第五讲平面控制网数据处理
《控制网平差》课件

EDMUND软件
EDMUND软件是一款功能 强大的控制网平差软件,适 用于各种类型的控制网,包 括GPS网、测角网、测距网
等。
1
该软件支持多种平差模型和 方法,如最小二乘法、卡尔 曼滤波等,以满足不同数据
处理和分析的需求。
EDMUND软件提供了友好 的用户界面和灵活的数据输 入输出功能,方便用户进行 数据导入和导出。
该软件还支持多种数据格式 ,包括DAT、ASC、TXT等 ,方便用户进行数据交换和 处理。
ORBIT软件
01
ORBIT软件是一款专业的控制网平差软件,具有强大的数据处理ห้องสมุดไป่ตู้分 析功能。
02
间接平差
总结词
通过建立误差方程求解未知数的方法。
详细描述
间接平差是通过建立误差方程来求解未知数的方法。误差方程是将观测值与未知数之间的误差表示为 数学方程,然后通过解这个方程来得到未知数的值。这种方法适用于具有较少约束条件的控制网。
直接平差
总结词
直接利用观测值和未知数之间的关系进 行平差的方法。
满足各种工程需要
在各种工程建设中,需要高精度的测 量数据来保证工程的质量和安全。控 制网平差能够提供高精度的测量成果 ,满足各种工程需要。
控制网平差的发展历程
经典控制网平差
传统的控制网平差方法主要基于最小二乘原理,通过解线性方程组来求解未知参数。这种方法适用于简单的测量 模型和数据量较小的情形。
现代控制网平差
该软件支持多种类型的控制网,包括GPS网、测角网、测距网等,并 提供了丰富的数据处理和分析工具。
03
平面控制测量操作方法

平面控制测量操作方法
平面控制测量是指通过一系列控制测量点来保证建筑物或道路等建筑结构的平面度、垂直度和水平度。
下面是平面控制测量的操作方法:
1.测量前,应调查控制点周围的地形,确定测量区域的边界。
2.根据需要建立控制测量基准点,确定各控制测量点的坐标,测量点可采用钉桩、地标等方式标定。
3.确定控制测量点的观测方位,选择适合的观测仪器进行测量,如全站仪、自动水平仪等。
4.按照先后顺序进行观测,遵守精密测量的操作规程,记录仪器刻度值或读取数据,注明测量点的编号和观测时间。
5.计算各控制测量点的坐标,进行误差调整和精度评定。
根据需要,制作控制测量图,标明建筑物或道路等建筑结构的平面度、垂直度和水平度。
6.在建筑施工过程中,按照控制测量图进行实际测量并进行调整,确保建筑结构的准确平面度、垂直度和水平度。
7.最后,进行控制测量成果的归档和保存,在下次测量前进行检查和验证。
CPIII平面控制测量方法及程序
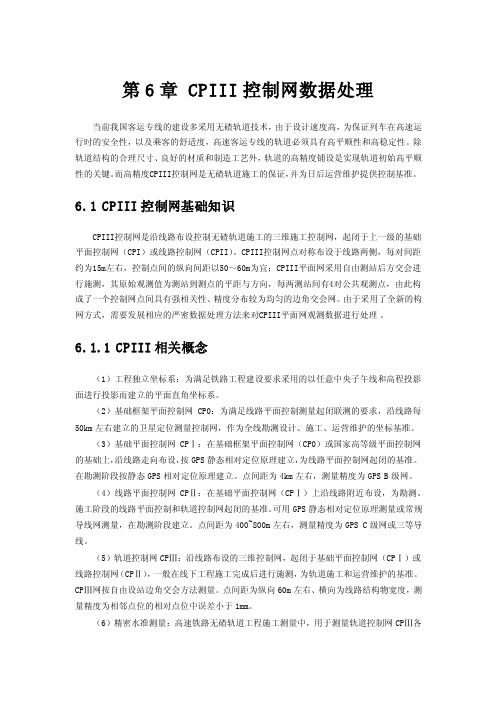
第6章 CPIII控制网数据处理当前我国客运专线的建设多采用无碴轨道技术,由于设计速度高,为保证列车在高速运行时的安全性,以及乘客的舒适度,高速客运专线的轨道必须具有高平顺性和高稳定性。
除轨道结构的合理尺寸、良好的材质和制造工艺外,轨道的高精度铺设是实现轨道初始高平顺性的关键。
而高精度CPIII控制网是无碴轨道施工的保证,并为日后运营维护提供控制基准。
6.1 CPIII控制网基础知识CPIII控制网是沿线路布设控制无碴轨道施工的三维施工控制网,起闭于上一级的基础平面控制网(CPI)或线路控制网(CPII)。
CPIII控制网点对称布设于线路两侧,每对间距约为15m左右,控制点间的纵向间距以50~60m为宜;CPIII平面网采用自由测站后方交会进行施测,其原始观测值为测站到测点的平距与方向,每两测站间有4对公共观测点,由此构成了一个控制网点间具有强相关性、精度分布较为均匀的边角交会网。
由于采用了全新的构网方式,需要发展相应的严密数据处理方法来对CPIII平面网观测数据进行处理。
6.1.1 CPIII相关概念(1)工程独立坐标系:为满足铁路工程建设要求采用的以任意中央子午线和高程投影面进行投影而建立的平面直角坐标系。
