超大型船舶旋回性能的探讨
船舶的旋回性能

船舶旋回性能受到船舶尺寸、排水量 、船速、水动力性能等多种因素的影 响,不同船舶的旋回性能存在差异。
船舶旋回性能的重要性
01
02
03
航行安全
良好的船舶旋回性能有助 于船舶在复杂水域中安全 航行,避免碰撞和搁浅事 故。
操纵性
旋回性能是评价船舶操纵 性的重要指标,对船舶的 进出港、靠离泊、掉头等 操作具有重要意义。
05
船舶旋回性能的优化建议
优化船舶设计
优化船舶线型设计
01
通过改进船体线型,降低船舶阻力,提高船舶旋回时的稳定性。
增加船舶推进器功率
02
提高船舶推进器功率,增强船舶旋回时的推进力,提高旋回性
能。
优化船舶舵面积和舵机设计
03
增加舵面积和改进舵机设计,提高船舶旋回时的操控性能。
提高船员操作水平
加强船员培训
02
船舶旋回性能的影响因素
船舶尺寸与形状
船长
船型
船长越长,旋回半径越大,旋回所需 时间和空间也越大。
不同的船型具有不同的旋回性能,例 如,球鼻艏设计可以改善船舶的旋回 性能。
船宽
船宽影响船舶的稳定性,船宽越大, 船舶的稳定性越好,但旋回性能可能 会降低。
船舶速度与推进器转速
速度
船舶速度越快,旋回所需的时间和空间越小,但旋回性能也 可能会降低。
推进器转速
推进器转速影响船舶的速度和动力输出,进而影响旋回性能 。
水流与风的影响
水流
顺流时船舶的旋回性能较好,逆流时则较差。
风向与风速
风向与船舶航向一致时有利于船舶的旋回,反之则不利。风速越大,对船舶旋 回性能的影响也越大。
船员操作水平与经验
操舵技巧
船舶的旋回性能船舶操纵

3.第三阶段——定常旋回阶段
当漂角增加到一定值时,作用于 船体所受合力矩为零,进入定常旋回运 动。空船约在转首60°左右,满载约在 100 ° ~ 120 °左右进入定常旋回阶段。
• 特征:
• 船舶以固定漂角作匀速圆周运动
• 船舶处于相对稳定的外倾
二、旋回圈的大小及其要素
概念: 定速直航(一般为全速)的船舶操一定舵 角(一般为满舵)后,其重心所描绘的轨迹叫做 旋回圈(turning circle)。
船舶的追随性指数(turning lag index),单位为
s;K称之为船舶的旋回性指数(turning ability
index),单位为1/s。
二、船舶操纵性指数及其意义
1.K表示船舶旋回性的优劣
又称旋回性指数。K值大,则操舵后的转向角加 速度初始值、定常转向角速度值均较高,易于有较大 的转向角。
三、影响旋回圈大小的因素
1.方形系数Cb(block coefficient)
方形系数较低的瘦形高速船(Cb≈0.6)较方形系数较高的 肥形船(Cb ≈0.8)的旋回性能差得多,即船舶的方形系数越大, 船舶的旋回性越好,旋回圈越小。
2.船体水线下侧面积形状及分布
就整体而言,船首部分分布面积较大如有球鼻首者 或船尾比较瘦削的船舶,旋回中的阻尼力短小,旋回性 较好,旋回圈较小,但航向稳定性较差;而船尾部分分 布面积较大者如船尾有钝材或船首比较削进 (cut up) 的船舶,旋回中的阻尼力矩比较大,旋回性较差,旋回 圈较大,但航向稳定性较好
在3°~15°之间。
2) 转心(pivoting point)及其位置
旋回中的船舶可视为一方面船舶以一定的速度前进, 同时绕通过某一点的竖轴而旋转的运动的叠加,这一点就是 转心,通常以P代表之。船舶操舵旋回时,在旋回的初始阶 段,转心约在重心稍前处,以后随船舶旋回不断加快,转心 随着旋回中的漂角的增大而逐渐向船首方向移动;当船舶进 入定常旋回阶段即船舶旋回中的漂角保持不变时,转心P逐 渐稳定于某一点,对于不同船舶,该点的位置大约在离船首 柱后1/3~1/5船长处;船处于后退中,转心位置则在船尾 附近。
船舶操纵旋回性

又称心矩,指操舵开始重心至旋回曲率中心纵距. 又称心矩,指操舵开始重心至旋回曲率中心纵距.
