1-1 直角坐标系中的运动
初二数学直角坐标系动点问题
初二数学直角坐标系动点问题
问题描述
在数学学习中,直角坐标系是一个非常重要的概念。
通过直角坐标系,我们可
以很好地描述点的位置和运动。
在初二数学中,掌握直角坐标系动点问题是必不可少的一环。
本文将通过几个具体例子来介绍初二数学直角坐标系动点问题。
例题1
问题:在直角坐标系中,点A(3,4)围绕原点顺时针旋转90度,求旋转后的坐标。
解析:顺时针旋转90度相当于将点(x,y)变为(-y,x)。
因此,点A(3,4)围绕原点
顺时针旋转90度后的坐标为(-4,3)。
例题2
问题:在直角坐标系中,点B(1,2)绕原点逆时针旋转60度,求旋转后的坐标。
解析:逆时针旋转60度相当于将点(x,y)变为$(\\frac{x}{2}-
\\frac{\\sqrt{3}}{2}y, \\frac{\\sqrt{3}}{2}x+\\frac{y}{2})$。
因此,点B(1,2)绕原
点逆时针旋转60度后的坐标为$(\\frac{1}{2}-\\sqrt{3},\\sqrt{3}+1)$。
例题3
问题:直线y=2x与y=2-x相交于点C,请问点C的坐标是多少?
解析:点C是直线y=2x与y=2-x的交点,即满足方程2x=2−x,解得x=1,代入任意一个方程可得y=2。
所以点C的坐标为(1, 2)。
总结
通过以上例题的解析,我们了解了初二数学中直角坐标系动点问题的一些基本
概念和解题方法。
在学习数学时,通过练习多个实例可以帮助我们更好地掌握知识,提高解题能力。
希望本文对初二数学直角坐标系动点问题的学习有所帮助。
初中数学:直角坐标系中矩形的变换问题
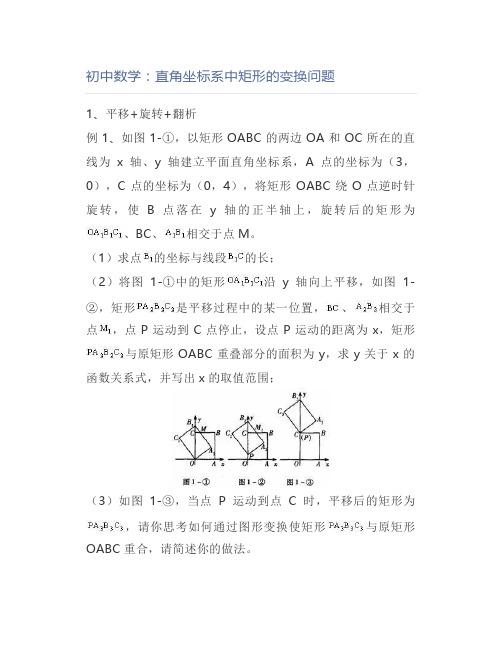
初中数学:直角坐标系中矩形的变换问题1、平移+旋转+翻析例1、如图1-①,以矩形OABC的两边OA和OC所在的直线为x轴、y轴建立平面直角坐标系,A点的坐标为(3,0),C点的坐标为(0,4),将矩形OABC绕O点逆时针旋转,使B点落在y轴的正半轴上,旋转后的矩形为、BC、相交于点M。
(1)求点的坐标与线段的长;(2)将图1-①中的矩形沿y轴向上平移,如图1-②,矩形是平移过程中的某一位置,、相交于点,点P运动到C点停止,设点P运动的距离为x,矩形与原矩形OABC重叠部分的面积为y,求y关于x的函数关系式,并写出x的取值范围;(3)如图1-③,当点P运动到点C时,平移后的矩形为,请你思考如何通过图形变换使矩形与原矩形OABC重合,请简述你的做法。
分析:第(1)问由勾股定理得的长,从而求出点的坐标,已知线段OC的长,继而求出线段的长。
第(2)问在矩形的整个平移过程中,矩形与原矩形OABC重叠图形由四边形(当点从开始位置平移到矩形OABC的边BC上时)变为三角形(当点从矩形OABC的边BC上到运动停止时),求出对应图形在对应条件下自变量x的取值范围及重叠部分的面积。
第(3)问具有开放性,可直接通过图形沿某一条直线翻折得到,或先旋转再平移得到,或先旋转再翻折得到,或先平移再旋转得到。
解:(1)如图1-①,因为,所以点的坐标为(0,5)。
(2)在矩形沿y轴向上平移到P点与C点重合的过程中,点运动到矩形OABC的边BC上时,求得P点移动的距离。
当自变量x的取值范围为时,如图1-②,由△∽△,得,此时,,即,当自变量x的取值范围为时,求得。
(3)①把矩形沿∠的角平分线所在直线对折。
或②把矩形绕C点顺时针旋转,使点与点B重合,再沿y轴向下平移4个单位长度。
或③把矩形绕C点顺时针旋转,使点与点B重合,再沿BC所在的直线对折。
或④把矩形沿y轴向下平移4个单位长度,再绕O点顺时针旋转,使点与点A重合。
2、旋转例2、如图2,在平面直角坐标系xOy中,把矩形COAB绕点C顺时针旋转角,得到矩形CFED。
七年级平面直角坐标系动点规律问题(经典难题)
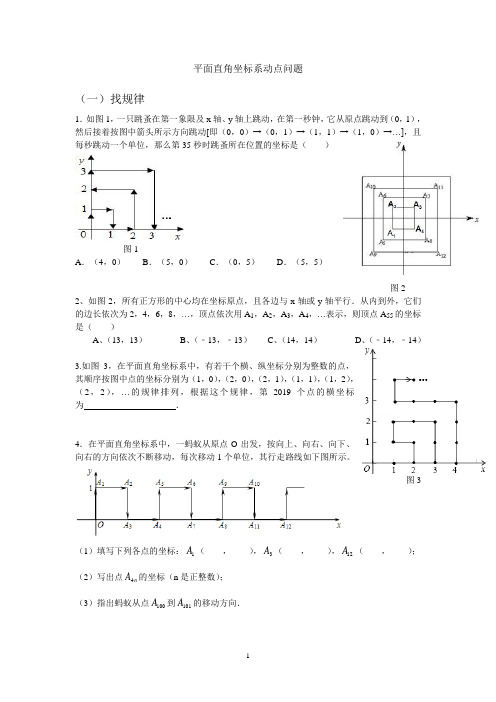
平面直角坐标系动点问题(一)找规律1.如图1,一只跳蚤在第一象限及x 轴、y 轴上跳动,在第一秒钟,它从原点跳动到(0,1),然后接着按图中箭头所示方向跳动[即(0,0)→(0,1)→(1,1)→(1,0)→…],且每秒跳动一个单位,那么第35秒时跳蚤所在位置的坐标是( )图1A .(4,0)B .(5,0)C .(0,5)D .(5,5)图22、如图2,所有正方形的中心均在坐标原点,且各边与x 轴或y 轴平行.从内到外,它们的边长依次为2,4,6,8,…,顶点依次用A 1,A 2,A 3,A 4,…表示,则顶点A 55的坐标是( ) A 、(13,13) B 、(﹣13,﹣13) C 、(14,14) D 、(﹣14,﹣14)3.如图3,在平面直角坐标系中,有若干个横、纵坐标分别为整数的点,其顺序按图中点的坐标分别为(1,0),(2,0),(2,1),(1,1),(1,2),(2,2),…的规律排列,根据这个规律,第2019个点的横坐标为 .4.在平面直角坐标系中,一蚂蚁从原点O 出发,按向上、向右、向下、向右的方向依次不断移动,每次移动1个单位,其行走路线如下图所示。
