2009年全国电子设计大赛B题—声音导引系统
2013年全国电子设计大赛赛题
A 单相AC-DC变换电路
B 四旋翼自主飞行器
C 简易旋转倒立摆及控制装置
D 射频宽带放大器
E 简易频率特性测试仪
F 红外光通信装置
G 手写绘图板
J 电磁控制运动装置
K 简易照明线路探测仪
L 直流稳压电源及漏电保护装置
2011年全国电子设计大赛赛题本科组开关电源模块并联供电系统
本科组基于自由摆的平板控制系统
本科组智能小车
本科组LC谐振放大器
本科组简易数字信号传输性能分析仪
高职高专组帆板控制系统
高职高专组简易自动电阻测试仪
高职高专组波形采集、存储与回放系统
本科组光伏并网发电模拟装置
本科组声音导引系统
本科组宽带直流放大器
本科组无线环境监测模拟装置
本科组电能收集充电器
本科组数字幅频均衡的功率放大器高职高专组低频功率放大器
高职高专组 LED点阵书写显示屏
高职高专组模拟路灯控制系统。
2009年全国职业院校技能大赛高职组电子产品设计及制作项目竞赛试题

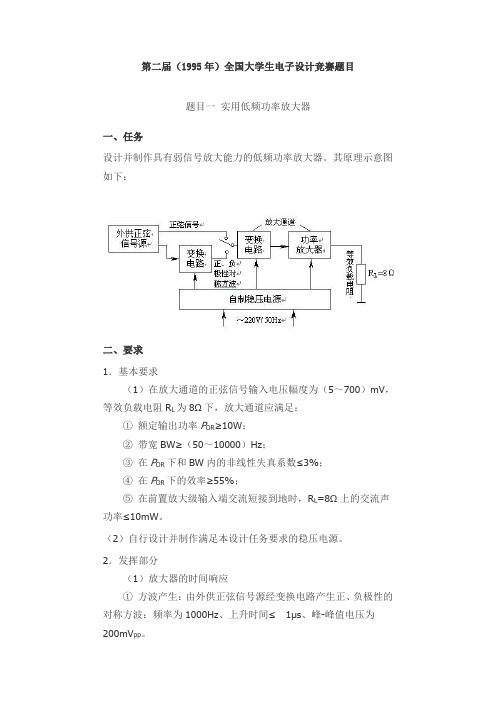
2009年全国职业院校技能大赛高职组电子产品设计及制作项目竞赛试题(样题)2009年06月10日星期三16:372009年全国职业院校技能大赛高职组“电子产品设计及制作”项目竞赛试题(样题)题目: 数控步进直流稳压电源的设计与制作一、任务按所附原理图(图6)完成部分电路设计,制作一台数控步进直流稳压电源。
1.分析电路工作原理,完成“电路设计区”的电路设计。
2.利用Protel99SE软件绘制全电路图,并按要求设计PCB。
3.利用组委会提供的机箱完成简单的结构设计,包括变压器、电路板、按键、LED的安装及机内走线的规划。
4.完成电路组装及调试。
5.完成整机的安装与调试,使其达到规定的技术指标。
6.编写设计文件、生产工艺文件、产品说明书。
二、功能要求与技术指标1.功能要求⑴通过“+”、“-”键步进调整输出电压,可调范围为0~+12V,步进幅度为0.5V。
⑵输出电压和电流值通过4位LED显示,显示精度分别为0.1V和0.01A。
通过“F1”键实现电压/电流显示切换,开机默认显示电压,按“F1”转换为显示电流,再按“F1”转换为显示电压。
4位LED末位显示单位,电流显示“ ”,电压显示“ ”。
⑶过流保护与报警功能。
2.技术指标⑴交流输入电压范围:220V±10%⑵输出电压范围:0~+12V⑶输出电流范围:0~1A⑷输出纹波电压:<10mV(输出电压为10V,输出电流为500mA时测得)⑸过流保护动作电流:1.1 A三、技术文件要求1.设计文件包括:原理说明(包括电路图、电路框图、电路参数)、程序流程图、程序清单、印刷电路板图等。
2.生产工艺文件(执行《中华人民共和国电子行业标准SJ/T10320-92》)包括:主要的生产工艺流程、元器件清单、连线图(表)、调试工作单卡等。
3.产品说明书包括:产品概述、技术参数、面板及操作说明、使用注意事项等。
四、赛题说明1.关于电路元件及部分电路的说明⑴除电路设计区外的元件在比赛开始时发放给参赛者。
2009年全国大学生电子设计竞赛试题

参赛注意事项(1)2009年9月2日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)参赛队必须在学校指定的竞赛场地内进行独立设计和制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
无线环境监测模拟装置(D题)【本科组】一、任务设计并制作一个无线环境监测模拟装置,实现对周边温度和光照信息的探测。
该装置由1个监测终端和不多于255个探测节点组成(实际制作2个)。
监测终端和探测节点均含一套无线收发电路,要求具有无线传输数据功能,收发共用一个天线。
二、要求1.基本要求(1)制作2个探测节点。
探测节点有编号预置功能,编码预置范围为00000001B~11111111B。
探测节点能够探测其环境温度和光照信息。
温度测量范围为0℃~100℃,绝对误差小于2℃;光照信息仅要求测量光的有无。
探测节点采用两节1.5V干电池串联,单电源供电。
(2)制作1个监测终端,用外接单电源供电。
探测节点分布示意图如图1所示。
监测终端可以分别与各探测节点直接通信,并能显示当前能够通信的探测节点编号及其探测到的环境温度和光照信息。
图1 探测节点分布示意图(3)无线环境监测模拟装置的探测时延不大于5s,监测终端天线与探测节点天线的距离D不小于10cm。
在0~10cm距离内,各探测节点与监测终端应能正常通信。
2.发挥部分(1)每个探测节点增加信息的转发功能,节点转发功能示意图如图2所示。
即探测节点B的探测信息,能自动通过探测节点A转发,以增加监测终端与节点B之间的探测距离D+D1。
全国大学生电子竞赛题目
设计并制作一台数字显示的简易频率计。