船舶旋回性
二,旋回圈及其要素 6,反移量(kick) ,反移量( ) 即偏距, 即偏距 , 当航向转过一个罗经点时达最大 . 约
为船长的1%左右 而船尾可达船长的1/10~1/5. 左右, 为船长的 左右,而船尾可达船长的 . 7,漂角β(drift angle) ,漂角 ( )
船舶旋回性
一,船舶旋回运动的过程
1.第一阶段 .第一阶段——转舵阶段 转舵阶段 出现降速和漂角但量都很小;旋回角速度不大, 出现降速和漂角但量都很小;旋回角速度不大,但旋 回角加速度最大.重心向操舵相反方向少量横移 少量横移, 回角加速度最大.重心向操舵相反方向少量横移,同时因 舵力位置比重心位置低而出现少量内倾 少量内倾. 舵力位置比重心位置低而出现少量内倾. 2.第二阶段 .第二阶段——过渡阶段 过渡阶段 船舶的旋回角速度,横移速度和漂角均逐步增大. 船舶的旋回角速度,横移速度和漂角均逐步增大.降 速明显(斜航阻力增加) 由反向横移变成向操舵一侧正 速明显(斜航阻力增加);由反向横移变成向操舵一侧正 向横移;船舶由内倾变为外倾逐渐增大;船舶加速旋回 内倾变为外倾逐渐增大 加速旋回. 向横移;船舶由内倾变为外倾逐渐增大;船舶加速旋回. 3.第三阶段——定常旋回阶段 .第三阶段 定常旋回阶段 当漂角增加到一定值时,作用于船体所受合力矩为零, 当漂角增加到一定值时,作用于船体所受合力矩为零, 进入定常旋回运动.空船约在转首60°左右, 进入定常旋回运动.空船约在转首 °左右,满载约在 100 ° ~ 120 °左右进入定常旋回阶段. 左右进入定常旋回阶段.
船舶旋回性
二,旋回圈及其要素
Tr G DT G G
谈超大型集装箱船舶操纵中的几个问题
操纵 性能 上具 有 它 固有 的特 性 ,如受 风 面积 大 、质 量
大 、 性 大 、 动性 能 差 …… 等等 , 起 船舶 的操 纵 性 惯 制 引 能有 所下 降 , 表 现也不 同于一般 的船 舶 。 了提 高操 其 为 船技 能 ,开好 船 、 好 船 , 管 有必 要 对超 大 型集 装 箱船 的
本 无舵效 :
・追随 性差 ,在 改 向或过 弯 曲航 道 时需予 以充分
的估 计 , 宜小舵 角早 施舵 ;
舵效 , 以达 到 引航员 所 需 的航 速 、 向角 。“ 航 晋河 型 ” 船
极慢 速 为 75 n .k .只要 在上 下引 航员 时保 持极 慢速 , 船 身容 易控 制 。 相对 来说 。 少数 民族河 型 ” 比“ 船好 操纵 。
谈 超 大 型 集 装 箱 船 舶 操 纵 中 的 几 个 问 题
上 海远 洋运 输 有 限公 司 李俊 明
中远 集 团 在 今 后 的几 年 中 。还 将 有 多艘 超 大 型 从 R M/8降 到 R M/6 要 长达 2 P 8 P 7。 5—3 i 能 完成 0m n才
集装 箱船 舶型船 舶 操 纵 的几 点 体 会 , 同行探 讨 , 当之 与 不
处 望指正 。
港速 时 , 必须 以满 足上述 参 数为前 提 。
对于 加速 . 哈尼 河型 ” 与 “ 河 型 ”船从 F L - “ 晋 U L S E D加 速 到 S A S E D,都须 经过 2 PE E —P E 5—3 n这 0 mi 加 转过 程 。
一
1 超大 型集 装箱 船舶 操纵 特性 通常 船长 超过 2 0m, 5 排水 量 在 8 载 重 吨及 以上 万 的称 为超 大 型 船舶 ; 也有 认 为 , 箱 量 达 27 0 E 以 载 0 T U 上 的全 集装 箱船 称 为超 大 型船 舶 。 由于超 大型 船舶 在
船舶的旋回性能-船舶操纵

2、描述船舶旋回运动状态的运动要素
1) 漂角(drift angle) 漂角(
船舶首尾线上某一点的 线速度与船舶首尾面的交角叫 做漂角, 如左图所示 。 做漂角 , 如左图所示。 船舶在 首尾线上不同点的漂角是不同 的 , 在船尾处, 由于其横移速 在船尾处 , 度最大, 因此漂角也最大 。 度最大 , 因此漂角也最大。 但 通常所说的漂角是指船舶重心 处的线速度Vt 与船舶首尾面的 处的线速度 Vt与船舶首尾面的 交角,也就是船首向与重心G 交角,也就是船首向与重心G点 处旋回圈切线方向的夹角, 处旋回圈切线方向的夹角,用B 表示之。 表示之 。 一般船舶的漂角大约 在3°~15°之间。 15°
第一节 船舶的旋回性
概述:旋回性是指定速直航的船舶操 某一大的舵角后进入定常旋回的运动性 能。
旋回性是船舶操纵性当中极 其重要的一种性能! 其重要的一种性能!
