实验三 弹簧阻尼器机构的动力学模拟
弹簧-质量-阻尼实验指导书
质量-弹簧-阻尼系统实验教学指导书北京理工大学机械与车辆学院2016.3实验一:单自由度系统数学建模及仿真 1 实验目的(1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。
2 实验原理单自由度质量-弹簧-阻尼系统,如上图所示。
由一个质量为m 的滑块、一个刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。
系统输入:作用在滑块上的力f (t )。
系统输出:滑块的位移x (t )。
建立力学平衡方程:m x c x kx f ∙∙∙++=变化为二阶系统标准形式:22f x x x mζωω∙∙∙++=其中:ω是固有频率,ζ是阻尼比。
ω=2c m ζω== 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应:()()sin()))]t t x t t d e ζωττζωττ+∞--=∙-=-+-⎰2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应:02230022222002222222()cos(arctan())2f[(0)]cos()[()(2)]sin(ttx t tx ekeζωζωζωωωωωζωωωωζωω-∙-=--++-++)输出振幅和输入振幅的比值:A=3 动力学仿真根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。
仿真代码见附件4 实验4.1 固有频率和阻尼实验(1)将实验台设置为单自由度质量-弹簧-阻尼系统。
(2)关闭电控箱开关。
点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。
(3)点击Command菜单,选择Trajectory,选取step,进入set-up,选取Open Loop Step 设置(0)counts, dwell time=3000ms,(1)rep, 然后OK。
阻尼弹簧减震器工作原理

阻尼弹簧减震器工作原理
阻尼弹簧减震器是一种将弹簧和阻尼器结合起来的装置,其主要工作原理是通过利用弹簧和阻尼器对振动能量进行吸收和耗散,从而减少机械系统的振动和冲击。
在阻尼弹簧减震器中,弹簧负责承担和传递载荷,而阻尼器则起到消耗振动能的作用。
当机械系统受到外力作用时,弹簧首先会发生变形,吸收部分能量。
随后,这部分能量会通过阻尼器传递到其它组件中,并通过摩擦、液体阻尼或气体阻尼等方式转化为热能进行耗散。
其中,阻尼器的工作原理有多种,常见的有液体阻尼器和气体阻尼器。
液体阻尼器是利用内部封装的粘稠液体在阻尼过程中产生阻力,通过液体内部的黏性阻碍运动来消耗振动能量。
气体阻尼器则是通过内部的气体压力变化来实现振动能量的消耗和耗散。
通过合理选择弹簧的刚度和阻尼器的特性,可以使阻尼弹簧减震器在工作过程中有效地减少机械系统的振动和冲击。
这在很多工程和交通工具中得到广泛应用,例如汽车悬挂系统、建筑物结构减震等领域。
机构阻尼设计实验报告

一、实验目的1. 了解阻尼机构的基本原理和设计方法。
2. 掌握阻尼系数对机构运动特性的影响。
3. 通过实验验证不同阻尼设计对机构性能的改善效果。
4. 培养实际工程中机构阻尼设计的实践能力。
二、实验原理阻尼机构是一种能够耗散能量、降低振动和冲击的机构。
在机械系统中,合理设计阻尼机构可以有效提高系统的稳定性和使用寿命。
本实验主要研究阻尼系数对机构运动特性的影响,包括振动幅度、频率和响应时间等。
三、实验设备1. 阻尼实验台:用于施加阻尼力。
2. 传感器:用于测量振动幅度、频率和响应时间等参数。
3. 数据采集与分析软件:用于实时记录和分析实验数据。
4. 机构原型:用于安装阻尼机构进行实验。
四、实验内容1. 实验一:阻尼系数对振动幅度的影响(1)安装阻尼机构在机构原型上。
(2)调整阻尼系数,分别设置低、中、高三个水平。
(3)在相同条件下,对每个阻尼系数进行多次实验,记录振动幅度。
