案例五旋转编码器的安装与应用
伺服电机旋转编码器旋变安装

伺服电机旋转编码器安装一.伺服电机转子反馈的检测相位与转子磁极相位的对齐方式1.永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类直流特性”,这种控制方法也被称为磁场定向控制(FOC),达成FOC控制目标的外在表现就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示:图1因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,就可以达成FOC控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90度电角度,如下图所示:图2如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?由图1可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据电角度相位生成与反电势波形一致的正弦型相电流波形了。
在此需要明示的是,永磁交流伺服电机的所谓电角度就是a相(U相)相反电势波形的正弦(Sin)相位,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系;另一方面,电角度也是转子坐标系的d轴(直轴)与定子坐标系的a轴(U轴)或α轴之间的夹角,这一点有助于图形化分析。
在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位。
当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差0度相位的平衡位置上,如下图所示:图3对比上面的图3和图2可见,虽然a相(U相)绕组(红色)的位置同处于电磁场波形的峰值中心(特定角度),但FOC控制下,a相(U相)中心与永磁体的q轴对齐;而空载定向时,a相(U相)中心却与d轴对齐。
也就是说相对于初级(定子)绕组而言,次级(转子)磁体坐标系的d轴在空载定向时有会左移90度电角度,与FOC控制下q轴的原有位置重合,这样就实现了转子空载定向时a轴(U轴)或α轴与d轴间的对齐关系。
旋转编码器的安装与应用
旋转编码器的安装与应用案例五旋转编码器的安装与应用1(项目训练目的掌握旋转编码器的安装与使用方法。
2(项目训练设备旋转编码器及相应耦合器一套。
3(项目训练内容先熟悉旋转编码器的使用说明书。
(1)旋转编码的安装步骤及注意事项安装步骤:第一步:把耦合器穿到轴上。
不要用螺钉固定耦合器和轴。
第二步:固定旋转编码器。
编码器的轴与耦合器连接时,插入量不能超过下列值。
E69-C04B型耦合器,插入量5.2mm;E69-C06B型耦合器,插人量5.5mm;E69-Cl0B型耦合器,插入量7.lmm。
第三步:固定耦合器。
紧固力矩不能超过下列值。
E69-C04B型耦合器,紧固力矩2.0kfg?cm;E69-C06B型耦合器,紧固力矩2.5kgf?cm;E69B-Cl0B型耦合器,紧固力矩4.5kfg?cm。
第四步:连接电源输出线。
配线时必须关断电源。
第五步:检查电源投入使用。
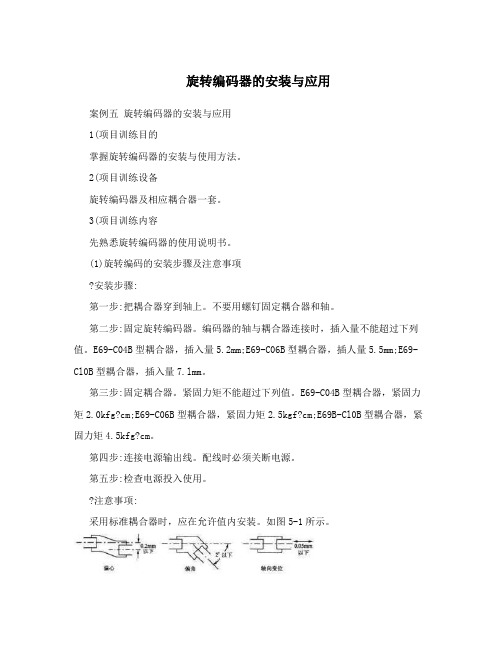
注意事项:采用标准耦合器时,应在允许值内安装。
如图5-1所示。
图5-1 标准耦合器安装连接带及齿轮结合时,先用别的轴承支住,再将旋转编码器和耦合器结合起来。
如图5-2所示。
图5-2 旋转编码器安装齿轮连接时,注意勿使轴受到过大荷重。
用螺钉紧固旋转编码器时,应用5kfg?cm左右的紧固力矩。
固定本体进行配线时,不要用大于3kg的力量拉线。
可逆旋转使用时,应注意本体的安装方向和加减法方向。
把设置的装置原点和编码器的Z相对准时,必须边确定Z相输出边安装耦合器。
使用时勿使本体上粘水滴和油污。
如浸入内部会产生故障。
(2)配线及连接配线应在电源0FF状态下进行。
电源接通时,若输出线接触电源线,则有时会损坏输出回路。
若配线错误,则有时会损坏内部回路,所以配线时应充分注意电源的极性等。
若和高压线、动力线并行配线,则有时会受到感应造成误动作或损坏。
延长电线时,应在10m以下。
还由于电线的分布容量,波形的上升、下降时间会延长,所以有问题时,应采用施密特回路等对波形进行整形。
旋转编码器编程原理实例

旋转编码器编程原理实例旋转编码器是一种常见的传感器设备,可以用于测量物体的旋转角度和方向。