图3(1)填写下列各点的坐标:1A (____,____),3A (____,____),12A (____,____); (2)写出点n A 4的坐标(n 是正整数); (3)指出蚂蚁从点100A 到101A 的移动方向.5.观察下列有序数对:(3,﹣1)(﹣5,)(7,﹣)(﹣9,)…根据你发现的规律,第100个有序数对是 .6、观察下列有规律的点的坐标:依此规律,A 11的坐标为 ,A 12的坐标为 .7、以0为原点,正东,正北方向为x 轴,y 轴正方向建立平面直角坐标系,一个机器人从原点O 点出发,向正东方向走3米到达A 1点,再向正北方向走6米到达A 2,再向正西方向走9米到达A 3,再向正南方向走12米到达A 4,再向正东方向走15米到达A 5,按此规律走下去,当机器人走到A 6时,A 6的坐标是 .8、如图,将边长为1的正三角形OAP 沿x 轴正方向连续翻转2019次,点P 依次落在点201921,,,P P P 的位置,则点2019P 的横坐标为 .9、如图,在平面直角坐标系上有个点P (1,0),点P 第1次向上跳动1个单位至点P 1(1,1),紧接着第2次向左跳动2个单位至点P 2(﹣1,1),第3次向上跳动1个单位,第4次向右跳动3个单位,第5次又向上跳动1个单位,第6次向左跳动4个单位,…,依此规律跳动下去,点P 第100次跳动至点P 100的坐标是 .点P 第2019次跳动至点P 2019的坐标是 .图4 图5 10、如图5,已知A l (1,0),A 2(1,1),A 3(﹣1,1),A 4(﹣1,﹣1),A 5(2,﹣1),….则点A 2019的坐标为 .1PAOyxP1. 如图,一个粒子在第一象限内及x 、y 轴上运动,在第一分钟内它从原点运动到()1,0,而后它接着按图所示在x 轴、y 轴平行的方向上来回运动,且每分钟移动1个长度单位,那么,在1989分钟后这个粒子所处的位置是( ).A .()35,44B .()36,45C .()37,45D .()44,352. 如果将点P 绕定点M 旋转180︒后与点Q 重合,那么称点P 与点Q 关于点M 对称,定点M 叫做对称中心,此时,点M 是线段PQ 的中点,如图,在直角坐标系中,ABO △的顶点A 、B 、O 的坐标分别为()1,0、()0,1、()0,0,点1P ,2P ,3P ,…中相邻两点都关于ABO △的一个顶点对称,点1P 与点2P 关于点A 对称,点2P 与点3P 关于点B 对称,点3P 与点4P 关于点O 对称,点4P 与点5P 关于点A 对称,点5P 与点6P 关于点B 对称,点6P 与点7P 关于点O 对称,…对称中心分别是A ,B ,O ,A ,B ,O ,…且这些对称中心依次循环,已知1P 的坐标是()1,1.试写出点2P 、7P 、100P 的坐标.3. 如图,在平面直角坐标系中,四边形各顶点的坐标分别为:()0,0A ,()7,0B ,()9,5C ,()2,7D .(1)求此四边形的面积.(2)在坐标轴上,你能否找到一点P ,使50PBC S =△?若能,求出P 点坐标;若不能,请说明理由.4. 如图①,已知OABC 是一个长方形,其中顶点A 、B 的坐标分别为()0,a 和()9,a ,点E在AB 上,且13AE AB =,点F 在OC 上,且13OF OC =.点G 在OA 上,且使GEC △的面积为20,GFB △的面积为16,试求a 的值.图②5. 如图,在平面直角坐标系中,有若干个横坐标分别为整数的点,其顺序按图中“→”方向排列,如()1,0,()2,0,()2,1,()1,1,()1,2,()2,2……根据这个规律,第2019个点的横坐标为_______.6. 在平面直角坐标系xOy 中,我们把横、纵坐标都是整数的点叫做整点.已知点()0,4A ,点B 是x 轴正半轴上的整点,记AOB △内部(不包括边界)的整点个数为m ,当3m =时,点B 的横坐标的所有可能值是_______;当点B 的横坐标为4n (n 为正整数)时,m =________(用含n 的代数式表示).7. 如图,把自然数按图的次序排在直角坐标系中,每个自然数都对应着一个坐标.如1的对应点是原点()0,0,3的对应点是()1,1,16的对应点是()1,2-,那么2019的对应点的坐标是_______.8.