B题 声音导引系统 (四川.西南科技大学)
23.4.1科技创新实践学生作品 - 电子设计-声音导引系统
2009全国大学生电子设计竞赛(江苏赛区)题目:B题--声音导引系统2009年9月声音导引系统(B题)摘 要:声音导引系统采用PIC16F877单片机和AT89S52做为主控制器,以自制的车体载上扬音器作为移动声源,依靠两个步进电机作动力,利用驻极体咪头及其外围电路接收并检测声音,经地面监测单片机处理后将声源距离Ox线(或O'y线)的偏差信号经无线传送给小车,经单片机控制对声源的行径路线进行精确调节,控制小车准确停在给定点上。
该系统除了完成题目所规定的基本要求外,还完成了液晶模块、无线通信的设计和调试,充分体现了检测、传感以及精确控制等技术在自动控制中的作用。
关键词:声音导引,驻极体咪头,检测声音,自动控制一、方案论证与选择1、主控芯片的确定主控芯片是整个系统的核心,通过外部采样决定整个系统的工作情况。
由于题目对通信和控制精度的要求比较高,因此主控芯片要能保证系统的稳定及达到系统的要求。
本题中需要应用两块主控芯片。
方案一:均采用89S52单片机作为主控制器。
优点:价格低廉,程序资源丰富,技术比较成熟,使用方便。
缺点:运算速度慢,程序储存空间小,数字外设少,抗干扰能力差,只有两个外部中断入口,不能实现对三个声音传感器的中断响应,且接口电路比较复杂。
方案二:均采用Microchip公司的PIC16F877A单片机。
优点:运行速度快采用RISC精简指令技术,低工作电压,低功耗,I/O口有较大的驱动能力,具有丰富的接口资源,配置了3个功能较强的多功能定时器模块,嵌入看门狗定时器,具有很强的抗干扰能力,同时还具有4个电平跳变中断输入,体积小,在线调试能力强。
缺点:价格偏高。
方案三:移动声源(即智能小车)上使用89S52单片机,地面监控部分使用Microchip公司的PIC16F877A单片机。
综合应用了两者的优点,使用89S52单片机控制小车的行径,控制简单方便;使用PIC16F877A进行数据采集并处理,并通过无线装置与89S52单片机通信,控制更为精确可靠。
声音导引系统(B题)
编号:B甲1043声音导引系统(B题)学校:山东大学参赛队员:刘树林赵洋孙建凯指导老师:陈言俊秦峰王延伟文稿辅导老师:陈言俊声音导引系统(B题)摘要:本文介绍以AT89S52单片机为核心的智能声音导引小车系统,整个系统使用两片AT89S52单片机实现移动声源与三个基站的无线通讯。
电机驱动部分采用NEC公司生产的MMC-1驱动芯片级联L298构成。
声源部分采用无源蜂鸣器发出频率为16KHz的声音,三个基站分别安装压电陶瓷片检测蜂鸣器发出的声音,并将检测到得数据通过无线数传模块A7105传送到移动声源上的主控单片机。
主控单片机据此调整小车的运行。
实现声音导航。
ABSTRACT:This article introduces the AT89S52microcontroller as the core of the Smart Sound Guided Vehicle System,the entire system uses two AT89S52MCU moving sound source and the three base stations in wireless communication. Motor-driven part of the adoption of NEC's production of MMC-1cascade L298driver chip composition.Buzzer sound source part of the passive voice to issue a frequency of16KHz,three base stations were installed electrets detected buzzer sounds,and was detected in the data transmitted through the wireless module to the moving sound source master microcontroller.Host microcontroller to adjust the operation of car.To achieve voice guided navigation关键词:声音导航,无线通讯,NECK eywords:Voice guided navigation,wireless communication,NEC1.总体模块方案的论证与比较1.1主控部分的选择与论证方案(一):声源的主控核心采用AT89S52单片机,分别安装在移动声源部分和基站接收部分。
