利用相关分析法辨识脉冲响应
脉冲响应原理
脉冲响应原理脉冲响应原理是信号处理和系统控制领域中的一个重要概念。
它描述了线性时不变系统对单位脉冲信号的响应过程,也称为单位冲激响应。
在信号处理和系统控制中,我们经常会遇到各种各样的信号,如正弦信号、方波信号等。
但单位脉冲信号是一个特殊的信号,它的幅度只有一个脉冲宽度内的一瞬间为1,其他时间都为0。
由于单位脉冲信号具有特殊性质,当一个输入信号通过一个线性时不变系统时,系统的输出信号与系统对单位脉冲信号的响应相关联。
脉冲响应(h[n])可以通过单位脉冲信号(δ[n])和系统的单位冲激响应(impulse response)(h[n])的卷积运算来表示。
即:y[n] = x[n] * h[n]其中y[n]为系统的输出信号,x[n]为系统的输入信号,*表示卷积运算。
脉冲响应原理在实际应用中具有广泛的意义和应用。
首先,它是系统辨识的基础,即通过输入输出信号的测量,可以获得系统的脉冲响应,从而了解系统的特性和行为。
例如,在音频处理中,可以通过测量音频设备对单位脉冲信号的响应,了解其传递函数和频率响应。
其次,脉冲响应原理在信号滤波中有重要的应用。
在数字滤波器设计中,通过脉冲响应可以确定滤波器的传递函数,进而实现对输入信号的滤波处理。
例如,低通滤波器可以通过脉冲响应的卷积运算实现去除高频信号的效果。
此外,脉冲响应原理还在系统控制中起到重要作用。
在控制系统中,脉冲响应描述了系统对单位脉冲输入信号的响应行为,可以用于分析系统的稳定性、动态特性和频率响应。
例如,通过脉冲响应可以分析系统的阻尼系数、自然频率和阶跃响应。
总之,脉冲响应原理是信号处理和系统控制的基础概念之一,它描述了线性时不变系统对单位脉冲信号的响应过程。
通过脉冲响应可以对系统的特性进行分析和预测,并在信号处理和系统控制中得到广泛应用。
上机实习Ⅰ:系统辨识方法初识

上机实习Ⅰ:系统辨识方法初识12自动化许天野12350068指导老师:王国利摘要:系统辨识、状态估计和控制理论是现代控制论中相互渗透的三个领域。
控制理论的应用离不开系统辨识技术,实际中,许多控制系统的模型在工作中是变化的,为了实现自适应控制,需要系统辨识技术不断更新模型参数。
通过学习使用MATLAB软件,初步体验系统辨识方法。
关键字:系统辨识,控制理论,MATLAB。
Practice 1:Practice the method of System identification Abstract: System identification, State estimation and The Principle of Automatic Control are three different disciplines of the modern control theory, which are interpenetrated with one another. In practice, the model of system is changing all the time. To control adaptively, the system model should be update its parameters, by the method of System identification. By learning the using of MATLAB, we are supposed to practice the method of system identification.Key Words: System identification, System identification, MATLAB目录一、引言 (3)1.1介绍 (3)1.2实验目的 (3)二、实验内容和方法 (3)2.1实验内容 (3)2.2实验步骤 (3)2.2.1输入信号选择 (4)2.2.2 数据收集 (4)2.2.3 实验步骤 (4)三、实验结果 (5)四、实验分析探究 (7)4.1分析 (7)4.2探究 (7)4.3结果分析 (10)一、引言1.1介绍在自然科学和社会科学的许多领域中,人们越来越重视对系统进行定量的系统分析、系统综合、仿真、控制和预测。
基于相关分析法的脉冲响应辨识实验设计