如图,长方形BCDE 的各边分别平行于x 轴或y 轴,物体甲和物体乙由点()2,0A 同时出发,沿长方形BCDE 的边作环绕运动,物体甲按逆时针方向以每秒1个单位长度的速度匀速运动,物体乙按顺时针方向以每秒2个单位长度的速度匀速运动,求两个物体开始运动后的第2019次相遇地点的坐标.9. 在平面直角坐标系中,如图①,将线段AB 平移至线段CD ,连接AC 、BD . (1)直接写出图中相等的线段、平行的线段; (2)已知()3,0A -、()2,2B --,点C 在y 轴的正半轴上.点D 在第一象限内,且5ACD S =△,求点C 、D 的坐标;(3)如图②,在平面直角坐标系中,已知一定点,()1,0M ,两个动点(),21E a a +、(),23F b b -+,请你探索是否存在以两个动点E 、F 为端点的线段EF 平行于线段OM 且等于线段OM .若存在,求以点O 、M 、E 、F 为顶点的四边形的面积,若不存在,请说明理由.图②10 . 如图,AOCD 是放置在平面直角坐标系内的梯形,其中O 是坐标原点.点A 、C 、D 的坐标分别为()0,8,()5,0,()3,8,若点P 在梯形内,且PAD POC S S =△△,PAO PCD S S =△△,求P 点的坐标.11. 操作与研究(1)对数轴上的点P 进行如下操作:先把点P 表示的数乘以13,再把所得数对应的点向右平移1个单位,得到点P 的对应点'P B .点A ,B 在数轴上,对线段AB 上的每个点进行上述操作后得到线段''A B ,其中点A ,B 的对应点分别为'A ,'B .如图①,若点A 表示的数是3-,则点'A 表示的数是______;若点'B 表示的数是2,则点表示的数是______;已知线段AB 上的点E 经过上述操作后得到的对应点'E 与点E 重合,则点E 表示的数是_________.(2)如图②,在平面直角坐标系xOy 中,对正方形ABCD 及其内部的每个点进行如下操作:把每个点的横、纵坐标都乘以同一个实数a ,将得到的点先向右平移m 个单位,再向上平移n 个单位()0,0m n >>,得到正方形''''A B C D 及其内部的点,其中点A ,B 的对应点分别为'A ,'B .已知正方形ABCD 内部的一个点F 经过上述操作后得到的对应点'F 与点F 重合,求点F 的坐标.图①A B'-1-2-3-412340图②(二)几何综合问题1、已知点A 的坐标是(3,0)、AB=5,(1)当点B 在X 轴上时、求点B 的坐标、(2)当AB//y 轴时、求点B 的坐标2、如图,已知A 、B 两村庄的坐标分别为(2,2)、(7,4),一辆汽车在x 轴上行驶,从原点O 出发.(1)汽车行驶到什么位置时离A 村最近?写出此点的坐标. (2)汽车行驶到什么位置时离B 村最近?写出此点的坐标. (3)请在图中画出汽车行驶到什么位置时,距离两村的和最短?4.如图,在平面直角坐标系中,点A ,B 的坐标分别为(-1,0),(3,0),现同时将点A ,B 分别向上平移2个单位,再向右平移1个单位,分别得到点A ,B 的对应点C ,D ,连接AC ,BD ,CD .(1)求点C ,D 的坐标及四边形ABDC 的面积ABDC S 四边形D C 3-1BA O x y PDCBAOx y (2)在y 轴上是否存在一点P ,连接PA ,PB ,使PAB S ∆=ABDC S 四边形,若存在这样一点,求出点P 的坐标,若不存在,试说明理由.(3)点P 是线段BD 上的一个动点,连接PC ,PO ,当点P 在BD 上移动时(不与B ,D 重合)给出下列结论:①DCP BOP CPO ∠+∠∠的值不变,②DCP CPOBOP∠+∠∠的值不变,其中有且只有一个是正确的,请你找出这个结论并求其值.5.已知:在平面直角坐标系中,四边形ABCD 是长方形, ∠A =∠B =∠C =∠D =90°,AB ∥CD ,AB =CD =8cm ,AD =BC =6cm ,D 点与原点重合,坐标为(0,0). (1)写出点B 的坐标.(2)动点P 从点A 出发以每秒3个单位长度的速度向终点B 匀速运动, 动点Q 从点C 出发以每秒4个单位长度的速度沿射线CD 方向匀速运动,若P ,Q 两点同时出发,设运动时间为t 秒,当t 为何值时,PQ ∥BC ?(3)在Q 的运动过程中,当Q 运动到什么位置时,使△ADQ 的面积为9? 求出此时Q 点的坐标.6.如图在平面直角坐标系中,A(a,0),B(b,0),(﹣1,2).且|2a+b+1|+=0.(1)求a、b的值;(2)①在y轴的正半轴上存在一点M,使S△COM=S△ABC,求点M的坐标.②在坐标轴的其他位置是否存在点M,使S△COM=S△ABC仍成立?若存在,请直接写出符合条件的点M的坐标.7.如图,在下面的直角坐标系中,已知A(0,a),B(b,0),C(b,4)三点,其中a,b 满足关系式.