西南科技大学试题(B卷)参考答案

西南科技大学试题(B卷)参考答案课程名称:《光电子技术》课程代码:1695命题人:命题组学院:理学院专业班级:光信息科学与技术2004级学号:共3页第页一、选择题(10分,2分/题)1、电磁波具有的性质有(A、B、C、D)A. 电场、磁场和波的传播方向满足右手定则B. 具有偏振C. 电场和磁场相位同步D. 电场与磁场存在相互依存关系2、图像通信系统主要由图像输入设备、(A、B、C、D)等组成。
A. 编码器B. 调制器C. 信道D. 显示终端3、在光线作用下,半导体的电导率增加的现象属于( D )A. 外光电效应B. 内光电效应C. 光电发射D. 光导效应4、厨房宜采用哪种形式的火灾报警探测器( C)A. 感温探测器B. 火焰探测器C. 感烟探测器D. 离子感烟探测器5、成像转换过程需要研究的有(A、B、C、D)A. 能量B. 成像特性C. 噪声D. 信息传递速率二、判断题(10分,2分/题)6、大气分子在光波电场的作用下产生极化,并以入射光的频率作受迫振动。
(√)7、某些晶体在外加电场的作用下,其折射率将发生变化,当光波通过此介质时,其传输特性就受到影响而改变,这种现象称为电光效应。
(√)8、光电池是利用光生伏特效应,直接将光能转换为电能的光电器件。
(√)9、热辐射光纤温度探测器是利用光纤内产生的热辐射来探测温度的一种器件。
(√)10、等离子体显示器缺点是每一个像素都是一个独立的发光管。
(√)三、填空题(10分,2分/题)11、处于空腔单位体积内,频率位于ν附近单位频率间隔的光波模式数为 3c 28πυ12、若超声频率为f s ,那么光栅出现和消失的次数则为2 f s ,因而光波通过该介质后所得到的调制光的调制频率将为声频率的 2 倍。
13、微光光电成像系统的核心部分是 微光像增强器件 。
14、 向列型 液晶由长径比很大的棒状分子组成,保持与轴向平行的排列状态。
15、光电二极管按结构分有 同质结与异质结光电二极管 。
声音引导系统(B题)设计报告

声音引导系统(B题)摘要:为了满足声音引导系统的设计要求,进行了各单元电路方案的比较论证及确定,系统以凌阳16位单片机SPCE061A作为电动车的控制核心,控制小车运动。
采用MMC-1为电机驱动芯片,用AT89S52单片机控制接收器模块。
选用无线收发模块将S52单片机的处理数据传回SPCE061A单片机。
对于关键的小车动力部分,经过充分比较、论证,最终选用了价格便宜,性能稳定的直流电机。
以声音信号的发送和无线传送设备实现小车的运动过程。
光电指示模块通过发光二极管和凌阳语音系统来指示下车,是否到达指定位置。
最后的实验表明,系统完全达到了设计要求。
关键词:Abstract:Key word:1.系统方案:1.1 实现方法本题要求设计并制作一移动声源(小车),能实现小车发出声音后开始运动到达指定位置OX后停止,同时运动过程中的平均速度大于5cm/s。
到达指定位置OX线之间的定位误差小于3cm/s。
并且小车运动过程中不能超过OX线左侧5cm/s。
到达后有明显的光声指示。
上述各模块的方案论证如下:1.2 方案论证1.2.1 小车控制器模块方案一:采用ATMEL 公司的AT89S52。
51单片机价格便宜,应用广泛,但是功能单一,系统需要增加语音功能,还需外接语音芯片,实现较为复杂;另外51 单片机需要仿真器来实现软硬件调试,较为烦琐。
方案二:采用凌阳公司的SPCE061A 单片机作为控制器的方案。
该单片机I/O 资源丰富,并集成了语音功能。
芯片内置JTAG电路,可在线仿真调试,大大简化了系统开发调试的复杂度。