基于相关分析法的脉冲响应辨识实验设计刘恒;孙晋;邰凡彬;张易晨【摘要】In combination with the knowledge points of the curriculum and by using the 555 timer,dual D flip-flop, NAND gate and operational amplifier,the m sequence signal generation is realized.The two-order identification system is designed through the operationalamplifier,capacitors and resistors.The Multisim software simulation verifies the correctness of the circuit design.The Matlab software is used to simulate the identification of impulse response with the correlation analysis,and the effectiveness of the algorithm is verified.The identification circuit with the correlation analysis is constructed by using the level lifting circuit,STM32F103 SCM and TFT screen.The experimental test shows that the six-order m sequence signal can correctly stimulate the two-order system,and the hardware circuit can realize the identification of the impulse response curve and identify the error of 2%.This experiment canbe used as a practical training experiment for the principle and application of the SCM,Digital Signal Processing course and electronic design contest for college students.%结合课程知识点,采用555定时器、双D触发器、与非门、运算放大器实现m序列信号产生,二阶辨识系统通过运算放大器、电容、电阻设计,M ultisim软件仿真验证了电路设计的正确性.利用M atlab软件对相关分析法辨识脉冲响应进行了仿真,验证了算法的有效性.利用电平抬升电路和ST M 32F103单片机、T FT屏构建了相关分析法辨识电路.实验测试表明:6阶m序列信号能正确激励二阶系统,硬件电路能实现脉冲响应曲线的辨识,辨识存在2% 的误差.本实验可作为单片机原理及应用和数字信号处理课程综合设计和大学生电子设计竞赛实训实验.【期刊名称】《实验技术与管理》【年(卷),期】2018(035)005【总页数】7页(P53-59)【关键词】m序列信号;相关分析法;系统辨识;脉冲响应【作者】刘恒;孙晋;邰凡彬;张易晨【作者单位】南京信息工程大学电子与信息工程学院,江苏南京 210044;南京信息工程大学电子与信息工程学院,江苏南京 210044;南京信息工程大学电子与信息工程学院,江苏南京 210044;南京信息工程大学电子与信息工程学院,江苏南京210044【正文语种】中文【中图分类】TN911.71;G642.423系统辨识是控制领域的一个十分重要分支。
系统辨识实验报告30288
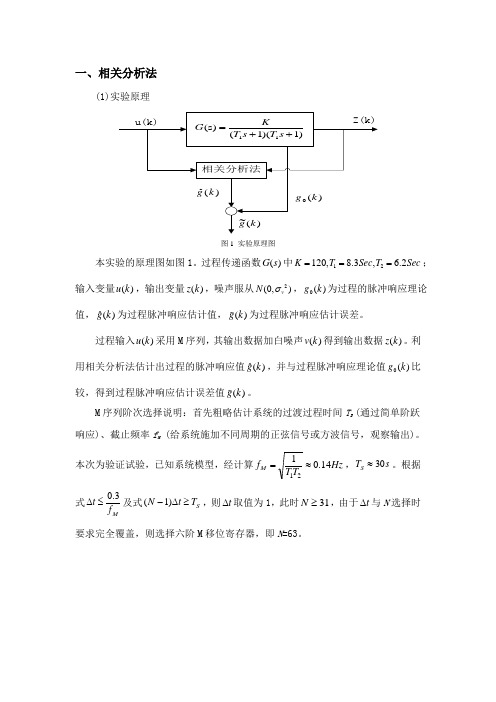
一、相关分析法(1)实验原理图1 实验原理图本实验的原理图如图1。
过程传递函数()G s 中12120,8.3, 6.2K T Sec T Sec ===;输入变量()u k ,输出变量()z k ,噪声服从2(0,)v N σ,0()g k 为过程的脉冲响应理论值,ˆ()gk 为过程脉冲响应估计值,()g k 为过程脉冲响应估计误差。
过程输入()u k 采用M 序列,其输出数据加白噪声()v k 得到输出数据()z k 。
利用相关分析法估计出过程的脉冲响应值ˆ()gk ,并与过程脉冲响应理论值0()g k 比较,得到过程脉冲响应估计误差值()g k 。
M 序列阶次选择说明:首先粗略估计系统的过渡过程时间T S (通过简单阶跃响应)、截止频率f M (给系统施加不同周期的正弦信号或方波信号,观察输出)。
本次为验证试验,已知系统模型,经计算Hz T T f M 14.0121≈=,s T S 30≈。
根据式Mf t 3.0≤∆及式S T t N ≥∆-)1(,则t ∆取值为1,此时31≥N ,由于t ∆与N 选择时要求完全覆盖,则选择六阶M 移位寄存器,即N =63。
(2)编程说明图2 程序流程图(3)分步说明 ① 生成M 序列:M 序列的循环周期63126=-=N ,时钟节拍1t Sec ∆=,幅度1a =,移位寄存器中第5、6位的内容按“模二相加”,反馈到第一位作为输入。