(4)分析不同阻尼系数对振动幅度的影响。
2. 实验二:阻尼系数对振动频率的影响(1)安装阻尼机构在机构原型上。
(2)调整阻尼系数,分别设置低、中、高三个水平。
(3)在相同条件下,对每个阻尼系数进行多次实验,记录振动频率。
(4)分析不同阻尼系数对振动频率的影响。
3. 实验三:阻尼系数对响应时间的影响(1)安装阻尼机构在机构原型上。
(2)调整阻尼系数,分别设置低、中、高三个水平。
(3)在相同条件下,对每个阻尼系数进行多次实验,记录响应时间。
(4)分析不同阻尼系数对响应时间的影响。
五、实验结果与分析1. 实验一:阻尼系数对振动幅度的影响实验结果表明,随着阻尼系数的增加,振动幅度逐渐减小。
当阻尼系数达到一定程度时,振动幅度趋于稳定。
这表明增加阻尼系数可以有效降低机构的振动幅度。
2. 实验二:阻尼系数对振动频率的影响实验结果表明,随着阻尼系数的增加,振动频率逐渐降低。
当阻尼系数达到一定程度时,振动频率趋于稳定。
这表明增加阻尼系数可以有效降低机构的振动频率。
弹簧阻尼系统动力学模型adams仿真
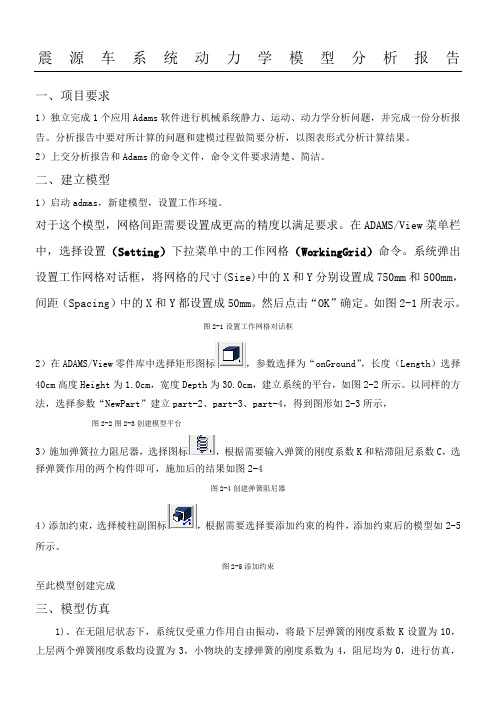
震源车系统动力学模型分析报告一、项目要求1)独立完成1个应用Adams软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。
分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。
2)上交分析报告和Adams的命令文件,命令文件要求清楚、简洁。
二、建立模型1)启动admas,新建模型,设置工作环境。
对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(WorkingGrid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成750mm和500mm,间距(Spacing)中的X和Y都设置成50mm。
然后点击“OK”确定。
如图2-1所表示。
图2-1设置工作网格对话框2)在ADAMS/View零件库中选择矩形图标,参数选择为“onGround”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。
以同样的方法,选择参数“NewPart”建立part-2、part-3、part-4,得到图形如2-3所示,图2-2图2-3创建模型平台3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4图2-4创建弹簧阻尼器4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。
图2-5添加约束至此模型创建完成三、模型仿真1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚度系数为4,阻尼均为0,进行仿真,点击图标,设置EndTime为5.0,StepSize为0.01,Steps为50,点击图标,开始仿真对所得数据进行分析。
选择物块的位移、速度、加速度与时间的图像如图3-1、3-2、3-3所示,经过傅里叶变换之后我们可以清楚地看到系统的各阶固有频率。
弹簧阻尼系统动力学模型ams仿真

弹簧阻尼系统动力学模型a m s仿真公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]震源车系统动力学模型分析报告一、项目要求1)独立完成1个应用Adams 软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。
分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。
2)上交分析报告和Adams 的命令文件,命令文件要求清楚、简洁。
1K 1C 2K 2C 3C 3K 3M 1M 2M二、建立模型1)启动admas ,新建模型,设置工作环境。
对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