(1)求a,b的值;(2)如果在第二象限内有一点P(m,),请用含m的式子表示四边形ABOP的面积;(3)在(2)的条件下,是否存在点P,使四边形ABOP的面积与△ABC的面积相等?若存在,求出点P的坐标;若不存在,请说明理由.8.在平面直角坐标系中,点A(a,b)是第四象限内一点,AB⊥y轴于B,且B(0,b)是y轴负半轴上一点,b2=16,S△AOB=12.(1)求点A和点B的坐标;(2)如图1,点D为线段OA(端点除外)上某一点,过点D作AO垂线交x轴于E,交直线AB于F,∠EOD、∠AFD的平分线相交于N,求∠ONF的度数.(3)如图2,点D为线段OA(端点除外)上某一点,当点D在线段上运动时,过点D作直线EF交x轴正半轴于E,交直线AB于F,∠EOD,∠AFD的平分线相交于点N.若记∠ODF=α,请用α的式子表示∠ONF的大小,并说明理由.。
平面内直角坐标系中坐标旋转变换公式
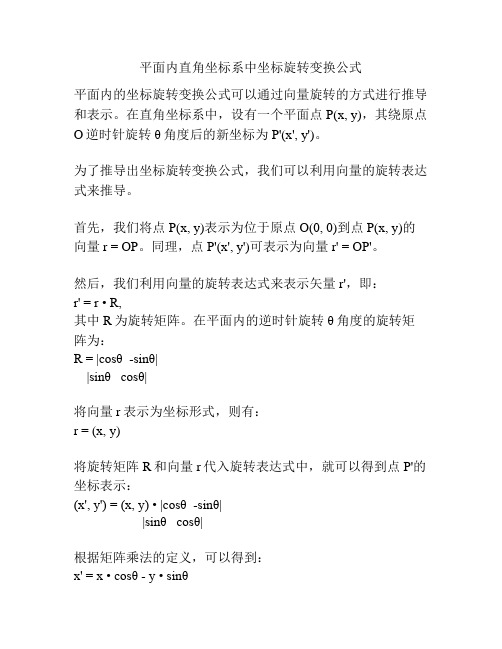
平面内直角坐标系中坐标旋转变换公式平面内的坐标旋转变换公式可以通过向量旋转的方式进行推导和表示。
在直角坐标系中,设有一个平面点P(x, y),其绕原点O逆时针旋转θ角度后的新坐标为P'(x', y')。
为了推导出坐标旋转变换公式,我们可以利用向量的旋转表达式来推导。
首先,我们将点P(x, y)表示为位于原点O(0, 0)到点P(x, y)的向量r = OP。
同理,点P'(x', y')可表示为向量r' = OP'。
然后,我们利用向量的旋转表达式来表示矢量r',即:r' = r • R,其中R为旋转矩阵。
在平面内的逆时针旋转θ角度的旋转矩阵为:R = |cosθ -sinθ||sinθ cosθ|将向量r表示为坐标形式,则有:r = (x, y)将旋转矩阵R和向量r代入旋转表达式中,就可以得到点P'的坐标表示:(x', y') = (x, y) • |cosθ -sinθ||sinθ cosθ|根据矩阵乘法的定义,可以得到:x' = x • cosθ - y • sinθy' = x • sinθ + y • cosθ综上所述,平面内的坐标旋转变换公式为:x' = x • cosθ - y • sinθy' = x • sinθ + y • cosθ这个公式表示了坐标旋转变换的关系,可以使用这个公式将原平面上的点P(x, y)绕原点逆时针旋转θ角度后,得到新的坐标P'(x', y')。
在具体应用中,可以使用这个公式来进行坐标旋转变换。
例如,在计算机图形学中,可以使用这个公式将图像绕指定点进行旋转;在机器人学中,可以使用这个公式计算机器人末端执行器的位置;在仿真实验中,可以使用这个公式模拟物体的运动等等。
总之,坐标旋转变换公式提供了一种计算平面内点的旋转后坐标的方法,通过对原点到点P的向量进行旋转矩阵的乘法运算,可以计算出点P'的新坐标。
平面直角坐标系规律专题(学生版)
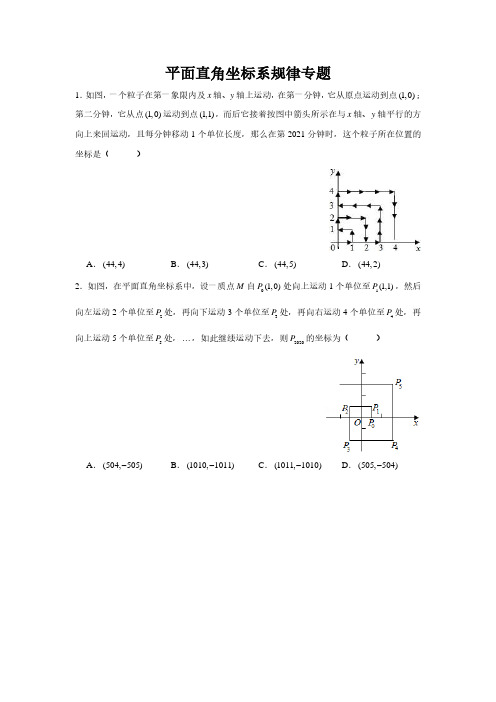
平面直角坐标系规律专题1.如图,一个粒子在第一象限内及x 轴、y 轴上运动,在第一分钟,它从原点运动到点(1,0);第二分钟,它从点(1,0)运动到点(1,1),而后它接着按图中箭头所示在与x 轴、y 轴平行的方向上来回运动,且每分钟移动1个单位长度,那么在第2021分钟时,这个粒子所在位置的坐标是( )A .(44,4)B .(44,3)C .(44,5)D .(44,2)2.如图,在平面直角坐标系中,设一质点M 自0(1,0)P 处向上运动1个单位至1(1,1)P ,然后向左运动2个单位至2P 处,再向下运动3个单位至3P 处,再向右运动4个单位至4P 处,再向上运动5个单位至5P 处,⋯,如此继续运动下去,则2020P 的坐标为( )A .(504,505)−B .(1010,1011)−C .(1011,1010)−D .(505,504)−3.如图,在平面直角坐标系中,边长为1的正方形111OA B C 的两边在坐标轴上,以它的对角线1OB 为边作正方形122OB B C ,再以正方形122OB B C 的对角线2OB 为边作正方形233OB B C ,以此类推⋯、则正方形201920202020OB B C 的顶点2020B 的坐标是( )A .1010(2,0)B .(0,10102)C .1010(0,2)−D .1010(2−,0)4.如图,一机器人从原点出发按图示方向作折线运动,第1次从原点到1(1,0)A ,第2次运动到2(1,1)A ,第3次运动到3(1,1)A −,第4次运动到4(1,1)A −−,第5次运动到5(2,1)A −⋯则第15次运动到的点15A 的坐标是( )A .(4,4)B .(4,4)−C .(4,4)−−D .(5,4)−5.