基于ARM7的声音导引系统的设计
声音导引系统设计方案
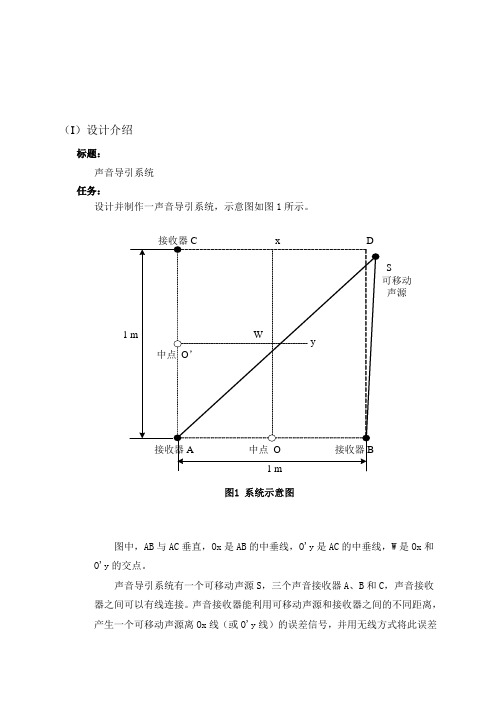
(I)设计介绍标题:声音导引系统任务:设计并制作一声音导引系统,示意图如图1所示。
图1 系统示意图S可移动声源图中,AB与AC垂直,Ox是AB的中垂线,O'y是AC的中垂线,W是Ox和O'y的交点。
声音导引系统有一个可移动声源S,三个声音接收器A、B和C,声音接收器之间可以有线连接。
声音接收器能利用可移动声源和接收器之间的不同距离,产生一个可移动声源离Ox线(或O'y线)的误差信号,并用无线方式将此误差信号传输至可移动声源,引导其运动。
目标:(1)制作可移动的声源。
可移动声源产生的信号为周期性音频脉冲信号。
(2)可移动声源发出声音后开始运动,到达Ox线并停止,这段运动时间为响应时间,平均速度大于5cm/s。
(3)可移动声源停止后的位置与Ox线之间的距离为定位误差,误差小于3cm。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧的距离小于5cm。
(5)可移动声源到达Ox线后,有声光指示。
(6)接收器端有LCD屏实时显示小车的位置(图示)及相应数据。
特点:本设计源于2009年全国大学生电子设计竞赛试题,所要设计的系统类似于无线电定位系统,具有一定的实用价值。
经过我们的思考及讨论,在原有的设计基础之上增加了上述目标(6)中LCD显示小车位置的功能。
本设计增加的这一功能模仿GPS导航技术,达到图像显示位置的效果。
(II)系统组成系统组成如图2所示,在系统设计中采用两块单片机分别作为可移动的声源的检测和控制核心。
通过单片机(MCUl)对接收器接收到声源信号的时间做处理,检测出当前小车的位置,同时将小车数据通过LCD实时显示,最后通过无线发送给MCU2。
MCU2根据当前的位置控制电机的转速及转向,当停止下来时给出相应的声光提示。
(III )软件流程a) 软件设计说明软件系统包括可移动声源控制软件和声源接收模块控制软件两部分。
可移动声源控制系统软件包括误差信号判决子程序和各运动调整子程序等。
声音导引系统的设计

目录摘要 ................................................................................................................................. Abstract .. (I)第1章绪论 0研究背景及意义 0自动导引小车的研究背景 (1)自动导引小车的研究意义 (2)国内外自动导引小车发展的历史与现状 (3)国外自动导引小车发展的历史与现状 (3)国内自动导引小车发展的历史与现状 (4)本文主要研究的主要内容 (5)本章小结 (6)第2章方案的设计与论证 (7)系统方案设计 (7)方案论证 (7)主控系统选择 (8)电机控制系统的选择 (8)无线数据通信选择 (9)音频信号产生单元选择 (9)音频信号接收单元选择 (9)电源选择 (10)本章小结 (10)第3章系统硬件电路的设计 0系统组成 0STC89C52的介绍 (1)单片机最小系统设计 (2)声音发射模块设计 (3)声音接收模块的设计 (5)无线收发模块的设计 (6)电机驱动电路的设计 (8)显示模块的设计 (10)电源模块的设计 (11)避障电路的设计 (12)本章小结 (12)第4章系统软件的设计 (13)软件设计 (13)Keil uvision3简介 (13)主机程序设计 (14)声音定位原理分析 (14)信号处理及转换 (15)附录1 (20)附录2 (21)附录3 (22)摘要声音引导系统,是基于无线通信技术的新型导引系统,可以应用在新型智能机器人控制系统,这种声音控制机器人的运动方式将有着广阔的应用前景。
声音引导(声音定位),在现实生活中有着重要意义。
例如,在救援抢险中,可以利用声音传感器接受某一特定幅度或者频率的声音,通过对声音源的分析处理来获知其地理位置,配合GPS卫星定位技术来搜救目标源。