一、船舶旋回的运动过程
1、第一阶段(转舵阶段) 第一阶段(转舵阶段)
船舶向一舷操舵后, 船舶向一舷操舵后, 保持或近乎保持其直进速 度,同时开始进入基本沿 原航向前进而船尾外移同 时少量的向操舵一舷横倾 的初始旋回阶段 —反移内倾。
2) 转心(pivoting point)及其位置 转心( point)及其位置
旋回中的船舶可视为一方面船舶以一定的速度前进, 同时绕通过某一点的竖轴而旋转的运动的叠加,这一点就是 转心,通常以P 转心,通常以P代表之。船舶操舵旋回时,在旋回的初始阶 段,转心约在重心稍前处,以后随船舶旋回不断加快,转心 随着旋回中的漂角的增大而逐渐向船首方向移动;当船舶进 入定常旋回阶段即船舶旋回中的漂角保持不变时,转心P 入定常旋回阶段即船舶旋回中的漂角保持不变时,转心P逐 渐稳定于某一点,对于不同船舶,该点的位置大约在离船首 柱后1 柱后1/3~1/5船长处;船处于后退中,转心位置则在船尾 附近。 对于不同船舶而言,旋回性能越好、旋回中漂角B 对于不同船舶而言,旋回性能越好、旋回中漂角B越大 的船舶,其旋回时的转心越靠近船首。
超大型油轮的Williamson旋回仿真研究

类号IUDCll超大型油指导教师学位授予单位申请学位级别论文完成日期^r.一咯II|11111IrlllllIIIIIIY1895720TheResearchandSimulationofWilliamsonTurnforVLCCAthesisSubmittedtoDalianMaritimeUniversityInpartialfulfillmentoftherequirementsforthedegreeofMasterofEngineeringbyZhangShuhui(TrafficInformationEngineeringandContr01)ThesisSupervisor:ProfessorZhangXiankuMay2011●■■■’’’一——大连海事大学学位论文原创性声明和使用授权说明原创性声明本人郑重声明:本论文是在导师的指导下。
独立进行研究工作所取得的成果,撰写成博/q●,市硕士学位论文==超太型油轮的幽!li婴鲤旌回笾墓匠荭::.。
除论文中已经注明引用的内容外,对论文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本论文中不包含任何未加明确注明的其他个人或集体已经公开发表或未公开发表的成果。
本声明的法律责任由本人承担。
学位论文作者签名:学位论文版权使用授权书本学位论文作者及指导教师完全了解大连海事大学有关保留、使用研究生学位论文的规定,即:大连海事大学有权保留并向国家有关部门或机构送交学位论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大连海事大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,也可采用影印、缩印或扫描等复制手段保存和汇编学位论文。
同意将本学位论文收录到《中国优秀博硕士学位论文全文数据库》(中国学术期刊(光盘版)电子杂志社)、《中国学位论文全文数据库》(中国科学技术信息研究所)等数据库中,并以电子出版物形式出版发行和提供信息服务。
保密的论文在解密后遵守此规定。
1-2 船舶旋回性能

DT Tr Lk V
Ad
V D0 Re
一、旋回圈的几何要素的大小
横距Tr: 是开始操舵到航向转 过任一角度时,重心所 移动的横向距离。旋回 资料中提供的横距,通 常特指航向转过 90°时 的横距,其值约为旋回 初径的O.55倍
DT Tr Lk V
Ad
V D0 Re
船舶操纵
MAERSK EINDHOVEN 366X48X13
武汉船舶职业技术学院动力工程学院
第二节 船舶旋回性能
船舶的旋回性能的概念:定速直航的船舶,操一大 舵角,进入定常旋回。 船舶的旋回圈的概念:定速直航的船舶,操一定舵 角,其重心所描绘的轨迹。 概念的内涵: 定速直航;——车钟令 操一定舵角;——舵令 定常旋回。——线速度,角速度 非定常旋回。——从操好舵开始,重心所描绘 的整个轨迹。 操舵的程序复习?
