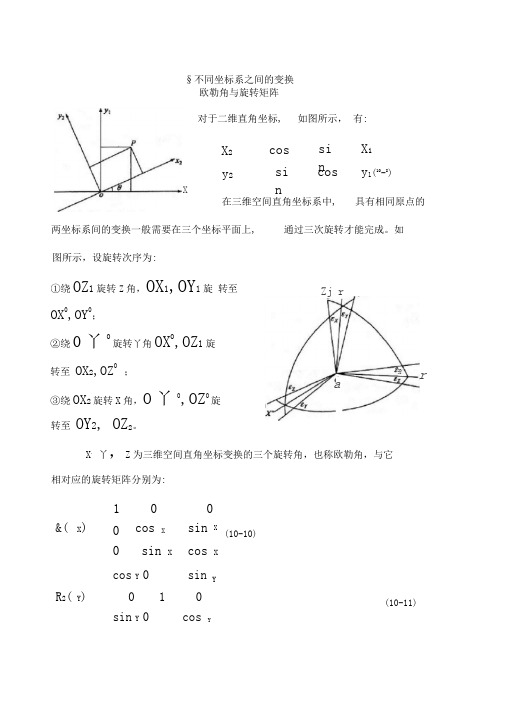
§不同坐标系之间的变换欧勒角与旋转矩阵X 对于二维直角坐标, 如图所示, 有: X2 y2 cos sinsi n cos在三维空间直角坐标系中, 两坐标系间的变换一般需要在三个坐标平面上, 图所示,设旋转次序为: ①绕OZ1旋转Z 角,OX 1,OY 1旋 转至OX 0,OY0; ②绕0丫0旋转丫角OX 0,OZ 1旋转至 OX 2,OZ 0; ③绕OX 2旋转X 角,O 丫0,OZ旋转至 OY 2, OZ 2。
X 1 y1(10-8) 具有相同原点的 通过三次旋转才能完成。
如 SxarZj rX ,丫,Z 为三维空间直角坐标变换的三个旋转角,也称欧勒角,与它 10 0&( X )0 cos XsinsinXcoscos Y 0 sin R 2( Y )0 1 0sin Y 0cos Y相对应的旋转矩阵分别为: YX (10-10) X (10-11)R3(Z) cos Z sin Z0sin Z cos Z00 0 1(10-12)令R o R1 ( X )R2 ( Y )R3( Z (10-13) 则有:X2丫2 J R1 ( X )R2 ( Y )R3(X1z) Y1Z1R oX1丫1Z1(10-14)代入:cos Y cos ZR o cos X sin z sin X si门丫cosZsin X sin Z cos X sin Y cosZcos Y sin Zcos X cos Z sin X si门丫sin Zsin X cos Z cos X sin Y sinZ为微小转角, 可取:于是可化简R o X(10-16)1上式称微分旋转矩阵。
不同空间直角坐标之间的变换当两个空间直角坐标系的坐标换算既有旋转又有平移时,则存在三个平移参数和三个旋转参数,再顾及两个坐标系尺度不尽一致,从而还有一sin Y sin X cos Y COS X COS Y个尺度变化参数,共计有七个参数。
世界坐标系到相机坐标系变换矩阵 欧拉角计算

世界坐标系到相机坐标系变换矩阵及欧拉角计算一、概述在计算机视觉和计算机图形学领域中,世界坐标系到相机坐标系变换矩阵和欧拉角计算是非常重要且常用的技术。
本文将通过具体的介绍和示例,详细讨论世界坐标系到相机坐标系变换矩阵及欧拉角的计算方法。
二、世界坐标系和相机坐标系简介1. 世界坐标系世界坐标系是指在三维空间中描述物体位置和方向的坐标系。
它通常是一个固定的参考框架,用于描述物体在空间中的位置和姿态。
2. 相机坐标系相机坐标系是相机传感器坐标系中的一个坐标系,它描述了相机的位置和方向。
相机坐标系通常位于相机传感器中心,其坐标轴与传感器平面平行。
三、世界坐标系到相机坐标系变换矩阵的推导1. 坐标变换原理当世界坐标系中的物体经过相机的观测时,需要将物体的坐标转换到相机坐标系中。
这个转换过程可以通过一个变换矩阵来实现,该矩阵包括平移、旋转和缩放等变换操作。
2. 变换矩阵的计算设世界坐标系下的一个物体点坐标为Pw = (Xw, Yw, Zw),相机坐标系下的坐标为Pc = (Xc, Yc, Zc)。
那么Pc与Pw之间的变换关系可以表示为:Pc = T * R * Pw其中T为平移矩阵,R为旋转矩阵。
根据相机的内参矩阵和外参矩阵,可以得到T和R的具体数值,进而得到世界坐标系到相机坐标系的变换矩阵。
四、欧拉角的计算方法1. 欧拉角的定义欧拉角是描述物体姿态的一种方式,它由三个角度组成,通常分别表示绕三个坐标轴的旋转角度。
2. 欧拉角的计算在计算机视觉中,通常使用旋转矩阵或四元数来表示物体的旋转姿态。
而将旋转矩阵或四元数转换为欧拉角则是一个常见的需求。
