基于两级模糊控制城市交叉口的设计与仿真
基于粒子群的城市交通信号两级模糊控制
2 0 1 3 年 3 月
交
通
科
技
与
经
济
Vo L 1 5 . No . 2
Ma r ., 2 01 3
Te c h n o l o g y & Ec o n o my i n Ar e a s o f Co mmu n i c a t i o n s
信 比、 周 期 随交 通 状 况 而 自适 应 变 化 , 并 采 用 粒 子 群 算 法 对 模 糊 控 制 器 的 隶 属 度 函 数 进 行 优 化 。仿 真 结 果 表 明 , 该
系统能有效地提高交叉 口的通行能力 , 减少车 ; 平均延误
Ab s t r a c t : Ac c o r d i n g t o t h e c h a r a c t e r i s t i c s o f u r b a n t r a f f i c f l o w ,a t wo — s t a g e f u z z y c o n t r o l l e r i s d e s i g n e d t o s o l v e t r a f f i c s i g n a l c o n t r o 1 ,wh i c h r e d u c e s t h e n u mb e r o f f u z z y r u l e s e f f e c t i v e l y .W i t h t h e t r a f f i c s i t u a t i o n c h a n g e d,t h e p h a s e o r d e r ,t h e r a t i o o f g r e e n s i g n a l a n d t h e c y c l e a d a p t i v e l y c h a n g e . To mo d i f y t h e me mb e r s h i p f u n c t i o n s o f f u z z y c o n t r o l l e r ,a t e c h n i q u e b y u s i n g p a r t i c l e s wa r m o p t i mi z a t i o n a l g o r i t h m i s p r o p o s e d . Th e r e s u l t i n d i c a t e s t h a t t h i s s y s t e m c a n e f f e c t i v e l y i mp r o v e t r a f f i c c a p a c i t y a t t h e i n t e r s e c t i o n s a n d d e c r e a s e t h e a v e r a g e a u t o mo b i l e d e l a y . Ke y wo r d s :t r a f f i c s i g n a l ;f u z z y c o n t r o l ;p a r t i c l e s wa r m o p t i mi z a t i o n;a v e r a g e d e l a y
一种城市单路口交通两级模糊控制方法

第 1卷 8
V
电子设 计 工程
Elcr n c De i n En i e ig e to i sg gne rn
21 0 0年 1月
Jn 2 1 a.00
一
种城市单路 口交通两级模糊控制方 法
卫 小伟 1 , 2,常 博 ・
3 长 安 大 学 信 息 工 程 学院 .陕 西 西 安 7 0 6 ) . 10 4
( . 西 交通 职 业 技 术 学 院 陕 西 西安 7 0 1 ; . 安 大 学 电 子 与 控 制 工 程 学 院 ,陕 西 西 安 7 0 6 ; 1陕 10 8 2 长 1 0 4