如图,在平面直角坐标系中,O 为坐标原点,点N 在x 轴正半轴上,点1A ,2A ,3A ,…在射线ON 上,点1B ,2B ,3B ,…在射线OM 上,30MON ∠=︒,△112A B A ,△223A B A ,334A B A △,…,为等边三角形,依此类推,若11OA =,则点2020B 的横坐标是( )A .201723⨯B .201823⨯C .201923⨯D .202023⨯6.如图,在平面直角坐标系中,将边长为3,4,5的Rt ABO ∆沿x 轴向右滚动到△11AB C 的位置,再到△112A B C 的位置⋯依次进行下去,发现(3,0)A ,1(12,3)A ,2(15,0)A ⋯那么点10A 的坐标为( )A .(60,3)B .(60,0)C .(63,3)D .(63,0)7.如图,平面直角坐标系中,已知点(1,1)A ,(1,1)B −,(1,2)C −−,(1,2)D −,动点P 从点A 出发,以每秒2个单位的速度按逆时针方向沿四边形ABCD 的边做环绕运动;另一动点Q 从点C 出发,以每秒3个单位的速度按顺时针方向沿四边形CBAD 的边做环绕运动,则第2019次相遇点的坐标是( )A .(1,1)−−B .(1,1)−C .(2,2)−D .(1,2)8.如图,在平面直角坐标系上有点(1,0)A ,点A 第一次跳至点1(1,1)A −,第二次向右跳动3个单位至点2(2,1)A ,第三次跳至点3(2,2)A −,第四次向右跳动5个单位至点4(3,2)A ,…依此规律跳动下去,点A 第100次跳至点100A 的坐标是( )A .(50,50)B .(51,50)C .(50,51)D .(49,50)9.如图,已知点1(1,0)A,2(1,1)A,3(1,1)A−,4(1,1)A−−,5(2,1)A−,…,则点2020A的坐标为()A.(505,505)B.(506,505)−C.(505,505)−−D.(505,505)−10.如图,在平面直角坐标系中,11OA=,将边长为1的正方形一边与x轴重合按图中规律摆放,其中相邻两个正方形的间距都是1,则点2022A的坐标为()A.(1009,1)B.(1010,1)C.(1011,0)D.(1011,1)−11.如图,在48⨯的长方形网格OABC中,动点P从(0,3)出发,沿箭头所示方向运动,每当碰到长方形的边时反弹,反弹时反射角等于入射角,当点P第2020次碰到矩形的边时,点P的坐标为()A.(1,4)B.(5,0)C.(6,4)D.(8,3)12.在平面直角坐标系中,横坐标、纵坐标都为整数的点称为整点,请你观察图中正方形1111A B C D ,2222A B C D ,3333A B C D ,每个正方形四条边上的整点的个数.按此规律推算出正方形20202020A B C D 四条边上的整点的总个数有( )A .152B .156C .160D .16813.如图,在平面直角坐标系中,有若干个整数点,其顺序按图中方向排列,如(1,0),(2,0),(2,1),(3,2),(3,1),(3,0),……,根据这个规律探索可得,第120个点的坐标为( )A .(16,0)B .(15,14)C .(15,0)D .(14,13)14.如图,在平面直角坐标系中,一动点从原点O 出发,按向上,向右,向下,向右的方向不断地移动,每移动一个单位,得到点1(0,1)A ,2(1,1)A ,3(1,0)A ,4(2,0)A ,那么2020A 坐标为( )A .(2020,1)B .(2020,0)C .(1010,1)D .(1010,0)15.如图,在平面直角坐标系上有个点(1,0)A −,点A 第1次向上跳动1个单位至点1(1,1)A −,紧接着第2次向右跳动2个单位至点2(1,1)A ,第3次向上跳动1个单位,第4次向左跳动3个单位,第5次又向上跳动1个单位,第6次向右跳动4个单位,…,依次规律跳动下去,点A 第2019次跳动至点2019A 的坐标是( )A .(505,1009)−B .(505,1010)C .(504,1009)−D .(504,1010)16.如图所示,在平面直角坐标系中,半径均为1个单位的半圆1O ,2O ,3O ,…组成一条平滑的曲线,点P 从原点O 出发,沿这条曲线向右运动,速度为每秒2π个单位长度,则第2018秒时,点P 的坐标是点( )A .(2017,1)B .(2018,0)C .(2017,1)−D .(2019,0)17.如图,动点P 在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2)⋯按这样的运动规律经过第2021次运动后,动点P 的坐标是 .18.在学校,每一位同学都对应着一个学籍号.在数学中也有一些对应.现定义一种对应关系f ,使得数对(,)x y 和数z 是对应的,此时把这种关系记作:(,)f x y z =.