DT Tr Lk V
Ad
V D0 Re
武汉船舶职业技术学院动力工程学院
一、旋回圈的运动要素
内容:漂角、转心及其位臵、旋回中的降速及横倾。 漂角β: 定义:船舶首尾线上任意一点的线速度与船舶首尾面 的交角;一般指:船舶重心处的线速度与船舶首尾 面的交角,其值约为3°~15°。 意义:漂角越大,e
武汉船舶职业技术学院动力工程学院
一、旋回圈的几何要素的大小
旋回直径D: 是船舶作定常旋回时 ,重心轨迹圆的直径, 其值约为旋回初径的 0.9~1.2倍
Ad DT Tr Lk V
V D0 Re
武汉船舶职业技术学院动力工程学院
一、旋回圈的几何要素的大小
滞距Re: 又称心距。正常旋回 时,船舶旋回直径的中 心 O 点较操舵时船舶重 心位臵更偏于前方。滞 距是该中心 O 的纵距。 一般为 1~ 2倍船长。是 衡量舵效的指标之一。
1.2船舶的旋回性能

X
Mf
VW
f
Mβ
Rf
β φ FW FWY
a
Ra
G
PN
(3)第三阶段: (定常旋回阶段 ) 当船首转向角φ转过一定角度,船舶旋回角速度趋于稳定时进 入定常旋回。 该阶段的主要特征:船速降到最低,并稳定。旋回角速度为常 数,旋回角加速度为零。船舶保持外倾,转心位置也稳定。
二、旋回圈及其要素
FW
VS
Mδ
PN '
G
PN "
PNX
PN
(2)第二阶段(过渡阶段)
①由于操舵后,船向反侧横移,船舶改变 了运动方向,形成了漂角β,水动力FW方向 转为船首外舷,其作用点在重心G之前。 对船体产生Mβ,Mβ与Mδ相同,形成加速回 转。 ② 由于旋回角速度的增加,产生不断增大 的水阻力的阻尼力矩Ma和Mf,使旋回角速 度的下降,限制其增加。 ③特征:A.船速明显下降,原因为船舶 斜航时水动力FW的纵向分力FWX作用; B、向操舵侧正向横移; C、向操舵相反一侧横倾(外倾); D、角加速度下降,角速度快速增大。
1.定义:定速直航中(一般为全速)的船舶操一舵角, (一般为满舵),并保持该舵角,船舶作旋回运动,其 重心所描绘的轨迹叫旋回圈。43源自25 761
2、旋回圈的要素
(1)反移量LK(偏距)
①定义:在旋回的初始阶段,船舶重心从原航向向操舵相反 一侧横移的距离,称为反移量kick。 ②大小:在满舵旋回时,当船首回旋达到一个罗经点11。 25度 (反移量 → 最大≈1%L)(G点的最大值) 尾偏出>首偏出,船尾的反移量远比重心G处的反移量大, 最大值约为(1/10~1/5)L (VS快、δ大,LK大) LK与VS、δ、操舵速度、载重状况、船型等有关。 船尾反移量:船尾向操舵相反一侧偏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第26卷 第3期大连海事大学学报V o l.26,N o.3 2000年8月Journa l of Da l i an M ar iti m e Un iversity A ug.,2000
文章编号:100627736(2000)0320048203
超大型船舶旋回性能的探讨Ξ
夏国忠,史国友
(大连海事大学航海学院,辽宁大连 116026)
摘要:在操纵模拟器上进行大型船舶模拟试验的基础上,结合本科教学实践和多年的航海经历,分析得出了影响超大型船舶旋回性能的主要因素除船型、船速、吃水差、舵面积外,还有舵角和装载状态.