摘 要 : 据 单 路 口 4个 方 向 车 流 信 息 , 出 一种 单 路 口 交 通 两级 模 糊 控 制 方 法 , 用 模 糊 控 制 技 术 , 需 建 立 精 确 的 依 提 采 无 数 学模 型 , 两相 位 的 交 叉路 口 , 一 种 基 于 车辆 等 待 长 度 的 单 点 信 号 交叉 口 交通 实 时模 糊控 制 方 法 。 据 城 市 交 通 对 是 根 实 际 状 况 , 考 虑 每 个 相 位 的 关 键 车 流 和 非 关键 车 流 的 车 辆 到 达 交 叉 口信 息 的 基 础 上 , 出更 有 效 的 单 路 口 交通 实 在 提 时 模 糊 控 制 方 法 . 对 该控 制 器进 行 仿 真 研 究 , 真 结 果 达 到 预 期 要 求 并 仿 关 键 词 :交通 网络 :单 路 口 :两级 模 糊 控 制 中 图分 类号 : 4 1 U 9 文 献 标 识 码 : A 文 章 编 号 :6 4 6 3 (0 0 0 — 0 1O 17 — 2 62 1 )1 0 8 一 3
单交叉口交通信号的两级模糊控制
一la X13 5 N 3 压 } N9 50
N } W 3o 5
主程序:0 1234
综上所述, 本人通过对数控车削端面矩形
一 Iwen llM CA { 一 }A10 I g Y c# T JA NPA) 一.." d 转、 25转 分 }I . 转4 / }定 一位
FN-} -lo
N2 0
指令有G92, G76, G32指令 本文编制车削
相位优先级模糊控制器输人量是各红幻 相
图2
常称Pappis法则,该方 但 法只是 一种理想 化的 交 号控制方法。本文 通信 针对一个典型的城
市 道路交叉口 将Pappis法的在原有的 , 基础上
加以改进、完善, 以适应实际的需要。
3 控制方案
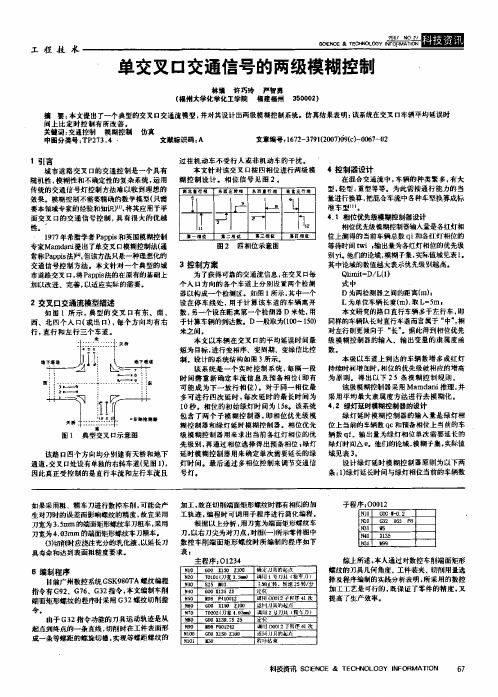
为了 获得可靠的交通流信息, 在交叉口 每 个入口 方向的各个车道上分别设置两个检测 器以构成一个检侧区. 如图1所示 其中 一个
包含了两个子模糊控制器, 即相位优先级模
川 典型交叉口示意图 图 1
方
糊控制器和绿灯延时摸糊控制器。相位优先
级模糊控制器用来求出当前各红灯相位的优
绿灯延时模糊控制器的输入量是 绿灯相 位上当前 辆数qc 和预备相位上当前 的车 的车 辆数q士 输出 绿灯相位单次需要延 。 量为 长的
绿灯时间4 e。他们的论域, 模糊子集, 实叉口的平均延误时间最
级模糊控制器的 输入、输出 变量的隶属度函
数。
短为目 进行变相序、 标, 变周期、 绿信比 变 控
制。设计的系统结构如图3 所示。 该系统是一个实时控制系统 , 每隔一段 时 间需重新确定车流信息及预备相位( 即有 可能成为下一放行相位》 。对于同一相位最 多可进行四次延时 , 每次延时的最长时间为
城市交通单交叉口两级模糊控制器的设计

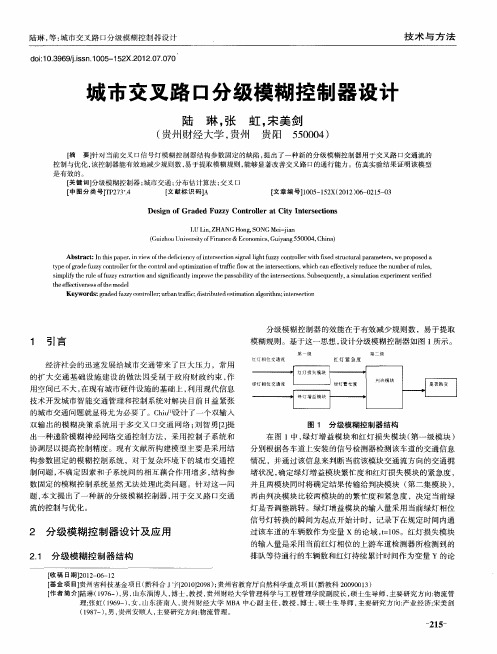
2 相序 选择模 块的设 计
该 模块 包括 东西相 位选 择模 块 、南 北相位 选择
法 既优化 了信 号灯 的相序 ,又有效 地避 免 了其他 自
适应 控制 器相位 无序 轮换 容 易使司机 迷 惑的缺 点 。 本 文 设 计 的控 制器 采 用 线 圈检 测 器 检 测 车流 量 ,线 圈检 测器 是现在 比较 成 熟的车 流量检 测器 , 通 过在 路 面 埋 设 感 应 线 圈 检 测 车辆 到达 率和 排 队 车辆数 ,取检 测长 度为 10 m,为 了检测 准确 ,要 5
的基本 论域 为 ( ,6 。 O ) 的论 域 { ,3 ,9 2 5 8 1 4 0 ,6 ,1 ,1 ,1 ,2 ,2 ,
2 , 0; 7 3 )
r 的论域 { ,01 .,03 .,05 ., s 0 .,02 .,04 .,0 6
07 ., 09 1 ) .,O8 ., . : 0
() 时 级 输 出 隶 属 函 数 d配
图3
_] 一 _ ]
级 决定 以哪种 相序 放行 。第 二级决 定放行 的各 相位