(2)基础框架平面控制网CP0:为满足线路平面控制测量起闭联测的要求,沿线路每50km左右建立的卫星定位测量控制网,作为全线勘测设计、施工、运营维护的坐标基准。
(3)基础平面控制网CPⅠ:在基础框架平面控制网(CP0)或国家高等级平面控制网的基础上,沿线路走向布设,按GPS静态相对定位原理建立,为线路平面控制网起闭的基准。
在勘测阶段按静态GPS相对定位原理建立。
点间距为4km左右,测量精度为GPS B级网。
(4)线路平面控制网CPⅡ:在基础平面控制网(CPⅠ)上沿线路附近布设,为勘测、施工阶段的线路平面控制和轨道控制网起闭的基准。
可用GPS静态相对定位原理测量或常规导线网测量,在勘测阶段建立。
第五讲 EDI电子数据交换

手工条件下,贸易单证的传递方式
¢ Ë «Æ Ò «Í ¼ î µ ¥ ¤ µ Ö ý Ý Ê ½ ¢ Í ¼ ý Ý â «Ë «Ê ½ ¾ í ¡ ú ´ Ó º © æ ú ´ Õ º ¼ æ Ö Ã ¥ ¤ µ Ö Ê Ö Ó ½ ¼ æ Ö Ã ¥ ¤ µ Ö » è Â È Ó Õ ¼ î µ ¼ Ê «Æ Ò ¥ ¤ µ Ö ý Ý Ê ½ Ó Õ ¼ ý Ý â ¼ Ê «Ê ½ ¾
Õ ó ¨¨ Ê º Í Ö O R
Æ á §¶ ² º Ö · ¦ à µ ³ Ó Ó Ï Í
¢ ª «Æ
¢ ª «Æ ¦ à µ ³ Ó Ó Ï Í ¢ ª «Æ T Æ á §¶ ² º Ö · ¦ à µ ³ Ó Ó Ï Í
§¶ ú » é Ö · Å ¬Ê S U
§ª Ö Æ
V
EDI的产生背景
1、EDI处理和传输的数据是参与贸易各方之间的商业文件。 2、文件传输采用国际公认的EDI标准报文格式,将商业文件标准化和 格式化,通过专门的计算机网络实现在贸易伙伴的计算机网络系统 之间进行数据交换和自动处理。 3、信息的发送, 接收与处理是由计算机自动进行的,无需人工干预。
1.什么是EDI EDI处理和传输的数据是参与贸易各方之间的 商业文件。 文件传输采用国际公认的EDI标准报文格式, 通过专门的计算机网络实现。 信息的发送,接收与处理是由计算机自动进行 的,无需人工干预。
EDI条件下贸易单证的传递方式
2.8.2 电子数据交换的主要优势
1)企业采用EDI可以更快速、更便宜地传送发票、采 购定单、传输通知和其它商业单证,提高快速交换单 证的能力,加快了商业业务的处理速度,更重要的是, 这些过程可以被监督,从而为企业提供了跟踪管理和 审计这些操作的能力。 2)通过对数据进行电子传输,避免了人工录入而出现 不一致的错误,提高了总体质量。降低数据对人的依 赖性,以及减少无意义的处理时间。 3)EDI能更快、更精确地填写订单,以便减少库存, 直到零库存管理。 4)EDI存储了完备的交易信息和审计记录,为管理决 策者提供更准确的信息和数据,进而为企业增加效率 和减少成本提供了更大的可能性。
一种新的CPⅢ平面控制网数据处理方法

用各 C Ⅲ点坐标 和测站点坐标 反算 方位 和距 离观 P 测值. 对该测站所有反算方位角加上同一定 向角 , 定 向角随机产生. 假定观测仪器标称精度 已知 , 测角精
度为 1, ”测距 为 I mm+ Ip 观 测 3个 测 回. 据 p m, 根 仪器 精度 对 产生 的模 拟 观测 数 据 附加 随机 误 差 值 . 第 二 测站 观测 在 开始 的 8个 C PⅢ点 间进行 , 三测 第
第 3卷 第 4 O 期 2 1 年 8月 01
兰
州 交
通
大
学
学
报
Vo . O No 4 1 3 . Au . 0 1 g 2 1
J uf l f az o ioo gUnv ri o ra n h uJatn ies y loL t
文章编号 :o 14 7 ( O 1 O 一0 卜O 1 O—3 3 2 1) 4O 7 4
平 面控 制 网 的平差 是可 行 的.