欧拉角的计算方法有多种,常见的包括将旋转矩阵转换为欧拉角、将四元数转换为欧拉角等。
五、示例分析以下将通过一个具体的示例来演示世界坐标系到相机坐标系的变换矩阵和欧拉角的计算方法。
假设世界坐标系中的一个物体点坐标为Pw = (1, 1, 1),相机坐标系的内参矩阵为K,外参矩阵为[R|T]。
大学物理学理论力学—欧拉角
⼤学物理学理论⼒学—欧拉⾓对于欧拉⾓的认识[摘要]基于欧拉⾓的学习,加深认识关于欧拉⾓的相关知识点。
定点运动的刚休可由欧拉⾓来描写出发,通过计算刚体上任意⼀点的速度来引⼊刚体的⾓速度。
从欧拉⾓的理解中做到熟练掌握欧拉⾓、欧拉⾓的矩阵形式的表⽰、明确欧勒⾓的含义和它为什么完整的描述了定点转动刚体的运动状态,以及欧拉⾓在刚体⼒学中的具体应⽤,从⽽更好的理解欧拉⾓。
[关键词]欧拉⾓的定义;⾓速度;⾓加速度;刚体定点转动的应⽤ 1:欧拉⾓的定义虽然当刚体作定点转动时,我们可选这个定点作为坐标系的原点,⽽⽤三个独⽴的⾓度来确定转动轴在空间的取向和刚体绕该轴线所转过的⾓度。
刚体转动可以表⽰为空间坐标系到本体坐标系的⼀个正交变换,变换矩阵由9个⽅向余弦决定,但它们中只有3个是独⽴的,使⽤起来不⽅便。
最好能⽤有明确⼏何意义的3个变量来描述刚体的位置,前⾯已证明,可以给出刚体上的⼀个轴的⽅向,和刚体绕这个轴的转⾓来描述刚体定点运动的位置,因此我们可以⽤类似球坐标中的极⾓θ和⽅位⾓φ来给出轴的取向,再加上绕这个轴旋转的⾓度φ,三个⾓度来描述刚体的定点转动,它们合称为欧拉⾓我们要把本体坐标系和空间坐标系间的正交变换⽤欧拉⾓表⽰出来。
如上图所⽰,向由θ和φ决定,⽽φ是刚体绕该轴的转⾓。
从坐标变换的⾓度看,本体坐标转到图(c)的状态,可以分解为从图(a)经过(b),通过相继三次2D 旋转得到的(假定开始时本体坐标系x x y z '''-与空间坐标系o xyz -重合):⑴o xyz o εηζ-→-本体坐标系绕z 轴在xy 平⾯上旋φ⾓:cos sin 0sin cos 0001x y z εφφηφφζ?????? ?=- ? ??? ? ??????⑵o εηζεηζ'''-→,本体坐标系绕ε轴在ηζ平⾯转过θ⾓:1000cos sin 0sin cos εεηθθηζθθζ'?????? ? ???'= ? ??? ? ???'-??????⑶x y z εηζ''''''→本体坐标绕ζ'轴在ηε''平⾯(阴影)转过ψ⾓:cos sin 0sin cos 0001x y z ψψψψ'???? ?'=- '变换矩阵就是三个2D 变换矩阵之积:cos sin 0100cos sin 0sin cos 00cos sin sin cos 00010sin cos 001x x ψψφφψψθθφφθθ?????? ?????'=-- ????? ?????-??????它们由3个欧拉⾓决定。
[转]欧拉角与旋转
[转]欧拉⾓与旋转1,什么是欧拉⾓欧拉⾓的基本思想是将⾓位移分解为绕三个互相垂直轴的三个旋转组成的序列。
这听起来复杂,其实它是⾮常直观的。
之所以有“⾓位移”的说法正是因为欧拉⾓能⽤来描述任意旋转,但最有意义的是使⽤笛卡尔坐标系并按照⼀定顺序所组成的旋转序列。
最常⽤的约定,即所谓“heading-pitch-bank”约定。
在这个系统中,⼀个⽅位被定义为⼀个heading⾓,⼀个pitch⾓,和⼀个bank⾓。
它的基本思想就是让物体开始于“标准”⽅位——就是物体坐标轴和惯性坐标轴对齐。
在标准⽅位上,让物体作heading,pitch,bank旋转,最后物体到达我们想要描述的⽅位。
在精确定义术语“heading”“pitch”“bank”前,先让我们简要回顾本书中使⽤的坐标空间约定。