图 2-1 设置工作网格对话框2)在ADAMS/View零件库中选择矩形图标,参数选择为“on Ground”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。
以同样的方法,选择参数“New Part”建立part-2、part-3、part-4,得到图形如2-3所示,图 2-2 图 2-3创建模型平台3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4图 2-4 创建弹簧阻尼器4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。
图2-5 添加约束至此模型创建完成三、模型仿真1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚度系数为4,阻尼均为0,进行仿真,点击图标,设置End Time为,StepSize为,Steps为50,点击图标,开始仿真对所得数据进行分析。
弹簧阻尼系统的数学模型
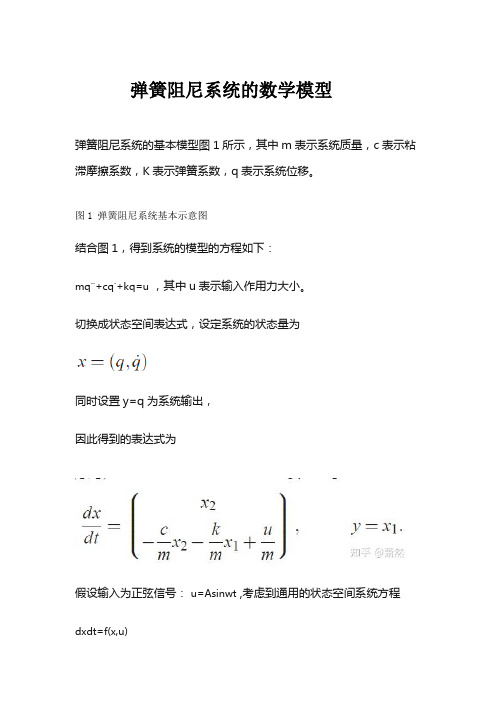
弹簧阻尼系统的数学模型弹簧阻尼系统的基本模型图1所示,其中m表示系统质量,c表示粘滞摩擦系数,K表示弹簧系数,q表示系统位移。
图1 弹簧阻尼系统基本示意图结合图1,得到系统的模型的方程如下:mq¨+cq˙+kq=u,其中u表示输入作用力大小。
切换成状态空间表达式,设定系统的状态量为同时设置y=q为系统输出,因此得到的表达式为假设输入为正弦信号:u=Asinwt ,考虑到通用的状态空间系统方程dxdt=f(x,u)采用欧拉积分的方法,考虑在t时刻的系统状态x,在极短的时间内h>0, 状态变化率时f(x,u)是个常量,在时刻t到时刻(t+h)内,x(t+h)=x(t)+hf(x(t),u(t))进行一些简答图形绘制绘制输入信号图:输入信号为正弦信号,给定相应的幅值和角频率,表示输入作用力的大小部分代码:t = 0:0.1:100;u = 20*sin(0.5*t);plot(t,u,'r','LineWidth',2);xlabel('Time[sec]');ylabel('Force [N]');绘制基于状态方程的系统响应曲线,根据状态方程,在输入作用力下,观察系统的输出,即位置与时间的关系。
由图可知,黑色的曲线,则是表示系统的响应,采用的是matlab自带的函数。
其他颜色则是测试欧拉积分的方法,观察系统的输出响应曲线,发现时间间隔h越小,跟踪效果越好。
ys,ts] = lsim(sys,u,t);hvec = [10.50.1]; clear x;for iter = 1:length(hvec)x(:,1) = [0; 0];h = hvec(iter);maxi(iter) = max(t)/h;for i = 1:maxi(iter);x(:,i+1) = x(:,i) + h*(A*x(:,i) + B*u(h/0.1*i));td(i,iter) = (i-1)*h;yd(i,iter) = C*x(:,i);endendfigure(1); clf; plot(t, u);xlabel('time [sec]');ylabel('F [N]');figure(2); clf; subplot(211); hold on;analh = plot(ts, ys, 'k-', 'LineWidth',AM_data_linewidth);simh = plot(...td(1:maxi(1),1), yd(1:maxi(1),1), 'g+--', ...td(1:maxi(2),2), yd(1:maxi(2),2), 'ro--', ...td(1:maxi(3),3), yd(1:maxi(3),3), 'b--', ...'MarkerSize', 4, 'LineWidth', AM_ref_linewidth ...);当系统的输入是单位阶跃响应时,也需要观察系统的阶跃响应曲线。
理论力学中的弹簧和阻尼器如何建模?