的放 行 时间 ,其 输入 为要放 行 相位 的排 队长度 和车 辆 到达率 。2级模 糊控 制器 的结构 图如 图 2所 示 ,
可见 其为 闭环控 制 。
L 一广
]
( )东西直行 a
土L LL
l } 号
灯
南 方 南 相 l北 北 向l北 位 南 相
模
块
i — 择 块『 疆 i 1选 模 季 蕊
图 2 两 级 模 糊 控 制 器 的 结 构 图
在 一个 周期 内每个 相位 只能放 行 一次 ,而 且必 须 占用连 续 的绿灯 时 间,即在 1 个周 期 内 1 个相 位 只 给 1 绿灯 ,但是 绿灯 持续 时间 可 以改变 ,该方 次
城市交叉路口分级模糊控制器设计
的城 市 交 通 问题 就 显 得 尤 为 必 要 了 。C if 计 了一 个 双 输 入 hu设 - 双 输 出 的 模 糊 决 策 系 统 用 于 多交 叉 口交 通 网 络 ; 智 勇 [] 刘 2提
模 糊 规 则 。基 于 这 一 思 想 , 计 分 级模 糊 控 制 器 如 图 1 示 。 设 所
分级 模 糊 控制 器 的 效 能 在 于有 效 减少 规 则 数 ,易 于 提 取
1 引言
经济社会 的迅速发展给城市交通带来 了巨大压力 ,常用 的扩 大交通基础设 施建设 的做 法因受制 于政府财政约 束 , 作 用空 间已不大 , 在现有城市硬件设施的基础上 , 利用 现代 信息 技术开发城市智能交通管理和控制系统对解决 目前 E益紧张 t
( uz o nv r t o Fn n e c n m c, uy n 5 0 0 , hn ) G i uU i s y f ia c &E o o isG ia g 5 0 4 C ia h ei
Absr c : nt i p p r i iw f h e c e c f n e s c in sg l ih f z yc n r l r t ix d sr c u a p r me e wep o o e t a t I h s a e , nv e o t ed f in yo i tr e t ina l t u z o tol wi i o g e hf e tu t r l a a t ̄, r p s da tp f r d u z o to lrfr h o to a d o tmi ai no tafcf w t h n e s c in , i h c n ef c iey r d et en mb r f l s y eo g a ef z yc n r l o t ec n r l e n p i z t f r fi l a t ei t r e to s wh c a fe tv l uc h u e o r e , o o e u smp i er l f u z x r ci n a ds g i c n l mp v a s b lt f h t re t n . u s q e t , mu a in e p rme t e i e i l yt eo f z ye t t n i f a t i r e t p s a ii o t ei e s ci s S b e u n l a s l t x e i n rf d f h u a o n i y o he y n o y i o v i t e f e ie e s ft emo e h f t ns ̄ h dl ee v Ke wo ds g a e zyc n r l r u b n taf ; iti u e si t na g rt m;n e s ci n y r : r d df z o tol ; r a f c d srb td e t u e ri ma i o i o l h i t re t o
城市道路新型连续流交叉口的设计及仿真

122交通信息与安全2013年2期第31卷总175期城市道路新型连续流交叉口的设计及仿真*刘秋晨张轮杨文臣张磊董德存(同济大学交通运输工程学院上海201804)摘要针对传统平面交叉口左转车流引起的车流不连续和运行效率低等不足,提出1种城市道路新型连续流交叉口。