我们使⽤左⼿坐标系,+x向右,+y向上,+z向前。
heading为绕y轴的旋转量,向右旋转为正,旋转正⽅向是顺时针⽅向,经过heading旋转之后,pitch为绕x轴的旋转量,注意是物体坐标系的x轴,不是原惯性坐标系的x轴,依然遵守左⼿法则,向下旋转为正。
最后,经过了heading,pitch后,bank为绕z轴的旋转量,依然是物体坐标系的z轴。
当我们说到旋转的顺序是heading-pitch-bank时,是指从惯性坐标系到物体坐标系,如果从物体坐标系到惯性坐标系则相反。
2,关于欧拉⾓的其他约定前⾯曾提到过,heading-pitch-bank系统不是惟⼀的欧拉⾓系统,绕任意三个互相垂直轴的任意旋转序列都能定义⼀个⽅位。
所以,多种选择导致了欧拉⾓约定的多样性:1)heading-pitch-bank系统有两个名称,当然,不同的名字并不代表不同的约定,这其实并不重要,⼀组常⽤的术语是roll-pitch-yaw,其中的roll对应与bank,yaw对应于heading,它定义了从物体坐标系到惯性坐标系的旋转顺序2)任意三个轴都能作为旋转轴,不⼀定必须是笛卡尔轴,但是⽤笛卡尔轴最有意义3)也可以选⽤右⼿坐标规则4)旋转可以以不同的顺序进⾏3,优点:1)容易使⽤;2)表达简洁;3)任意三个⾓都是合法的4,缺点:1)给定⽅位的表达⽅式不唯⼀;2)两个⾓度间求插值⾮常困难采⽤限制欧拉⾓的⽅法来避免以上问题的出现:heading限制在+-180,pitch为+-90。
空间坐标变换
空间坐标变换空间坐标变换是指将一个坐标系下的点在另一个坐标系下进行表示的过程。
它在许多领域中都有广泛的应用,例如计算机图形学、机器人技术、地理信息系统等。
在这篇文章中,我们将介绍空间坐标变换的基本概念和常见的变换方法。
一、空间坐标系空间坐标系是一个用于描述三维空间中点的系统。
常见的坐标系有直角坐标系、极坐标系和球坐标系等。
在直角坐标系中,一个点的位置可以由其在三个相互垂直的轴上的坐标表示。
例如,一个点的直角坐标为(x,y,z),其中x、y、z分别表示其在x轴、y轴和z轴上的坐标值。
二、空间坐标变换的基本概念空间坐标变换是指将一个坐标系下的点在另一个坐标系下进行表示的过程。
在进行坐标变换时,我们通常需要考虑平移、旋转和缩放等操作。
以下是空间坐标变换中常用的几种基本操作:1. 平移:平移是指将点沿着某个方向移动一定的距离。
平移操作可以通过在原始坐标上加上平移向量来实现。
2. 旋转:旋转是指将坐标系绕某个轴进行旋转。
旋转操作可以通过矩阵乘法或四元数运算来表示。
3. 缩放:缩放是指将坐标系在各个轴上进行拉伸或压缩。
缩放操作可以通过矩阵乘法来实现。
三、空间坐标变换的常见方法1. 矩阵变换法:矩阵变换法是一种常见的空间坐标变换方法。
它通过矩阵的乘法来表示平移、旋转和缩放等操作。
假设我们有一个点P在坐标系A下的坐标为(x,y,z),要将其转换到坐标系B下,可以使用以下矩阵方程表示:[x'] [a b c d] [x][y'] = [e f g h] * [y][z'] [i j k l] [z][1 ] [0 0 0 1] [1]其中,(x',y',z')表示点P在坐标系B下的坐标。
矩阵中的(a,b,c)表示坐标系B相对于坐标系A的x轴方向的变换,(d,e,f)表示y轴方向的变换,(g,h,i)表示z轴方向的变换。
2. 四元数变换法:四元数变换法是一种常用的空间坐标变换方法。
大学测量《大地测量》教学课件:22欧拉角和坐标系转换
Y
c os 1
Z cos1
c os 2 cos2 cos 2
cos3 X
c
os3
Y
cos 3 Z
7.1 大地坐标系中的欧勒角
独立方向角 1、右手空间直个角数坐?标系的旋转变换公式