理论力学中的弹簧和阻尼器如何建模?在理论力学的领域中,弹簧和阻尼器是非常重要的元素,它们在各种物理系统的建模和分析中起着关键作用。
理解如何对弹簧和阻尼器进行准确建模,对于研究物体的运动、力学行为以及系统的稳定性等方面具有重要意义。
首先,让我们来谈谈弹簧。
弹簧是一种能够储存和释放弹性势能的元件。
在建模弹簧时,我们通常使用胡克定律,其表达式为 F = kx ,其中 F 是弹簧施加的力,k 是弹簧的劲度系数,x 是弹簧的伸长或压缩量。
这里的负号表示弹簧施加的力总是朝着恢复其原始长度的方向。
当考虑一个简单的弹簧连接两个物体的情况时,我们可以根据胡克定律来计算弹簧对物体施加的力。
例如,在一个水平方向上的弹簧系统中,如果弹簧的一端固定,另一端连接一个质量为 m 的物体,并且物体从平衡位置移动了 x 的距离,那么弹簧施加在物体上的力就是 kx 。
这个力将影响物体的运动状态。
在建模弹簧时,还需要考虑弹簧的质量。
在一些简单的模型中,我们可以忽略弹簧的质量,将其视为无质量的理想弹簧。
但在更精确的模型中,弹簧的质量可能会对系统的动态特性产生影响。
此时,我们需要使用更复杂的方法来考虑弹簧质量的分布和其对系统的作用。
接下来,我们再看看阻尼器。
阻尼器是一种能够消耗能量的元件,它的作用是减缓物体的运动。
阻尼器施加的力通常与物体的速度成正比,其表达式为 F = cv ,其中 c 是阻尼系数,v 是物体的速度。
阻尼器在实际系统中非常常见,比如汽车的减震器、机械系统中的摩擦阻尼等。
在建模阻尼器时,我们需要根据具体的情况确定阻尼系数 c 的值。
阻尼系数越大,阻尼器对物体运动的抑制作用就越强。
在一个包含弹簧和阻尼器的系统中,例如一个质量弹簧阻尼器系统,物体的运动方程可以通过牛顿第二定律来建立。
假设质量为 m 的物体连接在弹簧和阻尼器上,弹簧的劲度系数为 k ,阻尼系数为 c ,物体的位移为 x ,速度为 v ,则根据牛顿第二定律 F = ma ,我们可以得到:ma = kx cv这是一个二阶常系数线性微分方程,通过求解这个方程,我们可以得到物体的位移、速度和加速度随时间的变化规律,从而了解系统的动态行为。
弹簧-质量-阻尼系统的建模及控制系统设计说明书
分数: ___________任课教师签字:___________华北电力大学研究生结课作业学年学期:第一学年第一学期课程名称:线性系统理论学生姓名:学号:提交时间:2014.11.27目录1 研究背景及意义 (3)2 弹簧-质量-阻尼模型 (3)2.1 系统的建立 (3)2.1.1 系统传递函数的计算 (5)2.2 系统的能控能观性分析 (7)2.2.1 系统能控性分析 (8)2.2.2 系统能观性分析 (9)2.3 系统的稳定性分析 (10)2.3.1 反馈控制理论中的稳定性分析方法 (10)2.3.2 利用Matlab分析系统稳定性 (10)2.3.3 Simulink仿真结果 (12)2.4 系统的极点配置 (15)2.4.1 状态反馈法 (15)2.4.2 输出反馈法 (16)2.4.2 系统极点配置 (16)2.5系统的状态观测器 (18)2.6 利用离散的方法研究系统的特性 (20)2.6.1 离散化定义和方法 (20)2.6.2 零阶保持器 (21)2.6.3 一阶保持器 (24)2.6.4 双线性变换法 (26)3.总结 (28)4.参考文献 (28)弹簧-质量-阻尼系统的建模与控制系统设计1 研究背景及意义弹簧、阻尼器、质量块是组成机械系统的理想元件。
由它们组成的弹簧-质量-阻尼系统是最常见的机械振动系统,在生活中具有相当广泛的用途,缓冲器就是其中的一种。
缓冲装置是吸收和耗散过程产生能量的主要部件,其吸收耗散能量的能力大小直接关系到系统的安全与稳定。