阐述了连续流交叉口的几何物理模型,从交通空间设计、交通组织设计、交通控制设计3个方面研究连续流交叉口的设计方法,并采用V i ssi m仿真对传统平面交叉口和连续流交叉E l的设计方案进行交通效用评价。
结合国内城市道路交叉口的特性,分析连续流交叉口在国内适用性。
研究结果表明:连续流交叉口能有效改善交叉El的交通运行效益,适用于我国城市近郊道路交叉口的改造与设计。
关键词交通设计;连续流交叉口;仿真校准;V i ss i m中图分类号:U491文献标志码:A doi:10.3963/j.i s sn1674—4861.2013.02.0270引言传统平面交叉口的交通问题主要由左转车流与对向直行车流产生的冲突引起,采取禁左、设置专用左转相位等交通组织方法不能同时从空间和时问上有效消除冲突点,平面交叉口是城市道路通行能力的瓶颈口]。
连续流交叉口将左转车辆与对向直行车辆的冲突点提前,在主交叉口消除了左转车辆引起的冲突,通过路中交叉口和主交叉口信号灯的协调控制,使得车辆能连续通过2个交叉口,减少车辆延误,提高了交叉口的通行能力。
自从1960年墨西哥建成世界上第1个连续流交叉口,连续流交叉口在国外已取得了许多有价值的研究应用成果[2。
3]。
相比传统交叉口.虽然连续流交叉口建设费用贵2~3倍,但在减少车均延误、排队长度和提高通行能力等方面有显著的成效。
然而受国内城市道路空间不足及混合交通流等局限性影响,国内对连续流交叉口设计的研究甚少。
根据国外连续流交叉口的成功案例,针对传统平面交叉口设计存在的不足,本文提出1种城市道路新型连续流交叉E l,其立足国外连续流交叉口设计理念与设计原则,结合国内城市道路交叉口的特性,研究面向国内应用的连续流交叉口的设计方法,包括交通空间设计、交通组织设计和交通控制设计;并设计多种交通状态下的交通仿真场景,采用V i ssi m仿真对所提出的设计方案进行效用评价;最后,结合连续流交叉口的应用边界,定性分析其在国内的适用性。
基于模糊控制的智能交通系统设计与实现

基于模糊控制的智能交通系统设计与实现第一章前言随着现代交通的日益发展,交通问题也变得日益突出。
传统的交通控制方式已经不能够满足现代交通的需求,因此需要新的交通控制方式。
智能交通系统作为新型的交通控制方式,正在得到越来越广泛的应用。
本文将介绍基于模糊控制的智能交通系统的设计与实现。
第二章智能交通系统的概述智能交通系统是一种交通信息化技术,是指在交通领域内应用信息技术,使交通系统具有自我感知、自我调节、自我协调、自我教育和自我管理的能力。
智能交通系统通常包括道路交通控制、智能车辆、通信网络、信息管理等部分。
智能交通系统的主要目标是提高路网容量和道路通行效率,减少交通事故和交通拥堵。
第三章模糊控制的原理与方法模糊控制是一种基于模糊集合理论的控制方法。
与传统的精确数学模型不同,模糊控制可以应对不确定性和复杂性问题。
模糊控制的基本原理是将模糊变量输入系统,通过模糊推理得到控制变量,从而实现对系统的控制。
模糊控制的方法主要包括模糊集合的定义、模糊规则的设计和模糊推理机制的实现。
模糊集合是指对某一变量进行模糊化,将其划分为若干模糊集合。
模糊规则是一组形如“IF A THEN B”的语句,其中A和B均为模糊集合。
模糊推理机制主要分为模糊推理和模糊控制两个阶段。
模糊推理是指将输入的模糊集合和模糊规则进行匹配,得到匹配度最高的模糊规则。
模糊控制是指根据匹配到的模糊规则和输出的控制变量,对系统进行控制。
第四章基于模糊控制的智能交通系统设计本文设计的基于模糊控制的智能交通系统主要包括车辆导航模块、交通信号控制模块、智能安全监测模块和交通管理中心模块。
车辆导航模块主要为车辆提供导航服务,通过GPS定位、交通路况分析等方式,为车辆提供最佳路线规划。
交通信号控制模块主要负责交通信号的控制,通过模糊控制方法,对红绿灯的时序进行控制,以提高路网容量和道路通行效率。
智能安全监测模块主要对路口行人、车辆、交通标志等情况进行检测和监测,及时发现交通事故和交通违法行为,提高交通安全性。
基于模糊控制的双闭环系统及仿真分析

( 1 )