对于任意的数m ,()n m n >,对应关系f 由如表给出:(,)x y (,)n n (,)m n (,)n m(,)f x ynm n −m n +如:(1,2)213f =+=,f (2,1)211=−=,f (1,1)1−−=−,则使等式(12,3)2f x x +=成立的x 的值是 .19.按照如图的方式排列,若第一个点为(0,0),则第100个点的坐标为 .20.如图,在平面直角坐标系中,第一次将OAB ∆变换成△11OA B ,第二次将△11OA B 变换成△22OA B ,第三次将△22OA B 变换成△33OA B ,⋯,将OAB ∆进行n 次变换,得到△n n OA B ,观察每次变换中三角形顶点坐标有何变化,找出规律,推测2020A 的坐标是 .。
坐标轴章节知识点总结

坐标轴章节知识点总结一、坐标轴的定义坐标轴是一条可以用来表示位置的直线,它将平面分为两部分,分别叫做正半轴和负半轴。
在数学中,我们通常用坐标轴来表示点的位置,坐标轴上有原点,原点是坐标轴的起点,我们用它作为参照点来确定其他点的位置。
坐标轴通常是水平和垂直的两条直线,它们相交在原点处,形成一个直角。
我们可以用坐标轴来表示平面上的点,这个描述点的方法叫做坐标。
坐标通常用有序数对(x,y)来表示,x表示点在水平方向上的位置,y表示点在垂直方向上的位置。
二、基本性质1. 坐标轴的方向性:根据坐标轴的方向,可以确定一个点的位置。
2. 坐标轴的正负性:根据坐标轴的正负性,可以确定一个点在坐标轴的哪一侧。
3. 坐标轴的数值大小:根据坐标轴的数值大小,可以确定一个点在坐标轴上的具体位置。
三、坐标系坐标系是一种用来确定点位置的数学工具,它包括数学坐标系和物理坐标系两种类型。
数学坐标系用来表示数学问题中的点位置,物理坐标系用来表示物理问题中的点位置。
在数学坐标系中,我们通常用直角坐标系和极坐标系来表示点的位置。
四、直角坐标系直角坐标系是平面上最常见的坐标系,它由两条垂直的坐标轴组成,通常分别用x轴和y轴表示。
x轴水平向右为正,向左为负;y轴竖直向上为正,向下为负。
直角坐标系的原点是两条坐标轴的交点,我们用它来作为参照点来确定其他点的位置。
在直角坐标系中,我们可以用有序数对(x,y)来表示点的位置,x表示点在x轴上的位置,y表示点在y轴上的位置。
1. 直角坐标系中的坐标变换在直角坐标系中,我们可以进行坐标变换的操作,包括平移、旋转、对称等操作。
平移是指将点在坐标轴上沿着某个方向移动一定距离,旋转是指将点绕原点旋转一定角度,对称是指将点关于某个点、直线或平面进行对称变换。
在数学中,我们通常用矩阵来表示这些变换的操作,通过矩阵的乘法来实现对点的坐标变换。
2. 直角坐标系中的距离公式在直角坐标系中,我们可以通过两点的坐标来计算它们之间的距离。
平面直角坐标系动点问题
平面直角坐标系动点问题一、引言平面直角坐标系是数学中非常基础的概念,它可以用来描述二维空间中的点和图形。
在平面直角坐标系中,我们可以通过坐标轴上的数值来确定一个点的位置。
而动点问题则是将平面直角坐标系与运动学相结合,用于描述物体在平面内运动过程中的位置变化。
二、基本概念1. 平面直角坐标系平面直角坐标系由两条互相垂直的数轴组成,分别称为x轴和y轴。
它们交于原点O,并且每个点都可以用一个有序数对(x, y)来表示。
2. 动点动点是指在平面内移动的一个点,它可以沿着任意路径运动,并且在不同时间处于不同位置。
3. 运动学运动学是研究物体在空间中运动状态和规律的学科。
它包括了物体位置、速度、加速度等概念。
三、平面直角坐标系与动点问题1. 平移运动平移运动是指物体沿着一条直线或曲线路径做匀速运动,在这种情况下,我们可以通过简单地改变物体在x轴和y轴上的坐标来描述它的位置变化。
例如,一个物体从点A沿着直线运动到点B,我们可以通过改变x轴和y轴上的坐标来描述这个过程。
设A的坐标为(x1, y1),B的坐标为(x2, y2),则在t时刻物体的位置可以表示为:x = x1 + (x2 - x1) * ty = y1 + (y2 - y1) * t其中t表示时间,它的取值范围通常是0到1。
2. 旋转运动旋转运动是指物体绕固定点或者绕自身中心做圆周运动,在这种情况下,我们需要使用极坐标系来描述物体的位置。
极坐标系由极轴和极角两个参数组成,其中极轴表示物体到原点O的距离,而极角表示物体与x轴之间的夹角。
在旋转运动中,我们通常会使用弧度制来表示角度。
例如,一个物体以原点O为中心顺时针旋转α角度后到达点P,则P 的极坐标可以表示为:r = OP = √(x^2 + y^2)θ = α其中r表示距离原点O的距离,而θ表示与x轴之间的夹角。
3. 抛射运动抛射运动是指物体在空中做抛体运动,它的轨迹通常是一个抛物线。