它通常由光电转换器和代码盘组成,通过检测光电转换器接收到的光线来确定旋转方向和步数。
旋转编码器广泛应用于工控领域、机器人控制、汽车导航系统等。
1.硬件连接:首先,需要将旋转编码器与控制器板连接起来。
通常旋转编码器具有三个引脚:电源正极、电源负极和输出信号。
将正极连接到控制器板的电源输出引脚,负极连接到控制器板的地引脚,输出信号连接到控制器板的一些IO口。
2.编程环境设置:在编程环境中,需要导入旋转编码器的驱动库。
常见的编程语言如C、C++、Python等都有相应的驱动库可供选择。
导入驱动库后,可以使用库中提供的函数来操作旋转编码器。
3.初始化旋转编码器:在开始使用旋转编码器之前,需要初始化其参数。
这些参数包括旋转方向(顺时针或逆时针)、初始位置、步长等。
可以使用驱动库中提供的函数来设置这些参数。
4.监听旋转编码器信号:5.处理旋转编码器信号:在监听到旋转编码器的信号变化后,需要编写相应的处理函数来处理这些变化。
处理函数可以根据信号的变化来判断旋转方向和步数。
通常,顺时针旋转会使输出信号由低到高变化,逆时针旋转则相反。
6.更新位置数据:根据旋转编码器的信号变化和步数,可以更新物体的位置数据。
将每次旋转的步数加到当前位置上,就可以实时获取物体的旋转角度和方向。
通过以上步骤,就可以实现旋转编码器的编程原理。
下面是一个使用Python编写的旋转编码器示例程序:```pythonimport RPi.GPIO as GPIO#定义旋转编码器的IO口A_PIN=17B_PIN=18#初始化GPIOGPIO.setmode(GPIO.BCM)GPIO.setup(A_PIN, GPIO.IN)GPIO.setup(B_PIN, GPIO.IN)#记录旋转方向和步数direction = 0count = 0#定义旋转编码器的信号回调函数def encoder_callback(channel):global direction, countA = GPIO.input(A_PIN)B = GPIO.input(B_PIN)if A == B:direction = 1 # 顺时针旋转count += 1else:direction = -1 # 逆时针旋转count -= 1#监听旋转编码器的信号变化GPIO.add_event_detect(A_PIN, GPIO.BOTH, callback=encoder_callback)GPIO.add_event_detect(B_PIN, GPIO.BOTH, callback=encoder_callback)#主程序if __name__ == "__main__":try:while True:print("Direction:", direction)print("Count:", count)except KeyboardInterrupt:pass#清理GPIO资源GPIO.cleanup```以上程序示例了如何使用树莓派的GPIO接口来读取旋转编码器的信号,并实时获取旋转方向和步数。
旋转编码器定位使用说明

充注小车、运载小车定位使用说明定位原理:旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。
我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。
PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。
目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。
根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。
使用方法:依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。
当基点信号取的不稳定或不好,就会影响整个定位过程。
旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。
由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。
旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。
定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。