其中初始数据设为{1,0,1,0,0,0}。
程序如下:② 生成白噪声序列: 程序如下:③ 过程仿真得到输出数据:如图2所示的过程传递函数串联,可以写成形如121211()1/1/K Gs TT s T s T =++,其中112KK TT =。
图2 过程仿真方框图程序如下:④ 计算脉冲响应估计值:互相关函数采用公式)()(1)(10k i y i x Nr k R N r i xy +⋅⋅=∑-⋅=,互相关函数所用的数据是从第二个周期开始的,其中r 为周期数,取1-3之间。
实验一 利用相关辨识法辨识脉冲响应
《系统辨识基础》第11讲要点实验一 利用相关分析法辨识脉冲响应一、实验目的通过仿真实验掌握利用相关分析法辨识脉冲响应的原理和方法。
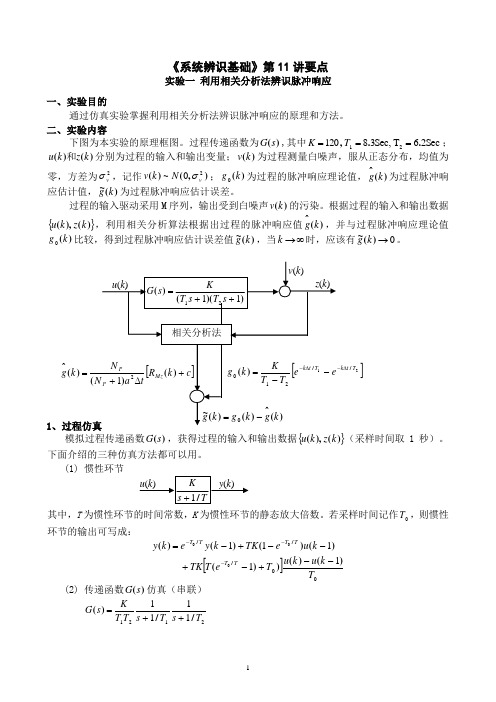
二、实验内容下图为本实验的原理框图。
过程传递函数为)(s G ,其中Sec 26T Sec,3812021..,===T K ;)()(k z k u 和分别为过程的输入和输出变量;)(k v 为过程测量白噪声,服从正态分布,均值为零,方差为2v σ,记作),(~)(20v N k v σ;)(k g 0为过程的脉冲响应理论值,)(ˆk g 为过程脉冲响应估计值,)(~k g为过程脉冲响应估计误差。
过程的输入驱动采用M 序列,输出受到白噪声)(k v 的污染。
根据过程的输入和输出数据{})(),(k z k u ,利用相关分析算法根据出过程的脉冲响应值)(ˆk g ,并与过程脉冲响应理论值)(k g 0比较,得到过程脉冲响应估计误差值)(~k g,当∞→k 时,应该有0→)(~k g 。
1模拟过程传递函数)(s G ,获得过程的输入和输出数据{})(),(k z k u (采样时间取1秒)。
下面介绍的三种仿真方法都可以用。
(1) 惯性环节 其中,T 为惯性环节的时间常数,K为惯性环节的静态放大倍数。
若采样时间记作0T ,则惯性环节的输出可写成:[]011111000T k u k u T e T TK k u e TK k y e k y T T T T T T )()())()()()()(///--+-+--+-=---(2) 传递函数)(s G 仿真(串联)21211111T s T s T T K s G //)(++=k g =)(ˆ]2T t k /∆令211T T KK =,则)(s G 的表达框图为:编程语句可写成:[][][][]};);()();()();()(;/)()(*)(**)(*)(*)(*)(;/)()(*)(***)(*)(**)(*)({);;(;)(;)();/();/();*/(k y k y k x k x k u k u T k x k x T E T T k x E T k y E k y T k u k u T E T K T k u E K T k x E k x k k k y x T T E T T E T T K K =-=-=---+-+--+-=--+-+--+-=++<===-=-==11111111111112521for 0000EXP EXP 002222220011111111202101211(3) 传递函数)(s G 仿真(并联) ⎪⎪⎭⎫ ⎝⎛+-+-=21211111T s T s T T K s G //)(令211T T KK -=,则)(s G 的表达框图为:编程语句可写成:[][][][][]};);()();()();()()()(*)(;/)()(*)(**)(*)(*)(*)(;/)()(*)(**)(*)(*)(*)({);;(;)(;)(;)();/();/();/(k x k x k x k x k u k u k x k x K k y T k u k u T E T T k u E T k x E k x T k u k u T E T T k u E T k x E k x k k k y x x T T E T T E T T K K 2211211002222222200111111112120210121111111111111112521for 000000EXP EXP =-=-=--=--+-+--+-=--+-+--+-=++<==-=-=-=-=(4) 传递函数)(s G 仿真(双线性变换) ● Pade 逼近 因有s T s T sT sT ez sT 0000Pade 2221210-+=-+==//,则有110112--+-=z z T s ,条件是k T P k ∀≤,.500,其中k P 为传递函数的极点。
声学脉冲响应
声学脉冲响应
脉冲响应(Impulse Response, IR)可以定义为一个被测系统在一个脉冲激励信号输入时,所得到的时域(时间-幅度)的响应特性。