缓冲器在生活中处处可见,例如我们的汽车减震装置和用来消耗碰撞能量的缓冲器,其缓冲系统的性能直接影响着汽车的稳定与驾驶员安全;另外,天宫一号在太空实现交会对接时缓冲系统的稳定与否直接影响着交会对接的成功。
因此,对弹簧-质量-阻尼系统的研究有着非常深的现实意义。
2 弹簧-质量-阻尼模型数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三 弹簧阻尼器机构的动力学模拟
一、实验目的
1.掌握多体动力学分析软件ADAMS 中实体建模方法;
2.掌握ADAMS 中施加约束和驱动的方法;
3.计算出弹簧阻尼机构运动时,弹簧振子的位移、速度、加速度和弹簧位移与弹簧力的对应关系。
二、实验设备和工具
1.ADAMS 软件;
2.CAD/CAM 机房。
三、实验原理
按照弹簧阻尼器机构的实际工况,在软件中建立相应的几何、约束及驱动模型,即按照弹簧阻尼器机构的实际尺寸,建立弹簧、阻尼器和质量块的几何实体模型;质量块的运动为上下作自由衰减运动,可以理论简化为在质量块与大地之间建立平动副,弹簧、阻尼器共同连接到连接大地和质量块上;然后利用计算机进行动力学模拟,从而可以求得质量块在弹簧阻尼器连接下任何时间、任何位置所对应的位移、速度加速度,以及弹簧中位移和弹性恢复力之间的对应关系等一系列参数,变换弹簧、阻尼器和质量块的参数可以进行多次不同状态下的模拟。
四、实验步骤
1.问题描述 图3-1为弹簧阻尼器机构简图,M 为振子,质量为187.224kg ;弹簧刚度K =5N/mm ,阻尼器阻尼为C =0.05N/mm ,弹簧空载长度为400mm ,求当弹簧阻尼机构振动时,铰接点A 处的支撑力。
2. 启动
ADAMS
M :187.224Kg
K :5.0N/mm
C :0.05N-sec/mm
L0:400mm
F0:0
图3-1 弹簧阻尼器机构示意图
2.1 运行ADAMS2005,在欢迎界面中,选择Create a new model, Model name 输入spring_mass;
2.2 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units (单位)文本框中是MMKS(mm,kg,N,s,deg)。
3. 建立几何模型
3.1单击F4显示坐标窗口;
3.2在主工具箱中选择Box 工具按钮建立一质量块,用默认尺寸即可;
3.3 在屏幕任意位置点击鼠标创建质量块;
3.4 右键点击质量块,选择part_2,然后选择Rename,更名为mass;
3.5 右键点击质量块,选择mass,然后选择Modify。
在打开的对话框中修改Define mass by 项为User Input,在Mass栏输入187.224;
3.6 选择右视图按钮查看质量块的位置,进行调整栅格位于质量块的中心。
选择Edit菜单下的Move项,在对话框中选择Relocate the项为Part,右键点击右侧文本框选择Part,出现Guesses然后选择mass ,如图3-2所示。
图3-2 选择移动质量块
3.7 在Translate下方的数字栏中输入-100,或者输入100再单击前面的按钮,如图3-3所示;
图3-3 移动对话框
3.8 设置完毕后,单击Z 轴方向按钮,使质量块中心位于工作栅格位置,选择正视按钮,显示栅格便于建模;
4. 施加运动副
为了确保质量块的运动只沿Y 轴移动,添加一平动副。
选择工具箱中的平动副按钮,选择质量块和大地为对象,Y 轴为运动方向。
如图3-4所示。
5. 设置弹簧和阻尼器参数
5.1
选择工具栏中的弹簧阻尼器按钮
,设置参数:K=ON ,K=5.0;C=ON ,C=0.05;
5.2 设置完毕,选择质量块中心点,以及点击沿Y 轴向上400mm 的位置,即相当于与大地建立弹簧连接,如图3-5所示;