二、要求
1.基本要求
(1)频率测量
a.测量范围信号:方波、正弦波;幅度:0.5V~5V;频率:1Hz~1MHz
b.测量误差≤0.1%
(2)周期测量
a.测量范围信号:方波、正弦波;幅度:0.5V~5V;频率:1Hz~1MHz
b.测量误差≤0.1%
(3)脉冲宽度测量
b.提高输出电压
(4)用数字显示输出电压和输出电流
三、评分意见
项 目
得 分
基本要求
设计与总结报告:方案设计与论证,理论分析与计算,电路图,测试方法与数据,对测试结果的分析
50
实际制作完成情况
50
发挥部分
完成第(1)项
9
完成第(2)项
15
完成第(3)项
6
完成第(4)项
10
特色与创新
10
B题简易数字频率计
(2)温度控制的静态误差≤0.2℃。
(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。
三、评分意见
项 目
得分
基本要求
设计与总结报告:方案设计与论证,理论分析与计算,电路图,测试方法与数据,对测试结果的分析
50
实际制作完成情况
50
发挥部分
减小调节时间和超调量
20
温度控制的静态误差≤0.2℃
(1)扩展频率测量范围为0.1Hz~10MHz(信号幅度0.5V~5V),测量误差降低为0.01%(最大闸门时间≤10s)。
(2)测量并显示周期脉冲信号(幅度0.5V~5V、频率1Hz~1kHz)的占空比,占空比变化范围为10%~90%,测量误差≤1%。
(hxn2)声音导引系统

甘肃省大学生电子设计大赛设计报告题目:声音导引系统院校:甘肃省河西学院参赛学生姓名:吉彦平尹喜金梅艳指导教师:顾建雄南雅公黄小娜摘要:本文对声音引导系统的整体设计方案进行了全面的分析,主要分为四个部分:声源设计、声音发射、声音信号接受和指令信号的产生与发射,以及ASSP芯片(型号MMC-1)控制声源运动。
设计作品基本满足各项技术指标。
关键词:无线信号传输红外传感器ASSP芯片(MMC-1)1 系统方案1.1设计要求1.1.1 基本要求(1)制作可移动的声源。
可移动声源产生的信号为周期性音频脉冲信号,如图1所示,声音信号频率不限,脉冲周期不限。
(2)可移动声源发出声音后开始运动,到达Ox 线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于 5cm/s 。
(3)可移动声源停止后的位置与Ox 线之间的距离为定位误差,定位误差小于3cm 。
(4)可移动声源在运动过程中任意时刻超过Ox 线左侧的距离小于5cm 。
(5)可移动声源到达Ox 线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
1.1.2 发挥部分(1)将可移动声源转向180度(可手动调整发声器件方向),能够重复基本要求。
(2)平均速度大于10cm/s 。
(3)定位误差小于1cm 。
(4)可移动声源在运动过程中任意时刻超过Ox 线左侧距离小于2cm 。
(5)在完成基本要求部分移动到Ox 线上后,可移动声源在原地停止5s ~10s ,然后利用接收器A 和C ,使可移动声源运动到W 点,到达W 点以后,必须有明显的光和声指示并停止,此时声源距离W 的直线距离小于1cm 。
整个运动过程的平均速度大于10cm/s 。
图1 信号波形示意图可移动声源的起始位置到Ox 线的垂直距离 响应时间平均速度=1.2 系统方案比较1.2.1声源设计方案一:利用单片机产生音频脉冲信号,并经过功放,推动扬声器发声。
本次学生竞赛活动取名为“睿智杯”(或“励志杯”)
关于举办《ZSCS杯赛》实施办法本项赛事是由学院实验中心主办,中山市计算机学会协办,属于市级竞赛。
竞赛以09年全国大学生电子设计竞赛题目为基础,主要面向我院设有电子专业课程的各系学生。
利用原比赛基础,将现场比赛办法改成课外制作。
以充分发挥学生的智能和动手能力。
竞赛设计为两个阶段。
第一阶段为课外自由制作,完成时间为15天。
第二阶段为现场答辩和应对制作,根据比赛作品完成情况,设计不同的现场题目,以检验学生的基本功和临场应对能力。
本次竞赛本院学生均可报名参加。
以小组为单位,由学生自主报名,三人组成参赛小组。
自行邀请指导老师。
赛事分两步完成。
11月4日前报名。
11月18日至20日交作品,21、22组织评审(现场答辩和应对制作)工作。
11月底完成颁奖工作。
大赛的评审工作在实验大楼A301实验室完成。
现场制作比赛,在实验大楼A408实验室。
1、报名:参赛学生可于11月4日以前到教学楼3-216欧老师处报名,根据报名要求填写报名内容。
2、收集作品:11月18日到20日为作品收集时间,参赛选手将完成赛题基本要求的作品交到大赛指定地点(实验大楼A409丁老师处)。
根据作品的参赛情况,经过初评,通知获评审资格的选手参加作品演示和现场答辩(时间和地点和地点届时准确通知)。