本设计的声音引导系统可实现对一定范围内的可移动声源进行定位和引导其移向预定区域。
基于ARM的语音录放系统的设计

目录1 引言 (1)1.1 课题背景 (1)1.2 课程设计目的 (1)1.3课程设计意义 (2)1.4 系统功能说明 (2)2 系统模块设计 (3)2.1系统工作原理 (3)2.2系统模块设计 (3)3 系统模块介绍 (4)3.1 ARM控制模块 (4)3.2语音芯片ISD4004 (6)4 系统调试 (9)4.1硬件调试 (9)4.2 软件调试 (9)4.3 系统设计流程 (11)5 试验结果 (13)结束语 (14)致谢 (15)参考文献 (16)附录 (17)1 引言1.1 课题背景开发在生活和生产的各个领域中,凡是有自动控制要求的地方都会有单片机的身影出现;然而随着时代的进步与发展,如今普通的8位单片机已经无法满足需求,因为其资源有限,而且系统时钟速度慢,导致许多问题无法及时解决,加之内部的储存容量很小使得在编写程序时不得不考“精简”。
现在ARM的应用已经越来越普及,因为它的高性能使之得到很多人的青睐,因此选用ARM来作为控制器。
ARM的应用有利于产品的微型化、多功能化和智能化,有助于提高劳动效率,减轻劳动强度,提高产品质量,改善劳动环境,减少能源和材料消耗,保证安全等。
但是,对于ARM的应用的意义绝不仅限于它的广阔范围以及所带来的经济效益上,更重要的意义还在于ARM的应用正从根本上改变着传统的控制系统设计思想和设计方法。
从前必须有模拟电路或数字电路实现的大部分功能,现在已能使用ARM通过软件(编程序)方法实现了。
这种以软件取代硬件并提高系统性能的控制系统“软化”技术,称之为微控制技术。
微控制技术是一种全新的概念,是对传统控制技术的一次革命。
随着ARM应用的推广普及,微控制技术必将不断发展、日益完善和更加充实。
高档的ARM芯片还能建立操作系统平台,使之更加强大。
具有很强的实时性和完美的人机界面,同时其软硬件可以根据需要进行裁剪,具有很强的灵活性。
1.2 课程设计目的传统的语音录放需要经过如下过程:语音信号经过设备接受后转化为模拟电信号,通过前置放大器把语音信号放大,通过带通滤波之后,去掉多余的干扰,再经过自动增益控制和A 压缩电路净化输入的模拟电信号,而后经A/I)转换器转换为数字信号,由控制器对其进行处理和存储,之后再由D/A转换为模拟信号,达到放音的目的。
基于ARM7的嵌入式音频处理系统的设计

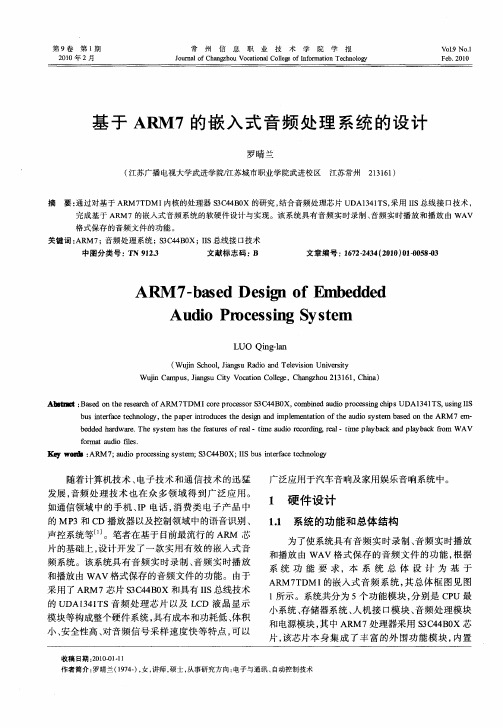
第9卷第1期2010年2月常州信息职业技术学院学报Journal of Changzhou Vocational College of Information Technology Vol.9No.1Feb.2010收稿日期:2010-01-11作者简介:罗晴兰(1974-),女,讲师,硕士,从事研究方向:电子与通讯、自动控制技术基于ARM 7的嵌入式音频处理系统的设计罗晴兰(江苏广播电视大学武进学院/江苏城市职业学院武进校区江苏常州213161)摘要:通过对基于ARM7TDMI 内核的处理器S3C44B0X 的研究,结合音频处理芯片UDA1341TS ,采用IIS 总线接口技术,完成基于ARM7的嵌入式音频系统的软硬件设计与实现。
该系统具有音频实时录制、音频实时播放和播放由WAV 格式保存的音频文件的功能。