额 定 励磁下 的感 应 电动 势 和电磁 转矩 分别 为 :
E:
=
( 2 )
( 3 )
图2 H桥 双 极 性 控 制 原 理 图
忽 略粘 性 摩 擦 及 弹 性 转 矩 , 电动 机 轴 上 动 力 学方程 为 :
五= G D2 d n
一
( 4 )
V V AN G L i a n g .SU N S h o u - j u a n
( 1 . 中国矿业 大学 信息与 电气 工程 学院 ,徐州 2 2 1 0 0 8 ;2 . 江苏 师范大学 电气工程及 自动 化学 院,徐州 2 2 1 0 0 8 ) 搞 耍; 采 用模糊控制 实现直流 电机 双环调速 。文中首先建立 了直流 电机的数学 模型 , 分析 了转速和 电 流双闭环控制 的必要性 ,并 对转速环模糊 控制器设计 。提 出了模糊 P D 并联积分 的控 制器 结 构 ,完善 了P I D 控制器的性 能 , 提 高了系统的控制 精度。最后应用 M A T L A B /S I M U L I N K 工具 箱 , 实现 了直流 电机 模糊控制 系统 的计算机仿 真。仿真结 果表明 , 该方法 比经典P I D 控 制器具 有更快的动态响应和更高的调节精度。 关键词 :模糊控制 ;双环调速 ;s l m u l l n k 仿真 中圈分类号 :T M3 3 文献标识码 :A
0 引言
由于 直流 电动 机 具有 良好 的起 、制 动性 能 ,能 实现大 范 围 内平 滑 调速 ,故煤 矿 电机 车仍 采用 直 流 电机 牵 引。 由于 直 流 电机 系统 本身 的 非 线性 ,P I 调 节器 难 以保持 良好 的控 制性 能 。考 虑 到模 糊控 制 实 现 的简 易性 和 快 速性 ,又 不 依赖 于 对 象 的模 型 , 因
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于两级模糊控制城市交叉口的设计与仿真3许伦辉 刘细平(韶关学院 韶关512005) (江西理工大学 赣州341000)摘 要 针对城市单交叉口存在关键车流与非关键车流的特点,提出了一种单交叉口两级模糊控制的方法,设计了单交叉路口的两级模糊控制器,并给出了控制算法,仿真结果表明,本文所设计的基于两级模糊控制器的交叉路口可使通过的车辆的总延误时间大幅度地减少,适用于多车流的单交叉路口。
关键词 模糊控制;交叉口;关键车流Abstract :A cco rding to the featu re that there are tw o k inds of traffic flow including the key flow and the subo rdinate flow of u rban in tersecti on s ,in th is paper ,the au tho rs p ropo se a m ethod of tw o 2layer fuzzy con tro l abou t a single in tersecti on ,design the tw o 2layer fuzzy con tro ller ,and p resen t a con tro lling algo rithm .R esu lts of si m u lati on show that the to tal delay ti m e of all the veh icles th rough u rban in tersecti on can be greatly reduced by u sing the fuzzy con tro ller ,w h ich can be app lied to the single in tersecti on w ith m u lti 2flow .Key words :fuzzy con tro l ;in tersecti on ;key flow收稿日期:2004206207 3国家自然科学基金资助项目(60064001);江西省自然科学基金资助项目(0011006);广东省自然科学基金资助项目(20011707)0 前 言在城市交通控制系统中,采用传统控制方法进行交通信号控制的做法较多,也取得了一定的成效。