根据本题的要求,我们选择第二种方案。
1.2.2 声音接收器控制模块方案一:采用凌阳公司的SPCE061A 单片机作为控制器的方案。
单片机自带强大的语音,和在线仿真。
但价格昂贵,系统复杂,难于控制。
方案二:用ATMEL 公司的AT89S52,51单片机功能不够强大,但对与本体要求可以实现,同时价格低,技术成熟,性能稳定。
声音引导系统

声音导引系统中文摘要:本系统为实现以声音引导小车按预定方案运行而设计。
系统采用51最小系统板作为此系统的检测核心和控制核心,通过对声音信号的检测,准确实现小车坐标定位,并通过无线发射接收模块将坐标信息传送至车载MCU,实现小车的声音引导控制。
小车无线传输模块采用集成nrf24l01模块,以期实现坐标信息实时无线传输。
电机驱动、控制模块采用ASSP芯片以及分离MOS管H桥电路使电机的控制精确、稳定。
声音检测模块则采用多级放大滤波电路接收三路声音信号准确检测,并将此信号传送至地面控制MCU进行坐标定位。
1 系统方案设计1.1 AT89S52系列单片机系统方案采用两块AT89S52单片机系统,车载单片机实现声音信号的发送,无线信号的接受,以及电机驱动芯片的控制。
陆基单片机完成三路声音信号捕获,处理并将小车坐标信息通过无线发射。
系统编程容易,性价比高。
1.2 MSP430单片机系统方案采用MSP430单片机系统作为控制的核心,来实现智能小车无线传输、声音处理、电机驱动等功能。
1.3系统方案比较AT89S52系列单片机系统方案价格低廉,技术比较成熟,使用简单,应用广泛,而且能较好的实现系统的要求。
MSP430系统方案功耗虽然较低,但编程比较复杂,价格昂贵,因而,决定采用该方案1。
1.4 AT89S52单片机系统方案设计本设计采用AT89S52单片机作为核心控制系统,以直流电机为驱动,结合无线、声音处理模块完成设计任务。
系统可以划分为以下几个基本模块:无线数据传输、小车控制、声音检测处理、信息显示模块。
系统设计框图如图:图1.0系统方案框图1.5 方案选择(1)电机驱动模块方案一:采用两个步进电机,步进电机的准确定长步进性能方便的实现调速和转向,步进电机的输出力距较低,价格较高,而且步进电机的编程复杂,硬件连接的工作量大。
方案二:利用一个直流减速电机,具有转矩大,驱动力大,控制简单等特点。
经比较验证,显然方案一电机的机械结构难以满足题目的要求,而方案二利用直流电机完全能满足要求。
声音导引系统(B题)

声音导引系统(B题)摘要:系统采用两片STC89C52单片机分别作为主从控制器,电动小车搭载蜂鸣器构成可移动声源,声音信号被驻极体话筒感知后再加以后续放大、滤波,构成声音检测模块。
从机控制声源发声,主机接收到声音信号后经无线通信向其发出距离误差信号,从机对该信号进行处理,采用差值控制法控制电动小车运动,从而实现对声源的导引功能。
经测试,系统运行时,声源最大平均速度能达到12.8cm/s,最小定位误差小于1.0cm。
当声源以平均速度大于10cm/s速度运行时,任意时刻不会超过直线Ox左侧2cm。
此外,系统还加入了液晶显示、语音提示等人机交互界面。
关键词:STC89C52 声音检测差值控制法声音导引目录1.系统设计 (4)1.1设计任务与要求 (4)1.2设计分析 (4)1.3各模块方案论证和选择 (4)1.3.1运动平台的选择 (4)1.3.2控制器模块 (4)1.3.3电机驱动模块 (4)1.3.4 发声模块 (4)1.3.5 声音接收模块 (5)1.3.6 无线通信模块 (5)1.3.7 速度检测模块 (5)1.3.8 数据显示模块 (5)1.3.9 声光提示模块 (5)1.4小结 (5)2.系统的硬件实现 (6)2.1电机驱动电路 (6)2.2发声模块电路 (6)2.3声音接收电路 (6)2.4速度检测电路 (6)2.5无线通信电路 (7)3 理论分析与计算 (7)3.1控制策略分析 (7)3.2控制理论计算 (7)4.系统的软件设计 (8)4.1主程序 (8)4.2距离测量子程序 (8)4.3无线通信子程序 (8)4.4电机驱动子程序 (8)5. 系统测试 (8)5.1测试仪器 (8)5.2系统整体测试数据 (8)5.2.1基本部分测试 (8)5.2.2发挥部分测试 (9)5.3系统整体测试结果分析 (9)6 结论 (9)参考文献: (10)附录一:使用说明 (11)附录二:元器件清单 (12)附录三:电路原理图及印制版图 (13)附录四:程序流程图 (19)附录五:程序清单 (24)1.系统方案设计及论证1.1设计任务与要求设计要求与任务详见2009全国大学生电子设计大赛试题(B 题)。