3、作品评审:作品收集后,由大赛评委择时在实验中心301实验室对参赛选手演示的结果进行打分和对选手进行考评。
评分规则按各个题目规定的要求,各自评委打分,最后平均综合,确定进入复赛选手。
4、复赛:经评选进入复赛的选手到408实验室进行复赛。
复赛内容以基础电路制作为题。
要求各个小组独立制作,现场由监考人员监督。
各小组之间不得商量,交流。
现场制作的器材由实验中心准备。
5、本次大赛评审的内容参照全国竞赛的评比办法:1)、对作品的功能、技术指标的评比及性价比的评比。
2)、作品的制作工艺评比。
3)、对作品测试报告和论文的评比6、大赛机构:组委会:周艳明、杨华银、马云辉、顾晓勤、傅瑜评委:刘根据、石建国、丁其林、张正明、邓春健、刘宝军秘书处:丁其林、张志斌、欧建韶总顾问:杨华银7、奖项设置:一等奖:设3个名额二等奖:设5个名额三等奖:纪念奖若干名8、大赛题目:分以下六个题目,各参赛小组可选择一到两个题目进行参赛。
历年全国电子设计大赛控制类题

控制类题目分析1. 第三届(1997年)C题水温控制系统[3](1)设计任务设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。
水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。
(2)设计要求①基本要求a. 温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。
b. 环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。
c. 用十进制数码管显示水的实际温度。
②发挥部分a. 采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。
b. 温度控制的静态误差≤0.2℃。
c. 在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。
2. 自动往返电动小汽车[5](第五届,2001年)(1)设计任务设计并制作一个能自动往返于起跑线与终点线间的小汽车。
允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控)。
跑道宽度0.5m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。
在跑道的B、C、D、E、F、G各点处画有2cm宽的黑线,各段的长度如图1.3.42所示。
图1.3.42 跑道顶视图(2)设计要求①基本要求a. 车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回)。
往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
b. 到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差的测量值)。
c. D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于8秒,但不允许在限速区内停车。
②发挥部分a. 自动记录、显示一次往返时间(记录显示装置要求安装在车上)。
b. 自动记录、显示行驶距离(记录显示装置要求安装在车上)。
c. 其它特色与创新。
(3)说明a.不允许在跑道内外区域另外设置任何标志或检测装置。
基于声音导引的声源定位系统设计

以及 麦 克 风 阵 列 声 源定 位 。 主 流 的研 究 方 向是 通 过 各 种 技 术 确
定声源 的精确位置 , 文献【】 2 中提 出的基于无线传感 网络 的声 源
定 位 系 统 提 高 了声 源 定 位 技 术 的灵 活 性 。本 文 设计 的 系 统是 在 声 源 定 位 的基 础 上 , 制 声 源 的移 动 , 其 移 动 到 预 想 的 位 置 , 控 使 实现声源的再定位。系统 以 C 0 1 片机为核心 , 85 单 以麦 克 风 为 收音 设 备 , 计 一 个 以声 音 为 引 导 , 过 无 线 通 信 技 术 , 现 对 设 通 实 移 动 声 源 的定 位控 制 系 统 。
陈益 如 王 博 邬 杨 波
( 宁波大学信息科 学与工程技术 学院, 浙江 宁波 3 5 1 ) 12 1
摘 要
声 音 定 位 技 术在 当今 高度 智 能 化 的 社 会 中有 着 诸 多 方 面 的 应 用 , 涉及 军 事 、 洋 搜 索 、 海 多媒 体 通 信 、 能机 器 人 等 方 智
s n t l a i a o s ou d o oc t on s pr po ed.
Ke wors:oun l aiain,oc gudan e, r e s c y d s d oc l t v ie z o i c wi s om munca in,on r el i t c tol o