在声学分析中,脉冲响应被认为是一个系统的声学“签名”,包含了丰富的声学信息,包括到达时间、直达声的频率成分、离散反射声、混响衰减特性、信噪比和分析语言可懂度的必要信息,以及整体的频率响应。
脉冲响应广泛应用于房间均衡和计算房间声学参数等领域。
例如,使用脉冲响应反向积分法计算房间混响时间时,需要先测量房间内的声源到传声器的脉冲响应。
测量房间脉冲响应有许多种方法,其中常用的方法是最大长度序列法。
总的来说,脉冲响应是一个系统对脉冲激励的时域响应,包含了丰富的声学信息,对于研究系统的声学特性和应用具有重要意义。
系统辨识的经典方法
⎧T
⎨⎩τ
= 2(t2 − t1) = 2t1 − t2
对于以上结果,也可在
⎧⎪⎨tt34
≤τ,
= 0.8T
+τ
,
⎪⎩t5 = 2T +τ ,
y(t3 ) = 0 y(t4 ) = 0.55 y(t5 ) = 0.87
这几点上对实际曲线的拟合精度进行检验。
系统辨识的经典方法
频率响应法
频率响应法-1
; 阶跃响应法辨识原理
¾ 在系统上施加一个阶跃扰动信号,并测定出对象的响应随时间 而变化的曲线,然后根据该响应曲线,通过图解法而不是通过 寻求其解析公式的方法来求出系统的传递函数,这就是阶跃响 应法系统辨识。
¾ 如果系统不含积分环节,则在阶跃输入下,系统的输出将渐进 于一新的稳定状态,称系统具有自平衡特性,或自衡对象。
+ b1s + a1s
+ +
b0 a0
,
n>m
¾ 对应的频率特性可写成:
G(
jω)
=
bm ( an (
jω)m +" + b2 ( jω)2 + b1( jω)n +" + a2 ( jω)2 + a1(
jω) + b0 jω) + a0
=
(b0 − b2ω 2 (a0 − a2ω 2
+ b4ω 4 + a4ω 4
系统辨识的经典方法
肖志云
内蒙古工业大学信息工程学院自动化系
系统辨识的经典方法
1
引言
2
阶跃响应法
3
频率响应法
4
相关分析法
系统辨识
相关分析法通常采用类似白噪声的伪随机信号作为输入测试信号,这种信号对系统的正常工作干扰不大。
通常不加专门的输入测试信号,仅利用正常工作状态下测量的输入及输出信号,就可得到良好的辨识效果。
相关分析法辨识抗干扰能力强、数据处理简单、辨识精度高,因此应用比较广泛,尤其是在需要在线辨识的场合。
相关分析法辨识具有最小二乘法辨识的统计特性,即使在有色噪声干扰下,也可以得到无偏估计,这是它和一般最小二乘法相比最大的优点。
在采用相关分析法进行系统辨识时,系统的脉冲响应函数可由系统的输入及输出数据的相关函数来描述,因此,输入信号的选择及相关函数的估计是相关分析法的关键所在。
持续激励输入信号的要求。
更进一步的要求是输入信号必须具有较好的“优良性”,即输入信号的选择应能使给定问题的辨识模型精度最高。
在具体工程应用中,选择输入信号时还应考虑以下因素:输入信号的功率或幅度不宜过大,以免使系统工作在非线性区,但也不应过小,以致信噪比太小,直接影响辨识精度。
工程上要便于实现,成本低。
相关分析法是属于统计分析的方法,它的理论基础就是著名的维纳-霍甫积分方程。
这个方程为积分方程,不易求解,但如果采用白噪声作为系统输入,则可方便的求出系统的脉冲响应。
但是运用白噪声求系统响应,理论上需要无限长时间上的观测数据,这是不希望和不允许的,因此具有人工可以复制的、有规律的、周期性的伪随机信号是更适合应用的。
这种信号具有类似白噪声的性质,目前最常用的是伪随机二位式序列,它们主要有M序列和逆重复M序列,它们可由计算机或线性反馈寄存器产生。
用M序列和逆重复M序列对系统的脉冲响应进行辨识时,都是在离散的时间上进行的。
由它们获得的响应函数是原函数的一致性估计。
为了提高辨识精度,可采用多个周期输入伪随机序列的方法。
当对系统进行在线辨识时,可以采用脉冲响应的递推计算公式。
多变量系统的脉冲响应的辨识问题,最后要归结为用单变量系统辨识方法进行,所不同的只是较复杂。
利用相关分析法辨识脉冲响应
实验一 利用相关分析法辨识脉冲响应一、实验目的通过仿真实验掌握利用相关分析法辨识脉冲响应的原理和方法。
二、实验原理下图为本实验的原理框图。
过程传递函数为)(s G ,其中Sec 26T Sec,3812021..,===T K ;)()(k z k u 和分别为过程的输入和输出变量;)(k v 为过程测量白噪声,服从正态分布,均值为零,方差为2v σ,记作),(~)(20v N k v σ;)(k g 0为过程的脉冲响应理论值,)(ˆk g 为过程脉冲响应估计值,)(~k g为过程脉冲响应估计误差。
过程的输入驱动采用M 序列,输出受到白噪声)(k v 的污染。
根据过程的输入和输出数据{})(),(k z k u ,利用相关分析算法估计出过程的脉冲响应值)(ˆk g ,并与过程脉冲响应理论值)(k g 0比较,得到过程脉冲响应估计误差值)(~k g,当∞→k 时,应该有0→)(~k g 。