ii 1 i j 0 i k 0 j j 1 j k 0 k k 1
cos2 1 cos2 1 cos2 1 1 cos2 2 cos2 2 cos2 2 1
水平方向 平面距离 平面方位角
布设水平 观最测 高地等面级上观 控制网水平控制测网元,素
归算
椭球面上 的元素
归算
高斯平面 的元素
已知数据从何
推算 平差
推算 平差
而来?
水平坐标
大地坐标 (L,B)
平面坐标 (X,Y)
7.1 大地坐标系中的欧勒角
1、右手空间直角坐标系的旋转变换公式
以方向角为参数
1, 1,1,2 , 2 , 2 ,3, 3, 3
X 1 εZ εY X
一般YZ情 况?
εZ εY
1 εX
O
X Y
RZ ( εZ ) sin Z cos εZ 0
0
0 1
XX
Y Z
Xscino0ZsXXsYisnincYoZscYosiscnosXXsZisninY
X
Z Y
Y cosZY cos Z
0
cos X sin X
cosY sin Z cos εY
ccoossZZRYsc(inoεsYX)XssininsYiYns0sininYZZ
2h
22
第七章 大地坐标系的建立
7.1 大地坐标系中的欧勒角 7.2 不同大地坐标系的转换
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1姚吉利.3维坐标转换参数计算的严密公式[J].测绘通 报,2006,(5):7—10
2曾文宪,陶本藻.3维坐标转换的非线性模型l-J].武汉大 学学报(信息科学版),2003,28(5):566 568
3陈义,沈云中,刘大杰.适用于大旋转角的三维基准转换 的一种简便模型[J].武汉大学学报(信息科学版),2004, 29(12):1101—1104
4结论
4.1基于罗德里格矩阵的三维空间坐标变换模 型适合大欧拉角的坐标变换,解决了工程独立控 制网与国家坐标系统之间的坐标转换问题,适用 面广。 4.2旋转矩阵中ex,£y,e:为角度值,受三角函数周 期性的影响,在大欧拉角坐标转换时,模型稳定性 较差。利用罗德里格矩阵来代替旋转矩阵,其中的 a、b、e三个参数不受角度的周期性的影响,模型稳 定性好。 4.3该算法无需转换参数初始值,程序中以0为初 始值来计算,同样得到很好的转换参数结果,说明 该转换模型具有良好的可靠性。
4李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北 京:测绘出版社,2001
5周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北 京:测绘出版社,2004
Discussion on the Way of Space Right-Angle Coordinate Transform of the Big Euler Angle
万方数据
大欧拉角的空间直角坐标转换方法探讨
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
胡亚江, 杨晓梅, 沙月进, Hu Yajiang, Yang Xiaomei, Sha Yuejin 东南大学交通学院,江苏,南京,210096
现代测绘 MODERN SURVEYING AND MAPPING 2006,29(6) 2次
一
£y一0
●一△,一△ 旦△p@ 一 竺。瞳一o 曲一2) ex一0
瓢…一糊腆取 2.3 罗德里格矩阵参数近似值选取 ;-1 一£z --£Y7
打贼Z。二£x叶融1 口J ,凯旅丸
而ex和£y取0时,对应项相等可得:
C27
褊…护。奇~一ezo 肼”H“ ”“