一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。
出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。
还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。
因此系统要运行平稳,不能有速度突变。
旋转编码器编程原理实例

如何使用旋转编码器、编码开关,旋转编码开关、编码器的原理在电子产品设计中,经常会用到旋转编码开关,也就是所说的旋转编码器、数码电位器、Rotary Encoder 。
它具有左转,右转功能,有的旋转编码开关还有按下功能。
为了使刚接触这种开关的朋友了解旋转开关的编程,我来介绍下它的原理和使用方法:以我厂生产的EC11型编码开关为例:如图1:三只脚:1 2 3脚一般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋转时,在1、3脚就有脉冲信号输出了。
两只脚:为按压开关,按下时导通,回复时断开。
在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出脚的信号有个相位差,如图2。
由此可见,如果输出1为高电平时,输出2出现一个高电平,这时开关就是向顺时针旋转;当输出1 为高电平,输出2出现一个低电平,这时就一定是逆时针方向旋转。
所以,在单片机编程时只需要判断当输出1为高电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。
旋转编码开关(Rotary Encoder switch)我前面介绍的2篇文章:“自己动手做收音机(LC72131)”和“电脑USB接口LCD液晶显示板(LCD Smartie)”都使用了这种旋转编码开关(Rotary Encoder switch),一个使用3脚的,后面一个使用5脚的,大家可能对这种玩意都不是很了解,但涉及到有调整的地方,这个玩意使用真是很爽,我弄了2个,研究了一下,供大家参考~5脚的ALPS:<-- ALPS Incremental Encoder (EC11 series)具有左转,右转,按下三个功能。
4、5脚是中间按下去的开关接线 1 2 3脚一般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋纽时,在1、3脚就有脉冲信号输出了。
这是标准资料:在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出脚的信号有个相位差,见下图:由此可见,如果输出1为高电平时,输出2出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1为高电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。
旋转编码器的原理及应用

旋转编码器的原理及应用
一、旋转编码器原理
旋转编码器是一种常用的编码器,它可以从一组电气脉冲输出一组特
定顺序的脉冲序列。
它的工作原理是,利用探测器(如光电传感器、磁光
传感器等)来探测物体的位置,通过电气脉冲来模拟出物体所处的位置,
然后通过驱动机构(如电机,步进电机或伺服电机)将物体的运动转化为
数字信号。
旋转编码器的原理是在回转元件或介质上安装一个记号,在该记号上
安装几个探测器,当记号转动时,探测器会输出一组电气脉冲,通过控制
器计算不同探测器输出的脉冲顺序,从而计算出回转元件或介质的位移量。
旋转编码器可以记录物体的运动方向和实际位移量,只要改变探测器输出
的脉冲频率,可以检测物体的位移速度。
二、旋转编码器应用
1、旋转编码测量:
2、旋转编码控制:。
旋转编码器控制步进电机定位案例
旋转编码器控制步进电机定位案例旋转编码器是一种能够将机械旋转运动转换成数字信号的传感器,它在许多自动控制系统中起着至关重要的作用。
步进电机则是一种将数字脉冲信号转换成机械运动的精密执行装置。
那么,我们来探讨一下旋转编码器控制步进电机定位的实际案例。
1. 硬件部分在这个案例中,我们需要准备一个步进电机和一个旋转编码器。
步进电机通过控制器接收数字脉冲信号,进而转动一定的角度。
而旋转编码器则可以监测步进电机转动的位置和方向。
这两者配合使用,可以实现精确的定位控制。
2. 软件部分除了硬件组成部分外,我们还需要编写控制程序来实现旋转编码器对步进电机的定位控制。