关键词:ARM7;音频处理系统;S3C44B0X ;IIS 总线接口技术中图分类号:TN 912.3文献标志码:B文章编号:1672-2434(2010)01-0058-03ARM 7-based Design of EmbeddedAudio Processing SystemLUO Qing-lan(Wujin School ,Jiangsu Radio and Television UniversityWujin Campus ,Jiangsu City Vocation College ,Changzhou 213161,China )Abstract :Based on the research of ARM7TDMI core processor S3C44B0X ,combined audio processing chips UDA1341TS ,using IISbus interface technology ,the paper introduces the design and implementation of the audio system based on the ARM7em-bedded hardware.The system has the features of real -time audio recording ,real -time playback and playback from WAV format audio files.Key words :ARM7;audio processing system ;S3C44B0X ;IIS bus interface technology随着计算机技术、电子技术和通信技术的迅猛发展,音频处理技术也在众多领域得到广泛应用。
基于AVR单片机的声音导引系统的设计

鸣器提供高低电平 , 发出声音信号; 声音接收器采 用常用的驻极体话筒,其收到的信 号经过放l 去 火、 噪、 频率电压转换以及对接收器之间接收信号的时 间进行比较可以实现对声源的定位。 主单片机通过 与从单片机之间的无线通讯将控制数据传送给从
科
李福全 杜义浩
科技 论坛 f f f
王 亮 字 文 芬
基于 A R单片机 的声音 导 引系统 的设 计 V
( 黑龙江八一农垦大学信息技术 学院, 黑龙 江 大庆 13 1 ) 63 9
摘 要: 本设计利用 AV R单片机设计开发 的声音导引 系统, 能过主单片机与从 单片机之 间的无线通讯将控 制数据传送给单片机 , 可以实现声 源位 移 的 控 制 。本 系统 具有 数 据 处理 、 实时 采样 、 制 准 确等 功 能 . 控 . 关键词 : 片机 ; 单 无线通讯; 步进 电机 ; 带通滤波 a
1 案选择 方 1 声源 的选择 . 1
Байду номын сангаас
一
只 在 饱 和 和 截 止 状态下, 效率非伟
声源可以采用超声波传感器和普通传感器。 高 , 利 于节 省毹 有 其中超声波传感器的特点是传输距离理想n接受 源 。 在市场上也 现 器收到的声音信号失真小。 但考虑到超声波传感器 有 相 应 的成 品 出 发射的声波信号几_ 乎是直线传输,而且成本较高, 售 ,价格 便 宜 , 使 而韭通的蜂鸣器的特点是工作电路简单, 上电就能 用 起 来简单 方便 。 l 5电机 的 选 发出固定频率的声波, 单片机可以对其进行直接控 制, 而且蜂呜器发出声音的频率为2 Z到 4 Z 择 KH KH 之I 对声音接收器力1 此频率范围的带通滤波器 司, I E 电 机 采 用 步 圉 ‘ 、 d 就可以很好的滤除噪声。基于 b苤 分析, 我们选择 进 电机 步进 电机 a所示。 和 8 1 引脚所接电容为 1u , 0 F 了普通传感器。 个显著的特点就是具行陕速起停能力, 如果负荷 电路图如图() 0 。5引脚输出接阻容整形后可以得到 1 2带通滤 波电路的选择 不超过步进电机所能提供的动态转矩值 , 就能够立 即增益为 2 0 但此部分放大出的信号混 带通滤波电路可以采用有源带通滤波和无源 即使步进电机肩动和停止;- 爪显著托 点是控制精 不失真的音频放大信号, 需进行下一步的滤波处理。.2 2 .带通滤波。 1 带通滤波。 有源带通滤波是 目前常用的带通滤波方 度高, 正反转控制灵活 : 同时步进电机的速度控制 有噪声 , 蜂 n器 发 出 的 声音 频 率 为处 于 2 H 鸟 K Z到 IK Z OH 式, 其滤波效果理想 , 滤波的带宽和中心频率 叮以 更 加方便 , 改变速度 只须改变相 序的频率 即可 。 