三、实验步骤(1) 掌握相关分析辨识方法的基本原理。
(2) 设计实验方案。
(3) 编制实验程序。
(4) 调试程序,研究实验问题,记录数据。
k g =)(ˆ]2T t k /∆(5) 分析实验结果,完成实验报告。
四、实验报告(1) 实验对象及参数对于传递函数21211111T s T s T T K s G //)(++=初始数据为:K=200,T1=10,T2 = 8,T=1 (2) 程序代码: a.主程序如下:function correlationAnalysis %数据初始化 K=200; T1=10; T2=8; a=1;T=1;%采样周期 r=3; Np=63;%产生随机序列M=[ 1 1 1 1 1 1 0 0 0 0 0 ... 1 0 0 0 0 1 1 0 0 0 1 ... 0 1 0 0 1 1 1 1 0 1 0 ... 0 0 1 1 1 0 0 1 0 0 1 ... 0 1 1 0 1 1 1 0 1 1 0 ... 0 1 1 0 1 0 1 0 ]; M=-2*M+ones(1,size(M,2)); u=[M,M,M,M,M,M,M]; num=size(u,2);v=whitenoise(num); %传递函数计算 K1=K/(T1*T2);x=transferFcn(T1,u,K1);y=transferFcn(T2,x,1);z=y+v;g0 = theoreticalValue(Np,T,T1,T2,K);g1 = estValue(r,Np,u,z,a);dif = ImpEstErr(g0,g1,Np);%作图disp(dif)tt=linspace(0,Np,Np);plot(tt,g0,'-.');hold onplot(tt,g1);legend('理想的脉冲响应','相关分析法估计结果'); ylabel('y');xlabel('t');endb.产生高斯白噪声程序如下:function v=whitenoise(n)a1=65539;m=2147483647;b=2;NN=12*n;x1=zeros(1,NN);R=zeros(1,NN);x1(1)=56326;R(1)=x1(1)/m;for i1=2:NNx1(i1)=mod(a1*x1(i1-1)+b,m);R(i1)=x1(i1)/m;endv=zeros(1,n);for i2=1:nfor j=1:12v(i2)=v(i2)+R((i2-1)*12+j);endv(i2) = v(i2) - 6;endendc.传递函数程序如下:function y=transferFcn(T,u,K)T0=1;len=size(u,2);%得到得输出序列的长度y=zeros(1,len);%initial is 0for k=2:leny(k)=exp(-T0/T)*y(k-1)+T*K*(1-exp(-T0/T))*u(k-1)+T*K*(T*(exp(-T0/T)-1) +T0)*(u(k)-u(k-1))/T0;endendd.脉冲响应估计程序如下:function g1=estValue(r,Np,u,z,a)Rmz=zeros(1,Np);for k1=1:Npsum0=0;for i=(Np+1):(r+1)*Npsum0=u(i-k1)*z(i)+sum0;endRmz(k1)=sum0/(r*Np);endc=-Rmz(Np-1);loop_len=size(Rmz,2);g1=Np.*(Rmz+c.*ones(1,loop_len))./((Np+1)*a^2);ende.脉冲响应估计误差程序如下:function dif=ImpEstErr(g0,g,Np)sum1=0;sum2=0;for i=1:Np;sum1=(g0(i)-g(i))^2+sum1;sum2=g0(i)^2+sum2;enddif=sqrt(sum1/sum2);endf.产生系统脉冲响应理论值程序如下:function g0 = theoreticalValue(Np,T,T1,T2,K)g0=zeros(1,Np);for i=1:Npg0(i)=K*(exp(-i*T/T1)-exp(-i*T/T2))/(T1-T2);endend(3)实验结果及其分析1数据记录t 1 2 3 4 5 6 7脉冲响应估计值0.79 0.92 1.02 1.04 1.05 1.01 0.92 脉冲响应理论值 2.03 3.52 4.59 5.32 5.77 6.02 6.11 t 8 9 10 11 12 13 14脉冲响应估计值0.87 0.80 0.74 0.65 0.57 0.50 0.42 脉冲响应理论值 6.07 5.94 5.74 5.49 5.21 4.91 4.60 t 15 