但在进一步处理复杂时变的现代城市交通状况时不够理想,近年来国内外学者基于模糊控制理论对于复杂系统在定性建模上的优点,把模糊逻辑控制应用到交通信号控制中,大部分研究是致力于把模糊控制应用到简单的交通状态中,对城市交通情况作了很多简化,并不适合实际。
随着模糊控制、神经网络以及遗传算法等智能控制学科的兴起,特别是人工智能在交通控制中的应用,给交通控制注入了新的活力,其仿真结果显示出明显的优越性[1~3]。
3 结束语作业区通行能力的影响因素很多也很复杂,由于条件的限制,在实际中往往很难就某一具体因素展开研究。
利用微观仿真软件对道路上的交通流进行研究,在国外进行了较长时间,应用很广。
在中国,由于受软硬件条件的限制,长期以来一直没有获得广泛应用。
本文利用微观仿真系统V issi m 软件,对影响高速公路作业区通行能力的几个主要因素进行了仿真分析,得出了它们对作业区通行能力值的影响趋势以及影响程度的大小排序,并发现作业区限速要根据高速公路的设计车速以及道路上的大车率来确定,太低的限速将大大降低作业区的通行能力。
这些结论可以为作业区通行能力的研究提供有益的参考。
参考文献1 K i m T ,L ovell D J ,Paracha J .A new m ethodo logyto esti m ate capacity fo r freew ay w o rk zones .P roc .,2001T ran spo rtati onR esearchBoardA nnualM eeting ,W ash ington ,D .C .20012 D udek C L ,R ichards S H .(1982)T raffic capacityth rough u rban freew ay w o rk zones in T exas.T ran spo rtati on R esearch R eco rd 869,1982.14~183 R ichard S H ,D udek C L .I m 2p lem en tati on of w o rk 2zone speed con tro l m easu res.T ran sp .R es.R ec .1086,T ran spo rtati on R esearch Board ,W ash ington ,D .C .,1986.36~421 采用两级模糊控制器的交通信号系统 设十字路口的进口道路均为单车道,有4股车流,如图1所示,其中G 1和G 2分别为有通行权方向路口两车道上两股车流经过停车线之前到达的车辆数;R 1和R 2分别为无通行权方向两股车流在停车线后面排队等待的车辆数。
G 1和G 2两股车流越过停车线后,将分成右转、直行、左转3股不同方向的车流。
假设G m ax =m ax {G 1,G 2},为有通行权方向的关键车流;R m ax =m ax {R 1,R 2},为无通行权方向的关键车流;G m in =m in {G 1,G 2},为有通行权方向的非关键车流;R m in =m in {R 1,R 2},为无通行权方向的非关键车流.图1 单交叉口的两级模糊控制系统若不考虑非关键车流对系统的影响,就相当于利用Papp is 法建立G m ax 和R m ax 的模糊控制器,但是该法只考虑了两个不同相位的关键车流所起的作用,而忽略了两个不同相位中非关键车流对信号配时的影响作用:由此可以看出,该方法不能保证所有通过交叉路口的车辆总延误时间最小。
由图1和交通规则所知,有通行权的非关键车流G m in 的右转车流不会对关键车流G m ax 的直行产生太大的影响;而G m in 左转车流对有通行权的关键车流G m ax 的直行会产生影响;且G m in 的直行车流对G m ax 的左转车流也会产生影响。