关键词:超大型船舶;旋回性能;模拟试验
中图分类号:U664182 文献标识码:A
大型船舶由于载重量大,吃水深,尺度长,冲程大,惯性大,受海域限制等特点,操纵比较困难.其中旋回性能受多种因素的影响,如船型(方型系数C b),船速,吃水差,舵面积,舵角,以及装载状态等.本文将分析其主要的影响因素及影响程度,并与中小船舶的旋回性能作一比较.为此,选择三种类型超大型船,在我校研制的操纵模拟器上进行了旋回性能操纵实验.
超大型船(VL CC、U L CC)与一般的货船相比,在船型上显然不同,如表1,2所示.即大型船的长宽比小,方型系数大,在船体设计上,增加船长不如加宽加深较易大型化,这类肥满型船,今后有增加的趋势.
表1 各类船型主要尺寸
T ype DW 万t L p p B D d L B B d C b A L d
TAN KER1024640.221.815.076.122.670.7981 67.5 1528146.225.016.66.082.780.8141 64.6
2032649.823.217.696.552.830.8281 63.3
3033053.332.024.786.192.150.8502 103.96
表2 三种实验船舶的主要尺寸
T ype DW L p p B D L B B d C b A R L.d
525091331.6726739.8146.72.840.6141 73.715山口11394726043146.043.070.7281 69.18 SAN KO3000003185620.65.672.710.82721 114.4
Ξ收稿日期:20002032311
作者简介:夏国忠(1935~),男,浙江温州人,教授,主要从事船舶操纵与避碰的研究1
1 超大型船旋回性能的测试
超大型船的旋回性能一般较好,即D r L p p ≈3(旋回初径 垂线间长),这仅是与船长的
图1 集装箱船5250的右旋回圈和左旋回圈
比值上较小而言,实际上旋回初径的绝对值是很大的,1~2万t 船则为4~6倍.
测试条件:北风5级,水流1kn,水深40~43m ,龙骨下水深23~28m.模拟试验分三组.
(1)5250(第五代集装箱船)船速23kn,舵角35°,左右旋回轨迹如图1所示.右旋回的A d =1140m ,D r =1253m ,左旋回的A d =1212m ,D r =图2 散货船山口的右旋回圈和左旋回圈
1526m.
(2)山口(散货船)
船速12kn,舵角35°,左右旋回轨迹如图2所示.右旋回的A d =968m ,D r =988m ,左旋回的A d =869m ,D r =891m.
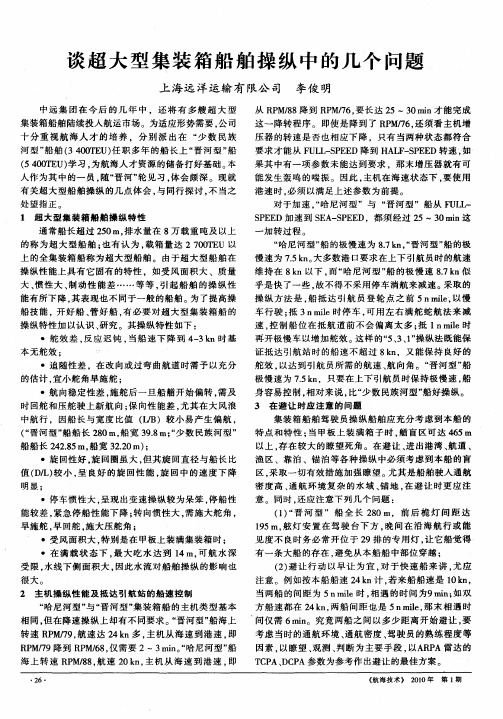
(3)SAN KO (油船)
船速15kn,舵角35°,
左右旋回图3 油船S AN KO 的右旋回圈和左旋回圈
轨迹如图3所示.右旋回的A d =1032m ,D r =1150m ,左旋回的A d
=1180m ,D r =1140m.