16 17 18 19 20 21脉冲响应估计值0.33 0.23 0.17 0.10 0.05 -0.01 -0.06 脉冲响应理论值 4.29 3.99 3.69 3.40 3.12 2.86 2.62 t 22 23 24 25 26 27 28脉冲响应估计值-0.10 -0.16 -0.19 -0.22 -0.25 -0.29 -0.28脉冲响应理论值 2.39 2.18 1.98 1.80 1.63 1.48 1.33 t 29 30 31 32 33 34 35脉冲响应估计值-0.30 -0.31 -0.32 -0.36 -0.37 -0.39 -0.41 脉冲响应理论值 1.20 1.09 0.98 0.88 0.79 0.71 0.64 t 36 37 38 39 40 41 42脉冲响应估计值-0.44 -0.46 -0.47 -0.46 -0.49 -0.51 -0.52 脉冲响应理论值0.58 0.52 0.46 0.41 0.37 0.33 0.30 t 43 44 45 46 47 48 49脉冲响应估计值-0.53 -0.54 -0.55 -0.55 -0.56 -0.54 -0.56 脉冲响应理论值0.27 0.24 0.21 0.19 0.17 0.15 0.13 t 50 51 52 53 54 55 56脉冲响应估计值-0.57 -0.57 -0.56 -0.57 -0.57 -0.56 -0.55 脉冲响应理论值0.12 0.11 0.10 0.09 0.08 0.07 0.06 t 57 58 59 60 61 62 63脉冲响应估计值-0.53 -0.52 -0.53 -0.52 -0.53 0.00 0.61 脉冲响应理论值0.05 0.05 0.04 0.04 0.03 0.03 0.03 2曲线打印1)初始参数如下:试验曲线为下图:δ脉冲响应估计误差0.0355=g2)初始参数如下:试验曲线为下图:δ脉冲响应估计误差0.0561=g当r=1时:δ脉冲响应估计误差0.0561=g当r=3时:δ脉冲响应估计误差0.0355=g(4)结论利用相关分析法分析脉冲响应,得到脉冲响应的估计误差是随着周期数的增大而减小的,增大周期数能够减小估计误差。
相关分析法系统辨识平台设计
R r ()一 l () r )a gaR ( —A d
J 0
() 1
式 中 : 表 示输 入信号 和输 出信 号 的互 相 关 函数 , 表 R R 示 输入信 号 的 自相 关 函数 , ()表 示辨 识 对象 的脉 冲 响应 gf
函数 。
率 响应 法是两 种最 常用 的经 典辨 识 方 法 , 这 两 种 方法 都 但 容 易受 到噪声 的干 扰 , 基 于统 计 学原 理 的相 关分 析 法 可 而
摘
要 :用 伪 随机 二 进 制序 列进 行 相 关 分 析 是 辨 识 系 统 脉 冲 响 应 函 数 的有 效 方 法 。 给 出 一 种 用 伪 随 机 i 列 作 为 n序
输 入 信 号 , L b E 实 现 信 号 采 集 的辨 识 系统 平 台 , 中 m 序 列 基 于 F GA 生 成 , 变 少 数 参 数 就 可 以 对 序 列 长 用 aVI W 其 P 改 度、 周期 等 进 行 了 调 整 。最 后 , 出 了 两 个 辨 识 实 例 。 给
s qu nc s t npu i na nd La e e e a he i t sg la bV I EW orsgn c uiiin. T h e do — a do e e e g ne a e as d o f i ala q sto e ps u r n m m s qu nc e r t d b e n
在一定 的连 续 时间性 的输 入 信号 下 , 测 被识 对 象 对 这种 观 输 入作 用 的响应 , 称这 些 方法为 系统 辨识经 典方 法 , 们有 它 别 于最小 二乘 辨识 、 自适 应辨 识 、 度 校正 法 、 机逼 近 梯 随
法 、 大 似 然 法 等 一 系 列 现 代 辨 识 方 法 。 瞬 态 响 应 法 和 频 极
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用相关分析法辨识脉冲响应自1205 刘彬 412511411 实验方案设计1.1 生成输入数据和噪声用M 序列作为辨识的输入信号,噪声采用标准正态分布的白噪声。
生成白噪声时,首先利用乘同余法生成U[0,1]均匀分布的随机数,再利用U[0,1]均匀分布的随机数生成标准正态分布的白噪声。
1.2 过程仿真模拟过程传递函数)(s G ,获得输出数据y(k)。
)(s G 采取串联传递函数仿真,21211111)(T s T s T T K s G ++=,用M 序列作为辨识的输入信号。