一1一_~
““。。“。
舳弧:1十鸯百 一减一嘶1毒十百一 ey
本文应用罗德里格矩阵来表示空间直角坐标转换 的7参数模型的旋转矩阵,以布尔沙(Bursa)模型为基 本变换模型,推导出平差计算的数学模型。检验证明, 由于罗德里格矩阵中的三格参数为标量,避免了三个 角元素受周期性的影响,使得平差结果十分稳定。
2数学模型
2.1 空间坐标变换的布尔沙模型
空间一点在a一蜀y-乙中坐标为巨],在Q
Hu Yaj iang,Yang Xiaomei,ShaYuej in (Transportation College,Southeast University,Nanjing 210096,China)
Abstract Firstly the necessity of building the model of space right—angle coordinate transform is pointed Out;then the space right-angle coordinate transform mathematics model based on the big Euler angle and the rotation matrix expressed by Rodrigo matrix is deduced;finally the example of Bursa model is set,Visual C#.Net 2003 is applied to program the calcula— tiom The space right-angle coordinate transform based on any big Euler angle can be implemented steadily through this model in a very high speed and in high accuracy,and initialization of the transform parameters can be any value. Key words Transform parameters;Bursa model;Rodrigo matrix;Big Euler angle;Indirect adjustment
一n一虿
1+了1(一Ⅱ2—62+c2)
第6期
胡亚江等:大欧拉角的空问直角坐标转换方法探讨
11
记△一1+丢(以2+62+c2)。
2.2基于罗德里格矩阵的布尔沙模型严密计算数 学模型
以模型中的AX、△y、△z、肚a、6、f为7个转换 参数,参数的改正数为Az、Ay、敝、咖、da、db、dc。 根据问接平差原理列出误差方程如下:
㈨ 1 o 6,x。+6。y,+6。Z1(--bX。
(一nX。+6y,
(2Xl
一6Z-)等I“)
o 1 flxl Av c2yl+f321(cXl+2Y。一以1)生2A(2Xl—cyl 皆 磁 ) 悃,告j (aXl 6y
㈨一
线性化过程中为了方便计算,对△一1+丢(以2
~
, ●、\
2£Z
+b2+c2)没有求导数,因此平差过程需要迭代计 算。取两个坐标系中公共点个数n(n大于3),则可 列出3咒个误差方程式,按照间接平差方法解算上述
或b≈£y。
万方数据
12
现代测绘
第29卷
3程序设计和算例
3.1 程序设计 为了实现空间三维坐标转换计算,笔者使用