2 超大型船影响旋回初
径的因素
211 船型
超大型船的方型系数C b 的值
一般在0.8左右,即肥大型船对旋回初径影响较大.C b 越大,则旋回初径与两柱间长之比越小(D r L p p ).与普通船相比,方形系数较小的高速船较方形系数较大的肥胖型船,在使用舵角相同时,前者的旋回初径近似于后者的2倍左右[1].不同舵角,巨大型船的旋回初径与常规船舶的不同[1],舵角30°旋回,超大型船D L p p 为2.8,高速货物船为4.6,明显表示巨大型船旋回性能良好.212 船速
船速对旋回初径的影响不明显,而对旋回所需时间具有明显的影响.这里引进傅汝德数
F n ,它是一般船速大小比较的标准值.在常规船速的范围内,傅汝数F n 大多在0.3以下.当
船速低至某一数值,即F n <0.18,或船速增至某一数值,F n >0.3时,旋回初径将有逐渐增大的趋势.
9
4第3期夏国忠,等:超大型船舶旋回性能的探讨
05大连海事大学学报第26卷
超大型船,在其定常前进中的船速范围内,其傅汝德数均在0.2以下.当C b=0.8,F n< 0.2且舵角分别为20°、30°、40°时,其旋回初径是垂线间长的2~3倍,且变化不大[1].可见船速对旋回初径的影响几乎没有.
2.3 吃水差的影响
常规船舶吃水差对旋回初径带来明显的影响.特别是尾倾的船舶,尾倾增大,旋回初径也增加,若尾倾增大量为船长的1◊,其旋回初径将可能增加10◊左右[2].与常规船舶一样,对于超大型船(如C b=0.8),如果吃水差稍有变化,则旋回初径将会有明显的变化,特别是船首吃水差的变化影响更甚,即首倾船提高船舶旋回性[1].
2.4 舵面积的影响
增加舵面积将会使转船力矩增加,有利于船舶旋回性,减少旋回初径,但同时旋回阻矩会加大,限制了旋回性指数K值,对于一定类型的船,在设计时,必须确定一个最佳值.对中小型船,舵面积比的合理最佳值为:单桨货船为1 40~1 50;超大型油船为1 65~1 75;高速货船为1 35~1 40;拖船为1 20~1 25;渔船为1 30~1 401超大型船舵面积比的最佳值是:5万t级为1 77.5;10万t级为1 67.5;15万t级为1 64.6;20万t级为1 63.3;30万t级(双舵)为1 103.96.舵面积增加,一般旋回性变好,但舵面积增大至某一数值时,旋回性反而变差[1],所以舵面积不是越大越好.
3 结束语
在大型船舶操纵模拟器上进行模拟试验的基础上,结合本科教学实践和多年的航海经历,分析得出了影响超大型船舶旋回性能的主要因素,这些因素除船型、船速、吃水差、舵面积外还有舵角和装载状态.实验得出:舵角的影响和中小型船舶类同,增大舵角将会提高旋回性能;而装载状态的影响,不论满载、轻载状态,其旋回性无很大差异.超大型船以方形系数C b为影响最大,即船型对旋回性能影响最大.超大型船的尺度以L B=6~6.8,B d= 2.5~3.0居多,一般以L B小、B d大者旋回性为好.
参 考 文 献:
[1] 巫忠远.大型船舶操船须知[M].台北:航运与贸易杂志社,1981115220.
[2] 古文贤.船舶操纵[M].大连:大连海运学院出版社,1993.27228.
Turn i ng ability of very large cargo carr ier
X I A Guo2zhong,SH I Guo2you
(N av ig a tion Colleg e,D alian M ariti m e U n iv.,D alian116026,Ch ina)
Abstract:T he analysis of the resu lt from si m u lating test w h ich is m ade on the large sh i p handling si m u lato r show s the m ain facto rs that effect the tu rn ing ab lility of VL CC. T hese facto rs are rudder angle and loading state apart from b lock of coefficien t,sp eed, tri m,and rudder area.
Key words:very large crude carrier;tu rn ing ab ility;si m u lating test。