之间 , 为了滤除噪声 , 提取处于此频率段的有效信 任意选择且电路县体器件的参数容易计算; - 无源带 1 五电源方 案的选择 设计 的二 阶 有源带 通 滤波 电路 ( h ) 中心 图()其 通滤波装置结构简单, 成本较低 , 但是滤波特性受 红本设 汁中 ,由于小 车 的机 动性和灵 活性 更 号 , K Z能够 达 到要求 。图 中 R 、 组 成 1C1 系统参数 的影响较 大 , 极易与 系统或 者其它 滤波支 为重要 , 此 采川单 电 源 。这样供 电 电路 比较 简 频率为  ̄8 H I 路发生 串并 联谐振 。 同时通带的 宽度 中心 频率也 单 ; 是 由于 电动机启 动 瞬间 电流 较大 , R 、2 但 而且 P WM 低 通网络 ,2C 组 成高通 网络 ,两 者串联就 组成 了二阶带通网络。 3频率电压变换。 Z1 带通滤波输 不易计算 , 滤波效果也不是很理想。本设计中采用 驱动 的电动机 电流波动很大 , 会造成 电压不稳 。 出的是固定频率的音频电压信号, 需进行频率电压 有源带通滤波。 2系统 十 r 得 丁 1 3声音接收 器的选择 单片 机 系统 足 整 个 声音 导 引 系 统 的核 心 部 变 换 ,同时为 _ 到与单 片机端 口兼 容的 T L电 声 音接收 器采用驻极体 话筒 。驻极体 话筒 具 分 , 主要 用 于无线 数 据收 发 、 据 处理 、 需要进行电平转换。频率电压变换与电平转换 它 数 实时 采 平, c。经实际测试测出, 当接收到声音 有体积小、 结构简单 、 电声性能好 、 价格低的特点 , 样 、 析 系统参 数 , 制 电机及 对各部 分检 测环 节 的原理图如网() 分 控 属 于最常用的 电容话筒 。 本 f 由于 点是通 过 进行 整 的重 . ~. 8 2 目 系统组成主要包括 A R单片机、 V 无线收 时,频率 电压转换输出端的电压在 1 V 2 V之 检 测声源发 出 的声波来 检 测声源 的位 嚣并控 制声 发 模块 、 器 、 滤波 电路 、 经 M3 9电压比较器( 基准电压设定为 1 V . , 3 扬声 带通 电动 机双桥驱 动芯 间, L 3 输 出接 上 电阻 1K) 电平转换 后得到标 准的 拉 0 进行 源的位移 , 需要 声音接 受器对 声音 具有较 高 的 片 L 2 8和人赛指定电机驱动芯片等. 这就 M9 . .’ rL电平 2 . I . 1 4用于抗于扰的单稳触发电路。 当外 灵敏度,虽然声音接受器的灵敏度 ‘信噪比成反 j 2 系统的硬件设汁 . 1 比 ,但 噪声是 可 以通 过带通滤 波器有效 滤除 的 , 所 输 Z 占频 放大 。驻极体 话筒接收音 频信 号, 界发出强烈声音时 ,系统可能会受到干扰作用 , 1 1 输 使单片机反复进入中断, 为保证 以用驻极体话筒做声音接受器也是可 的 微弱的电压信 y, - 此信号必须经过放大才能被利 出电平产生震荡 , 1 4电机驱动模 块的选择 用。L 8 是专为低损耗电源所设计的功率放大 程序仵两次发声时间间隔内系统不会受到外界的 M36 电机驱动模块采用功率品体管组成的 t 型 器 集成 电路 。 的 建增益 为 2 , 过 1和 8 t 它 0透 引脚 任何干扰, 可以 两次发声的时间加入单稳触发电 用 位 间 电容 的搭配 , 最 路 , 以屏 蔽外界的干 扰。在频率 电压转换 电路后 增益 5定 d 高可达 2 0 L 8 0 。 M36可使 加 一 5 5 时器组成 的单稳 态 触发 电路 ,如 图() 电路输出稳定的低电平, 发声瞬问, 用电池为供应电源 , 输入 所示。无声时, { 产生 I , j 可使用此 上 跳沿触发单片机产 电 压 范 围 可 以 是 其输“ 调节输 出脉 宽略小 于两次 发声之 间 时间间 4 一2 V 1V,无动作时仪消 生中断 , 同时可 耗4 mA电流 , 失真 低 。 隔即可屏蔽掉由于外界干扰而产生的振荡, 且 使系统工作更为 所以我们直接使用 卜了 屏蔽掉带通滤波没有滤掉的噪声 , 21 5电机 驱动 。 考虑到 H型桥 路的电机驱 动 L 8 来 放 大 驻 极体 话 稳定 。 . M3 6 价格便 ( 下转 1 3页 ) 4 筒的输出。 音频放大具_ 芯片市场上有销售 、 { 奉