Abs r c ta t
Sou lcai t n as nd o l i h man za o y appl a i s n o i t c on i n wad ys i l it lg t ed o it I as s i m i a yoc an ea c a hghy n el eni s cey. h u ed n i z t l r , e s r h, i t mut lmedi c i a omm u c in i el niat s, o nt l i t rbot t Th r f e,ou d lcaiat h s s e f ap ia i an i a a an ed gen o . c. e eor s n o l i e z on a p cic i pl t c on d s n dv c t c olgy. i pa r e hn o Ths pe de i s ou d o l a i s sem ih s ba ed on v ce gui n n t s s t m ,s m ir ph e sgn a s n lcai t z on y t whc i s oi da ce I hi yse u e c o on t gai v ie,s wi ls co m u c t t a iv s un lc ia i Afer e t g. i s sem c p e s c tolt e o n oc u e r es e m nia i on o che e o d o al t z on.t t si Ths y t n an r cie onr h
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编号:01 2009全国大学生电子设计竞赛题目B:《声音导引系统》目录1方案设计与论证 (2)1.1主控系统选择 (3)1.2电机选择 (3)1.3电机控制系统选择 (3)1.4无线数据通信模块选择 (3)1.5声音信号处理方案选择 (3)2电路设计 (3)2.1系统组成 (4)2.2音频发射 (4)2.3音频处理 (4)2.4电机控制系统 (5)3软件设计 (5)4系统测试 (6)4.1测试仪器 (6)4.2测试方法 (6)4.3测试数据 (7)4.4误差分析 (7)5设计总结 (7)6参考文献 (7)7 附录 (8)附1:部分元器件清单 (8)附2:仪器设备清单 (8)附3:部分程序清单 (8)声音导引系统设计与总结报告摘要:本系统采用两片STC12C5A60S2增强型51单片机,双直流电机双轮驱动小车。
通过接收点收到声音信号时间不同,判断小车离各个接收站的距离远近,通过无线传输模块控制车载单片机,进而控制小车运动,到达目的地,发出声光信号。
本系统在设计中注意低功耗处理和力求高性价比等细节。
本设计主要特点:1. 高效的L293电机驱动电路,提高电源利用率。
2.双电源设计,控制电路电源与电机电源隔离,信号通过光耦传输。
3.采用测时间差的方式,通过3点声音信号实现精确定位。
关键词: 声音导引可移动声源声音接收器单片机智能车AbstractT his system use two STC12C5A60S2 enhanced 51-series microcomputer, double dc motor drive car outfit. Through different voice signal method-the peak-trough received from various terminal, the car of distance, through wireless transmission module control vehicle, and control chip car movement, destination, a sound signal. This system in the design of low power consumption and high performance to such details.1.方案设计与论证1.1主控系统选择方案一:采用高性能嵌入式系统,比如ARM。
如果采用此方案,可以很好的解决数据处理和控制功能,但是ARM价格昂贵且本科阶段很少接触,在短时间内完成困难比较大。
方案二:采用大规模可编程逻辑器件,如FPGA,CPLD但本题属于控制类,不适合采用此方案。
方案三:采用2片高性能单片机来实现,一片用来处理音频信号接收,同时控制车载单片机,担当主控单片机。
另一块作为从单片机,用来控制小车运动。
考虑到方案的可实行性和性价比,我们采用STC12C5A60S2增强型51单片机,此款单片机内部不分频,采用RISC精简指令集,可实现高速运算,存储空间大,价格低廉,性价比极高。