1.3 计算互相关函数∑++=-=pp N r N i pMz i z k i u rN k R )1(1)()(1)(其中r 为周期数,1+=p N i 表示计算互相关函数所用的数据是从第二个周期开始的,目的是等过程仿真数据进入平稳状态。
1.4 计算脉冲响应估计值、脉冲响应理论值、脉冲响应估计误差脉冲响应估计值[])1()()1()(ˆ2--∆+=p Mz MzppN R k Rta N N k g脉冲响应理论值[]21//210)(T t k T t k e e T T Kk g ∆-∆---=脉冲响应估计误差()()∑∑==-=ppN k N k g k gk gk g1212)()(ˆ)(δ 1.5 计算噪信比信噪比()()22)()(v k v y k y --=η2 编程说明M 序列中,M 序列循环周期取63126=-=p N ,时钟节拍t ∆=1Sec ,幅度1=a ,特征多项式为1)(56⊕⊕=s s s F 。
白噪声循环周期为32768215=。
)(s G 采样时间0T 设为1Sec ,Sec 2.6 Sec,3.8 ,12021===T T K3 源程序清单3.1 均匀分布随机数生成函数function sita=U(N)%生成N 个[0 1]均匀分布随机数 A=179; x0=11; M=2^15; for k=1:N x2=A*x0;x1=mod(x2,M); v1=x1/(M+1); v(:,k)=v1; x0=x1; end sita=v; end3.2 正态分布白噪声生成函数function v=noise(aipi)%生成正态分布N(0,sigma)sigma=1; %标准差for k=1:length(aipi)ksai=0;for i=1:12temp=mod(i+k,length(aipi))+1;ksai=ksai+aipi(temp);endv(k)=sigma*(ksai-6);endend3.3 M序列生成函数function [Np r M]=createM(n,a)%生成长度为n的M序列,周期为Np,周期数为rx=[1 1 1 1 1 1]; %初始化初态for i=1:ny=x;x(2:6)=y(1:5);x(1)=xor(y(5),y(6));U(i)=y(6);endM=U*a;lenx=length(x);Np=2^lenx-1;r=n/Np;end3.4 过程仿真函数function y=createy(u,K,T1,T2,T0)n=length(u);K1=K/(T1*T2);E1=exp(-T0/T1);E2=exp(-T0/T2);x(1)=0;y(1)=0;for k=2:nx(k)=E1*x(k-1)+T1*K1*(1-E1)*u(k-1)...+T1*K1*(T1*(E1-1)+T0)*(u(k)-u(k-1))/T0;y(k)=E2*y(k-1)+T2*(1-E2)*x(k-1)...+T2*(T2*(E1-1)+T0)*(x(k)-x(k-1))/T0;u(k-1)=u(k);x(k-1)=x(k);y(k-1)=y(k);endend3.5 相关函数计算函数function R_Mz=RMz(Np,r,u,z)r=r-1;y=zeros(1,Np);for k=1:Npy(k)=0;for i=Np+1:(r+1)*Npy(k)=y(k)+u(i-k)*z(i);endy(k)=y(k)/(r*Np);endR_Mz=y;end3.5 主函数function [og yita]=main(time)% 脉冲响应估计误差og% 噪信比yitaN=time*63;K=120; T1=8.3; T2=6.2; T0=1; a=1;sita=U(N); %生成[0 1]均匀分布随机数v=noise(sita); %利用aipi生成正态分布白噪声[Np r u]=createM(N,a); %生成长度为N的M序列y=createy(u,K,T1,T2,T0); %利用M序列驱动,生成yz=y+v;R_Mz=RMz(Np,r,u,z); %计算相关函数% 计算脉冲响应估计值g_k=zeros(1,Np);for k=1:Npg_k(1,k)=(R_Mz(1,k)-R_Mz(Np-1))*Np/((Np+1)*a*a*T0);end% 计算脉冲响应理论值Eg=zeros(1,Np);for k=1:NpEg(1,k)=K/(T1-T2)*(exp(-k*T0/T1)-exp(-k*T0/T2));end% 计算脉冲响应估计误差og=sqrt(norm(Eg-g_k)^2/norm(Eg)^2);ov=fangcha(v); %计算噪声方差oy=fangcha(y); %计算信号方差yita=sqrt(oy/ov); %计算信噪比End3.5 画图函数1%mainPlot.mfigure(1)for