基于ARM7的嵌入式音频处理系统的设计
小、 安全性高 、 对音频信号采样速度快等特点 , 可以
收 稿 日期 :000 ・1 2 1 -11
和电源模块 , 中 A 7 其 M R 处理器采用 SC 4 O 3 4 B X芯
片, 该芯 片本 身 集 成 了 丰 富 的 外 围功 能模 块 , 内置
模 块等构 成整个 硬件 系统 , 具有成 本 和功耗低 、 体积
系 统 功 能 要 求 , 系 统 总 体 设 计 为 基 于 本 A M7 D 的嵌入式音频系统, R T MI 其总体框图见图
1 示 。系统共分 为 5个 功 能模块 , 别 是 C U 最 所 分 P 小 系统 、 储 器系 统 、 机接 口模块 、 存 人 音频 处 理 模块
第9 卷 第 1 期
21 00年 2月
ห้องสมุดไป่ตู้
常 州
信
息
职 业
技
术
学
院 学
报
VO . NO, 1 9 l Fe . 0 0 b 2 1
J u a fCh n z o c t n lCo lg fI f r t n Te h o o y o r lo a g h u Vo a i a l e o n o ma i c n l g n o e o
随着计算 机技 术 、 电子 技 术 和通 信技 术 的迅 猛 发展 , 音频 处 理 技 术 也 在 众 多 领 域 得 到 广 泛应 用 。 如通信 领域 中的 手机 、P电话 , 费 类 电 子 产 品 中 I 消 的 MP 3和 C 播放 器 以及 控制 领域 中 的语 音识别 、 D 声控 系统等 ¨ 。笔者 在基 于 目前最 流行 的 AR 芯 J M
和播 放 由 wAV格 式保 存 的音 频 文 件 的功 能 , 据 根
基于ARM7的语音采集频谱分析系统的设计实现
272007年第9期(总第55期)E-mail:cmee@263.net中国现代教育装备收稿日期:2007-01-28作者简介:李文炜,男,工学硕士,杭州市质量技术监督局特种设备安全监察处安全监察主管。
基于ARM7的语音采集频谱分析系统的设计实现李文炜1 张 瑛21.杭州市质量技术监督局 浙江杭州 3100062.杭州市特种设备检测院 浙江杭州 310003摘 要:语音采集、频谱分析在生产实践中有着广泛的应用。
本文基于ARM7设计实现了语音采集频谱分析系统,该系统结构简单、使用方便,充分利用了ARM7和PC机强大的数据处理功能对语音信号进行高精度采集和高准确度的频谱分析。
关键词:语音采集 频谱分析系统 ARM7对各类旋转机械、电机、机床等机器的主体或部件进行实际运行状态下的谱分析,可以提供设计数据和检验设计结果,或者找寻震源和诊断故障,从而保证设备的安全运行。
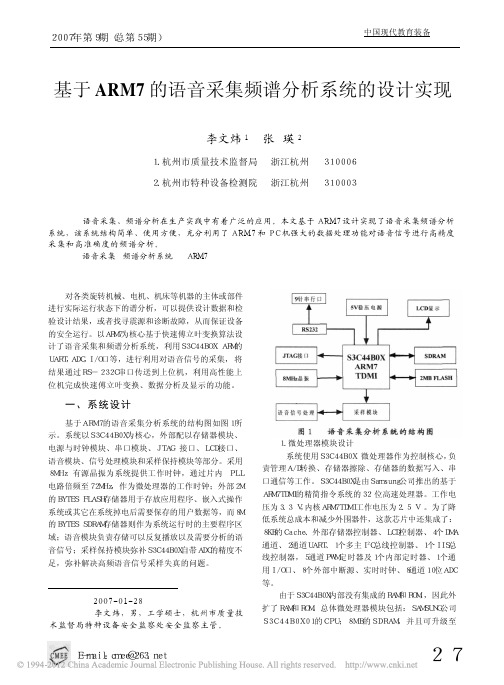
以ARM7为核心基于快速傅立叶变换算法设计了语音采集和频谱分析系统,利用S3C44BOX ARM的UART,ADC,I/O口等,进行利用对语音信号的采集, 将结果通过RS-232C串口传送到上位机,利用高性能上位机完成快速傅立叶变换、数据分析及显示的功能。
一、系统设计基于ARM7的语音采集分析系统的结构图如图1所示。
系统以S3C44B0X为核心,外部配以存储器模块、电源与时钟模块、串口模块、JTAG 接口、LCD接口、语音模块、信号处理模块和采样保持模块等部分。
采用8MHz 有源晶振为系统提供工作时钟,通过片内 PLL电路倍频至72MHz,作为微处理器的工作时钟;外部2M的BYTES FLASH存储器用于存放应用程序、嵌入式操作系统或其它在系统掉电后需要保存的用户数据等,而8M的BYTES SDRAM存储器则作为系统运行时的主要程序区域;语音模块负责存储可以反复播放以及需要分析的语音信号;采样保持模块弥补S3C44B0X自带ADC的精度不足,弥补解决高频语音信号采样失真的问题。