声音导引系统
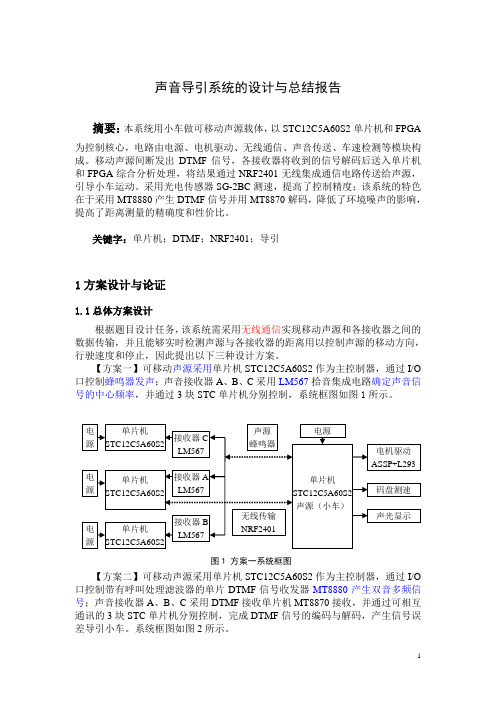
声音导引系统的设计与总结报告摘要:本系统用小车做可移动声源载体,以STC12C5A60S2单片机和FPGA为控制核心,电路由电源、电机驱动、无线通信、声音传送、车速检测等模块构成。
移动声源间断发出DTMF信号,各接收器将收到的信号解码后送入单片机和FPGA综合分析处理,将结果通过NRF2401无线集成通信电路传送给声源,引导小车运动。
采用光电传感器SG-2BC测速,提高了控制精度;该系统的特色在于采用MT8880产生DTMF信号并用MT8870解码,降低了环境噪声的影响,提高了距离测量的精确度和性价比。
关键字:单片机;DTMF;NRF2401;导引1方案设计与论证1.1总体方案设计根据题目设计任务,该系统需采用无线通信实现移动声源和各接收器之间的数据传输,并且能够实时检测声源与各接收器的距离用以控制声源的移动方向,行驶速度和停止,因此提出以下三种设计方案。
【方案一】可移动声源采用单片机STC12C5A60S2作为主控制器,通过I/O 口控制蜂鸣器发声;声音接收器A、B、C采用LM567拾音集成电路确定声音信号的中心频率,并通过3块STC单片机分别控制,系统框图如图1所示。
图1 方案一系统框图【方案二】可移动声源采用单片机STC12C5A60S2作为主控制器,通过I/O 口控制带有呼叫处理滤波器的单片DTMF信号收发器MT8880产生双音多频信号;声音接收器A、B、C采用DTMF接收单片机MT8870接收,并通过可相互通讯的3块STC单片机分别控制,完成DTMF信号的编码与解码,产生信号误差导引小车。
系统框图如图2所示。
图2 方案二系统框图【方案三】可移动声源采用单片机STC12C5A60S2作为主控制器,通过I/O 口控制带有呼叫处理滤波器的单片DTMF信号收发器MT8880产生双音多频信号;声音接收器A、B、C采用MT8870信号收发器电路,各声音接收器用有线连接并通过FPGA和STC单片机组成的小系统统一控制,完成DTMF信号的编码与解码,产生信号误差导引小车。
声音导引系统

基于STM32控制的声音导引系统摘要:设计了一个基于STM32控制的声音导引系统。
该系统由1个可移动声源S和3个声音接收器A、B、C构成。
由一片从控STM32单片机控制无线发送模块,实现声音导引信号的发送。
主控单片机根据无线接收模块所接收到的信息来判断可移动声源运动的启停。
关键词:无线收发模块;STM32单片机;声音导引;移动声源引言声音导引系统,主要是靠声音来完成对机器的智能控制,既方便又快捷。
尤其是环境比较恶劣、不适合人类停留的地方,可以依靠声音来控制机器的正常运行。
声音导引系统也是智能化控制的一个方面,对未来的智能化发展有较大的促进作用,对未来智能机器人的研究也大有帮助。
1 系统总体方案如图1所示,声音导引系统由1个可移动声源S,声音接收器A、B和C构成。
其中,可移动声源由发声模块和无线接收模块组成;A、B、C三处各放置一个声音接收器。
针对系统设计要求,可以采用以下实现方案:在O点设置一个STM32单片机控制器,作为A、B、C三个声音接收器的公共控制器,并通过一个公共无线发送模块向可移动声源发送反馈信号。
可移动声源开始运动并发出声音后,声音接收器A、B和C收到声音,将声音信号分别传送给STM32单片机,由STM32单片机判别A、B和C哪个声音接收器先接收到该声音信号。
若声音接收器B先收到,则不发送反馈信号给可移动声源。
一旦声音接收器A先收到声音信号,表明可移动声源已经在定位误差的范围内到达Ox线,无线发送模块立即向可移动声源发送反馈信号,可移动声源接收到该信号后,立即停止运运动。