因而,在实施单路口交通信号灯的模糊控制规则研究过程中,除了考虑G m ax 和R m ax 的作用之外,还应考虑G m in 对系统的影响作用,这也是对Papp is 法的局限性需要进行改进的方面。
2 两级模糊控制的基本思想首先选择对单交叉路口控制系统控制效果影响最大的两相位的关键车流的车辆到达数和绿灯延长时间作为1级变量,由他们组成1级模糊控制器,选择两相位的非关键车流的车辆到达数和绿灯延长时间修正量作为2级变量,组成2级模糊控制器。
根据检测器检测到的各方向信息,对两相的关键车流的车辆到达情况实施模糊控制,即经过模糊化、模糊控制规则、模糊判决得到有通行权的绿灯延长时间初值t 1,对两相的非关键车流实施模糊控制,得到绿灯延长时间的修正时间∃t ,从而得到控制策略即绿灯延长的时间T ,即由绿灯基本延长时间t 1和绿灯附加延长时间∃t 构成:其中绿灯基本延长时间由Papp is 法确定,即由T ×G m ax ×R m ax 构成的论域上的模糊关系确定,绿灯附加延长时间∃t 由G m in 确定,系统最终的控制策略为T =t 1+∃t当t1+∃t ≤1010当t 1+∃t >10(1) 单路口模糊控制系统结构如图2所示。
图2 单路口模糊控制系统结构3 1级模糊控制器的设计根据经验,对单交叉路口的1级模糊控制算法可描述为:步骤1。
从关键车流开始分别制定各干道和支线的最大、最小绿灯时间t i m ax 、t i m in ;步骤2。
先给关键车流以最短绿灯时间,G i =∃G =15s ;步骤3。
测得放行车道上的车队长度即干道车队长度L ;步骤4。
若L 为0,或L <v (v >0),或累积绿灯时间G i =G i m ax ,则将绿灯转到下一相位,回到步骤1,否则继续;步骤5。
根据L 值的大小来确定绿灯延长时间t ,这可以根据交警的经验及交叉口的几何形状建立模糊控制规则。
若L 小,则绿灯时间延长较少,若L 较大,则绿灯时间延长较多,若:t i +t >t i m ax ,则t =t i m ax -t i ,否则t i +t →t i ,回到步骤3。
其中队长是用交叉口停止线前相隔一定距离(通常为80~100m )的两检测器之间的车辆数来描述的。
用队长来表示交通需求可用下述方法建立模糊控制规则,将测得的队长L 看作模糊变量,有7个语言值,很多、多、较多、适中、较少、少、很少。
相对应地可以由此定义7个模糊子集N 1,N 2,…,N 7.论域上各元素隶属于这7个模糊子集的隶属度如表1所列。
绿灯基本延长时间t同样被看作模糊变量,其论域为t={3,7,11,15,19,23,27,31,15} 取7个语言值:t1(很多),t2(多),t3(较多),t4 (适中),t5(较少),t6(少),t7(很少),赋值表如表2所列。
若L=N i,则t=t i,i=1, (7)根据模糊理论知道,一个完整语言控制策略是由很多不同的语言控制策略所组成的,下式所示的单输入单输出语言控制策略就是由7条语言控制策略所组成,每条控制策略可用下面模糊关表1 车流量模糊子集语言值隶属度L 辆13579111315171921N1很多 0 0 0 0 0 0 0 0.2 0.6 0.9 1.0 N2多0000000.20.71.00.70.2 N3较多000000.20.81.00.80.20 N4适中0000.10.61.00.60.1000 N5较少00.20.81.00.80.200000 N6少0.20.71.00.70.2000000 N7很少1.00.90.60.20000000表2 语言变量t模糊子集语言值t s3711151923273135t1很多 0 0 0 0 0 0 0.3 0.8 1.0t2多000000.20.61.00.7t3较多00000.20.61.00.70.3t4适中000.10.81.00.80.100t5较少0.30.71.00.60.20000t6少0.71.00.60.200000t7很少1.00.80.3000000系矩阵表示:R i=N i×t i,i=1,…,7式中:N i为11×1列向量;t i为1×9行向量。
总的一组控制策略的模糊矩阵为各个模糊关系矩阵求“并”。