在这种情况下,我们需要使用二元二次方程来描述物体的位置。
平面直角坐标系综合讲义

平面直角坐标系综合讲义一、【知识点拨】1.坐标平面内的点与有序实数对一一对应;2.点P (a ,b )到x 轴的距离为│b │,• 到y 轴距离为│a │, 到原点距离为22a b +;3.各象限内点的坐标的符号特征:P (a ,b ), P 在第一象限⇔a>0且b>0, P 在第二象限⇔a<0,b>0, P 在第三象限⇔a<0,b<0, P 在第四象限⇔a>0,b<0;4.点P (a ,b ):若点P 在x 轴上⇔a 为任意实数,b=0;P 在y 轴上⇔a=0,b 为任意实数;P 在一,三象限坐标轴夹角平分线上⇔a=b ; P 在二,四象限坐标轴夹角平分线上⇔a=-b ; 5.点A (x 1,y 1),B (x 1,y 2):A ,B 关于x 轴对称⇔x 1=x 2,y 1=-y 2; A 、B 关于的y 轴对称⇔x 1=-x 2,y 1=y 2; A ,B 关于原点对称⇔x 1=-x 2,y 1=-y 2; AB ∥x 轴⇔y 1=y 2且x 1≠x 2;AB ∥y 轴⇔x 1=x 2且y 1≠y 2(A ,B 表示两个不同的点). 6点的平移:在平面直角坐标系中,教师寄语:对那些有自信心而不介意于暂时成败的人,没有所谓失败!对怀着百折不挠的坚定意志的人,没有所谓失败!对别人放手,而他仍然坚持;别人后退,而他仍然前冲的人,没有所谓失败!对每次跌倒,而立刻站起来;每次坠地,反会像皮球一样跳得更高的人,没有所谓失败!——雨果将点(x,y)向右平移a个单位长度,可以得到对应点(x+a ,y);将点(x,y)向左平移a个单位长度,可以得到对应点(x-a,y)将点(x,y)向上平移b个单位长度,可以得到对应点(x,y+b);将点(x,y)向下平移b个单位长度,可以得到对应点(x,y-b)。
二、【例题评析】例1(2011贵州贵阳,10分)【阅读】在平面直角坐标系中,以任意两点P(x1,y1)、Q(x2,y2)为端点的线段中点坐标为(x1+x22,y1+y22).【运用】如图,矩形ONEF的对角线交于点M,ON、OF分别在x轴和y轴上,O为坐标原点,点E的坐标为(4,3),则点M的坐标为______;例2,在直角坐标系中,点A,B的坐标分别是(0,6),(-8,0),求Rt△ABO 的内心的坐标.三【综合能力训练】1.如图所示,在平面直角坐标系中,点A的坐标是(10,0),•点B的坐标为(8,0),点C,D在以OA为直径的半圆M上,且四边形OCDB是平行四边形,•求点C的坐标.2.如图所示,在直角坐标系中,矩形ABCD的边AD在x轴上,•点A在原点,AB=3,AD=5,矩形以每秒2个单位长度沿x轴正方向做匀速运动.同时点P从A点出发以每秒1个单位长度沿A─B─C─D的路线做匀速运动.当P点运动到D点时停止运动,矩形ABCD也随之停止运动.(1)求P点从A点运动到D点所需的时间;(2)设P点运动时间为t(s);①当t=5时,求出点P的坐标;②若△DAP的面积为S,试求出S与t之间的函数关系式(并写出相应的自变量t•的取值范围).3.将一矩形纸片OABC放在直角坐标系中,O为原点,C在x轴上,•OA=6,OC=10.(1)如图所示,在OA上取一点E,将△EOC沿EC折叠,使O点落在AB 边上的D点,求E点的坐标;(2)如图所示,将矩形变为矩形OA′B′C′,在OA′,OC′边上选择取适当的点E′,F′,将△E′OF沿E′F折叠,使O点落在A′B′边上的D′点,过D′作D′G•∥A′O交E′F于T点,交OC′于G点,求证:TG=A′E′.(3)在图的条件下,设T(x,y):探求:y与x之间的函数关系式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖ 例 设运动沿x 轴进行.令初始位置是x0 ,初始速度 是v0 ,加速度a 是常量 ❖ 解答:加速度a = dv/dt 可得 dv = adt
速度 v = dx/dt 可得 dx = vdt
❖ 例1.4 已知质点的运动学方程 ❖ 解: (1)轨迹方程,根据
r(t)
2
运动方程 x(t)i y(t
)
j
z
(t)k
z
y
r P
o x
yP
x x(t) 分量式 y y(t)
y(t)
r(t)
z z(t)
从中消去参数 t 得轨迹方程
o
z(t)
x(t)
x
f (x, y, z) 0
z
3 位移
y
rvA A
r rvB
B
y
yB yA
rvA A
r rvB
B
yB yA
o
xA
xB x
若质点在三维空间中运动
xB xA
r
(xB
xA
)i (Βιβλιοθήκη yByA)j
(zB
z A )k
位移的大小为 r x2 y2 z2
4 路程(s ): 质点实际运动轨迹的长度.