图3-4 添加平动副
图3-5 建立弹簧阻尼器模型
5.3 为了确定弹簧在空载时长度为400mm,选择菜单栏中Tools菜单中的Measure distance,在测量对话框中First Marker Name栏单击鼠标右键,选择position 然后选择pick,选择质量块的中心点mass.cm,在second Marker Name栏单击鼠标右键,选择position 然后选择pick,选择弹簧的上顶点ground.MARKER_5;
5.4 设置完毕,单击OK按钮。
测量信息窗口如图3-6,Y轴距离为-400mm。
图3-6 测量信息窗口
6. 对弹簧阻尼器机构仿真分析
6.1 测量静平衡时弹簧力的大小,选择工具箱中的仿真按钮,选择工具箱下侧的计算静平衡按钮,计算成功会出现提示。
6.2 计算完毕单击返回按钮,右键点击弹簧选择spring_1,然后选择Measure,在打开的测量对话框中Characteristic选择force,在Measure Name 栏输入spring_force,单击OK按纽,建立一测量力的窗口。
为了只测量力的大小,在测量窗口内单击鼠标右键并选择Measure modify,在修改力函数对话框中加上绝对值函数ABS(),如图3-7所示;
6.3 根据弹簧力测量曲线,起始位置即静平衡时弹簧力为1836N ,即质量块的重力:18
7.224kg*9806.65mm/s 2(=1836.04N)。
测量曲线如图3-8所示;
6.4 继续测量弹簧的变形曲线。
右键点击弹簧选择spring_1,然后选择Measure ,在打开的测量对话框中Measure name 输入spring_displace, Characteristic 选择Deformation ,建立空白的位移测量窗口;
6.5 选择工具箱中的仿真按钮,设置仿真时间End Time 为2,Steps 为50,开始仿真,位移曲线如图3-9所示;
图3-7 修改测量力函数
图3-8 弹簧力测量曲线
6.6 在力测量曲线窗口空白处单击鼠标右键,选择plot: scht1---Transfer to full plot ,切换到ADAMS/Postprocessor 窗口。
6.7 单击clear plot 按钮清除窗口内的曲线。
在Result set 选项中选择spring_force 下,选择component 下的Q 分量。
如图3-10所示;
6.8 在Independent Axis 项选择Data 项,在弹出的选择窗口spring_displace ,在component 中选择Q ,选择完毕单击OK 如图3-11。
6.9 单击Add curves 按钮添加新选择的曲线,即以X 轴为Spring_displace ,Y 轴为spring_force,如图3-12。
图3-9 弹簧变形曲线
图3-10 测量曲线参数设置
图3-11 选择Independent Axis
图3-12 力与位移的关系曲线
五、思考题
1.在ADAMS中建立的弹簧阻尼器模型图3-5和图3-1给出的弹簧阻尼器模型存在不同吗,对结果会不会产生影响?
2.请尝试变换弹簧、阻尼器和质量块的参数,进行模拟?
3.变换阻尼器的参数,进行模拟,当阻尼器的值设置大到一定程度后,弹簧阻尼器机构模拟时会产生什么情况?
六、实验报告
按照以下要求递交实验报告
1.建模要求
把建模完成图抓图1幅,粘贴于实验报告中,并对作图过程作简要叙述。
2. 施加运动副和驱动要求
把弹簧阻尼器运动机构施加运动副和驱动完成的图抓图1幅,粘贴于实验报告中,并对施加的运动副和驱动作简要叙述。
3. 模拟结果要求
把质量块的运动位移、速度、加速度和弹簧中位移和弹性恢复力之间的对应关系模拟出来,分别抓图1幅,粘贴于实验报告中,并对模拟结果作简要的叙述。