1.2电机选择本题是控制类题目,所以电机的选择尤为重要。
方案一:选择普通直流电机,通过减速齿轮增大扭力,提高带负责能力。
直流电机的优点是价格便宜,控制容易,但难以精确控制是其一大弱点。
方案二:选择步进电机。
步进电机的特点是可以精确控制电机选择步数和角度,缺点就是力矩比较小,容易失步,而且价格比较昂贵。
考虑到题目要求性价比高,所以我们选择普通直流电机,通过优良的控制算法,达到高精度定位。
1.3电机控制系统选择方案一:通过晶体三极管等分立元件搭H桥。
优点是价格便宜,结构简单,控制简单。
但由于晶体三极管的承载电流比较小,驱动能力受到限制,因为是分立元件,稳定性不敢保证,且体积比较大。
方案二:采用集成芯片,如L293,L298等。
其优点是集成度高,电路简单,控制方便可靠,体积小,效率高。
考虑到小车比较小,要安装的电子装置比较多,控制精度比较高,所以选用低电压驱动高效率的L293驱动芯片(L298需要的驱动电压高,效率低)。
1.4无线数据通信模块选择方案一:红外通信,红外通信器件易得,价格低廉,但必须直线收发是其致命弱点。
方案二:采用nFR24L01无线通信模块,此无线通信协议工作于2.4~2.5 GHz ISM 频段,数据传输率最快可达2 Mb/s。
我们选用nFR24L01无线通信模块,确保通信的流畅性和准确性。
1.5声音信号处理方案一:由于声源离各接收站距离不等,所以各接收站收到声音信号所需时间不等,进而可以判断出小车方位,引导小车前进。
方案二:由于声源离各接收站距离不等,所以各接收站收到声音信号的强度不等,通过AD转换器测出电压大小,进而可以判断出小车大概方位,引导小车前进。
由于接收站离主控单片机有1米距离,传输距离比较远,需要导线比较长,容易受分布电容等干扰,直接传输电压信号容易导致不精确,所以我们采用测时间差的方法。
小结:经过几番仔细的论证和比较,我们决定了本系统主要模块方案如下:音频处理方案:采用测时间差的方式。
主控制器:两片STC 12C5A60S2增强型51单片机。
小车行驶方案:双直流电机双轮驱动。
无线通信模块:nFR24L01通信模块。
电机控制系统:NEC_MMC电机控制芯片和L293集成芯片。
2.电路设计2.1系统组成原理本系统由声源发射器,接收站A,接收站B,接收站C,主控单片机,无线传输模块,从控单片机,NEC MMC-1电机控制芯片,电机驱动模块,声光电路等组成。
图2.4电机控制和驱动原理图3.软件设计设可移动声源为S点,如果AS距离大于BS距离,则车向9点钟方向前进,如果AS距离小于BS距离,则车向3点钟方向倒车,如果AS等于BS,则说明小车在AB的中垂线上。
如果AS距离大于CS距离,则车向6点方向前进,如果AS距离小于CS距离,则小车向12点钟方向倒车,如果AS等于CS,则小车到达W点。
图3.1 小车行驶示意图N图3.2系统整体流程图4.系统测试1.测试仪器 秒表,米尺等。
2.测试方法通过改变小车的起始位置,测量小车走完全程所需时间,计算出平均速度。
3.测试数据可移动声源在Ox 线上重新启动位置到移动停止点的直线距离 再次运动时间 平均速度2=可移动声源的起始位置到Ox 线的垂直距离响应时间 平均速度1=经测试,本小车基本达到发挥部分要求。
4.误差分析小车有时并不能完全直线行走,略微有点跑偏,经分析原因有两个:1)小车是新买的,齿轮磨合情况不同,导致两个轮子速度不一致。
2)因为小车上装置比较多,导致重心偏移,轮子受到的阻力不同,导致小车跑偏。
5.设计总结本作品以两片STC 12C5A60S2增强型51单片机为核心部件,通过接收站收到音频信号的响应时间不同,配合一套完整的程序,实现了小车的精确定位。
在设计中,我们尽量采用低功耗器件,力求硬件电路的经济性和精简性,充分发挥软件控制灵活方便的特点,来满足设计要求。
6.参考文献[1]全国大学生电子设计竞赛组委会. 全国大学生电子设计竞赛获奖作品选编[M] .北京理工大学出版社,2007[2]黄开胜. 学做智能车——挑战“飞思卡尔”杯[M] .北京航天航空大学出版社,2007[3]万福君,潘松峰.单片微机原理系统设计及应用[M] .合肥:中国科学技术大学出版社,2001[4] (日)森政弘,(日)铃木泰博.机器人竞赛指南 [M] .北京:科学出版社,2002[5] 王灏,毛宗源.机器人的智能控制方法[M] .北京:国际工业出版社,2002[6] 张培仁,张志坚.基于16/32位DSP机器人控制系统设计与实现[M] .北京:清华大学出版社7. 附录附1:部分元器件清单芯片:STC 12C5A60S2*2 NEC_MMC*1 L293*1 74LHC04*1,LM386*3 LM567*3 TP521*1 nFR24L01无线通信模块*2MIC*3 喇叭*1 电阻电容若干导线若干单片机最小系统附2:仪器设备清单秒表米尺万用表函数信号发生器示波器附3.:程序清单/********************************************************************************* FileName:carmotorSPI.C (be included in project fts-89c52.Uv2)** Brief Introduction:2009年全国大学生电子设计竞赛本科组题目B 中需要用到的对电机控制芯片(C公司的MMC-1)的单片机控制程序。