基于ARM7 TDMI的SoC语音处理系统的设计
摘要:基于arm7tdmi的soc片内ac97模块和片外codec-ucb1400,采用itu-t的g.721算法设计语音处理系统;提出一种基于低端risc核的语音系统设计方案。
该方案结合soc的片内esram模块进行性能优化;通过在流片后的实际样机上验证,编码速率为19.88 kb/s,解码速率为22.68 kb/s,达到了语音实时性要求。
引言随着微电子和计算机技术的高速发展,许多嵌入式应用系统应运而生。
其中,各种语音处理系统不断被开发出来,在各行业得到广泛应用,如语音报站器、自动解说装置、采访录音笔等,为人类的生产、生活提供了极大的便利。
本文基于东南大学国家专用集成电路系统工程技术研究中心自主研发的arm7tdmi内核的32位嵌入式soc——sep3203处理器,采用g.721标准adpcm算法,实现了语音信号的软件实时编解码,为语音处理应用提供了一种有效的嵌入式解决方案。
1、g.721标准概述1937年,a.h.reeves提出脉冲编码调制(pcm),开创了语音数字化通信的历程。
ccitt在20世纪80年代初,开始研究低于64 kb/s的非pcm编码算法,先后制定通过了g.721、g.728、g.729等编码标准。
其中,g.721协议作为adpcm的典型算法,不仅具有与pcm近乎相同的语音质量,而且有简单的算法结构和优良的抗误码性能,在卫星、海缆及便携式数字语音设备等方面都有广泛应用。
编码过程:①计算sl(k)与自适应预测器输出se(k)的差值e(k)=sl(k)-se(k);②通过自适应量化模块对e(k)进行量化,得到adpcm码字i(k);③通过自适应反量化模块对i(k)计算得到量化差分预测信号dq(k);④根据重建信号sr(k)=se(k)+dq(k)和dq(k)更新预测滤波器系数;⑤利用新的系数,计算得到se(k+1),重复上述5个步骤,压缩下一个语音采样数据。
解码过程:①通过自适应反量化和自适应预测得到dq(k)和se(k),得到语音重建信号sr(k);②对重建信号sr(k)进行pcm格式转换,得到pcm码字sp(k);③采用与编码器相同的方法更新预测滤波器系数;④为实现双向通信,同步调整sp(k);⑤利用新的滤波器系数,重复上述5个步骤,解码下一个i(k)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
b l o n s u c e tr a d d sg e h e e ev r o d t c t i e e c f s u d s u c r n mis n t h e i s u d o r e v co n e in d t re rc ie s t ee t i e me d f rn e o o n o re t s si o t r e f a o
c n e u e NEC oo c nr l hi D7 F1 03 nd h f l b i g c i 98 t d i a tpp r moo c l s — e tr, s d m t r o to c p 8 2 a t e ul- rd e h p L2 o rve se e tr a"a a no
目的地 坐标 数据 无线传 输给 声 源小车 , 其精 确移 动到 目的地 实验 结 果表 明 . 使 系统 运行稳 定 关 键词 : 音定 位 ; M7; 声 AR 电机 控 制 : 线传 输 无 中 图分 类 号 : TH8 5 6 文献 标 志 码 : B
De i n o un Gu da e y t m s d n sg f So d i nc S se Ba e o ARM 7
摘 要 :为设 计一 种 声 音导 引 系统 . ̄AR 作 为 系统 的控 制核 心 .采 用NE 2. M7 C电机 控 制 芯 片