该方案电路简单,只需要一套无线收发系统,因此也节约了成本。
2 系统硬件设计本系统中,可移动声源由EDC-CarX V1.0-2007.06四驱版DIY竞赛小车、日本NEC 电机控制ASSP芯片MMC-1、STM32 Cortex-M3系列单片机、无线接收模块、天线、蜂鸣器组成;音频接收模块、无线发送模块、天线组成声音接收器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考位置
改进 PID 控制器
可移动声源
声源位置检测 图 2 控制系统示意图
1.3 软件设计方案
开始
初始化选择工 作模式(Mode)
工作模式 (Mode)
Mode = 1
使能目标队列 1小车直线、
正向行进
Mode = 2
使能目标队列 1小车直线、
反向行进
Mode = 3
使能目标队 列2小车曲线 、正向行进
y/cm
X
C(0,100)
r3 S(x,y) W
r1
r2
A(0,0)
O
B(100,0) x/cm
图 6 声源定位原理
x2 y2 r12 , (x 100)2 y2 r22 , x2 ( y 100)2 r32
(2)
x (r1 r2 )(r1 r2 ) / 200 50 , y (r1 r3)(r1 r3) / 200 50
测量项目
第一次
பைடு நூலகம்
第二次
第三次
到 OX 线的垂直距离(cm) 25.00 35.00
40.00
到达 OX 轴的时间(S)
2.22
3.04
2.97
平均速度(cm/S)
11.25 11.50
13.45
超 过 OX 轴 左 侧 的 距 离 1.50
1.32
1.56
(cm)
定位误差(cm)
0.50
0.45
0.68
声音导引系统
西南科技大学 姜军 周仁彬 丁华建 赛前辅导教师:张华 文稿整理辅导教师:王姮 梁艳阳
摘要:系统以 AVR 系列 Mega88 为主控模块,采用 NEC 的电机控制芯片 MMC-1 控制 L298N,实现可移动声源的运动控制。主控模块通过 PWM 控制 L298N 驱 扬声器发音,同时接收接收器反馈的声源位置信息,经滤波处理并计算出声源当 前的位置以及得到新的运动方向后,通过 PID 位置控制算法控制步进电机实现可 移动声源的高速高精度声音引导定位。 关键字:声音引导,运动控制,PID 算法
3.3 步进电机驱动模块
步进电机的驱动模块如图 8 所示。
主控 Mega88 单片机
电机控制模块 MMC-01
功率驱动 ICL298N
步进 电机
负载
中断信号
图 8 步进电机驱动模块示意图
3.4 声源模块
声音发声模块如图 9 所示。
主控 Mega88 单片机
声音发声驱动 ICL298
扬声器
图 9 声音发生模块
Abstract: The designed system realizes the motion control of the mobile sound source based on main process unit (MPU) AVR Mega88 MCU and NEC’s motor control chip MMC-1 controlling L298N chip. The MPU controls L298N by PWM method to drive the speaker, receiving feedback information from the receiver, and calculate the sound source’s current location and the moving direction after information filtering. Afterward, the high-speed high precision steering control according to sound source can be implemented through the PID control for stepping motor. Keywords: guide by sound, motion control, PID algorithm.