表 i 新方法解算结果
T b i A j s n slo eHW mehd a . dut t eut f h e to me r t
8[ 一
和 路 分别为方位 观测值 和距离观测值 的验
Q— H1 + H2 聍 研
可 得基 线观 测 向量 的权 阵 P= . = : 由于 最小 范
则由文献[ ] 3 可得 :
站在开始 的 l 个 点 间进行 , 2 模拟观 测数据 产生 同 前. 以后每测站要求观测 1 个 C Ⅲ点 , 2 P 且保证对所
有 C Ⅲ点观 测 3次. P 另外 测段末 尾 3 要按 初 3站 站 的逆顺 序 进行 , 即倒 数第 三 站 观测 1 点 , 数 第 2个 倒 二 站 观测 8 点 , 个 倒数 第一 站观 测 4个 C PⅢ点 . 对1 0套数 据 处理 结果 如表 1 示. 所 从表 I数据
平面控制网数据处理

平差软件的应用
•输入控制网观测数据 在控制点区输入各已知点及待定点点号、坐标。
平差软件的应用
•输入控制网观测数据 在观测值输入区输入各角度观测值。 角度观测值是与零方向的夹角值
平差软件的应用
•坐标推算 单击“平差”→“坐标推算”以计算各待定平面点近似坐标。
平差软件的应用
•坐标推算 单击“平差”→“计算方案” 进行控制网参数的设置。
96 51 36
边长 D
(m)
201.58 263.41 241.00 200.44 231.32
增量计算值
±Δx ±Δy
(m)
(m)
(-0.04) -24.08
(+0.04) +200.14
(-0.06) +238.13 (-0.06) +80.36 (-0.04) -83.84 (-0.05) -210.32
n
Si
Si
i1
Xi Xi1 Xi1vxi 1 Y i Y i1 Y i1vyi 1
平面网平差原理
三、推算导线坐标
Xi1Xi Xi,i1 Yi1Yi Yi,i1
3(X 3 ,Y3)
3A
23
(X A,YA)A
M
A1 S A1
2
(X 2 ,Y2) 12
( X 1 , Y1)
1
02 平面网的平差计算步骤
例如一级导线
f容 1" 0n1
角度的改正数
v
f n1
平面网平差原理
二、坐标闭合差及其配赋
βn
M
β2
P2
S
2
β1
S1
A
P3
Pn
N
控制测量学课件——平面控制网的布设
将上表中的数据代入此式得出
s 1.07 50 8(km)
s 1.07 150 13(km)
s 1.07 20 5(km)
8 /8
因此国家规范中规定,国家二、三等三角网的
6
平均边长分别为13km和8km。
2.1.1 国家平面控制网的布设原则
4.应有统一的规格
由于我国三角锁网的规模巨大,必须有大量的 测量单位和作业人员分区同时进行作业,为此, 必须由国家制定统一的大地测量法式和作业规范 《国家三角测量和精密导线测量规范》,作为建 立全国统一技术规格的控制网的依据。
第二章 平面控制网的布设
[本章提要] 2.1 平面控制网的布设原则和方案 2.2 平面控制网的技术设计 2.3 平面控制网的精度估算 2.4 平面控制网的选点、造标埋石
[习题]
1 /8 6
本章提要
本章讲述平面控制网的布设,目的是解决平面 控制点位置的选择问题。内容涉及平面控制网 的布设原则、布设方案;平面控制网的技术设 计、精度估算;平面控制网的选点、造标埋石。
1.一等三角锁布设方案
一等三角锁是国家大地控制网的骨干,其主要作用是控制二等以 下各级三角测量,并为地球科学研究提供资料。一等三角锁尽可能沿 经纬线方向布设成纵横交叉的网状图形,如下图所示。
11 /8 6