D7 F 2)外加L 9 全桥 驱 动步进 电机 小车作 为移 动 声源裁体 .并 设计 三 个声音 接 收 器来检 测 8 1( 3 28
声源 的声音 到三 个接 收 器的传 输 时 间差 , 用G S 利 P 定位 算 法计 算 声 源坐标 , 然后将 声 源 坐标 和
H h n A G L i,O G Y e,H N h-a L u HU N i ig U S e g, N e S N u Z A G Z iin,IJn , A G Ha m n Y j —
( olg fElcrnc n ie r g D n g a iest fT c n lg , n g a 2 8 8 Chn ;,olg fC mp t C l e o e t is E gn e n , o g u n Unv ri o eh ooy Do g u n 5 3 0 , ia 2C l e o o u— e o i y e
r c ie s usn GPS o a ia in lo t m t c lults o r n ts f s u s u c e ev r , i g l c lz to ag r h i o a c ae e o diae o o nd o r e. t e d t o o n s ure c o . h n aa f s u d o c o r dnae a d e tn to c o d n ts i t s n d sia in o r i ae was r n mitd o o d o r e a wiee sy o a i mo e o h d sia in ta s t t s un s u c c r rl sl t m ke t e v t te e tn to p e iey.Ex e i n ho d t a h s se wo k d sa l . r cs l p rme t s we h tt e y tm r e tb y
Ke r s:o n o aiai n A y wo d s u d lc l t ; RM7 z o ;moo o t l iee s t n mis n tr c nr ;w r ls r s s i o a o
目前 国 内外 的测 距 、定 位 技术 在高 速 发展 . 在
测 距 、定 位 技 术 方 面 所 用 到 的 分 别 有 激 光 测 距 、 超 声 波 测 距 , P 定 位 技 术 、 — i 位 技 术 、超 宽 带 G S WiF 定 定 位 技 术 、 频 识 别 定 位 技 术 、 牙 定 位 技 术 、 声 射 蓝 超
文 章 编 号 : 0 19 4 (0 0 1 -0 6 0 1 0 — 9 42 1 ) 20 4 — 4
基 于 AlM7的声音导 引 系统 的设 计 l
胡 胜 , 杨 雷 , 宋 跃 张 志 坚 , , 李 君 z黄 海 明 ,
( 东 莞 理 S 学 院 电 子工 程 学 院 ,东 莞 5 80 2. 莞理 5 学 院 计 算机 学 院 ,东 莞 5 38 8) 1. - 23 8; 东 - 2 0
e , n g a n v ri fT c n lg D n g a 2 8 8, h n ) r Do g u n U ie s y o e h o o y, o g u n 5 3 0 C i a t
Ab ta t I r e o e in s r f o n g i a c s se , i p r a h e a d d s r c :n o d r t d sg a o t s u d u d n e y tm t s p o c r g r e ARM7 s h s se c n r l o h a a t e y tm o to
能 化 电子 产 品在各个 领域 的推广应 用 。
1 设 计 目标 与 方 案
1 1 设 计 目 标 .
波 定位 技术 、 红外 线 室 内定位 技 术 等 等 [ ]对 于 利 I. - 3 用 音频 信 号 , 尤其 是 利 用 人声 的测 距 、 位 技 术 的 定