(3)
2.2 控制系统
1)位置误差信号及可移动声源方向的确定
根据图 6,当声源位置 S(x,y)确定后,可计算出位置误差为 Ex 0.5 Sx 。
当主控模块检测到系统运动至 3-5cm 时,即可获得起始位置到当前位置之 间的矢量,从而得到可移动声源的方向,即可任意设定可移动声源的初始角度。 2)可移动声源的运动控制
4
U2A
LM358AN
A
1
C5
R10 1uF 6.2K
GND
GND
GND GND
GND
图 11前级滤波放大电路
4 测试结果及分析
P5
2 1
Header 2
4.1 测试数据
测试仪器:
秒表一个(精度:0.01s),钢尺一把(精度:1mm) 测量结果如表 1~3 所示。
表 1 声源距离测量数据表
测量项目
第一次 第二次
控制;若用直流电机进行位置控制,会给系统设计增加较大的难度,因此不考虑
用直流伺服电机。 4)主控模块:使用 ATMage88 单片机。AT51 单片机位操作功能强大,但内
部 12 分频,使运行效率降低,内部存储空间不大;凌阳系列单片机资源丰富、 运行速度比较快,但单片机成本较高;DSP、FPGA 等高级控制器具有强大的功 能,但功耗很大,芯片价格较高;而 AVR 单片机,网络上技术资料很多,内部 资源丰富,性价比较高。故采用 AVR 单片机。
在单音频下,用电机驱动 ICL298 驱动扬声器,可以用 PWM 波控制 L298 使 扬声器有较大的发音功率,并可以方便的调整发音 PWM 的占空比和频率,使拾 音器发出响亮的声音。
3.5 声源接收模块
用与发音扬声器相同型号的扬声器作为拾音器,利用扬声器的共振可以有效 提高信号的信噪比。接收器声音信号处理流程如图 10,接收拾音器采集的声音 信号通过二阶有源带通滤波器和前级放大之后,通过比较器产生方波信号触发单 片机中断完成声音的采集,部分电路图如图 11。
拾音器
二阶有源带 通滤波器
前级放大
比较器产生 方波信号
图 10 声音接收部分电路
接收处 理器
5V
VCC
R4
330 C9
C8
47uF
47uF
MIC1 MIC
R25 3K3
R5 1K
C13 R24 102 1K
R1 100K VCC
8
C4
1uF R9 100K
R7
2
10K 3
C6 10uF R12
100K
第三次
第四次
测量距离(mm)
49.9 57.8
71.1
88.9
实际距离(mm)
50.0 60.0
70.0
80.0
第五次
147.5 150.0
表 2 基础部分测试数据表
测量项目
第一次
第二次
第三次
到 OX 线的垂直距离(cm) 25.00 35.00
40.00
到达 OX 轴的时间(S)
2.45
3.14
3.48
第四次
45.00 2.94 15.32 1.87
滤波以及 LM393 比较器产生方波信号,以触发单片机中断,实现对声音信号的 采集。(方案三)在方案二的基础上,用与发音扬声器相同型号的扬声器作为拾
音器代替驻极体,利用扬声器的共振可以有效提高信号的信噪比。相比之下,采
用方案三。 2)车体结构:可移动声源的车体结构采用 3 轮双驱后置方案。相比双轮前
本系统运动控制采用改进的 PID 算法。控制原理图如图 7 所示。由于固定参 数的 PID 控制器不能很好同时实现可移动声源位置的高速高精度控制,所以本设 计采用可调参数的改进型 PID 控制算法对可移动声源的方向和速度进行控制,最 终实现精确位置控制。
该改进型PID控制算法的参数(K p ,K i ,K d )共有“大中小”三组值,其调整 或切换规则如下:(1)当误差较大且误差变化率较小,采用最大的一组PID参数; (2)当误差较小且误差变化率较大,采用最小的一组PID参数;(3)其他情况, 采用中等大小的一组PID参数。
t
0 T1 T2
图 5 声音信号处理基本过程
2)声源定位原理 声源定位原理如图 6 所示。以A为原点,AB方向为x轴正方向,AC方向为y 轴正方向,建立平面直角坐标系。根据声源检测原理获得声源到接收器A、B和C 的距离r1、r2和r3,建立方程(2)。求解方程(2)可得到式(3)所示的声源S 在直角坐标系的坐标(x,y)。
本检测系统采用计时的方式检测声源到接收机之间的距离。首先接收器通过
无线通信模块向声源模块发送发声命令,同时开始计时(t0),声源模块接收到 命令后以最快响应速度驱动扬声器发声,接收器接收到扬声器的声音后,立即停
止计时,并记此时刻为t1,然后计算声源到接收机之间的距离S,公式如式(1) 所示。最后,接收器将距离S通过无线通信模块发送给声源模块。
驱,双轮后驱有利于可移动声源的灵活运动;而四轮车转弯性能稍差,故不采用
双轮前驱和四轮车的设计方案。根据任务需求,车体要做得比较规范,尽量的小。 3)电机及其驱动方式:采用步进电机。步进电机控制简单,用 NEC 的 MMC-1
可以简单实现步进电机的驱动,用 74HS402-02 步进电机,功率 30W,功率较大, 在负上一个大扬声器后仍有足够的驱动能力,不容易丢步,可以完成精确的行程
S (t1 t0 T )
(1)
其中, T 为系统固有延时, 为声音在空气中的传输速度。
为提高检测的可靠性和精度,需对接收到的声音信号进行处理。先对信号进
行放大,再经二阶有源带通滤波处理,用比较器产生方波信号,触发单片机中断。
基本过程如图 5 所示。