n=4:40[og yita]=main(n);y1(n)=og;endy1=y1(4:40);plot([4:40],y1);xlabel('周期数');ylabel('脉冲响应估计误差');figure(2)for n=4:40[og yita]=main(n);y2(n)=yita;endy2=y2(4:40);plot([4:40],y2);xlabel('周期数');ylabel('噪信比');3.5 画图函数2%mainPlot2.mN=252;K=120; T1=8.3; T2=6.2; T0=1; a=1;sita=U(N); %生成[0 1]均匀分布随机数v=noise(sita); %利用aipi生成正态分布白噪声[Np r u]=createM(N,a); %生成长度为N的M序列y=createy(u,K,T1,T2,T0); %利用M序列驱动,生成yz=y+v;R_Mz=RMz(Np,r,u,z); %计算相关函数% 计算脉冲响应估计值g_k=zeros(1,Np);for k=1:Npg_k(1,k)=(R_Mz(1,k)-R_Mz(Np-1))*Np/((Np+1)*a*a*T0);end% 计算脉冲响应理论值Eg=zeros(1,Np);for k=1:NpEg(1,k)=K/(T1-T2)*(exp(-k*T0/T1)-exp(-k*T0/T2));endfigure(1)plot([1:252],y,[1:252],z);Legend('不含噪声的输出序列','含噪声的输出序列');figure(2)plot([1:63],g_k,[1:63],Eg);Legend('脉冲响应估计值','脉冲响应理论值');4 数据记录表1脉冲响应估计值与脉冲响应理论值的比较t 1 2 3 4 5 6 7脉冲响应估计值0.79 0.92 1.02 1.04 1.05 1.01 0.92 脉冲响应理论值 2.03 3.52 4.59 5.32 5.77 6.02 6.11 t 8 9 10 11 12 13 14脉冲响应估计值0.87 0.80 0.74 0.65 0.57 0.50 0.42 脉冲响应理论值 6.07 5.94 5.74 5.49 5.21 4.91 4.60 t 15 16 17 18 19 20 21脉冲响应估计值0.33 0.23 0.17 0.10 0.05 -0.01 -0.06 脉冲响应理论值 4.29 3.99 3.69 3.40 3.12 2.86 2.62 t 22 23 24 25 26 27 28脉冲响应估计值-0.10 -0.16 -0.19 -0.22 -0.25 -0.29 -0.28 脉冲响应理论值 2.39 2.18 1.98 1.80 1.63 1.48 1.33 t 29 30 31 32 33 34 35脉冲响应估计值-0.30 -0.31 -0.32 -0.36 -0.37 -0.39 -0.41 脉冲响应理论值 1.20 1.09 0.98 0.88 0.79 0.71 0.64 t 36 37 38 39 40 41 42脉冲响应估计值-0.44 -0.46 -0.47 -0.46 -0.49 -0.51 -0.52 脉冲响应理论值0.58 0.52 0.46 0.41 0.37 0.33 0.30 t 43 44 45 46 47 48 49脉冲响应估计值-0.53 -0.54 -0.55 -0.55 -0.56 -0.54 -0.56 脉冲响应理论值0.27 0.24 0.21 0.19 0.17 0.15 0.13 t 50 51 52 53 54 55 56脉冲响应估计值-0.57 -0.57 -0.56 -0.57 -0.57 -0.56 -0.55 脉冲响应理论值0.12 0.11 0.10 0.09 0.08 0.07 0.06 t 57 58 59 60 61 62 63脉冲响应估计值-0.53 -0.52 -0.53 -0.52 -0.53 0.00 0.61 脉冲响应理论值0.05 0.05 0.04 0.04 0.03 0.03 0.035 曲线打印图1 信噪比随着周期数增大的变化图2 脉冲响应计算误差随着周期数增大的变化图3 加入噪声前后的输出序列比较图4 脉冲响应理论值与估计值的比较6 结果分析6.1 信噪比脉冲响应计算误差随周期的变化随着周期数的增加,信噪比减小,说明噪声随着周期数的增加变得更强烈,而计算误差的减小表示周期数的增加使得不确定因素的影响减小,使得计算结果与实际更接近。
6.2 加入噪声前后的输出序列比较加入噪声前后的变化并不大,说明噪声对输出序列影响不大,在第二个周期之后输出序列变得稳定,具有周期变化。
6.3 脉冲响应理论值与估计值的比较随着时间的增加,脉冲响应理论值与估计值全部变小,且差值变小,与实验前的理论推导一致。