Visual C#.NET 2003为开发工具编制了计算程 序,程序有两个主要功能,一是根据三个以上的控 制点计算转换参数,二是在已知转换参数的情况 下实现对转换点在两个坐标系中的转换计算。图 1是程序类视图,其辅助计算模块包含三个类: Cpoint、Cpara类和Ccal。其中Cpoint为转换点类, 包含有转换点的点号以及在两个坐标系中的坐标 共七个属性;Cpara为参数类,包含有三维转换的 七个参数以及根据罗德里格反算出的三个旋转 角;Ccal类用于实现转换计算功能,该类设计类两 个重要方法:dircetcal(Cpoint[],Cpara)方法用来实 现利用Cpara参数对Cpoint[]坐标数组计算转换 计算,intervalcal(Cpoint[],Cpara)方法用来实现根 据控制点Cpoint[]坐标数组计算转换参数Cpara。 本程序的数据输入和输出都以文本文件的方式进 行读写。
引证文献(2条)
1.胡现辉.范晓进.姚麒麟.潘国荣 高压输电线路勘测中坐标转换程序开发[期刊论文]-铁道勘察 2007(4) 2.原玉磊.蒋理兴.刘灵杰 罗德里格矩阵在坐标系转换中的应用[期刊论文]-测绘科学 2010(2)
本文链接:/Periodical_xdch200606003.aspx 授权使用:中科院电子学研究所(中科院电子学研究所),授权号:fd2c8efd-794b-4206-8f06-9ddf0123bd94
2004(12) 4.李德仁.周月琴.金为铣 摄影测量与遥感概论 2001 5.周忠谟.易杰军.周琪 GPS卫星测量原理与应用 2004
相似文献(1条)
1.期刊论文 陈贻胜.CHEN Yisheng 坐标转换参数的求解方法及其应用 -上海地质2006,""(2)
根据坐标转换参数的解算模型,介绍几种常见的坐标转换参数的求解方法及其参数个数与精度;探讨选择坐标转换参数的条件及转换参数的应用,从而 阐明转换参数对GPS技术的推广和全球资料的统一的重要作用.
参考文献(5条)
1.姚吉利 3维坐标转换参数计算的严密公式[期刊论文]-测绘通报 2006(05) 2.曾文宪.陶本藻 3维坐标转换的非线性模型[期刊论文]-武汉大学学报(信息科学版) 2003(05) 3.陈义.沈云中.刘大杰 适用于大旋转角的三维基准转换的一种简便模型[期刊论文]-武汉大学学报(信息科学版)
第29卷第6期
1111兰!!望
现代测绘 坠呈垒呈!望量些!兰呈¥!坠星垒垒鱼些垒望望!垒星
v。I.29,N。.6
型!兰!!!!
大欧拉角的空间直角坐标转换方法探讨
胡亚江,杨晓梅,沙月进
(东南大学交通学院,江苏南京210096)
摘要首先指出建立使用大旋转角的空间直角坐标转换模型的必要性,接着推导出以罗德里格矩阵为旋转矩阵
xzK乙中坐标为睦],q在@一冠yz Zz中坐标为
筒,a喝y,硼尺度扎Q毯y。乙的尺度舯+
if)。两坐标系统之间的布尔沙(Bursa)变换模型为:
匿X2]一lA竺引X+c,+P,Rcsx,Rc科,Rcez,阵]c,,
其中R(ex)R(£y)R(e:)为旋转矩阵,记为R一
1)当欧拉角为小角度时的旋转矩阵:
肤蕾二爿e-'T
号0 设反对称矩阵5=
一万a ,其元素皂 9i9a0是独立的。旋转矩阵R由S构成的罗德里格矩阵 表示为:
万方数据
1+百1(血2—62一f2)
—1—+—丢———(—以———2—十——!6二—2—+—c——2—)一
曲 ‘一可
b+azc
oh
。
2
1+{(“+62。)
&
以一虿
一b1堕3-. - &
、.
图1程序类视图 3.2 算例及分析
为了检验该算法的效果,利用程序的正反算功
能进行了验算。首先选取了每个GPS网在WGS84 坐标系统下的5个点的三维空间直角坐标,模拟了 变换参数,计算这些点在目标坐标系中的三维坐 标。然后,以这5个点的两套坐标为控制点,反算变 换参数,七个转换参数的起算近似值都设为0,平差 迭代计算中相邻两次的限差e一1×10~。计算效果 及精度都很理想。