通过事先设定目标位置,并结合旋转编码器的反馈信息,控制程序可以实时地调整步进电机的运动状态,以达到精准的定位要求。
3. 实际应用在工业自动化设备中,旋转编码器控制步进电机的定位应用十分广泛。
在自动装配线上,需要对零部件进行精准的定位和装配;在数控机床上,需要对工件进行精密加工;在医疗设备中,需要对影像设备进行准确的定位等等。
这些都需要旋转编码器控制步进电机来实现。
4. 个人观点旋转编码器控制步进电机定位在工业自动化领域的应用非常广泛,而且随着技术的发展和创新,其应用范围还会不断扩大。
对于我来说,这个案例让我更深入地了解了数字控制系统在工业生产中的重要性,也让我对自动化控制技术有了更深层次的理解。
结语通过本案例的分析,我们了解了旋转编码器控制步进电机定位的原理和应用,同时也体会到了这种技术在工业自动化中的重要性和广泛性。
希望通过本文的共享,能够让更多的人对这一领域有所了解,也期待在未来能够看到更多基于旋转编码器控制步进电机的精准定位应用案例。
旋转编码器控制步进电机定位技术的发展和应用在工业自动化领域,旋转编码器控制步进电机的定位技术一直在不断发展和完善。
随着数字控制技术的不断进步,旋转编码器控制步进电机的应用范围也在逐渐扩大。
下面我们将进一步探讨这一技术的发展和应用情况。
旋转编码器怎么安装普通电动机上
旋转编码器怎么安装普通电动机上普通电动机的输出轴较短,在安装了带轮后,已经没有位置再安装旋转编码器了。
在这种情况下,通常可以把旋转编码器安装在电动机的后部。
1.轴套型旋转编码器的安装在电动机的后端盖上开一个孔,并在后部的轴上安装一个轴径与编码器匹配的过渡轴。
编码器的固定部分可通过一个S形薄钢片固定在电动机的后端盖上。
这种方法也适用于电动机的轴径与轴套型编码器的也径不相匹配时的安装。
但这种方法对两轴相对时的同心度要求较高,加工起来比较费事。
2.轴型编码器的安装安装轴型编码器时,可加装一个连接器。
连接器的两边分别和电动机的轴和编码器的轴相接。
两边的轴径可以相同,也可以不相同。
编码器的固定部分可以通过安装支架固定在电动机的端盖上。
因为连接器两侧的孔径都是按电动机轴和编码器轴的标准设计的,所以,安装起来比较方便。
1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
案例五旋转编码器的安装与应用
1.项目训练目的
掌握旋转编码器的安装与使用方法。
2.项目训练设备
旋转编码器及相应耦合器一套。
3.项目训练内容
先熟悉旋转编码器的使用说明书。
(1)旋转编码的安装步骤及注意事项
①安装步骤:
第一步:把耦合器穿到轴上。
不要用螺钉固定耦合器和轴。
第二步:固定旋转编码器。
编码器的轴与耦合器连接时,插入量不能超过下列值。
E69-C04B型耦合器,插入量 5.2mm;E69-C06B型耦合器,插人量 5.5mm;E69-Cl0B型耦合器,插入量7.lmm。
第三步:固定耦合器。
紧固力矩不能超过下列值。
E69-C04B型耦合器,紧固力矩2.0kfg・cm;E69-C06B型耦合器,紧固力矩 2.5kgf・cm;E69B-Cl0B型耦合器,紧固力矩4.5kfg・cm。
第四步:连接电源输出线。
配线时必须关断电源。
第五步:检查电源投入使用。
②注意事项:
采用标准耦合器时,应在允许值内安装。
如图5-1所示。
图5-1 标准耦合器安装
连接带及齿轮结合时,先用别的轴承支住,再将旋转编码器和耦合器结合起来。
如图
5-2所示。
图5-2 旋转编码器安装
齿轮连接时,注意勿使轴受到过大荷重。
用螺钉紧固旋转编码器时,应用5kfg・cm左右的紧固力矩。
固定本体进行配线时,不要用大于3kg的力量拉线。
可逆旋转使用时,应注意本体的安装方向和加减法方向。
把设置的装置原点和编码器的Z相对准时,必须边确定Z相输出边安装耦合器。
使用时勿使本体上粘水滴和油污。
如浸入内部会产生故障。
(2)配线及连接
①配线应在电源0FF状态下进行。
电源接通时,若输出线接触电源线,则有时会损坏输出回路。
②若配线错误,则有时会损坏内部回路,所以配线时应充分注意电源的极性等。
③若和高压线、动力线并行配线,则有时会受到感应造成误动作或损坏。
④延长电线时,应在10m以下。
还由于电线的分布容量,波形的上升、下降时间会延长,所以有问题时,应采用施密特回路等对波形进行整形。
还有为了避免感应噪声等,也要尽量用最短距离配线。
集成电路输人时,要特别注意。
⑤电线延长时,因导体电阻及线间电容的影响。
波形的上升、下降时间变长,容易产
生信号间的干扰(串音),因此应使用电阻小、线间电容低的电线(双绞线、屏蔽线)。