位移的物理意义
y
A) 确切反映物体在空间
位置的变化, 与路径无关,只
P1 rs P2
决定于质点的始末位置. B)反映了运动的矢量
第1章 质点力学
直角坐标系中的运动
一 参考系 质点 1 参考系 为描述物体的运动而选择的标准物叫做参考系.
➢ 选取的参考系不同,对物体运动情况的描述不 同,这就是运动描述的相对性.
➢ 坐标系:参考系的数学抽象. 2 质点
如果我们研究某一物体的运动,而可以忽略其 大小和形状对物体运动的影响,若不涉及物体的转 动和形变,我们就可以把物体当作是一个具有质量 的点(即质点)来处理 .
➢ 物体能否抽象为质点,视具体情况而定.
太阳 r
地
R球
地球
绕
太
阳
公
转
地——日间平均距离 r :1.5 ×108 km
地球半径 R : 6.37 × 103 km r
➢ 质点是经过科学抽象而形成的理想化的物理模 型 . 目的是为了突出研究对象的主要性质 , 暂不考 虑一些次要的因素 .
二 位置矢量 运动方程 位移
d r (C) dt
(D)
(dx)2 (dy)2 dt dt
四 加速度 (反映速度变化快慢的物理量)
1) 平均加速度
单位时间内的速度增
量即平均加速度
av vv
av
与
vv
t
同方向
.
2)(瞬时)加速度
av lim vv dvv t0 t dt
y vvA
vvB
B
A
O
x
vvA
vv
vvB
加速度
av
d2z dt 2
❖ 例1.1 质点沿直线运动,加速度a = 2 + 2t ,且t = 0 s 时,x0 = 2 m; v0 = 1 m/s,求质点的运动方程
❖ 解答:从加速度定义式a = dv/dt 可得 dv = adt
❖ 例1.2 质点沿直线运动,速度v(t) = 2 exp(-t),求质 点在0 < t < 1 s 内的位移
(B) 一般情况, 位移
大小不等于路程.
y
s
p1
'
rs
p2
r(t1)
r(t2 )
vr s
O
z
x
(C)什么情况 r s?
不改变方向的直线运动; 当 t 0 时 r s .
(D)位移是矢量, 路程是标量.
三 速度
1 平均速度
在t 时间内, 质点从点
A 运动到点 B, 其位移为
y
r (t
t)
B
s r
o
x
o
xA
xB x
xB xA
经过时间间隔 t 后, 质点位置矢量发生变化, 把B 的由位始移点矢A量指,向简终称点位B移的. 有向线r段rrB称为rA点 A 到
rA
rB
xAi xBi
yA
yB
j
j
位移 r rB rA
y
yB yA
rvA A
r rvB
B
yB yA
(xB xA)i ( yB yA) j
r r(t t) r(t)
A
tv时间内r, 质点x的i平均y速j度 o
r(t)
x
或
vtvxit
vy
t j
平均速度 vv 与 r同方向.
平均速度大小 v (x)2 (y)2 t t
2 瞬时速度
当 t 0 时平均速度的极限值叫做瞬时速度,
简称速度
v lim
r
dr
t0 t dt
v
lim
x
i
(2)求解 瞬时速度矢量,瞬时加速度矢量
❖ 例1.5 已知质点匀速圆周运动的运动学方程 ❖ 解: 求解速度
求解 加速度
1 位置矢量
确定质点P某一时刻在
y
坐位标置系矢里 量的, 简位称置位的矢物r理.量称
r
xi
yj
zk
z
y j
o
k
r
i x
*P
x
式中 i、j 、k 分别为x、y、z z
方向的单位矢量.
位矢r的值为
r rv x2 y2 z2
r 位矢 的方向余弦
cos x r
cos y r
cos z r
r(t1)
r
r(t2 )
性和r叠加性xi.
yj
zk
z
O
P1(x1, y1, z1)
x
r x2 y 2 z 2
注意 r r
P2 (x2 , y2 , z2 ) 位矢长度的变化
r
x2 2
y22 z22
x12 y12 z12
讨论 位移与路程
(A)P1P2 两点间的路程
是而不位移唯一r的是, 唯可一以的是.s或s
v
ds dt
et
v vv (dx )2 (dy )2 (dz )2 v ds
dt dt dt
dt
平均速率 v s t
瞬时速率 v ds
y r(t t)
B s r
讨论
dt
r (t)
A
o
x
一运动质点在某瞬时位于矢径 r(x, y) 的端点
处,其速度大小为
dr (A) dt
dr (B) dt
lim
y
j
t0 t t0 t
当 t 0 时,dr ds
v
ds dt
et
当质点做曲线运动时,质点在某一点的速度方向
就是沿该点曲线的切线方向 .
v
dx
i
dy
j
v
dt vxi
dt
vy
j
y vy
若质点在三维空间中运动,
v
vx
其速度为
v
dx
i
dy
j
dz
k
o
x
dt
瞬时速率:速度
vvd的t 大小d称t 为速率
dvv dt
d 2 rv dt 2
dvx
i
dv
y
dt dt
j
加速度大小 a lim v t0 t
ax2
a
2 y
质点作三维运动时加速度为
av
v axi
ay
v j
v azk
加速度大小
ax
dvx dt
d2x dt 2
ay
dvy dt
d2 y dt 2
a ax2 ay2 az2
az
dvz dt