1.一等三角锁布设方案
一等锁在起算边两端点上精密测定了天文经纬度和天文方
位角,作为起算方位角,用来控制锁、网中方位角误差的积
13 /8 6
2.1.2 国家平面控制网布设方案
2.二等三角锁、网布设方案
14 /8
图a
图b
6
2.1.2 国家平面控制网布设方案
3.三、四等三角网布设方案
mcgs第五讲_ppt

在开始定义之前,我们先对所有数据对象进行分析。 (以水位控制系统为例)
变量名称 水泵 调节阀 出水阀 液位1
液位2
液位1上限 液位1下限 液位2上限 液位2下限 液位组
类型 开关型 开关型 开关型 数值型
数值型
数值型 数值型 数值型 数值型 组对象
注释 控制水泵“启动”、“停止”的变量 控制调节阀“打开”、“关闭”的变量 控制出水阀“打开”、“关闭”的变量 水罐1的水位高度,用来控制1#水罐水位的
在组态时,只需要建立动画构件与实时数据库中数据对象 的对应关系,就能完成动画构件的连接,如对实时曲线构 件,需要指明该构件运行时记录哪个数据对象的变化曲线 ;对报警显示构件,需要指明该构件运行时显示哪个数据 对象的报警信息。
四、实例 以水位控制系统为例需制作动画效果的部分包括:
Ⅰ水箱中水位的升降 Ⅱ水泵、阀门的启停 Ⅲ水流效果 Ⅰ水箱中水位的升降效果 水位升降效果是通过设置数据对象“大小变 化”连接类型实现的。 具体设置步骤如下:
液位2。
练习与思考
n 1、如何使画面中的数字、文本显示等能根据值 的不同用不同的颜色显示?
答:可以用多个图形或文本相叠加的方法实现,例如; 某个测量值value在0-100内用蓝色表示,大于100时用 红色表示,就可以用两个同样大小的显示框,一个字体 颜色选为蓝色,设置其属性中的可见度表达式为 value>100,对应图符不可见。另一个用红色,设置其 属性中的可见度表达式为value>100,对应图符可见。 这样在系统运行时就会根据value值的不同显示不同的颜 色。
水罐2水位升降效果的制作同理。单击进入 动画组态属性设置窗口后,按照下面的值进行参 数设置:
表达式:液位2; 最大变化百分比对应的表达式的值:6; 其它参数不变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
必须满足的指标
控制测量
测角中误差
控制测量
最弱边相对中误差
控制测量
①数据准备
L1 387 .363m L2 306 .065 m
L3 354 .862 m
控制测量
②数据输入
控制测量
③控制网概算
控制测量
④选择平差方案
控制测量
⑤控制网平差
控制测量
⑥精度评定
控制测量
控制测量
①数据准备
控制测量
控制测量 任务三:平面控制网数据处理
内
1、测角网平差计算
重点
容
2、测边网平差计算
重点
安
3、导线网平差计算
难点
排
控制测量
平 面 控 制 测 量 的 流 程
技术设计 外业验算 选点埋石 外业观测 外业验算
内业检查 数据准备 上机计算 精度评定 结果输出
控制测量
概算
内业数据处理的内容
角度、边长改化
控制测量
②数据输入
控制测量
③控制网概算
控制测量
④选择平差方案
控制测量
⑤控制网平差
控制测量
⑥精度评定
近似坐标计算平差计算源自选择平差软件实施平差
精度评定
依据规范评定精度
输出平差结果
控制测量
平差计算的步骤 ①数据准备 ②数据输入
③控制网概算 ④选择平差方案 ⑤控制网平差
⑥精度评定
控制测量
①数据准备
控制测量
②数据输入
控制测量
③控制网概算
控制测量
④选择平差方案
控制测量
⑤控制网平差
控制测量
⑥精度评定 1.测角中误差 2.最弱边相对中误差