单片机采用STC 12C5A60S2芯片,接PWM或步进电机波形产生芯片MMC-1,通过L293驱动芯片驱动直流电机。
** Author:吴飞** Date:2009.9.2~2009.5** Edition:** note:STC12C5A60S2/AD/PWM系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。
内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S),针对电机控制,强干扰场合。
所以本系统中的延时程序delay_10us(uchar n); delay_ms(uint n);延时时间只有设定值的1/10左右********************************************************************************///#include <REG52.H> /* special function register declarations// for the intended 8051 derivative */#include<STC12C5A60S2.h> /* special function register declarations// for the intended STC12C5A60S2 derivative */#include<intrins.h>#define uchar unsigned char#define uint unsigned int//==========================================//定义空指令#define _Nop() _nop_()//==========================================//端口定义//uchar temp1,temp2;sbit SPISO=P1^3;sbit MOSI=P1^4;sbit SPICLK=P1^5;//变量定义uchar motor;//常量定义#define motorL 0x50 //小车左轮直流电机受MMC电机通道0(CH1DCPWM及CH1DCDIR)//0x50为该通道命令寄存器地址#define motorR 0x54 //小车右轮直流电机受MMC电机通道1(CH2DCPWM及CH2DCDIR)//0x50为该通道命令寄存器地址#define dirfront 1#define dirback 0//===========================================//函数声明void WT_BYT_SPI(unsigned char cByte);void drivemotor(uchar motor,uchar speed,bit dir);void stopmotor(uchar motor);void delay_10us(uchar n);void delay_ms(uint n);//void SPI_Write(char dat);//unsigned char RD_BYT_SPI(void);//void WT_WORD_SPI(unsigned int cWord);void main(){EA=0; //关中断delay_ms(10); //等待系统及MMC-1初始化while(1){drivemotor(motorL,0x1F,dirfront); //for testingdelay_ms(30000);stopmotor(motorL); //for testingdelay_ms(30000);drivemotor(motorL,0x1F,dirback); //for testingdelay_ms(30000);stopmotor(motorL); //for testingdelay_ms(30000);}}/********************************************************************* *Function Name: drivemotor*Function description:驱动电机运转.可控制且必须依次正确填写以下输入参数。